工程机械支腿自动展收的研究
2014-06-06肖飞张之善曾阳
肖飞,张之善,曾阳
(三一汽车制造有限公司,湖南长沙 410100)
为了满足工程机械的作业要求,同时便于在不同工地之间进行转场,工程机械一般具有适当的行驶机构和多个布置在其主体周围的可伸缩支腿。通过操作支腿,可以使工程机械在行驶状态和施工状态之间转换。在行驶状态下,各支腿收拢,工程机械能够通过行驶机构在路面上行驶,实现转场;在施工状态下,支腿伸出并支撑在预定的基础上,为工程机械提供更大的支撑跨度和支撑强度,保证工程机械施工作业的安全。
1 手工展开工程机械支腿存在的问题
工程机械由行驶状态转换为施工状态,或从施工状态转化为行驶状态时,一般需要操作人员根据自身经验或现场观察进行操作,通常按照预定的顺序反复调整各支腿的长度,以调整工程机械高度。调整时,各支腿长度变化不能过大,以避免由于支腿之间长度之差过大,使工程机械倾斜角度过大,产生倾翻的危险,影响其安全性。
因此手工操作方式对操作人员的个人经验和现场观察判断能力依赖性很大。同时,通过人工反复调节各支腿的长度,也使得操作过程非常繁琐、复杂,降低了工程机械状态转换的操作效率。
另外,在手工操作时,操作人员无法准确平衡各支腿提供的支撑力,因此在完成操作后,很容易出现一个或两个支腿提供的支撑力过小或不提供支撑力的情况,导致一个或两个支腿为虚腿,影响工程机械施工作业的稳定性和可靠性。
