外骨骼助行机器人变刚度驱动的研究进展
2018-05-16陈勇吴维朱希伟康乾李荣华张连东
陈勇, 吴维, 朱希伟, 康乾, 李荣华, 张连东
(大连交通大学机械工程学院,辽宁大连 116028)
0 引 言
外骨骼助行机器人穿戴在老年人的腿上,充当人体的外骨骼,帮助老年人重新站立和行走,促进血液循环,防止肌肉萎缩,减少并发症的发生,恢复运动能力和生活能力,重新回归社会,满足老年人的迫切需求。
目前,外骨骼助行机器人的驱动方式主要包括电机驱动[1-3]、液压驱动[4-6]、气压驱动[7-9]。电机驱动比较笨重,体积较大,影响了外骨骼助行机器人的轻便性和灵活性。液压驱动的响应速度较慢,精度较低,结构复杂,制造和维护的成本较高,而且密封性不好,容易导致油液泄漏,能量利用率较低,容易造成能量浪费。气压驱动的信号传递速度较慢,运动稳定性较差。当穿戴者行走在复杂路面需要改变运动状态时,穿戴者肌肉的收缩和伸展会引起穿戴部位的变形,传统的刚性驱动不能使外骨骼助行机器人跟随穿戴者改变运动状态,限制了穿戴者的柔性运动[10]。外骨骼助行机器人的运动与穿戴者下肢的动作差别很大,导致步态僵硬,难以协调穿戴者与外骨骼助行机器人在复杂地形的动作灵活性、运动稳定性和环境适应性,容易引起位姿误差,不仅不能达到助行的效果,而且很有可能会使外骨骼助行机器人成为穿戴者的一种负担。
外骨骼助行机器人的变刚度驱动,可以根据外部环境的变化来调节刚度,使得外骨骼助行机器人能够实时进行姿态调整,保证外骨骼助行机器人跟随穿戴者一起改变运动状态,从而使人机的耦合运动更加协调[11-12]。1 弹性元件的变刚度驱动
1.1 平衡位置的变刚度驱动
刘伟颖等[13]在下肢外骨骼机器人的设计中,采用了串联弹性驱动,参考体、杠杆臂和旋转体绕轴旋转,参考体固定不动,如图1所示,杠杆臂的末端与旋转体的固定点用绳的一端连接弹簧,绳的另一端连接电机,通过电机实时调整杠杆臂来改变旋转体的平衡位置,控制下肢外骨骼机器人的刚度变化,获得较好的力学性能,提高耐冲击性,降低阻抗,减少弹簧系统的共振。
何福本等[14]基于串联弹性驱动,根据人体肌肉-肌腱的特性,设计了一种下肢外骨骼机器人的弹性驱动,模仿肌肉的收缩功能,利用牵引力对下肢外骨骼机器人的关节进行弹性驱动,如图2所示。拉伸弹簧Sa和Sb产生拉力Fa和Fb,Fa和Fb可以模仿人体肌肉-关节的伸肌和屈肌作用,在编码器1和编码器2的共同作用下,利用串联弹性驱动模仿人体肌肉-肌腱的收缩功能,使下肢外骨骼机器人的关节运动符合人体关节的运动特点,产生柔顺化的运动效果。

图1 串联弹性驱动的结构示意图

图2 仿肌弹性驱动的结构示意图
1.2 结构可控的变刚度驱动
马挺等[15]设计了一种结构可控的柔性变刚度驱动,通过改变弹簧的转动惯量和有效杆长,控制外骨骼机器人的刚度变化,如图3所示。相对于传统的刚性驱动,这种结构可控的柔性变刚度驱动让驱动功率降低了31%,能耗减少了21%,解决了刚性驱动的主要缺点。
2 杠杆结构的变刚度驱动
现有的杠杆结构变刚度驱动有4种,如图4所示[16]。
在图4(a)中,有效力臂为L,通过改变L来控制刚度变化,L增大则刚度增大,L减小则刚度减小。在图4(b)中,支点与弹簧的距离为L1,支点与外力F的距离为L2,通过改变L1/L2来控制刚度变化:L1减小,L2增大,则L1/L2减小,刚度减小;L1增大,L2减小,则L1/L2增大,刚度增大。在图4(c)中,有效力臂为L,通过改变L来控制刚度变化,L增大则刚度减小,L减小则刚度增大。在图4(d)中,采用齿轮齿条机构改变有效力臂,从而控制刚度变化,当齿圈转动的同时,行星架自转,带动齿条移动,齿条移动带动弹簧滑块移动,有效力臂改变,刚度改变。

图3 结构可控柔性驱动的结构示意图
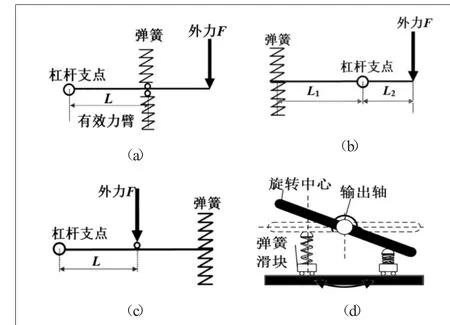
图4 杠杆结构变刚度驱动的原理图
B.S.Kim等[17]设计了板簧结构的变刚度驱动,如图5所示,板簧连接在中心轴上,电机1和电机2通过曲柄滑块机构共同控制力臂长度,曲柄正向旋转时,刚度不变,曲柄反向旋转时,移动支点在板簧上移动,刚度改变。
