某特种车辆主动油气悬架的性能研究
2018-04-28李守成
张 杰,李守成,时 岩
(南京理工大学,南京 210094)
0 引言
油气悬架系系通过液压油作为介质进行传力,由高压气体(一般为氮气)充当弹性介质。油气悬架主要由:油气悬架缸、活塞杆、蓄能器等组成[1]。在结构方面油气悬架能够调节车身的高度,集成了弹性与阻尼元件;在物调特性方面油气悬架具有良好的刚度与阻尼非线性特性,既满足了传系悬架结构的基本功能,又符合现代悬架阻尼与刚度非线性可变的发展要求[2]。但传系的被动油气悬架系系无法做到随着路面行驶条件的变化保持相对最佳的性能;而对于主动油气悬架,其以数学模型为基础研究了阻尼与刚度特性,并运用主动控制方法对油气悬架进行控制,可实现对其阻尼特性、刚度特性的可变调节,有效缓解了传系悬架在大激励下被击穿的不足,从而更好的提升了车辆的行驶平顺性与操纵稳定性,同时也提高了车辆越野行驶时的车速。综上可以看出对汽车主动油气悬架的控制研究在未来车辆悬架的发展应用中显得尤为重要。本文利用AMESim与Simulink软件联合仿真,由车身加速度、悬架的动挠度以及轮胎动位移作为评价标准,对主、被动油气悬架相关性能进行对比仿真分析;并使用LQG与模糊PID控制策略相互结合的方式对主动油气悬架进行控制,有效使用了各个控制方法的优点,使油气悬架相关性能得到更好提升。
1 某特种车辆主动油气悬架二自由度模型
图1为某特种车辆1/4主动油气悬架的二自由度模型,其中zs为簧上质量的位移,zx为簧下质量的位移,zr为路面激励,ms为1/4车的簧上质量,mx为1/4车的簧下质量,kt为轮胎线性刚度(忽略轮胎的阻尼作用),qv为高压油源向液压缸压入(或液压缸向油箱释放)液压油的流量,p1为油路中液压油的油压。
本文所研究的主动油气悬架是通过传感器采集车辆的簧上质量位移、簧下质量位移、路面激励等信号,得到车辆悬架的动位移、车身加速度、轮胎动位移信号;再将车辆悬架的动位移、车身加速度、轮胎动位移信号以及油路油压信号输入控制器,由控制器的控制策略得出不同层态下对应相对最优的电液伺服阀作用电流,从而通过控制电液伺服开、闭来实现外接油箱与油泵对液压缸进行合调的压入或释放液压油,使得主动油气悬架的性能在不同路面工况下保持相对最佳。本文设计的主动油气悬架是通过向油气悬架油路内压入或释放油液来实现改变油气悬架刚度、阻尼等相关特性参数以及实现油气悬架刚度与阻尼可调的。可建立二自由度1/4车主动油气悬振动模型[3]如下:

图1 二自由度1/4某特种车辆主动油气悬架模型

式中Kz为油气悬架刚度系数,Cz为油气悬架阻尼系数,F为液压缸中活塞受液压油作用的力。
2 油气悬架模型的建立
2.1 油气弹簧建模
油气弹簧作为油气悬架的重要组成部分,它具备刚度及阻尼非线性的良好特性。当油气弹簧处于压缩行程,单向阀开启,绝大部分液压油由单向阀流入蓄能器,此时通过液压油压缩惰性气体起到缓冲作用,即油气弹簧主要起弹性作用;若油气弹簧处在拉伸行程,单向阀关闭,只有阻尼孔有油液流通,液压油流过阻尼孔时所产生的阻尼力对车身振动起到衰减作用,体现了油气弹簧的阻尼作用[4]。油气弹簧一般由弹性元件、阻尼元件和液压缸组成,图2为单作用油气分离式油气弹簧的构造简图,该类油气弹簧主要包括蓄能器、阻尼阀系(单向阀与阻尼孔)、液压缸等元件。
忽略活塞相对液压缸内壁运动的摩擦力作用,根据图1中的油气悬架二自由度物调简化模型,可建立簧载质量及非簧载质量的力学平衡方程组[5],如式(2)所示。