2 工程机械支腿自动展收结构
为实现工程机械支腿自动展收的功能,需要对支腿的状态进行监控和反馈。图1为实现工程机械支腿自动展收功能的液压原理图。接近开关D1~D8用来反馈工程机械支腿展开和收拢时到位情况。压力传感器P1~P8用来反馈工程机械支腿下撑和缩回时油缸的大小腔压力。压力传感器P0用于对失效的接近开关进行报警。双轴传感器检测工程机械的倾斜状态并反馈到控制器,以保证支腿水平下撑和缩回。在整个自动展收过程中,声光报警装置持续工作,提醒在场人员避让支腿,以免发生人身安全事故。
3 工程机械支腿自动展收控制原理
在进行支腿动作之前,需要预先打开支腿锁,并确保工程机械的工作装置 (如汽车起重机的吊臂等)处于完全收拢并安全放置的状态。
(1)支腿自动展开控制原理
在支腿自动展开下撑时,首先通过到位开关检测工作装置是否已经处于完全收拢并安全放置的状态;然后开启声光报警器并提升发动机转速;接下来将两侧支腿自动依次展开并依次自动下撑到接触地面;之后开启自动调平,使所有支腿自动下撑到支撑位置;最后完成支撑,发动机回到怠速并关闭声光报警器。支腿自动展开下撑工作流程如图2所示。
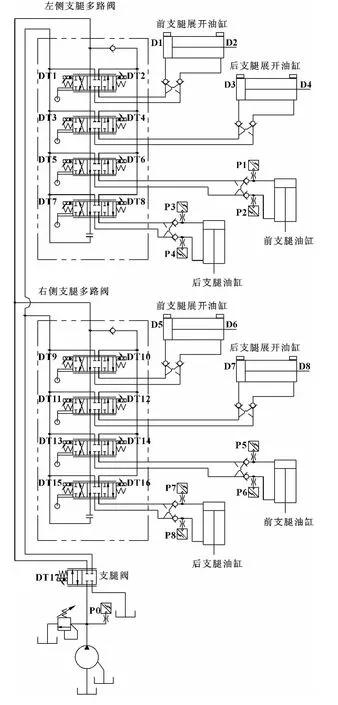
图1 支腿自动展收功能液压原理图
图2中的左侧支腿全部展开、右侧支腿全部展开、左侧支腿下撑到接触地面、右侧支腿下撑到接触地面、支腿下撑调平在后文有详细的介绍。
