基于恒定频率转矩控制器的感应电机直接转矩控制
2018-04-26梅柏杉刘晶晶
梅柏杉,刘晶晶
(上海电力学院,上海 200090)
0 引 言
感应电机的直接转矩控制技术具有控制结构简单、鲁棒性好、依赖电机参数少的优点,但其存在两个缺点:使用逆变器造成地开关频率变化;电机运行条件变化造成的转矩脉动[1]。
文献[2]分析了基于滞环比较器的直接转矩控制系统的开关频率,发现开关频率主要受电机速度影响。文献[3]提出通过设置可变滞环带宽来维持开关频率恒定,但同时也增加了直接转矩控制的复杂度,并且转矩纹波仍然很高。文献[4]提出将滞环带宽设置为零,在固定的时间间隔选择合适的电压矢量输出,但会增加转矩纹波。文献[5]和文献[6]提出一种用于减少转矩纹波的计算有效电压矢量占空比的新方法,将一个开关周期分为两段甚至更多段合成新的电压矢量。文献[7]提出一种改进的SVM-DTC方法,利用转矩和磁链误差计算参考电压矢量,但转矩响应速度有所降低。
因此,本文提出一种具有恒定频率的直接转矩控制策略。通过用转矩控制器取代传统的滞环比较器以保持开关频率恒定,通过选择合适的转矩控制器的参数,在减小转矩脉动的同时避免反向电压矢量的选择。仿真结果验证了本文的转矩控制器的有效性。
1 感应电机的数学模型
两相静止坐标系下的感应电机数学模型如下。
电压、磁链方程:
ψs=Lsis+Lmir
(3)
ψr=Lrir+Lmis
(4)
式中:Us是定子电压;is,ir是定、转子电流;Rs,Rr是定、转子电阻;ωr是转子转速;ψs,ψr是定、转子磁链;Ls,Lr,Lm分别为定、转子自感和定转子互感。
电机的转矩和运动方程如下:
ψrα-isαψrβ)
(5)
式中:Te是电磁转矩;TL是负载转矩;J是转动惯量。根据上述方程,转矩的正、负向趋近斜率分别如下[3]:
dt=-Te1στs+1στr+32p2LmσLsLr(Us-jωrψs)·jψr
(7)

(8)

2 恒定频率转矩控制器的设计
本文的恒定频率转矩控制器(以下简称CFTC)包括一个PI控制器,两个比较器和两个三角波发生器,如图1所示。这两个三角波(Cupper和Clower)幅值相等、相位互差180°。CFTC的输出和三电平滞环比较器的输出一样,有3种状态:-1,0和1。

图1恒定频率转矩控制器
转矩控制器的输出:
2.1 转矩环的建模
PI控制器的参数选择对转矩控制器的正常运转非常重要。这些参数的选择需要基于线性控制系统理论,因此,需要将如图2所示的转矩环平均化和线性化。图2中的虚线框代表了图1的转矩控制器。

图2转矩环


(10)
(11)
式中:ωs是定子磁链角频率的瞬时值,由下式给出:
将式(12)代入式(10)、式(11)得到:

(13)
(14)



得到的新方程中假设定转子磁链为常量。将式(13)、式(14)平均化,简化如下:
主要以陕西省榆林市清涧地区作为试验所在地。该地区是典型的黄土高原丘陵沟壑区,昼夜温差大,年均气温10摄氏度,年均降水450毫米,无霜期200天。

(15)
可通过引入Te,d和ωslip的小扰动将式(15)线性化并转换到频域,得到其小信号传递函数和稳态方程:

(16)

(17)
由于转差频率很小,将式(16)的转差频率忽略,得到转矩环如图3所示。理想情况下,转矩环的带宽应尽可能大,以便获得快速转矩响应。但是,带宽及转矩控制器参数的选择,比如Kp,Ki是受限制条件控制的,本文将在后面继续讨论。简化模型只是为控制器参数的选择提供一个参考,具体控制器参数的选择还要依据仿真效果来决定。

