空间摆动RCCC机构动力学分析
2018-05-16侍威赵国平王春明王华坤
侍威, 赵国平, 王春明, 王华坤
(北京精密机电控制设备研究所研发中心,北京 100076)
0 引言
RCCC机构[1-8]作空间运动的基本构型,能够实现给定空间位置输出,与自由度的机器人机构相比,具有稳定性好、可靠性高、节省成本等优势,成为研究的重点方向。目前国内外学者主要针对RCCC机构位姿、运动精度与可靠性等方向[9-15]开展研究,基本没有开展RCCC机构构型与特性研究。
本文将RCCC空间机构进行演化,实现转动到摆动运动转换,提出空间摆动RCCC机构,为伺服电动舵机提供满足空间输出需求的新机构,在此基础上,针对空间摆动RCCC机构开展动力学分析,找出空间摆动RCCC机构各构件受力特点,为空间摆动机构的优化设计奠定了基础。
1 空间摆动RCCC机构演化
将典型的RCCC机构(如图1)进行参数设置(令h1=h2=h3=h0=0,s1=s2=s3=s0=0,轴间夹角α12=α23=α30=90°,α01为预设值,20°),推导出空间摆动RCCC机构(如图2),该机构可实现摆杆输出与旋转输出两种输出形式,满足多构型输出的需求。

图1 典型的RCCC机构
2 空间摆动RCCC机构动力学分析

图2 空间摆动RCCC机构构型图

图3 空间摆动RCCC机构运动分析坐标系
建立空间摆动RCCC机构运动分析坐标系如图3所示,图3中摆杆1绕Z轴旋转,作为输出,曲柄4作为输入。O-xyz是原点为O的固定坐标系。O-x″y″z″为连杆(叉子)的固连坐标系。O-x′y′z′的z′与z重合,x′与x″重合。图3(a)表示摆杆1处于中间位置,图3(b)表示曲柄4转过α角及摆杆摆过β角的位置姿态。
空间摆动RCCC机构中摆杆1和销轴2为定轴转动,连杆3为定点运动,曲柄4为定轴转动。现假设曲柄为匀速定轴转动。