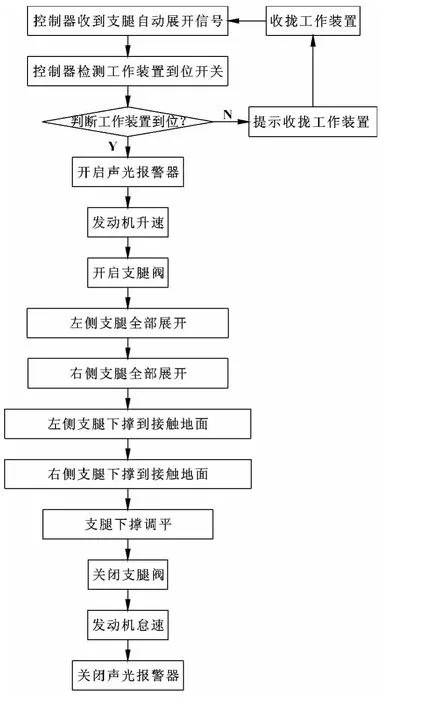
图2 支腿自动展开下撑工作流程图
(2)支腿自动收拢控制原理
在支腿自动缩回收拢时,首先通过到位开关检测工作装置是否已经处于完全收拢并安全放置的状态;然后开启声光报警器并提升发动机转速;接下来开启自动调平,使所有支腿自动缩回直到某一支腿恰好接触地面;之后所有支腿自动缩回到位,并将两侧支腿自动依次收拢;最后完成收拢,发动机回到怠速并关闭声光报警器。支腿自动缩回收拢工作流程如图3所示。
图3中的支腿缩回调平、支腿全部缩回、左侧支腿全部收拢、右侧支腿全部收拢在后文有详细的介绍。
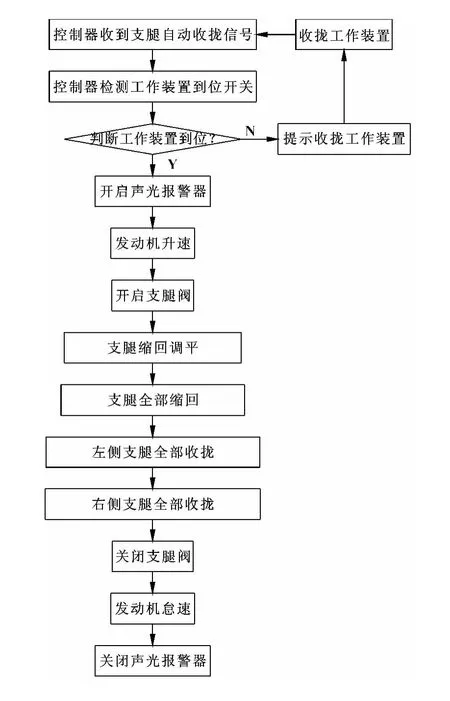
图3 支腿自动缩回收拢工作流程图
4 工程机械支腿自动展收具体实施方法
(1)支腿自动展开下撑工作流程
在进行支腿自动展开下撑前,操作人员应确认所有支腿锁已全部开启。当操作人员通过遥控/近控功能进行支腿自动展开操作时,控制器收到自动展开电信号,首先检查工作装置到位开关是否闭合,判断其是否收拢到位。假如工作装置未收拢到位,则不进行支腿自动展开操作,并通过显示屏提醒操作人员收拢工作装置。假如工作装置已收拢到位,则控制器开启声光报警器,并在一定延时后提升发动机转速,以保证现场人员安全撤离支腿工作区域。