图3线性化转矩环
2.2 PI控制器的参数选择
本文电机为鼠笼型感应电机,电机参数后文给出。根据图3可知,开环只有一个极点At,将电机参数Ls= Lr=0.991 mH,Lm=0.649 mH,代入式(15)中,求得At=-531,如果只有Kp作用,会产生有限直流增益造成非零稳态误差。因此Tc的斜率绝对值不能超过三角波的斜率。对于式(13)的正向斜率,必须满足下式:




当频率接近载波频率的一半时,模型变得不准确。因此开环增益交叉频率应该小于这个值。如果PI控制器的零点选为开环控制器的极点(A=-531),积分增益可以由下式计算得到:Ki=KpA。
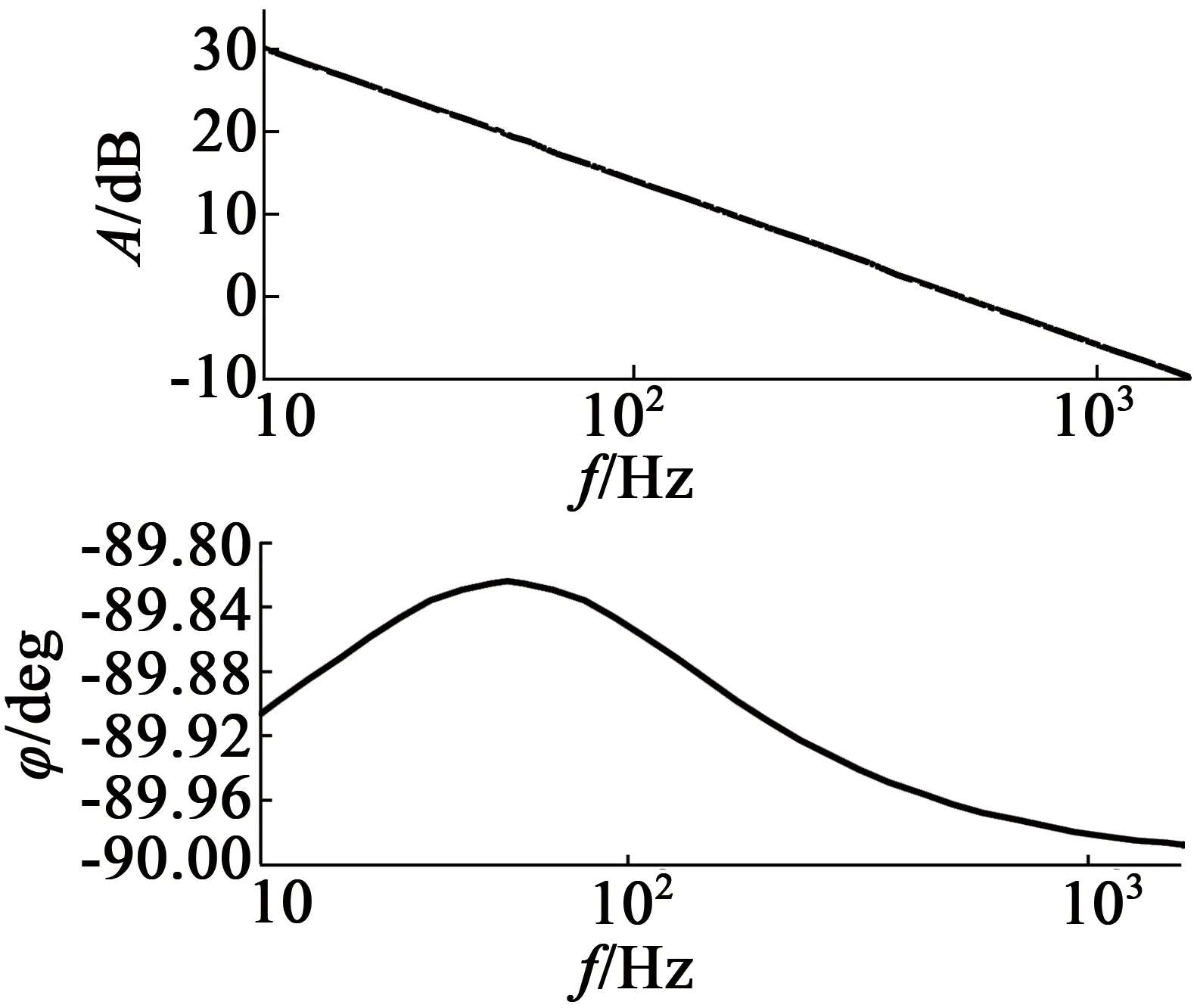
图4PI控制器的开环波特图
基于此PI参数的开环增益波特图如图4所示。
3 仿真与分析
