基于AMESim的高空作业车支腿液压系统仿真分析
2018-05-24王志红卢梦成尹冬冬秦可
王志红,卢梦成,尹冬冬,秦可
(武汉理工大学现代汽车零部件技术湖北省重点实验室,汽车零部件技术湖北省协同创新中心,湖北 武汉 430000)
前言
高空作业车是运送工作人员和使用器材到现场并进行空中作业的专用车辆[1]。随着我国城市化进程的加快,在基础设施建设时需要大量的高空作业设备,因此高空作业车具有广阔的市场前景。论文针对新开发的一款25米高空作业车,主要介绍其支腿液压系统,其特点是支腿液压系统中,水平及垂直支腿均能独立控制,能够适应不同的作业环境。利用AMESim软件对支腿液压系统进行仿真分析,能够模拟支腿系统在不同作业环境下的调平过程,验证了所设计的支腿液压系统的合理性,并研究了不同泵转速对支腿液压系统伸缩效率的影响,同时为其他车型的支腿液压系统的设计提供参考。
1 支腿液压系统原理
现在工程机械多采用的是H型液压支腿,该支腿的特点是对地形的适应性强,调平容易,且在反力变化时基本没有爬行等现象,因此应用十分广泛[1]。
高空作业车支腿液压系统由支腿操纵阀,支腿选择阀,支腿水平伸缩油缸,支腿垂直伸缩油缸等组成,如图1所示。泵开启,当二位三通选择阀操纵杆处于下位时,液压油进入上车液压系统;反之,液压油进入下车支腿液压系统。本车是通过该二位三通选择阀来切换上车、下车液压回路。支腿系统调平时,首先可分别或同时操控支腿操纵阀,操纵阀都处于下位,再操控支腿选择阀处于上位,支腿水平油缸同时伸出;反之,则缩回。同理,可控制支腿垂直油缸。若由于作业环境要求需单独调整某支腿水平伸缩油缸或垂直伸缩油缸时,只需操控相应支腿操纵阀杆处于相应位置,再操纵支腿选择阀即可。每一个水平和垂直支腿油缸上都配有一个双向液压锁,使支腿能够锁住,防止高空作业车在作业过程中由于支腿油缸上腔油路泄露引起“软腿”现象或行车过程中液压支腿油缸由于下腔油路泄露引起的自行下落。

图1 下车支腿液压系统
2 支腿液压系统建模仿真