控制器开启支腿阀,并使图1中的电磁阀DT2、DT4得电,使左侧支腿同时伸展,并根据接近开关的反馈值判断左侧支腿是否伸展到位,如图4所示。假如某条支腿未伸展到位,则其对应的电磁阀继续得电,直到支腿伸展到位。假如某条支腿已伸展到位,则关闭其对应的电磁阀停止伸展。在完成左侧支腿伸展后,DT10、DT12得电,右侧支腿同时伸展,如图5所示。在支腿伸展过程中,如果接近开关发生故障,则通过判断压力传感器P0是否溢流,完成支腿伸展操作,并对发生故障的接近开关进行报错。当所有支腿伸展到位后,控制器开始控制支腿进行下撑操作。
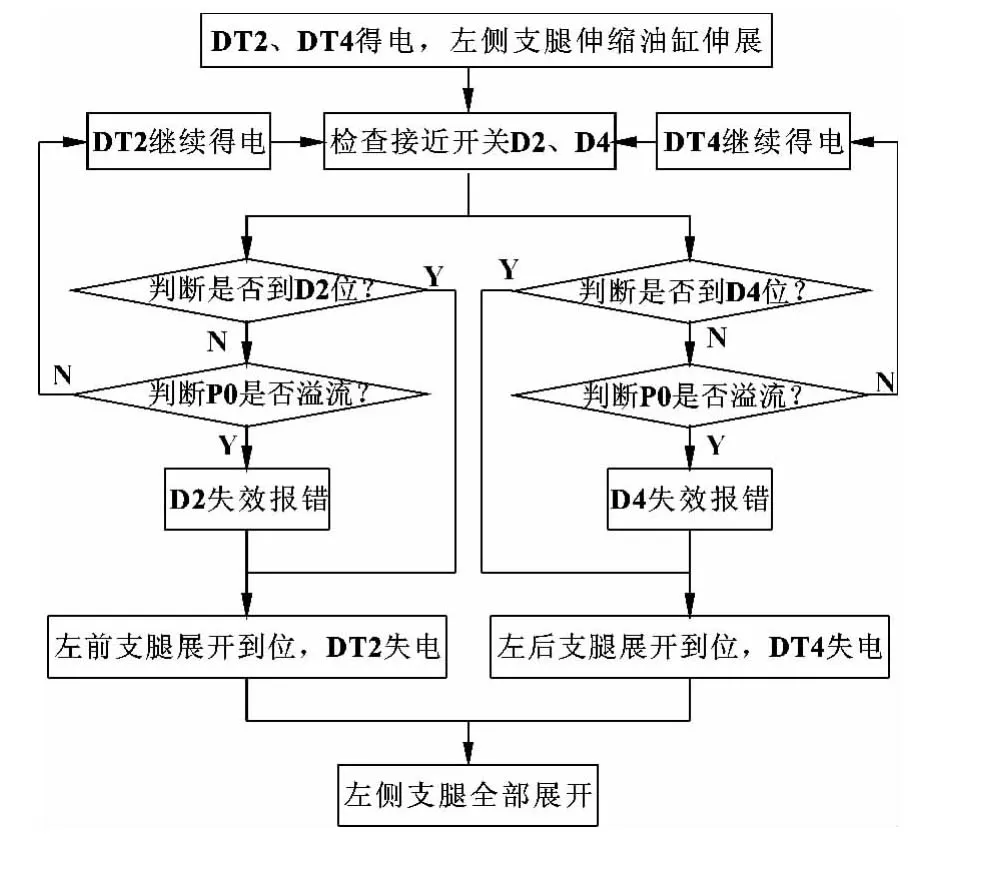
图4 左侧支腿全部展开工作流程图
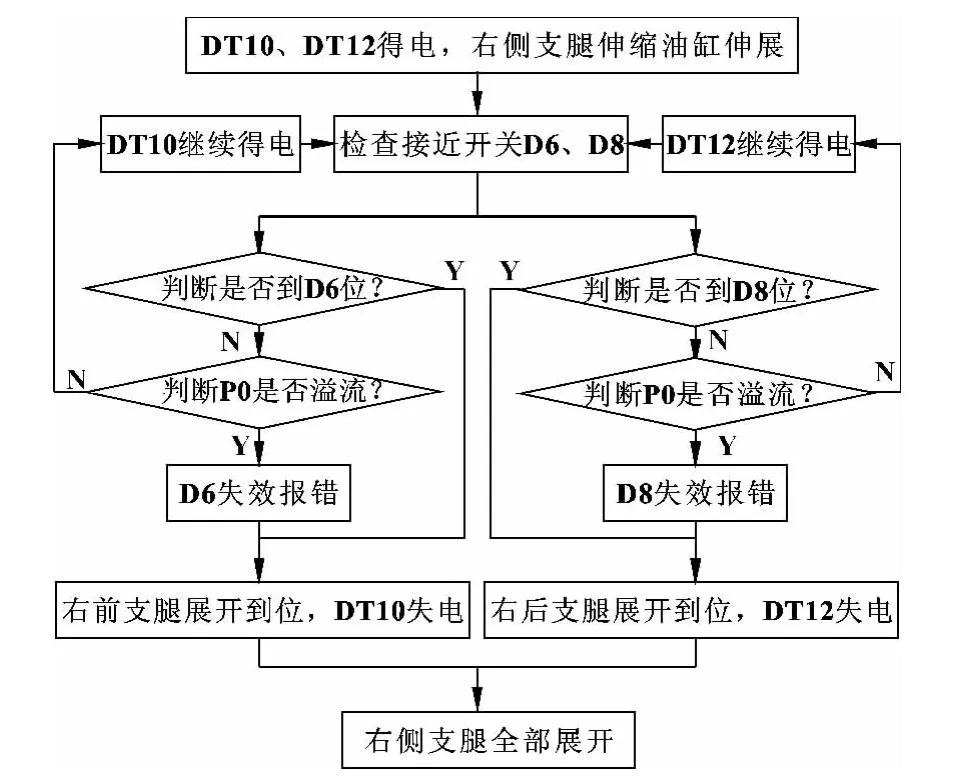
图5 右侧支腿全部展开工作流程图
支腿下撑操作分两步进行:
第一步,使图1中的电磁阀DT6、DT8得电,左侧支腿同时下撑至接触地面,如图6所示。下撑时,检测支腿支撑油缸两端的压力,并计算支撑油缸活塞两端的作用力。当油缸大腔作用力小于小腔作用力时,则认为支腿未接触地面,其对应的电磁阀继续得电,直到支腿接触地面。当油缸大腔作用力恰好略大于小腔作用力时,则认为支腿接触地面,关闭其对应的电磁阀停止下撑。例如左前支撑油缸大腔压力为p1,其作用力为F1,小腔压力为p2,其作用力为F2。当支腿悬空时,小腔作用力F2等于大腔作用力F1、油缸活塞杆重力和支座重力之和,即F2>F1。