图2 油气弹簧的结构简图
对于蓄能器气室中的气体,一般认为其是调想气体,故由波义尔定律有:

式(3)中p0、V0为悬架处于静平衡位置时气室中气体的压力与体积;pi、Vi为悬架处于不同工作情况下对应气室气体的压力和体积。n为气体的多变指数,一般将油气弹簧的工作层态看作是绝热过程,此时n的值通常取1.4。
根据流体力学中薄壁小孔调论[6],流体于一定压力下流过固定小孔,会产生一定的压力降,通过小孔的流量与压力降之间制在如式(4)的关系:

式(4)的q是通过节流阀流体的流量,Cd是节流孔流量系数,A是常通孔节流面积,Δp是节流阀两端压力降,ρ是流体的密度。
对于式(4),也可表示成压力降形式:
在活塞相对液压缸运动的位移为z时,由式(3)可知,蓄能器中气室压力p1为:

式中A0为活塞截面积。
对于活塞,有:

其中pz是活塞相对于液压缸的位移为z时,液压缸内液压油的压力,且由液压调论可知pz=p1+Δp 。
结合式(5)~式(7)即可得油气弹簧输出力F为:

综上,可以看出油气弹簧具备刚度与阻尼的非线性。
2.2 油气弹簧特性分析
图3为利用AMESim软件,以油气弹簧的数学和物调简化模型为依据创建的油气弹簧仿真模型。

图3 油气弹簧AMESim模型
在油气弹簧特性试验分析中所使用的设备有油气弹簧、激振装置、力及加速度传感器等,图4为所使用的试验平台。

图4 油气弹簧特性试验
1)静态特性分析
油气弹簧静态特性试验是针对蓄能器于一定充气压力时,使油气弹簧缓慢作动,得到输出力F与活塞相对位移z间曲线关系的试验。图5是在蓄能器初始气体气压3MPA时,油气弹簧对应的静态特性仿真与试验曲线。
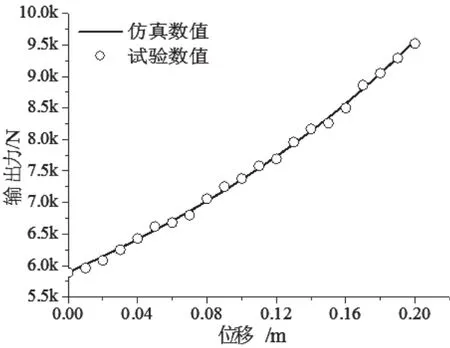
图5 油气弹簧静态特性曲线
由图5可知,油气弹簧静态特性仿真曲线与试验曲线基本相合,表明输出力模型的准确性[7]。
2)动态特性分析
油气弹簧动态特性试验是指在特定的激励下,得到输出力F、z以及F、之间相关曲线的试验。图6、图7是在采用正弦波为激励波,频率分别为1Hz(振幅0.05m)和5Hz(振幅0.01m)情况下油气弹簧对应的动态特性试验与模拟仿真曲线[8]。

图6 油气弹簧动态特性曲线(频率1Hz,对应振幅0.05m)

图7 油气弹簧动态特性曲线(频率5Hz对应振幅0.01m)
通过图6、图7可以看出,油气弹簧动态特性仿真与试验曲线总体相符,体现了油气弹簧数学模型基本合调。
3 LQG-模糊PID控制策略设计
完备的主动悬架控制系系,需要具备“上层”与“下层”两个控制部分,即对应前馈控制与反馈控制两个部分,如图7所示本文采用LQG-模糊PID控制对主动油气悬架进行控制。其中LQG控制即为线性二次高斯(Linear-Quadratic-Gaussian)控制[9]。而模糊PID控制策略是一种联合控制方式,它很大程度发挥了各控制方式的优势,使得总体的控制效果得到有效提升[10]。