利用MATLAB/SIMULINK平台,分别搭建基于CFTC和滞环比较器的感应电机直接转矩控制系统进行仿真验证。电机参数如下:Rs=0.1Ω,Rr=0.205Ω,Ls=Lr=991 mH,Lm=649 mH,J=0.102 kg·m2,p=2,Ψs=0.5 Wb,Us=160 V。基于CFTC的感应电机直接转矩控制系统框图如图5所示。
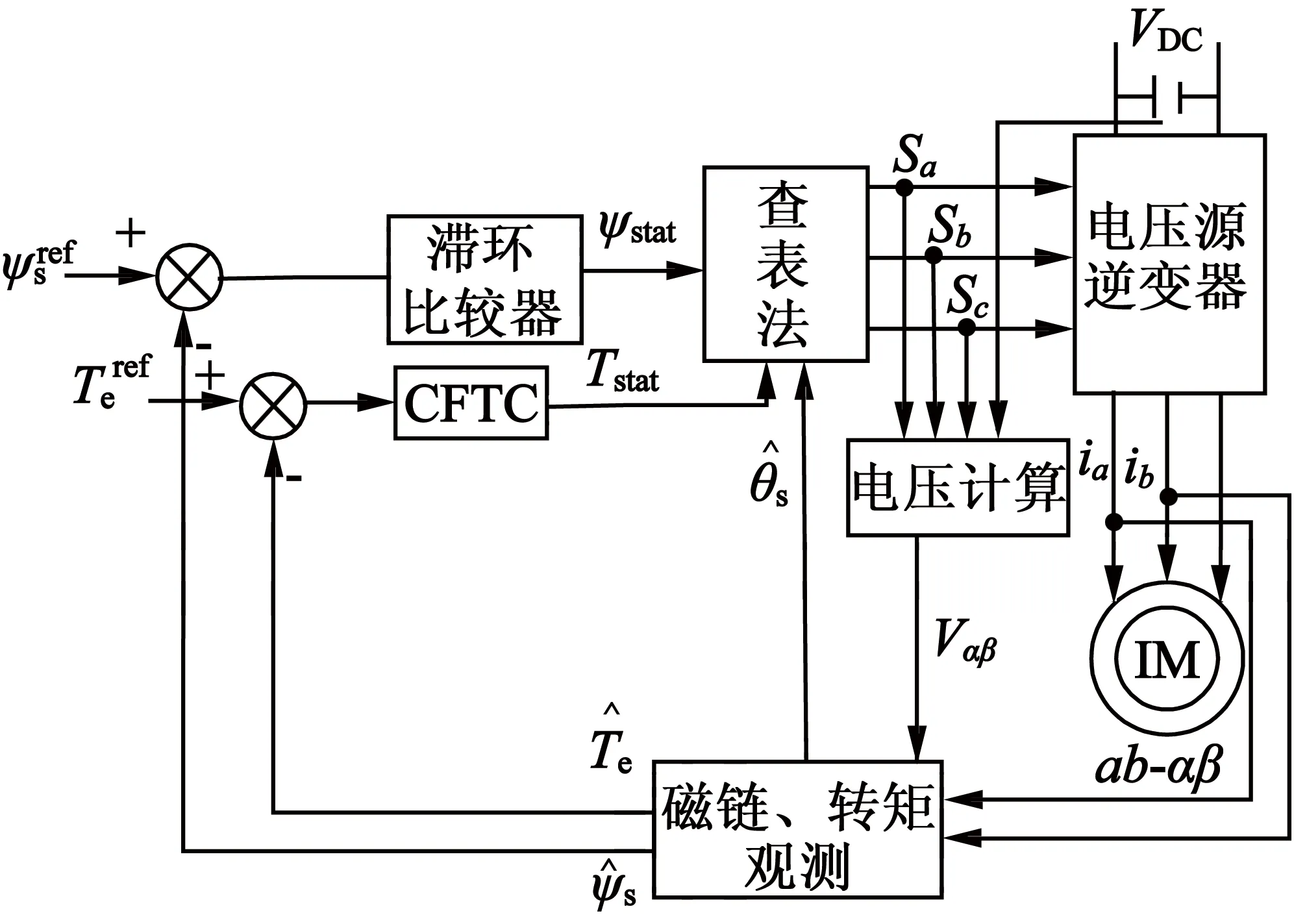
图5基于CFTC的感应电机直接转矩控制框图
基于传统滞环比较器和CFTC的相电流频谱如图6、图7所示,转速分别设置为10 rad/s和20 rad/s。以a相电流为例,从图6(b)、图7(b)可以看到,无论转速如何变化,本文的CFTC能成功地将相电流的主要谐波分量限制在三角波频率附近,即3.1kHz,而从图6(a),图7(a)看出,基于滞环比较器的相电流频谱是发散的。因此,本文的CFTC可保持开关频率恒定。