当支腿接触地面瞬间,小腔作用力F2等于大腔作用力F1,油缸活塞杆重力和支座重力之和等于地面的支撑力。因此,设定支腿接触地面的条件为大腔作用力F1恰好略大于小腔作用力F2。然后,使图1中的电磁阀DT14、DT16得电,右侧支腿同时下撑至接触地面,如图7所示。当支腿全部接触地面后,控制器开始控制支腿进行第二步操作。
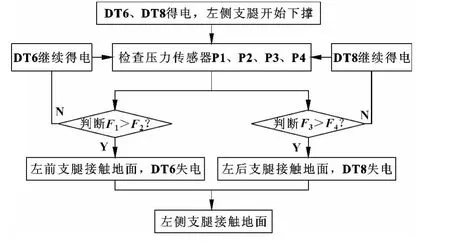
图6 左侧支腿下撑到接触地面工作流程图
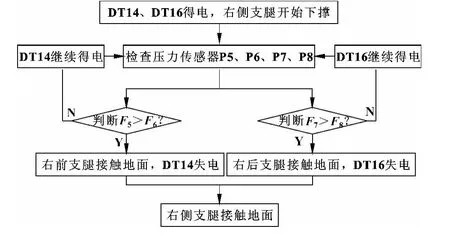
图7 右侧支腿下撑到接触地面工作流程图
第二步,使图1中的电磁阀DT6、DT8、DT14、DT16得电,所有支腿同时下撑到位,如图8所示。
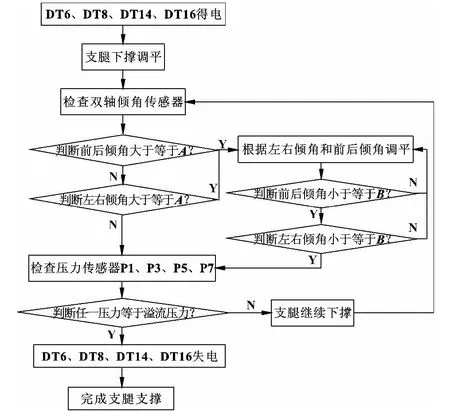
图8 支腿下撑调平工作流程图
下撑时,通过检测双轴倾角传感器判断工程机械倾斜状态。假如工程机械前后倾角和左右倾角均小于角度A,则所有支腿同时以最大速度下撑,直到某条支腿的大腔压力达到溢流压力,表明该支腿支撑到位。这时,电磁阀DT6、DT8、DT14、DT16同时失电,完成支腿支撑。假如下撑时,工程机械前后倾角或左右倾角大于角度A,则进行调平。调平时,如果检测到工程机械前后倾角和左右倾角均小于角度B,则结束调平,所有支腿同时以最大速度下撑,否则继续进行调平操作。为避免工程机械支腿下撑时频繁进行调平操作,设定上述角度A大于角度B。