1)将摆杆和销看做一个示力体,其受力情况如图4所示。

图4 摆杆和销轴受力图
列出动力学方程如下:
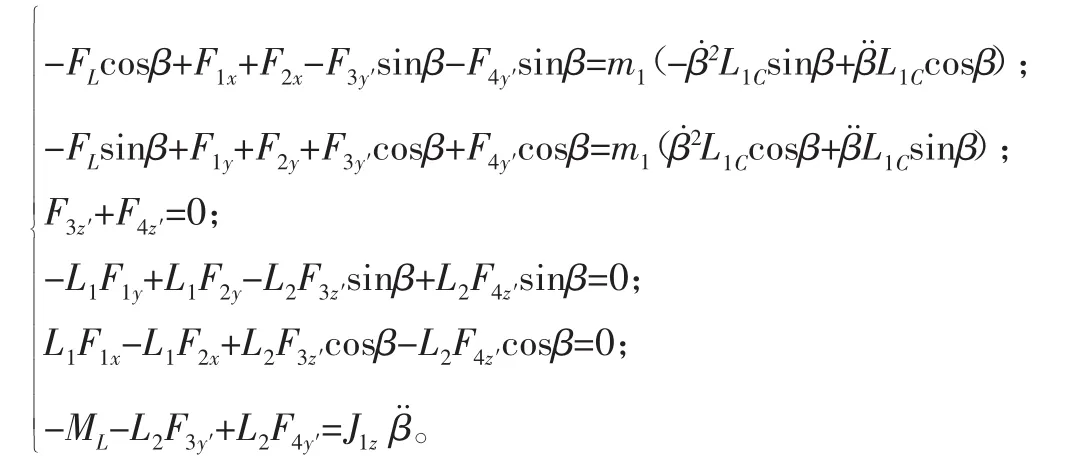
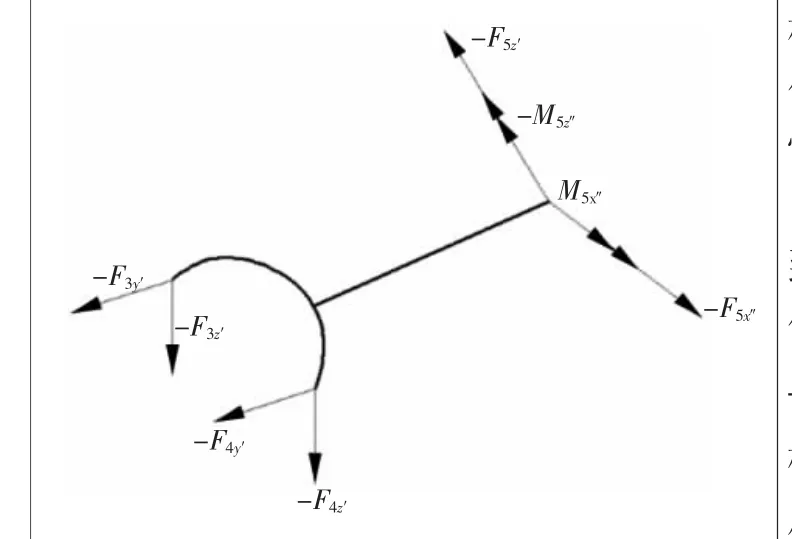
图5 连杆受力图
2)将连杆作为示力体,其受力情况如图5。
连杆受到销对它的作用力-F3、-F4,以及曲柄对它的作用力F5和力矩M5。-F3、-F4和这两个力对O之矩在O-x′y′z′中表示为:
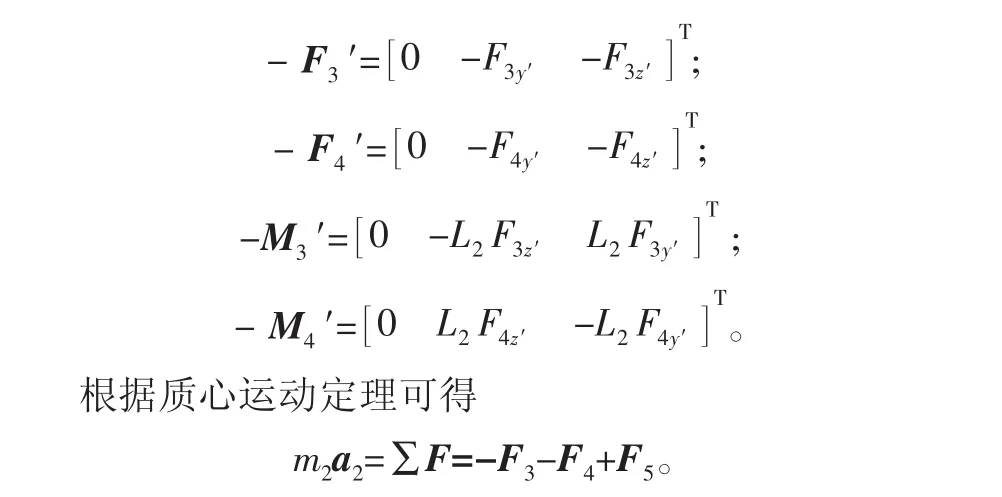
由于O-x″y″z″是连杆的惯量主轴系,所以根据刚体绕定点转动欧拉动力学方程可得:

其中,A、B、C分别指连杆对x″、y″、z″的转动惯量。
从O-x′y′z′到连杆固连坐标系O-x″y″z″与固定坐标系O-xyz的坐标变换矩阵分别为:

设连杆质心到O的距离为L2C,则连杆质心可以表示为


3)把曲柄作为受力体,其受力情况如图6。

图6 曲柄受力图
曲柄质心加速度为

其中L3C为曲柄质心到回转轴线的距离。建立曲柄的动力学方程组如下:


3 实例分析
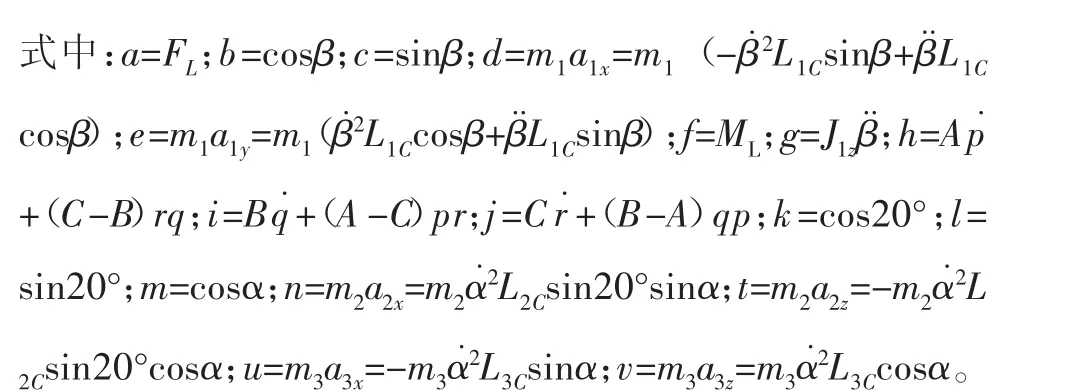
设曲柄转速为75 r/min匀速输入,求得α˙=2.5πrad/s,L1=0.024 m,L2=0.017 m,L3=0.034 m,m1=1.1836 kg,m2=0.18926 kg,m3=0.52426 kg,J1z=2.3803×10-2kg·m2,ML=500 N·m,FL=500/0.3=1666.7 N,A=1.1056×10-4kg·m2,B=3.8229×10-5kg·m2C=1.2729×10-4kg·m2。将数据代入方程组,求得各处的反力与反力矩如图7~图14所示。
由图可见,销轴受连杆的作用力较大,峰值力达到15 600 N,且两端支撑受力一致;曲柄对连杆作用力比较小,峰值低于0.073 N,波动幅值低于0.01 N,曲柄对连杆的转矩相对较大,峰值达到532 N·m,波动幅值为33 N·m;壳体对曲柄的作用力最小,峰值低于0.0252 N,但对其转矩值达到501.35 N·m,其波动周期为其他受力周期的2倍。
4 结论

图7 摆杆受壳体的力F1-t变化曲
1)基于典型RCCC机构进行演化,得到紧凑型舵机用空间摆动RCCC机构,可实现摆动输出、旋转输出两种输出形式。2)通过空间摆动RCCC机构动力学分析,得出机构各构件之间的相互作用力大小与趋势,从而为空间摆动RCCC机构的结构设计提供理论依据。
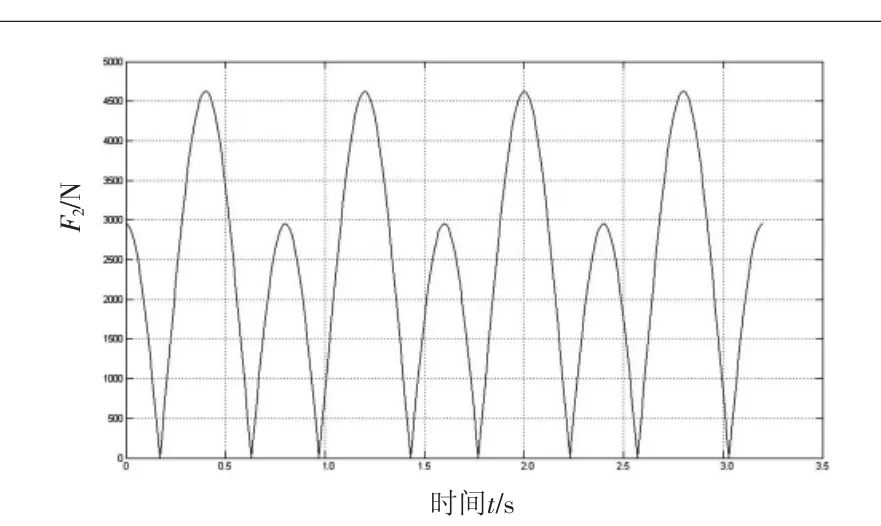
图8 摆杆受壳体的力F2-t变化曲线
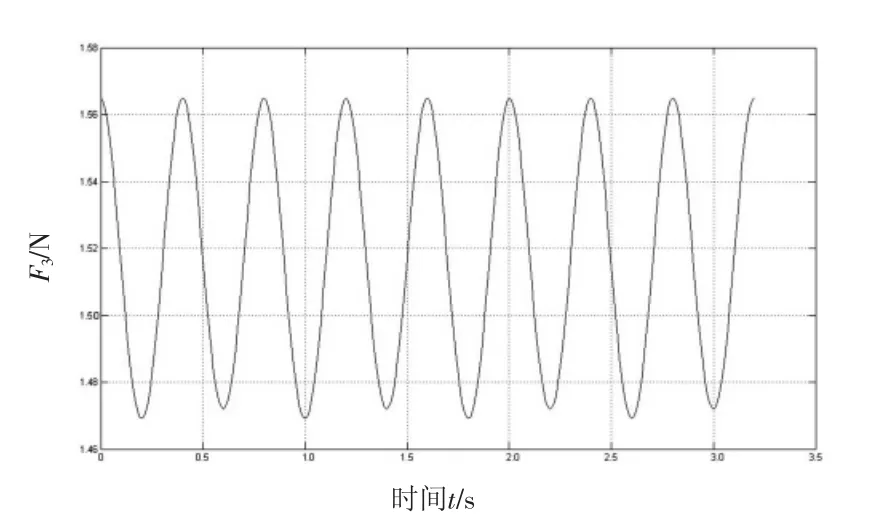
图9 销轴受连杆的力F3-t变化曲线