AMESim是法国IMAGINE公司推出的一款可用于流体动力、机械、热流体和控制系统仿真分析的软件。AMESim采用基于物理模型的图形化建模方式,为用户提供了丰富的元件应用库。通过AMESim软件进行建模时,可根据支腿液压系统原理图,在保证性能要求的情况下能够适当简化建模,在 AMESim 的液压、机械、信号库中通过选择相应的元件模型构建出支腿调平回路的仿真模型,并对每个元件选取子模型。AMESim 液压中的电磁阀可以作为伺服阀、比例阀和换向阀用,根据液压系统实际情况本仿真模型中需要五个电磁换向阀[2]。模型中的电磁换向阀,都是通过输入的控制信号改变液压油流向,换向阀的控制信号在每个阶段都是常数,信号为阶跃信号[3-5]。
在建模时将液压系统的管道假设为刚性,没有考虑管道的长度。根据支腿的液压系统原理图在 AMESim 中建立的仿真模型如图 2所示。

图2 高空作业车支腿液压系统仿真模型
2.1 系统模型的元件分析与参数设置
2.1.1 主要液压元件参数设置
在AMESim参数模式中设置所有的液压元件参数,表1中列出了主要的液压元件参数。
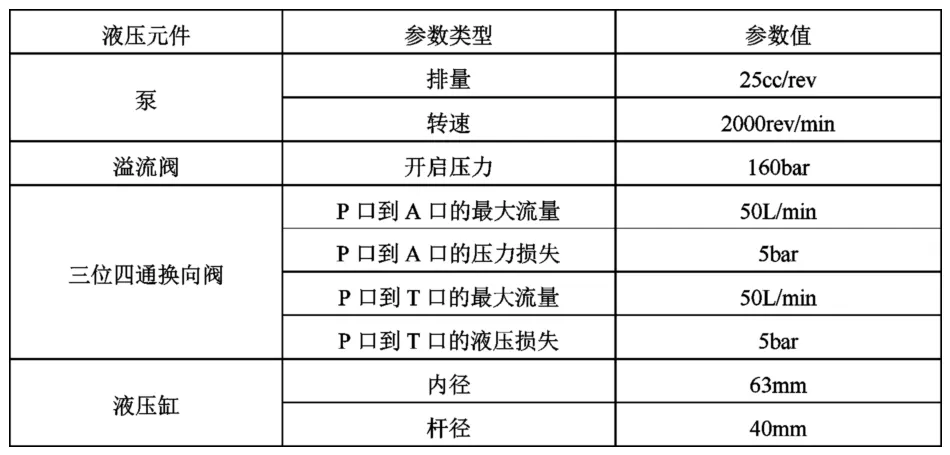
表1 主要液压元件仿真参数
2.1.2 信号源参数设置
本平台液压系统根据支腿实际运动过程对模型元件进行参数设置,分析支腿调节回路的动态过程[6-7]。
各支腿的运动过程如下:
假设水平支腿1、2液压缸向外伸出运行5秒后停止;水平支腿液压缸3、4向外伸出3秒后停止;此时达到水平位置要求。
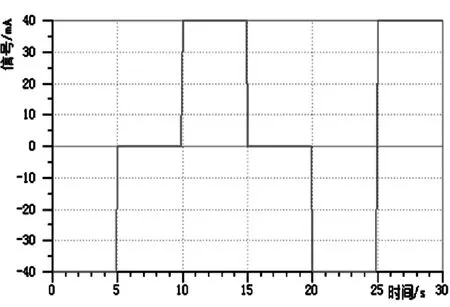
图3 信号源1、2曲线
假设垂直支腿1、2液压缸向外伸出5秒后停止;垂直支腿3、4液压缸向外伸出3秒后停止;此时达到垂直位置要求。
达到位置要求后,换向阀处于中位,支腿处于浮动状态。工作完成后,垂直支腿先同步缩回,水平支腿之后同步缩回。
按照以上运动过程分别设置控制电磁换向阀的信号源,四个信号源的信号皆为阶跃信号。设置信号源1、2如图3;信号源3、4如图4;信号源5如图5。
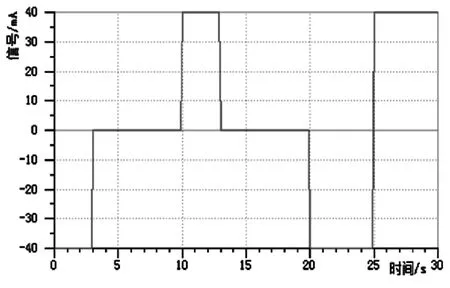
图4 信号源3、4曲线
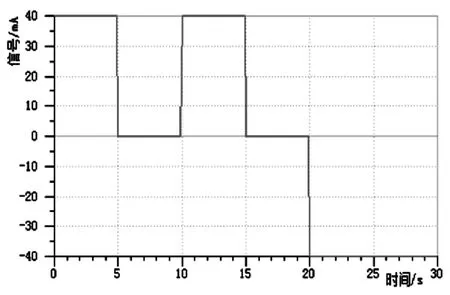
图5 信号源5曲线
2.2 支腿液压系统的仿真结果分析
下面调取仿真模型中水平支腿1回路中的流量曲线并作分析。