完成上述操作后,控制器关闭支腿阀,然后发动机进入怠速并关闭声光报警器。
(2)支腿自动缩回收拢工作流程
支腿自动缩回收拢时的工作装置到位开关检测过程与支腿自动伸展下撑时的操作相同。假如工作装置已收拢到位,则控制器开启声光报警器,并在一定延时后提升发动机转速,以保证现场人员安全撤离支腿工作区域。
控制器开启支腿阀,进行支腿缩回操作,分两步进行:
第一步,使图1中的电磁阀DT5、DT7、DT13、DT15得电,所有支腿同时缩回直到某一支腿恰好接触地面,如图9所示。缩回时,通过检测双轴倾角传感器判断工程机械倾斜状态。假如工程机械前后倾角和左右倾角均小于角度A,则所有支腿同时以最大速度缩回,直到某条支腿的大腔作用力恰好略小于小腔作用力,表明该支腿缩回到恰好接触地面。假如在上述缩回过程中,工程机械前后倾角或左右倾角大于角度A,则进行调平。调平时,如果检测到工程机械前后倾角和左右倾角均小于角度B,则结束调平,所有支腿同时以最大速度缩回,否则继续进行调平操作。当某一支腿缩回到恰好接触地面后,控制器开始控制支腿进行第二步操作。
第二步,继续使图1中的电磁阀 DT5、DT7、DT13、DT15得电,所有支腿同时缩回到位,如图10所示。缩回时,如果某条支腿支撑油缸小腔压力达到溢流压力,表明该支腿缩回到位,则其对应的电磁阀失电。所有支腿同时以最大速度缩回。当电磁阀DT5、DT7、DT13、DT15全部失电时,完成支腿缩回。