(a) 滞环比较器
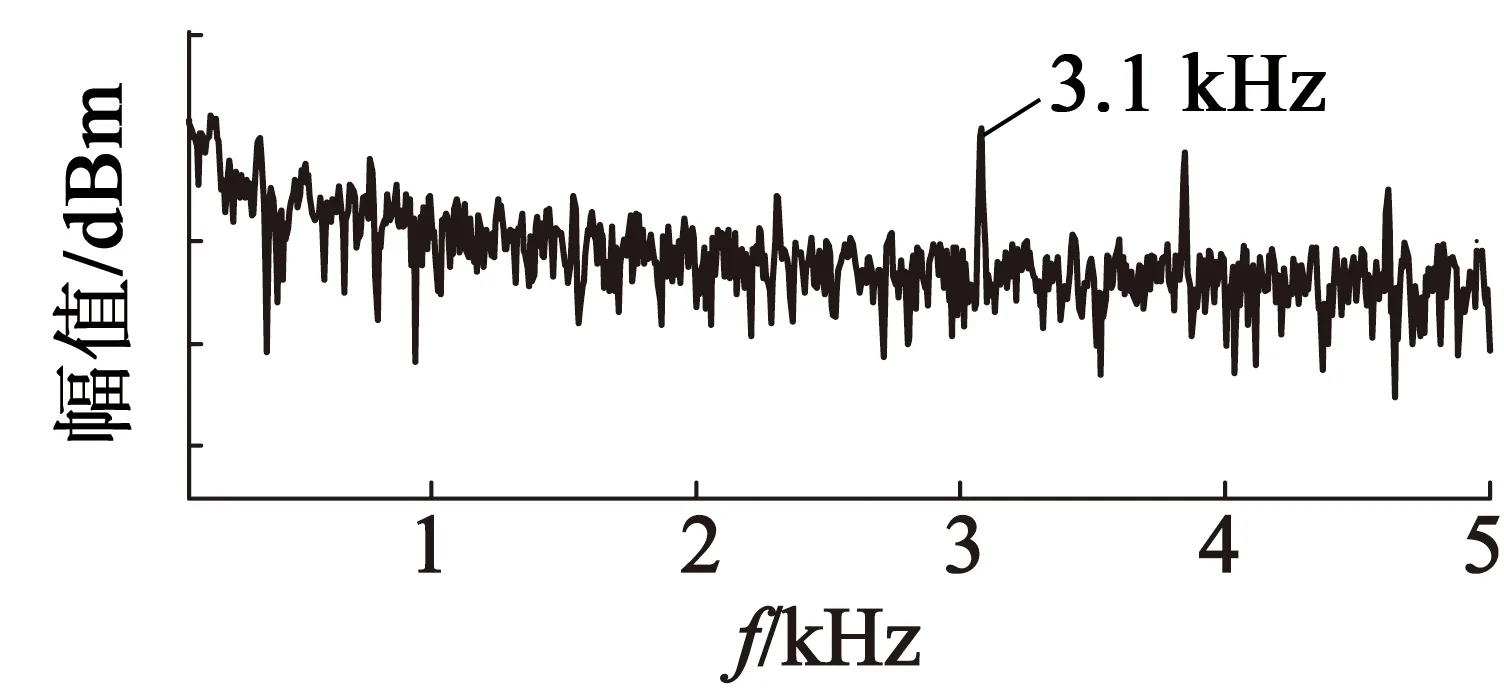
(b) CFTC
图610 rad/s时a相电流频谱图

(a) 滞环比较器

(b) CFTC
图720 rad/s时a相电流频谱图
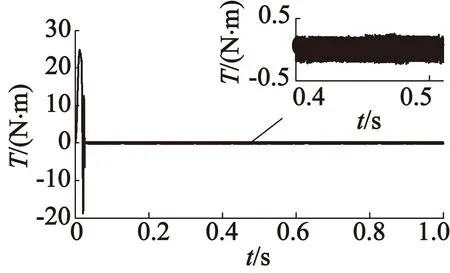
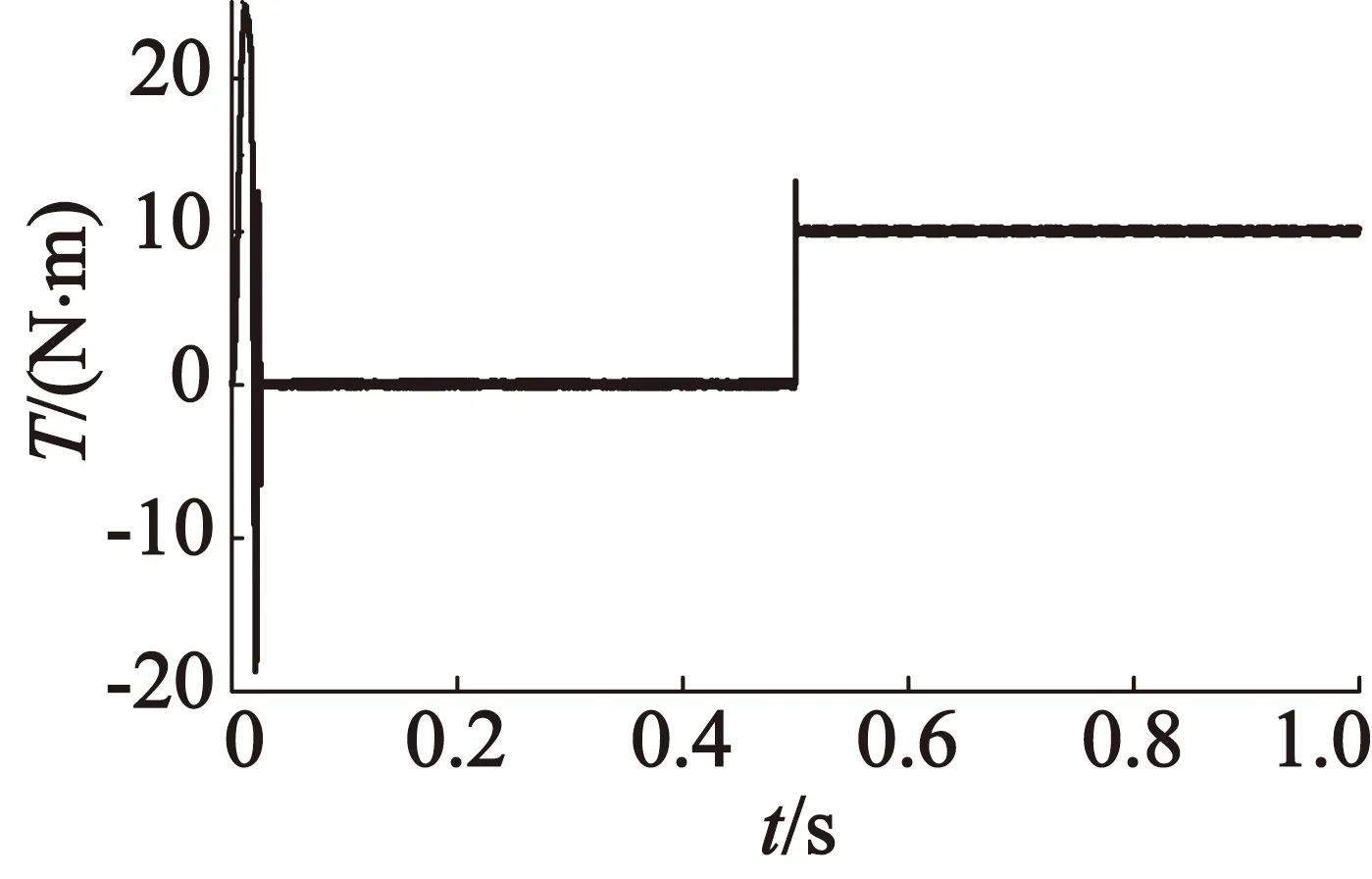
图8给出转速为5 rad/s,空载下滞环比较器和CFTC的转矩响应波形及其0.4~0.5 s放大图。由图8可以看出CFTC不仅保持住传统直接转矩控制响应迅速的优点,并且对电磁转矩的控制精确性更高。由局部放大图看出,滞环比较器的转矩偏差在±0.22N·m,而CFTC的转矩偏差只有±0.02N·m,转矩波动减少了90.9%。图9为a相电流FFT分析图,其中滞环比较器的THD=37.20%,CFTC的THD=17.20%,总谐波失真度降低了54.1%。因此CFTC控制器不仅使输出转矩纹波得到极大的降低,电流谐波也得到较大改善,电流波形更为平滑。图10示出电机空载至额定负载下两种控制方案的转矩响应波形。由图10可见,0.5 s时转矩波动较大,这是由于突增负载瞬间,转速有所下降,但随后由于速度外环的控制作用,转速迅速稳定在给定值。 由此可见,基于CFTC的系统抗负载扰动性能更好,且相比之下CFTC的转矩脉动更小,所以运行平稳,稳态性能更好。
(a)滞环比较器