2.2.1 三位四通换向阀流量分析
支腿1回路中换向阀的P口与A口,B口与T口的流量变化曲线如图6、图7所示。
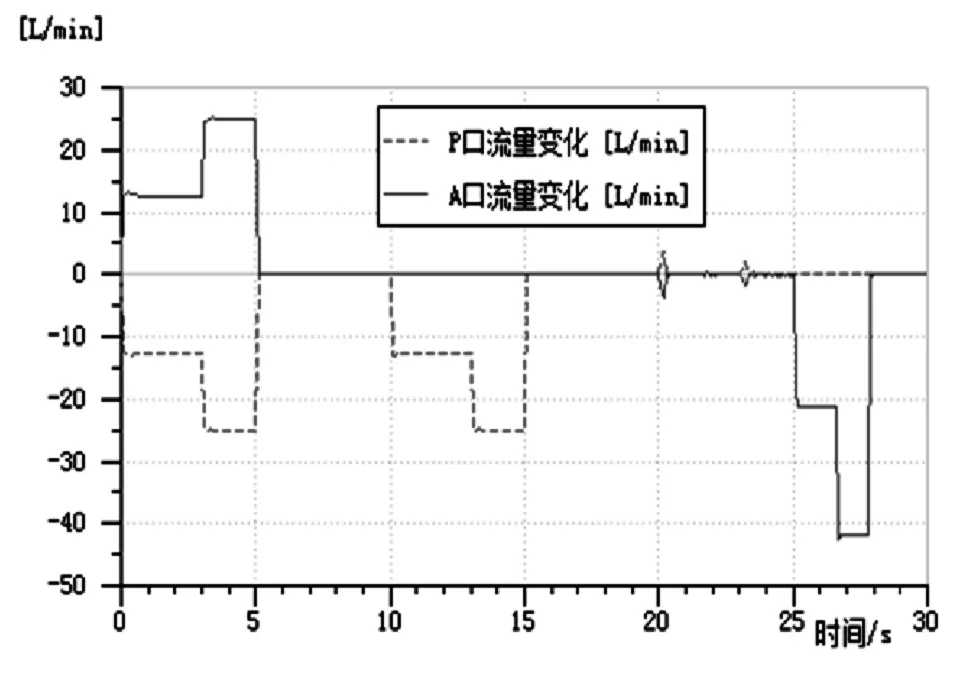
图6 支腿1回路中换向阀P口与A口的流量变化曲线

图7 支腿1回路中换向阀B口与T口的流量变化曲线
由图6和图7可以看出在0~5s时间内电磁阀下位导通P、A供油,由于3s后水平支腿3、4停止运动,故流量增加;5~10s电磁阀处于中位,不向执行件供油;10~15s时间内电磁阀上位导通P、B供油,由于13s后垂直支腿3、4停止运动,故流量增加;15~20s电磁阀处于中位,不向执行件供油;20~25s电磁阀下位导通B、T回油,垂直支腿缩回,由于23s后垂直支腿 3、4已收回,故流量增加;25~30s电磁阀上位导通A、T回油,水平支腿缩回。
2.2.2 支腿液压缸位移分析
四只水平支腿液压缸活塞杆的位移变化曲线如图8。
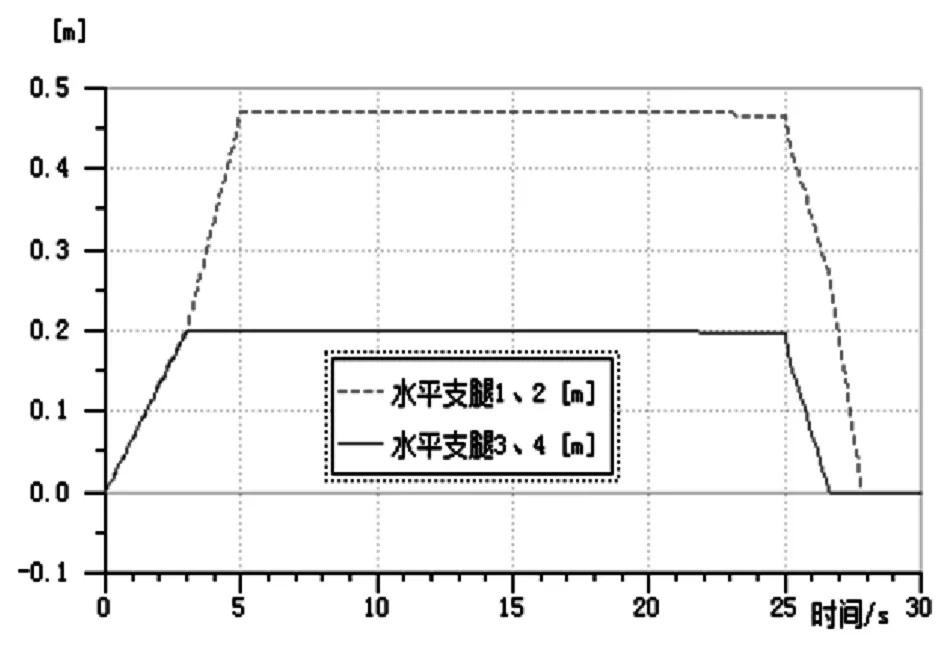
图8 四只水平支腿活塞杆运动曲线
由于假设作业环境时各水平支腿和垂直支腿所处地势不同,故调平高空作业车底盘时,各支腿液压缸的位移是不同的。由图可知,0~5s水平支腿 1、2伸出大约 0.48m,0~3s水平支腿3、4伸出0.2m;此时水平方向达到平衡状态。5~25s水平支腿保持动作;25~30s所有水平支腿缩回,由于水平支腿3、4伸出位移较小,故比水平支腿1、2先缩回。
四只垂直支腿液压缸活塞杆的位移变化曲线如图9。
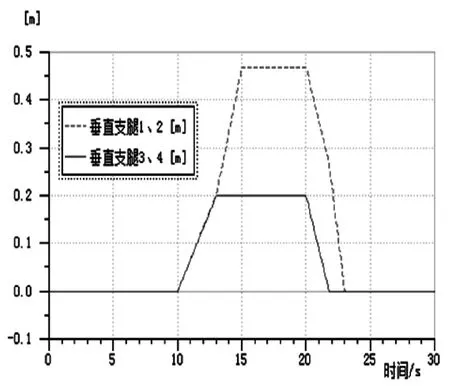
图9 四只垂直支腿活塞杆运动曲线
由图可知,0~10s垂直支腿不动作;10~15s垂直支腿1、2伸出约0.48m,10~13s垂直支腿3、4伸出约0.2m;此时垂直方向达到平衡状态。15~20s垂直支腿保持动作;20~25s所有垂直支腿缩回,由于垂直支腿3、4伸出位移较小,故比垂直支腿1、2先缩回。
3 泵转速对支腿液压系统的影响
在已经建立好的支腿液压系统AMESim模型中,对泵的转速进行批处理[8],研究泵转速为2000r/min、2500 r/min以及3000r/min时对水平及垂直支腿伸缩位效率的影响。