控制器使图1中的电磁阀DT1、DT3得电,左侧支腿同时收拢,并根据接近开关的反馈值判断左侧支腿是否收拢到位,如图11所示。假如某条支腿未收拢到位,则其对应的电磁阀继续得电,直到支腿收拢到位。假如某条支腿收拢到位,则关闭其对应的电磁阀停止收拢。在完成左侧支腿收拢后,DT9、DT11得电,右侧支腿同时收拢,如图12所示。在支腿收拢过程中,如果接近开关发生故障,则通过判断压力传感器P0是否溢流,完成支腿收拢操作,并对发生故障的接近开关进行报错。
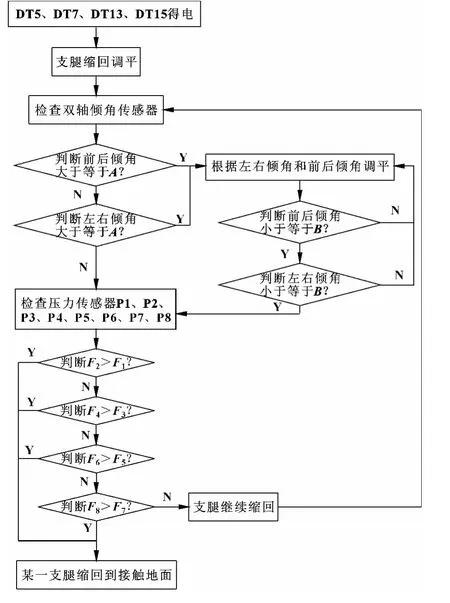
图9 支腿缩回调平工作流程图
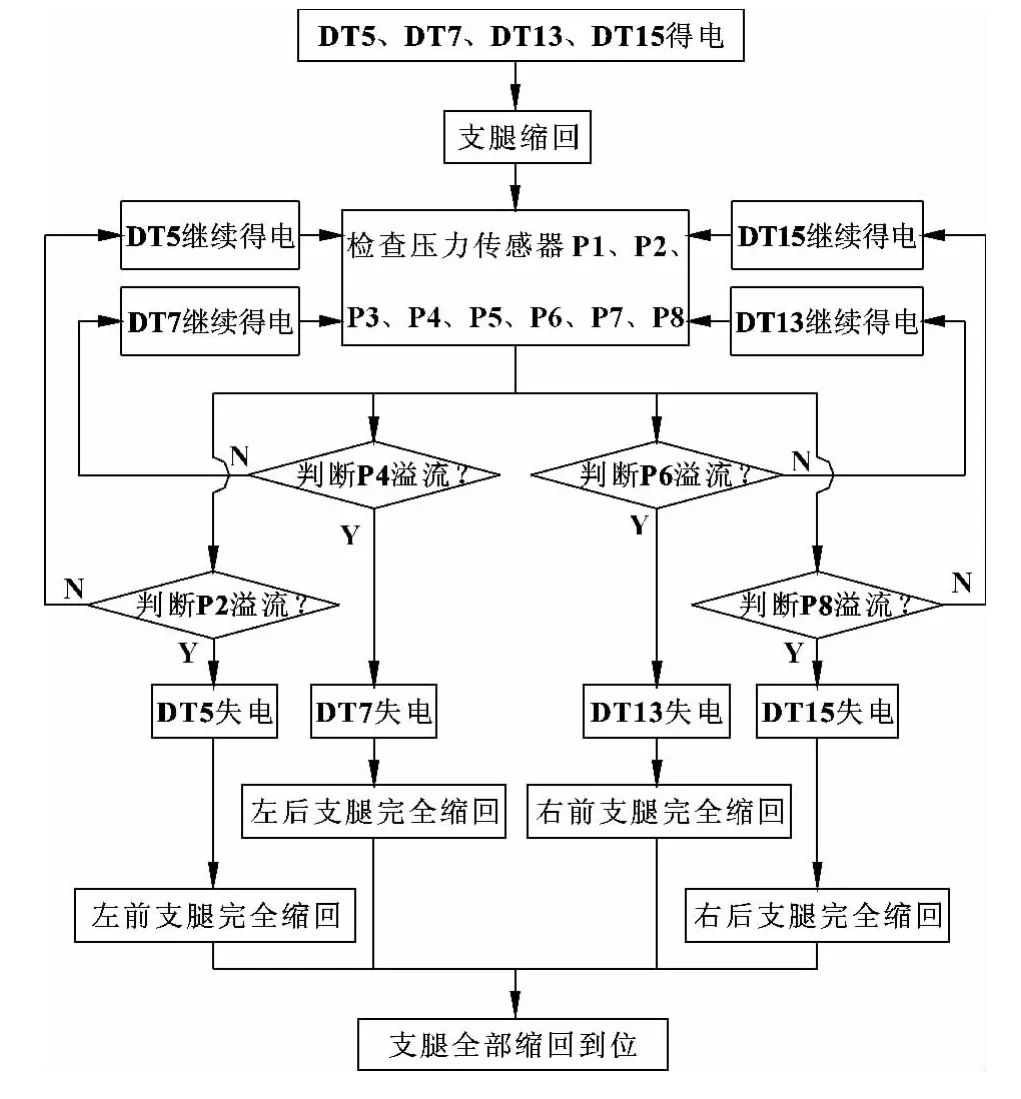
图10 支腿全部缩回工作流程图
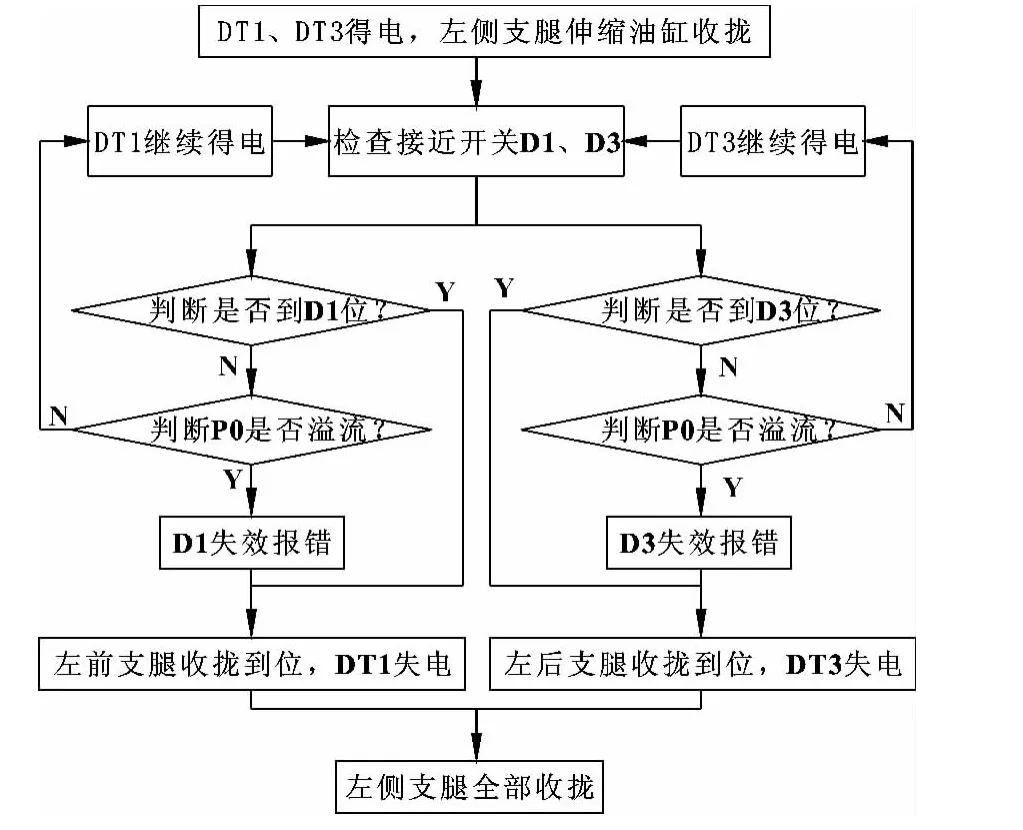
图11 左侧支腿全部收拢工作流程图
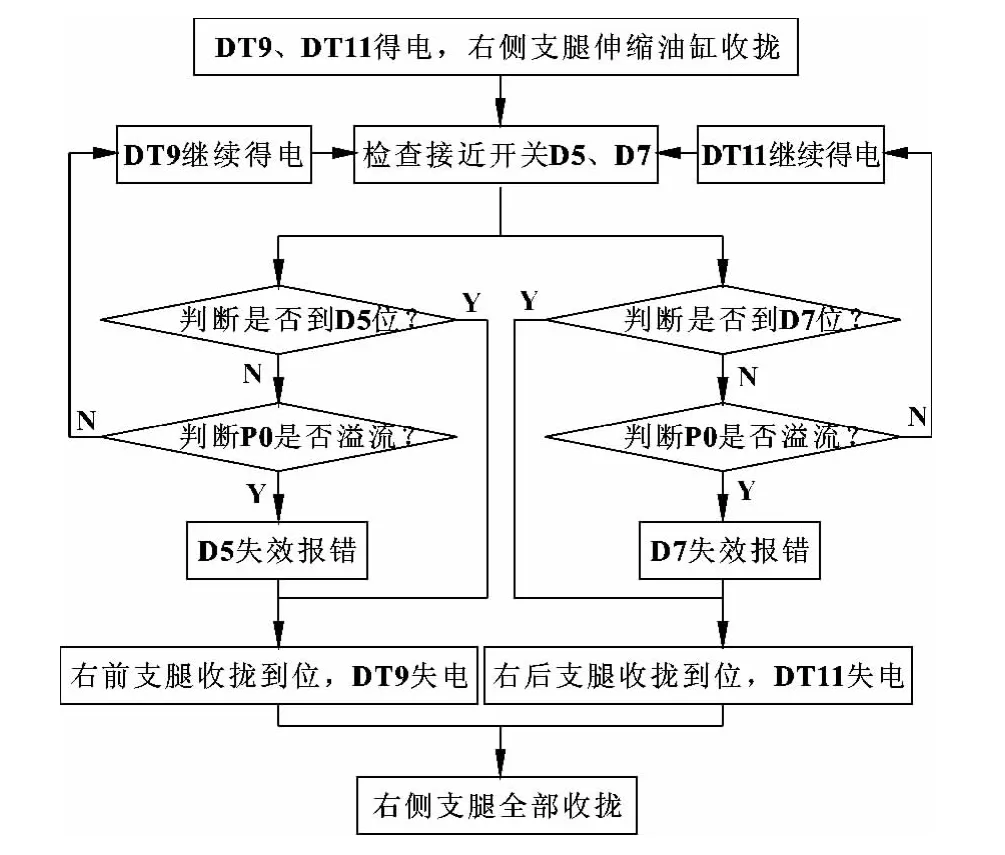
图12 右侧支腿全部收拢工作流程图
完成上述操作后,控制器关闭支腿阀,然后发动机进入怠速并关闭声光报警器。
5 工程机械支腿自动展收附加报警功能
工程机械在进行支腿自动展收时,通过声光报警、支腿接近开关故障报警和支腿虚支撑报警对支腿的工作状态和存在的安全隐患进行反馈。