郭龙等[18]利用杠杆结构,设计了一种旋转型变刚度驱动,如图6所示,底座为输入端,转动体为输出端,在底座输入旋转运动,通过弹簧片到达输出端,使输入端和输出端发生相对转动,滚轮纵向移动,使支撑点的位置发生改变。在输入端和输出端相对转角一致的情况下,系统所需转矩不同,扭转刚度也不同,通过改变滚轮的位置,改变输入端和输出端的扭转刚度。
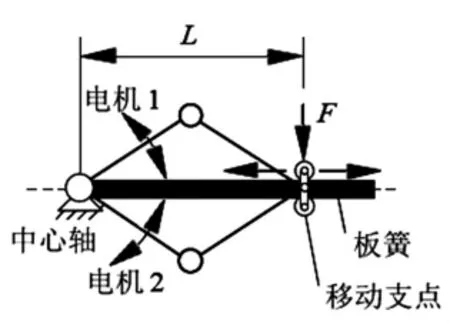
图5 板簧结构变刚度驱动的结构示意图
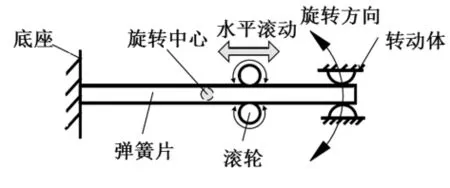
图6 旋转型变刚度驱动的结构示意图
王伟等[19]设计了一种柔性齿条变刚度驱动,如图7所示,电机带动齿轮在柔性齿条上滚动,改变齿轮施加给柔性齿条的作用力,使柔性齿条发生不同程度的变形来改变刚度,扭转刚度范围为196.55~574.22 N·m/rad,响应时间为2 s。
3 挠性结构的变刚度驱动
王俊等[20]采用绳索驱动方式,设计了一种挠性结构的变刚度驱动,如图8所示。根据人体下肢的结构型式和运动特点,设计了下肢外骨骼机器人的绳索驱动,由于不需要将驱动装置安装在关节处,从而使结构更加紧凑。通过缠绕在髋关节、大腿绑定转动副、膝关节、小腿绑定转动副上的绳索,对下肢外骨骼机器人进行变刚度驱动,使大腿连杆和小腿连杆摆动协调,产生柔顺化的运动效果。
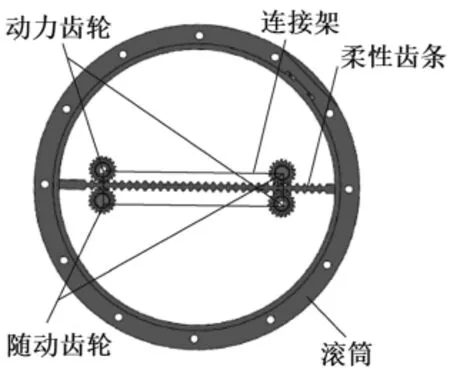
图7 柔性齿条变刚度驱动的结构示意图
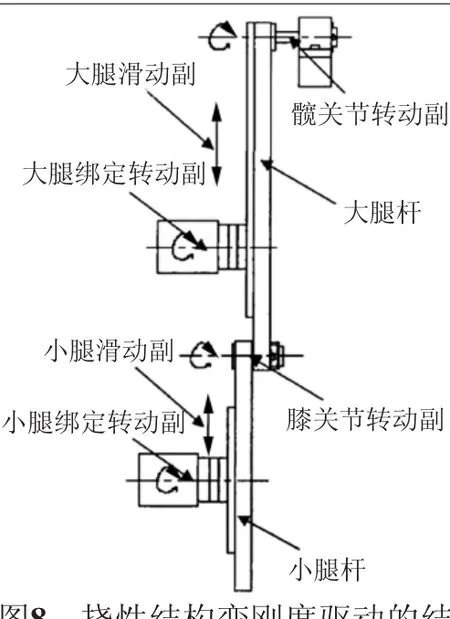
图8 挠性结构变刚度驱动的结构示意图
4 变刚度驱动的发展趋势与展望
在国内外学者的以往研究中,外骨骼助行机器人的变刚度驱动各有特色,但是许多关键科学问题仍未解决,需要进一步深入研究。
1)目前的外骨骼助行机器人变刚度驱动虽然多种多样,但是同质化现象严重,模仿性的跟踪研究较多,缺乏独特的自主创新。
2)外骨骼助行机器人关节之间没有良好的变刚度驱动,在抬腿和落地的瞬间,腿部受到较大的冲击,影响外骨骼助行机器人的正常运动,很可能对穿戴者肢体造成二次伤害。
3)目前的外骨骼助行机器人变刚度驱动,没有涉及人体-机械-环境的改变,只能在实验条件下适合特定的个体,穿戴者与外骨骼助行机器人的运动协同性较差,引起严重的位姿误差,增加穿戴者的行走疲劳,不能适应外部环境的变化,没有很好的助行,有可能成为一种负担,制约了外骨骼助行机器人的应用。
这些关键科学问题如果不解决,就会制约外骨骼助行机器人的发展。
5 结语
外骨骼助行机器人的变刚度驱动是在仿生学、人体运动学、机构学、机器人学、人机工程学、信息科学和实验科学等多学科背景下进行的创新性设计,充分利用各学科交叉和融合产生的协同效应。近年来,虽然在外骨骼助行机器人的变刚度驱动方面取得了一些成果,但是大部分处于理论研究和试验测试阶段。随着科学技术的不断发展,融入一些新颖的仿生理念、设计准则、工作原理和系统构成,设计外骨骼助行机器人的变刚度驱动,提升外骨骼助行机器人的创新设计水平和实践应用能力,具有重要的科学意义和社会价值。
[参考文献]
[1] 宋遒志,王晓光,王鑫,等.多关节外骨骼助力机器人发展现状及关键技术分析[J].兵工学报,2016,37(1):172-185.
[2] MOONEY L M,HERR H M.Biomechanicalwalking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton [J].Journal of Neuroengineering&Rehabilitation,2016,13(1):1-12.
[3] 孙明艳,胡军,刘有海,等.穿戴式下肢外骨骼机器人的结构设计与仿真[J].机械,2016(1):43-48.
[4] GIORGIO C,DINO A,FABRIZIO S.A novel compact torsional spring for series elastic actuators for assistive wearable robots[J].Journal of Mechanical Design,2012,134:1-10.