(b)CFTC
图8转矩响应及0.4 s~0.5 s放大图

(a) 滞环比较器

(b) CFTC
图9a相电流FFT分析
(a) 滞环比较器

(b) CFTC
图10突增负载时的转矩响应
最后,为了验证CFTC的动态跟随情况,给定电机转速设置为75 r/min,±35 r/min,跳变时间为0.5 s,0.9 s,1.4 s,相应的转速和转矩响应波形如图11所示。从图11中转速曲线及转矩响应看出,CFTC的转矩偏差为±0.02 N·m,峰值为20 N·m;而滞环比较器的转矩偏差为±0.65N·m,峰值为40N·m。因此,在低速状态下,本文的CFTC能及时跟随转速变化,动态性能较好。在电机从正向旋转过渡到反向旋转的过程中,转矩波动得到有效降低,并且更为平滑。

(a) CFTC

(b) 滞环比较器
图11转矩响应
4 结 语
恒定频率转矩控制器和传统直接转矩控制系统相比,在保留直接转矩控制响应快速优点的同时,不仅可以保持开关频率恒定,更能有效减小转矩纹波及电流谐波。仿真结果表明,基于CFTC的感应电机直接转矩控制系统在不改变原有直接转矩控制系统结构简单的同时,改进了传统DTC系统的性能,使输出转矩及电流更为平滑。
[1] 张峰.异步电机直接转矩控制及实验研究[D].大连:大连海事大学,2014.
[2] KANG J W,SUL S K.Analysis and prediction of inverter switching frequency in direct torque control of induction machine based on hysteresis bands and machine parameters[J].IEEETrans.Ind.Electron,2001,48(3):545-553.
[3] KANG J W,CHUNG D W,SUL S K.Direct torque control of induction machine with variable amplitude control of flux and torque hysteresis bands[J].Proc.Int.Conf. Electric Machines and Drives(IEMD’99), 1999,640-642.
[4] HABETLER T G,PROFUMO F,PASTORELI M,et al.Direct torque control of induction machines using space vector modulation[J]IEEE Transactions Ind.Application,1992,28(5):1045-1053.
[5] KANG J W,SUL S K.Torque ripple minimization strategy for direct torque control of induction motor. in Conf.Rec.IEEE-IAS Annu.Meeting,1998:438-443.
[6] CASADEI D,SERRA G,TANI A.Improvement of direct torque control performance by using a discrete SVM technique.in Proc. IEEE PESC’,1998,98(2):997-1003.
[7] 穆飚,李鸿彪,曼苏乐.一种改进的空间矢量调制的异步电机直接转矩控制系统[J].电气自动化2012,34(4):45-