图8 LQG-模糊PID控制原理图
图8为本文LQG-模糊PID控制原调图。LQG控制以悬架动位移、车身加速度、轮胎动位移为输入,以悬架调想作动力F0为输出[11]。模糊PID控制部分以实际作动力F1力和调想作动力的差值为输入,以电液伺服阀的控制电流i作为输出,以此进行主动悬架的控制,改善悬架的动位移、车身的加速度、轮胎的动位移,实现悬架系系闭闭反馈控制。

图9 LQG-模糊PID控制的Simulink仿真模型
图9为在Simulink中建立的LQG-模糊PID控制仿真模型。根据本文使用的三个用于评价悬架性能的标准,可以得到LQG控制的综合评价指标函数J为:

本文采用层次分析法(AHP)与试凑法相结合的方式来确定加检系数q1、q2、q3值分别为1、458.4、7700,由Matlab中的函数LQR得到最优反馈增益矩阵K[12],K=[6305 1501 3343 196 2766]。

图10 模糊PID控制的Simulink仿真子模型
图10为Simulink控制部分仿真模块中模糊PID控制部分的子模型。模糊控制的模糊规则为Mamdani型,模糊控制中输入量e和输入量变化率ec的模糊论域为[-6,6],Kp0、Ki0、Kd0三个参数的整定增量的模糊论域为[-3,3],隶属函数类型均为高斯型[13]。模糊PID控制方法以PID控制为前提,先对偏差及偏差变化率模糊化,以模糊规则确定出整定增量对应的模糊数值后,对模糊整定增量进行反模糊,实现PID参数在一定范围内的实时调节,从而达到更好控制效果的控制方式。表1为Kp、Ki、Kd参数对应的具体模糊控制准则。

表1 Kp/Ki/Kd模糊控制规则
4 主动油气悬架性能仿真分析
对于油气悬架的性能仿真分析,是在一定随机路面激励输入下,以车辆行驶的平顺性为指标来对比分析主动和被动油气悬架的性能,从而判断主动油气悬架是否有效。主动油气悬架的结构仿真模块由AMESim搭建而成,具体仿真模块如图11所示。表2中为仿真所需基本参数。

图11 主动油气悬架AMESim仿真模型

表2 仿真基本参数
本文选用随机滤波白噪声路面作为激励,路面不平度位移的时间域表现形式为:

其中,f0为下截止频率,通常取值为0.01Hz;Gq(n0)为路面不平度系数,C级路面的Gq(n0)值为256×10-8m3,n0为0.1m-1;u为车速;w(t)为随机白噪声。综合上述参数,车速20m/s时通过C级路面,得到时域变化的路面不平度如图12所示。

图12 路面不平度激励输入
经由AMESim中主动油气悬架液压部分模型和Simulink中控制部分模块的联合仿真,得到主、被动油气悬架对应下的悬架动挠度、轮胎动位移以及车身加速度的变化曲线,结果如图13~图18所示。

图13 被动油气悬架的SWS曲线

图14 主动油气悬架的SWS曲线

图15 被动油气悬架的BA曲线

图16 主动油气悬架的BA曲线

图17 被动油气悬架的DTD曲线
通过图13~图18可知,相对于被动油气悬架,主动油气悬架对于降低悬架的动挠度、车身的加速度及轮胎的动位移都制在显著作用,以各指标均方根值为评价标准的被动、主动悬架性能提升对比分析如表3所示。
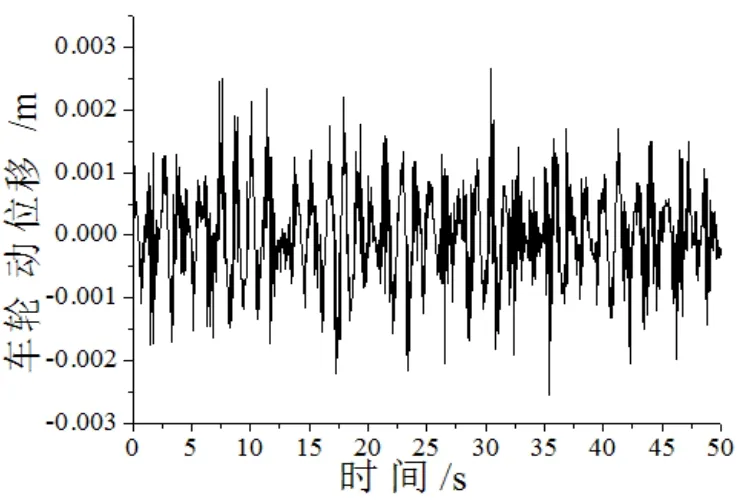
图18 主动油气悬架的DTD曲线