[5] YAN T,CEMPINI M,ODDO C M.Review ofassistive strategies in powered lower-limb orthoses and exoskeletons[J].Robotics and Autonomous Systems,2015,64:120-136.
[6] MIAO Y J,GAO F,PAN D L.State classification and motion description for the lower extremity exoskeleton[J].Journal of Bionic Engineering,2014,11(2):249-258.
[7] SANZ-MERODIO D,CESTARI M,AREVALO J C,et al.Generation and controlofadaptive gaitsin lower-limb exoskeletons for motion assistance[J].Advanced Robotics,2014,28(5):329-338.
[8] LI Zhiqiang,XIE Hanxing,LI Weilin,et al.Proceeding of Human Exoskeleton Technology and Discussions on Future Research[J].Chinese Journal of Mechanical Engineering,2014,27(3):437-447.
[9] YANG G Z,BELLINGHAM J,CHOSET H.Science for robotics and robotics for science[J].Science Robotics,2016,1(1):1-2.
[10] 孙明艳,胡军,刘有海.穿戴式下肢外骨骼机器人的结构设计与仿真[J].机械,2016,43(1):43-48.
[11] 陈勇,李荣华,张连东.外骨骼助行机器人的人机耦合运动特性[J].现代机械,2016(2):1-4.
[12] 陈勇,宋雪萍,李荣华.老年人外骨骼机器人斜坡行走的运动学分析[J].机械,2016,43(1):36-39.
[13] 刘伟颖.助行腿串联弹性驱动器的系统设计[D].哈尔滨:哈尔滨工业大学,2014.
[14] 何福本,梁延德,孙捷夫.基于SEA的机器人仿肌弹性驱动关节研究[J].中国机械工程,2014,25(7):900-905.
[15]马挺,郭险峰.外骨骼机器人柔性变刚度驱动器设计[J].科技资讯,2014(35):65-66.
[16]JAFARI A,TSAGARAKIS N,CALDWELL D.Energy efficient actuators with adjustable stiffness:a review on AwAS,AwAS-II and CompACT VSA changing stiffness based on lever mechanism[J].Industrial Robot,2015,42(3):242-251.
[17]KIM B S,SONG J B.Hybrid dual actuator unit:A design of a variable stiffness actuator based on an adjustable moment arm mechanism[C]//IEEE International Conference on Robotics and Automation.IEEE.2010:1655-1660.
[18]郭龙.机器人可变刚度柔性关节设计分析与试验研究[D].武汉:武汉科技大学,2015.
[19] 王伟,刘立冬,魏来.柔性齿条式变刚度关节驱动器设计与研究[J].机械工程学报,2016,52(1):26-33.
[20]王俊.变刚度绳驱动关节模块研究[D].北京:中国科学院大学,2016.