3.1 泵转速对水平支腿液压缸伸缩位移的影响
不同泵转速下,水平支腿液压缸活塞杆位移随时间的变化如图10所示。由图可知,转速越大,活塞杆伸缩的速度越快,活塞杆完全伸出和缩回的总时间越快;泵的转速对水平支腿液压缸伸出效率影响比缩回时的影响大。
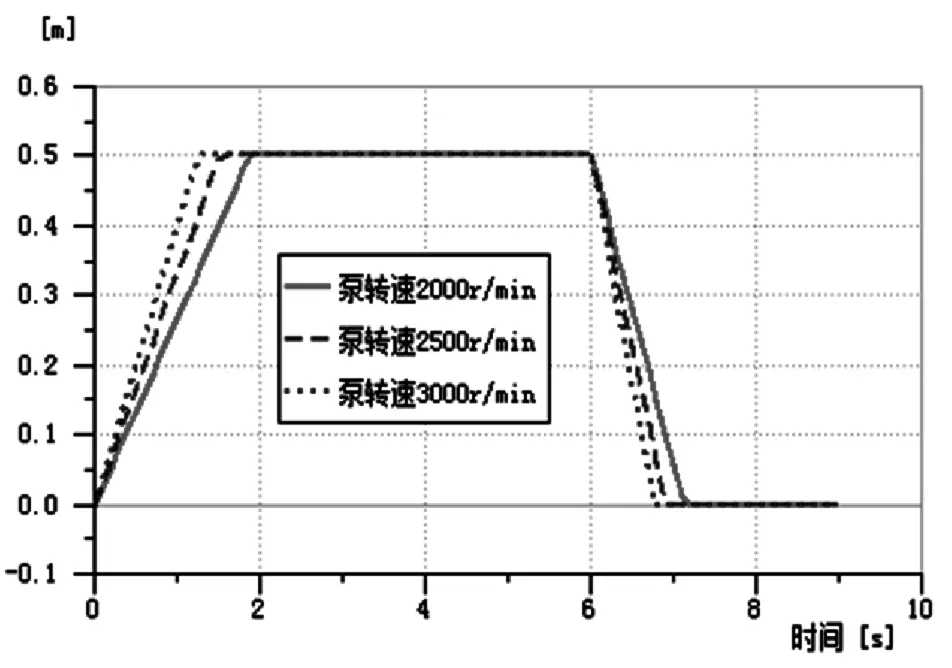
图10 三种不同泵转速下水平支腿活塞杆位移
3.2 泵转速对水平支腿液压缸伸缩速度的影响
在三种不同泵转速下,水平支腿液压缸活塞杆运动速度随时间的变化如图11所示。由图可知,转速越大,活塞杆伸缩的速度越大,但是在泵转速为 2500r/min时,水平支腿液压缸活塞杆伸出时的运动速度波动较大,运动稳定性较差,水平支腿液压缸活塞杆缩回时的运动速度较为平稳;泵转速分别为2000r/min和3000r/min时,水平支腿液压缸活塞杆的伸缩运动速度都较为平稳。

图11 三种不同泵转速下水平支腿活塞杆运动速度
3.3 泵转速对垂直支腿液压缸伸缩位移的影响
在三种不同泵转速下,垂直支腿液压缸活塞杆位移随时间的变化如图12所示。由图可知,转速越大,活塞杆伸缩的速度越快,活塞杆完全伸出和缩回的总时间越快;泵的转速对垂直支腿液压缸伸出效率影响比缩回时的影响大。

图12 三种不同泵转速下垂直支腿活塞杆运动位移
3.4 泵转速对垂直支腿液压缸伸缩速度的影响
在三种不同泵转速下,垂直支腿液压缸活塞杆运动速度随时间的变化如图13所示。由图可知,转速越大,活塞杆伸缩的速度越大,但是在泵转速为 2500r/min时,垂直支腿液压缸活塞杆伸出时的运动速度波动较大,运动稳定性较差,水平支腿液压缸活塞杆缩回时的运动速度较为平稳;泵转速分别为2000r/min和3000r/min时,垂直支腿液压缸活塞杆的伸缩运动速度都较为平稳。
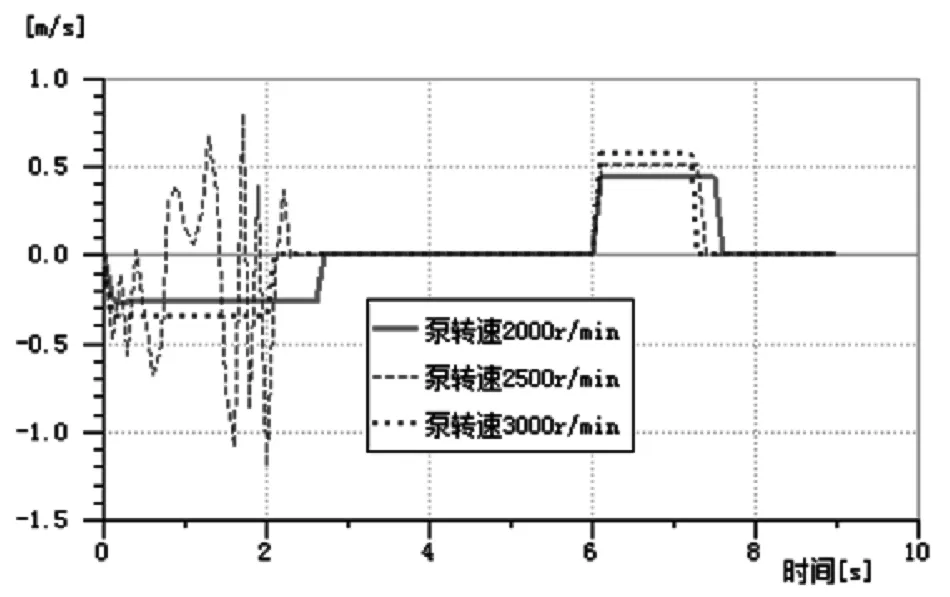
图13 三种不同泵转速下垂直支腿活塞杆运动速度
4 结论
(1)对高空作业车支腿液压系统的调平特性进行了仿真分析,仿真结果表明水平支腿及垂直支腿均能单独控制,解决了高空作业车在不同工作环境下的底盘调平问题。