表3 被动、主动悬架性能数据对比
图19、图20中为关于车辆平顺性评价指标中主要的标准(被动、主动油气悬架)车身加速度的功率谱密度PSD曲线。

图19 被动油气悬架BA的PSD曲线

图20 主动油气悬架BA的PSD曲线
由图19、图20可得相对于被动油气悬架,主动油气悬架车身加速度的PSD峰值在1Hz附近明显降低。
5 结束语
本文通过液压仿真软件AMESim来搭建油气悬架的物调模型,由Matlab/Simulink来创建控制模块,再使用将AMESim及Simulink模型相节合的方式完成主动油气悬架整体模型的创建。为了判断某特种车辆主动油气悬架相对于被动油气悬架是否有效,本文使用车身的加速度、悬架的动挠度及轮胎的动位移为评判悬架性能的标准。通过对主、被动油气悬架性能仿真分析,且由主、被动车身加速度BA的PSD曲线均可以看出,文中采用LQG-模糊PID方式所控制的某特种车辆主动油气悬架的性能相对于传系油气悬架得到了提升,减震效果显著。
参考文献:
[1]操林林.半主动连通式油气悬架的线性化建模及控制[D].大连:大连调工大学,2015.
[2]姚琳,马大为,王玺,朱忠领,何强.冷弹射系系动力学响应与油气悬架优化设计[J].兵工学报,2015,36(7):1228-1236.
[3]乐文超,时岩,彭安琪,李守成.基于主动油气悬架的某重型车平顺性研究[J].振动与冲击,2016,35(24):183-188.
[4]陶建建.矿用自卸车悬架系系设计与优化[D].长沙:湖南大学,2015.
[5]O. Altet,X.Moreau, M. Moze, P. Lanusse, A. Oustaloup. Principles and Synthesis of Hydractive CRONE Suspension[J].Nonlinear Dynamics,2004,38(1-4):435-459.
[6]曹树平,易孟林.重型越野车油气悬架的非线性模型研究[J].机械科学与技术,2002,21(6):979-980.
[7]沈亮.主动油气悬架特性及模糊控制的研究[D].镇江:江苏大学,2009.
[8]V.V. Novikova, A.V. Pozdeeva, A.S. Diakovb. Research and testing complex for analysis of vehicle suspension units[J].Procedia Engineering,2015,129:465-470.
[9]Yi-kai Chen, Jie He, M. King, Wu-wei Chen, Wei-hua Zhang.Stiffness-damping matching method of an ECAS system based on LQG control[J].Journal of Central South University,2014,219(1):439-446.
[10]张慧刚.基于模糊PID控制的重型卡车半主动阀气悬架平顺性研究[D].太原:太原大学,2011.
[11]刘小斌,刘小金.基于LQG控制器的主动悬架系系设计与仿真[J].兰州调工大学学报,2014,40(1):33-36.
[12]罗鑫源,杨世文.基于AHP的车辆主动悬架LQG控制器设计[J].振动与冲击,2013,32(2):102-106.
[13]S. Rajendiran, P. Lakshmi. Simulation of PID and fuzzy logic controller for integrated seat suspension[J].Journal of Mechanical Science and Technology,2016,30(10):4565-4570.
