一种过载控制辅助实现快速估算滚转角的方法
2018-05-18孙友路遥赵耀吴广
孙 友 路 遥 赵 耀 吴 广
北京航天自动控制研究所,北京100854
制导炮弹控制系统采用GPS-INS组合制导模式,采用空气舵实现弹体稳定控制。空中加电后,制导炮弹惯性导航系统必须自主辨识出弹体初值姿态信息后,才可进行后续的导航计算。可通过卫星导航的速度信息初步获得俯仰角和偏航角;因此在初始姿态的确定过程中,最关键的环节是对滚转姿态角的获取。

随着现代军事科技的发展,低成本高精度卫星定位系统(GPS)在导航系统中得到了广泛应用。随着美国取消SA (Selective Availability选择可用性)政策以来,GPS单点定速精度大幅提高,不论利用原始多普勒观测值直接计算,还是通过载波相位中心差分所获得的多普勒观测值计算速度,其定位精度均能够达到0.1m/s。同时随着器件水平的提高,接收机处理器计算速度也不断提高:通过注入星历、概略位置及电离层参数等诸元信息可实现接收机上电后2~5s内快速定位,同时接收机刷新频率也可达到10~100Hz范围。以上特点为制导炮弹空中加电后快速获取相对准确的导航信息奠定了基础。
本文利用GPS接收机定位相对速度比较准确的特性,通过微分提取器获取不随时间累积的地理坐标系下的加速度信息,与捷联惯组系统敏感的弹体系下加速度比较后提取出滚转姿态角。在此过程中要考虑有效横法向过载和GPS接收机噪声之间的信噪比问题和地球重力加速度的影响。
1 滚转角的估算原理及实现方法
1.1 加速度矢量转换模型
由理论力学[5]可知:在惯性坐标系中任一矢量I对时间的导数(绝对导数),等于该矢量在动坐标系中对时间的导数(相对导数),加上动坐标系的转动角速度与这一矢量的矢积。选取动坐标系为弹体坐标系OX1Y1Z1,取任意矢量I为弹体坐标系相对于发射惯性坐标系的平移位移速度矢量V(绝对速度),则可得到:
(1)

1.2 滚转角的估算算法
忽略弹体角速度ω1的影响,将弹体系下加速度矢量投影到惯性坐标系下,有如下公式:

(2)
Ay-g0y=sinφcosψ·Ax1+(cosφcosγ+sinφsinψsinγ)·Ay1+(-cosφsinγ+sinφsinψcosγ)·Az1
Az-g0z=-sinψ·Ax1+cosψsinγ·Ay1+cosψcosγ·Az1
Ay-g0y-sinφcosψ·Ax1=sinγ·(sinφsinψAy1-cosφAz1)+cosγ·(cosφAy1+sinφsinψAz1)
Az-g0z+sinψ·Ax1=sinγ·cosψAy1+cosγ·cosψAz1
(3)

γ估计=atan2(sinγ,cosγ)
其中:φ,ψ为弹体的俯仰和偏航姿态角,可利用接收机计算的弹道倾角代替,即φ≈θ;ψ≈σ。γ为需要计算得到的滚转角;g0x,g0y,g0z为重力加速度在惯性系下的3个分量;Ax1,Ay1,Az1为弹体系下的3个视加速度,可通过弹上惯组敏感信息直接获取;Ax,Ay,Az为3个惯性系下的加速度,可通过接收机敏感的速度信息进行微分提取后转换到发射惯性系获得。在此过程中微分提取器的设计需考虑接收机刷新率、定位精度和弹体截止频率等信息,其设计非本文重点,在此不再论述。
为避免GPS接收机失锁或者横法向过载突然减小引起大的计算偏差,设计最小二乘滤波器滚动平滑计算结果:

(4)
其中,τ0为最小二程滤波时间;n为滤波器输入数据组数;A1,A2,φ1,φ2为递推计算中求得的滤波器参数。
1.3 影响估算精度因素分析
由式(3)右边部分描述可见,当弹体系下横向过载较小,即同时满足Ay1和Az1接近0时,则方程右边sinγ及cosγ的系数均接近为0,此时理论上无法准确计算出准确的滚转角。除此之外,接收机测速噪声增大会影响Ax,Ay,Az的精度;三通道角速度增大导致式(2)中省略的ω1×V项估算精度降低。若将横法向过载Ay1和Az1当作有效信号源,将接收机测速噪声和弹体扰动角速度ω1当作噪声源,为提高滚转角计算精度,需要尽量提高滚转角计算的“信噪比”。
2 过载控制辅助估算滚转角实现方案
为有效提高估算滚转角的“信噪比”,需提高横向过载,降低GPS接收机测量噪声和弹体角速度。制导炮弹发射后常伴随三通道强扰动,滚转通道甚至存在几十赫兹的旋转,这样的动态特性直接影响GPS接收机和加表的测试精度;同时炮弹的强静稳零攻角飞行的特性使得发射后横向过载较小,最终导致滚转角估算效果差。为提高算法适应性和滚转角估算的精度,采用过载控制辅助实现滚转角的求取,实现方案如下:
滚转通道利用惯组敏感的角速度信息,通过控制器对滚转通道进行消旋处理,在角速度降下来后通过纯积分控制器让滚转姿态尽量保持,减小ωx1值,控制框图如图1所示:
图1 滚转通道回路控制示意图
采用角速率控制策略减小俯仰和偏航通道抖动,但考虑到滚转角计算过程中对横法向过载有一定要求,在角速率反馈回路上增加一个过载反馈回路,如图2所示:
图2 横向通道回路控制示意图

3 仿真验证
为真实反应接收机定位误差对滚转角计算精度的影响,仿真验证采用真实的GPS接收机开展,其系统组成如图3所示:
图3 试验系统框图
仿真计算机根据舵机模型的摆角大小实时计算弹体六自由度模型信息,并将转换到WGS84坐标系下的速度和位置信息送往GPS模拟器,产生对应弹道的卫星信号,供GPS接收机定位使用;同时仿真软件将解算的视速度增量和角增量信息通过等效惯组接口送往控制计算机,供控制软件进行导航计算,控制计算机根据惯组接口信息和GPS接收机信息进行控制计算,输出控制指令到舵机模型,计算控制摆角,最终由仿真软件读取舵机模型摆角值,形成闭环系统。
仿真结果如下图所示:

图4 GPS定位速度信息
图5 横向过载控制指令及反馈

图6 滚转角估算效果示意图
图4为仿真过程中GPS接收机在发射惯性系3个方向上的定速信息。在仿真过程中,GPS接收机定位的速度信息连续无跳点,速度的变化趋势稳定;图5为过载跟踪曲线,Nz1为惯组敏感的弹体法向过载、Nz1cx为加入的指令过载。弹体过载Nz1在20s~30s达到约0.2g,在此时间段通过本方案估算得到的滚转角Gam_Gps与仿真模型中真实的滚转角Gam_Model的一致性较好,能够准确解算出当前时刻的飞行滚转角。
考虑加表误差项和风干扰(含随机风和平稳风)等单项误差后,滚转角精度统计结果如表1所示:
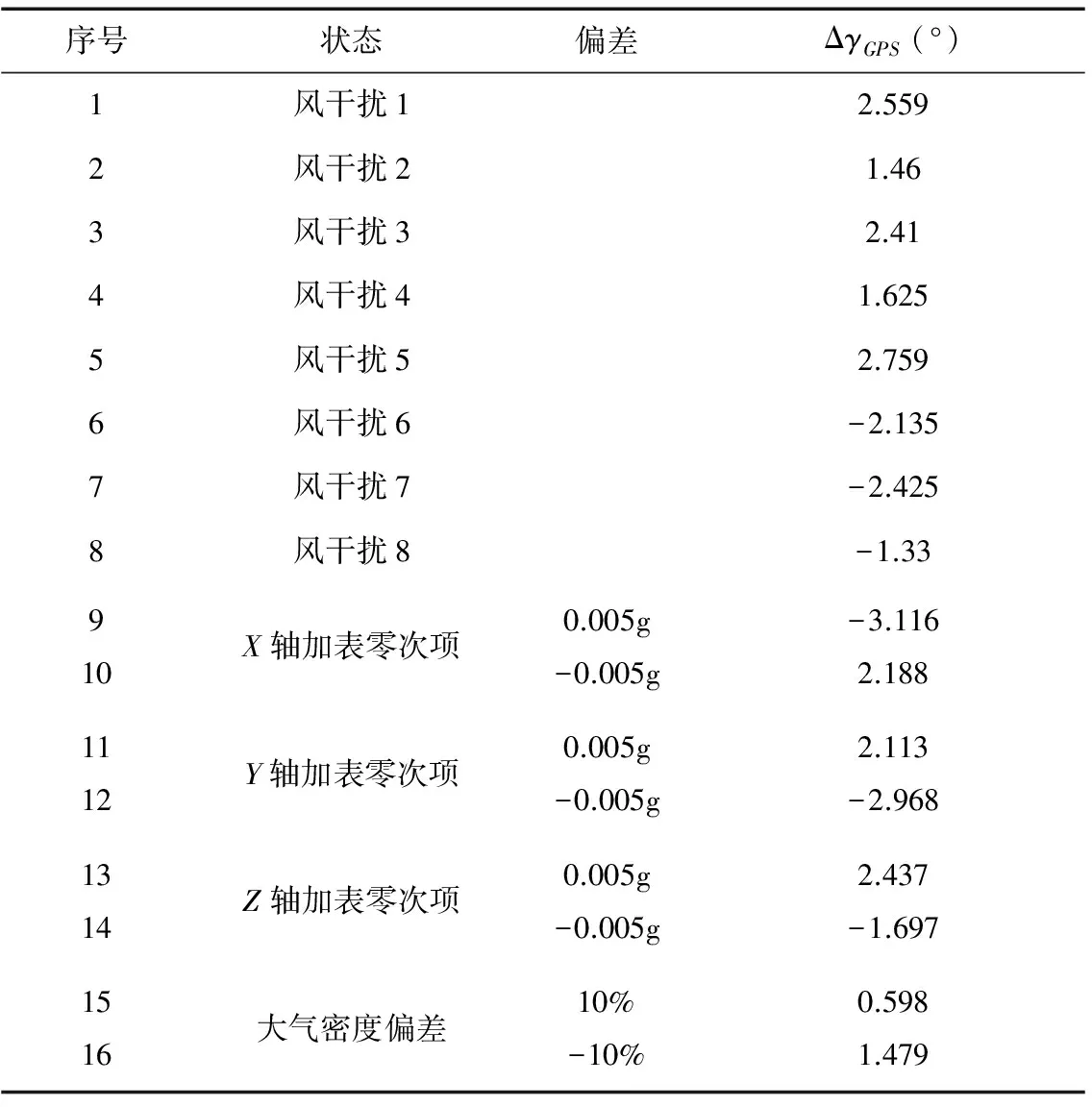
表1 单项偏差注入后的滚转角估算精度
由表1可见,本方案获取的滚转角精度能够满足使用需求。
将本方案与利用陀螺信息估算滚转角[4]方案进行比较:

图7 空中对准时刻角速度曲线

图8 2种方案估算滚转角的比对图
4 结束语
采用GPS接收机定速信息和惯组的加表信息求取空中滚转角,其输入信息源受发射过载影响小,规避了空中对准对陀螺信息的依赖,估算精度对弹道形状和控制品质不敏感;同时无论是GPS信息还是加表信息,其误差均不随时间累积,滚转角求取过程中不受切变风影响,环境适应性更强;该方法实现简单可靠,工程应用性强,能够满足制导炮弹空中对准精度的要求。
参 考 文 献
[1] 苟秋雄.基于磁阻传感器的末制导迫击炮弹滚转姿态初始对准技术研究[J]. 弹箭与制导学报, 2008,28(3):45-48. (Gou Qiuxiong . Research of Terminal-guide Mortar Bomb Roller Attitude Initial Alignment Technique Based on Magneric Resistance Sensor[J]. Journal of Projetiles,Rocket,Missiles and Guidance, 2008,28(3):45-48.)
[2] 高峰,张合.基于基准角和补偿角的常规弹药滚转角磁探测算法研究[J]. 探测与控制学报,2008,30(5): 11-15.(Gao Feng, Zhang He, Algorithm of Roll Angle Determination of Conventional Ammunitions Based on Benchmark Angle and Compensation Angle[J].Journal of Detection&Control, 2008, 30(5): 11-15.)
[3] 曹红松.地磁陀螺组合弹药姿态探测技术研究[J].弹箭与制导学报,2006,26(3):142-145.(Cao Hongsong. Researching Ammunition Attitude Detect Technique Combination of Geomagnetism and Gyro[J].Journal of Projetiles, Rocket, Missiles and Guidance, 2006, 26(3): 142-145.)
[4] 佘浩平. GPS/INS 组合制导弹药空中对准的初始滚转角估计新算法, 兵工学报, 2011,32(10): 1263-1270. (She Haoping. New Algorithms to Estimate Initial Roll Angle for In-flight Alignment of GPS/INS Guided Munitions[J].Acta Armamentarii, 2011,32(10): 1263-1270.)
[5] 钱杏芳, 林瑞雄, 赵亚男.导弹飞行力学[M].北京理工大学出版社,2000.