(1)通过在工程机械上安装声光报警器,在进行支腿自动展收时,提醒现场人员避让,避免发生人身伤害。
(2)当支腿接近开关发生故障时,支腿展收操作因得不到接近开关的反馈而不能停止。通过判断压力传感器P0是否达到溢流压力,则可以停止已经到位的支腿展收操作并反馈发生故障的接近开关。
(3)当支腿下撑进行调平时,支腿油缸大腔压力作用力大于其小腔压力作用力。如果某一支腿油缸大腔压力作用力等于其小腔压力作用力,则认为该支腿虚撑。如果在某一支腿虚撑时,另外任意一条支腿有虚撑趋势时,控制器将向操作人员进行支腿虚撑报警。
6 结论
综上所述,通过对工程机械支腿自动展收功能的研究,实现支腿自动展收及其附加报警功能。对于具体的下撑 (缩回)调平算法等,可进行更深入的研究,在此仅抛砖引玉。
[1]易小刚,易秀明,王尤毅,等.三一职业技能培训丛书:混凝土泵车[M].长沙:三一重工股份有限公司,2007:98.
[2]张国忠.现代混凝土泵车及施工应用技术[M].北京:中国建材工业出版社,2004:68-70.
[3]吴晓明,赵燕,翟瑞超,等.基于AEMSim的凿岩台车支腿伸缩回路特性分析[J].流体传动与控制,2010(5):5-7.
[4]汤辛华.专用汽车支腿阀的工作原理及使用状况[J].商用汽车,2011(6):58-59.
[5]宁富立,成凯,冯敏.基于ANSYS的混凝土泵车伸缩支腿的接触分析[J].建筑机械:上半月,2010(12):113-116.