(2)泵的转速越大,水平和垂直支腿伸缩速度越快。通过加大油门可以提高泵的转速,从而提高水平及垂直支腿的伸缩效率,但是在泵转速为 2500r/min时,水平及垂直支腿伸出时的活塞杆的运动稳定性较差,高空作业车支腿液压系统液压缸伸出工作时应注意避免该工况。
(3)通过AMESim仿真软件对高空作业车支腿液压系统进行仿真分析,能够较为直观的反映出支腿伸缩的运动特性,使用AMESim软件中的批处理功能能够研究泵的转速变化对支腿伸缩效率及运动稳定性的影响,为其他相关车型的液压系统设计提供了参考。
参考文献
[1] 乔维高.专用汽车结构与设计[M].北京∶北京大学出版社,2010.
[2] 吴涛,徐延海,孙仁云.基于 AMESim 的随车起重运输车支腿垂直液压缸回路仿真研究[J].西华大学学报(自然科学版),2009,28(4)∶30-32.
[3] 付永领,祁晓野.AMESim系统建模和仿真[M].北京∶北京航空航天大学出版社,2006.
[4] Fleischfresser,Wolfgang.Hydraulic systems in mobile aerialwork platforms[J].Diesel Progress International Edition,2003,22 (4) ∶42-44.
[5] David Gagne,Franck Sellier, Cedric Roman.Simulation and design process of mechatronics system[J].Recent Advances in Aerospace Actuation Systems and Components[4],June 13-15,2001.
[6] 张涛,曹俊,高宏力等.基于AMESim的QY-8型汽车起重机液压系统仿真[J].工程技术与产业经济,2012(4)∶28-30.
[7] 杜二超,刘晓婷,邹杰等.基于 AMESim 的高空作业平台底盘调平液压的仿真分析[J].起重机运输机械,2013(9)∶63-66.
[8] 梁全,谢基晨,聂利卫.液压系统Amesim计算机仿真进阶教程[M].北京∶机械工业出版社,2016.