图10 销轴受连杆的力F4-t变化曲线
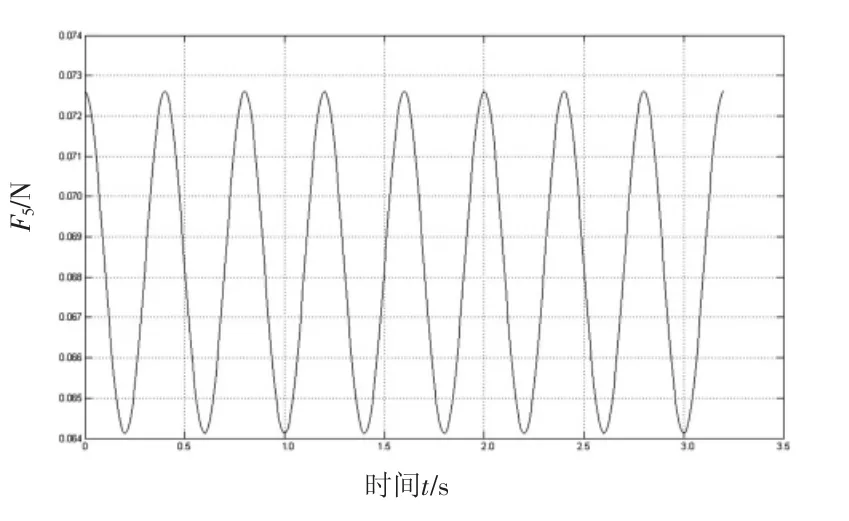
图11 曲柄对连杆的力F5-t变化曲线
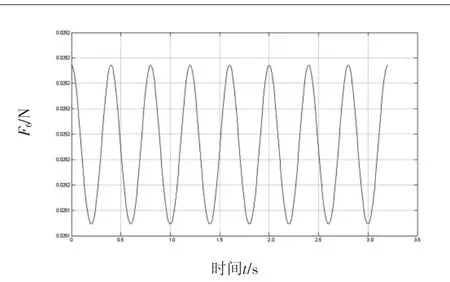
图12 壳体对曲柄的力F6-t变化曲线

图13 曲柄对连杆的力矩M5-t变化曲线

图14 壳体对曲柄的力矩M6-t变化曲线
[参考文献]
[1] 奥博连斯基,叶尔马科夫,苏霍鲁科夫.航空舵机系统设计理论[M].北京.航空工业出版社,2013.
[2] 张佑忠.简化快速电动舵机方案[J]航天控制,1985(1):48-53.
[3] 沈引中.大功率机电舵机设计研究[D].南京:南京航空航天大学,2012.
[4] 余波.飞行器舵机传动机构设计与性能分析[D].重庆:重庆大学,2014.
[5] 陆红.飞行器电动舵机系统的设计与实现[D].哈尔滨:哈尔滨工程大学,2012.
[6] 从强.空间机构技术发展趋势及展望[J].载人航天,2016(22):1-8.
[7] 杨维垣.空间机构分类及可靠性研究[J].航天器工程,1994(3):31-39.
[8] 王文魁.空间机构运动行为模拟概念研究[J].载人航天,2013(19):59-66.
[9] 褚金奎,孙建伟.RCCC机构轨迹综合的数值图谱法[J].中国机械工程,2009(20):1024-1028.
[10] 孙建伟,路贺,褚金奎.基于傅里叶级数的RCCC机构运动综合[J].中国机械工程,2014(21):2841-2847.
[11] 刘平,陈思专,张佩文.空间RCCC机构三维位形动态模拟[J].机械设计,2005(8):60-62.
[12] 史天录,邓洪洲,冯元生.RCCC空间机构的运动精度和可靠性分析[J].机械科学与技术,1995(1):47-51.
[13]黄胜兴.用线性方程组作空间机构的速度和加速度分析[J].武汉工学院学报,1998(2):53-67.
[14] 曹阳.基于解域的四位置空间RCCC机构综合[J].农业机械学报,2016(8):399-405.
[15] 孙建伟.利用数值图谱法进行RCCC机构的函数综合[J].中国机械工程,2008(6):713-717.
