基于ADRC与SMO的PMSM无位置传感器控制
2018-04-26李成才云献睿周肖飞何凤有
李成才,云献睿,周肖飞,何凤有
(中国矿业大学,徐州 221008)
0 引 言
PI控制器在基于滑模观测器(以下简称SMO)的永磁同步电机无位置传感器双闭环控制中,速度环与锁相环的参数整定较难协调。当观测的位置与速度的误差较小时,系统的速度超调较大,抗负载扰动能力差。基于经典控制理论与状态观测器的自绕抗控制器(以下简称ADRC)无超调,抗扰能力强,不依赖于系统数学模型。ADRC仅关注于系统输入输出,而把系统内扰和外扰归结为系统的总扰动以实时估计[1]。
基于滑模观测器的PMSM无位置传感器是近年来研究的热点[2-6]。如何准确估计反电动势中的位置信息,削弱滑模固有的抖振问题,实现位置的无误差跟踪是中高速阶段需要解决的问题。采用诸如线性饱和函数、Sigmoid函数[4]、双曲正切函数、正弦型饱和函数[6]等替代符号函数的方法,可以减弱抖振现象。当系统达到稳态,运行在饱和函数的边界层以内,滑模变结构控制转变为状态线性反馈的形式,此时系统控制已失去滑模的不变性。因此,将非线性的ADRC与SMO相结合,不仅可以有效抑制系统在状态线性反馈下的多参数扰动,而且可以实现各个速度的平滑过渡,并且能够对转子位置和速度准确估计。
1 ADRC设计
1.1 PMSM数学模型
采用id=0的矢量控制方式的SPMSMd-q坐标系下的状态方程:
式中:iq,uq分别为q轴定子电流与电压;R为定子电阻;L为交直轴电感;ψf为转子磁链;ωr为转子角速度;p为极对数;J为转动惯量;TL为负载转矩;B为粘性摩擦系数。
将电流和速度方程分别改写成电流环和速度环的电压和电流给定方程:
bqi·q-f1(iq,ψf,R,L,ωr)

(2)

f1(iq,ψf,R,L,ωr)和f2(iq,ψf,TL,J,ωr)视为系统总扰动。把总扰动的估计放在扩展状态观测器(以下简称ESO)和非线性PID(以下简称NPID)中实现,从而输出q轴的电压和电流给定,使系统达到期望的转速。对总扰动估计而建立ESO和NPID时,无需基于系统精确数学模型,根据输出与输入之间的误差,整定ESO和NPID参数,使误差有限时间收敛至零。因此,既可以简化电机内外多参数扰动的估计和观测,又能够保证系统的稳定运行。
1.2 ESO,NPID,TD设计
为了简化系统设计过程,减少整定的参数,本文将ESO与NPID整体设计,将NPID设计为线性加权的形式,而系统对扰动的抑制能力并没有降低。以转速环为例,设计:

电机起动瞬间的误差最大,它是造成传统PI控制器超调和积分饱和的主要原因。设计跟踪微分器作为缓冲,可起到平滑过渡的作用。
跟踪微分器设计[4]:

(4)
式中:fal(e,α,h0)=|e|αsgn(e) |e|>h0

根据式(2),转速环和电流环自抗扰控制系统框图如图1所示。

图1速度环和电流环的自抗扰控制框图
2 二阶SMO设计
隐极式PMSM在静止两相坐标系下的定子电流数学模型:
式中:iα,iβ,uα,uβ分别为静止两相坐标系下的定子电流和电压;eα,eβ为反电动势。
设估计的电流状态方程:
式(6)减式(5)得定子电流误差方程:
设计一阶滑模切换面:
二阶滑模切换面设计:


es=-vs
(10)
滑模控制律:
式中:所出现的下标s为α,β;c,γ,η,λ均大于零。
对式(11)求导并代入式(12)得:
3 实验验证
为验证本文ADRC与SMO在PMSM无位置传感器有效性,进行了PI+SMO和ADRC+SMO对比分析。电机参数设置如下:定子等效电阻为2.75 Ω,定子等效电感为8.5 mH,转子磁链为0.182 Wb,转动惯量为0.001 kg·m2,粘性摩擦系数为0.01 N·m·s,极对数为3。ADRC与SMO系统控制框图如图2所示。

图2ADRC与SMO控制系统框图
转速环ADRC参数整定:βω1=10 000;βω2=5 000;Kp1=0.5;Ki1=500。电流环参数整定:βi1=80 000,βi2=4 000,Kp2=1 000。滑模观测器参数整定:λ=10;c=5;γ+η=500 000。
电机初始转速给定500r/min,0.05s加载5 N·m,0.1 s再加载3 N·m,0.15 s减载4 N·m,0.2 s变速度给定为1 000 r/min。基于PI控制器的积分型SMO和基于ADRC的积分型SMO所观测的反电动势信息如图3所示。


(a) PI(b) ADRC
图3SMO观测的反电动势
由图3(a)和图3(b)可知,二阶积分型SMO结合PI控制器和ADRC所估计的电机反电动势都具有较好的正弦性,进而能够准确估计转子的位置和速度,因此,本文的二阶积分性SMO的有效性得到了的验证。
图4和图5分别为基于PI和ADRC的SMO所观测的速度和位置波形。PI与SMO的PMSM无位置传感器控制系统转速和位置波形如图4所示。在保证速度和位置跟踪误差较小时,转速的超调较大,给定转速为500 r/min时的超调为17%,给定转速为1 000 r/min时的超调为9.3%。因此,变速度给定时超调量在不断变化,适用于高速PI参数的系统,在由高速切换至低速时容易引起超调的增大而导致系统不稳定。当调节双闭环的PI控制器参数使系统输出的估计转速无超调时,实际转子位置和估计转子的位置误差较大,系统的抗扰能力较低。
基于PI控制器的系统在加载卸载时有5 r/min的速降和速升,起动时实际的转子转速与估计的转速最大误差为88 r/min,在3 ms时,估计的转速跟踪上实际的转速,达到稳态时,实际转速与估计转速之间的误差为2 r/min。稳态时位置跟踪误差为1.14°。


(a) 转速观测(b) 转速观测误差(c) 位置观测(d) 位置观测误差
图4基于PI和SMO的转速与位置观测
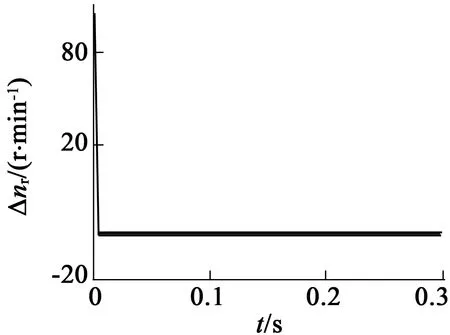
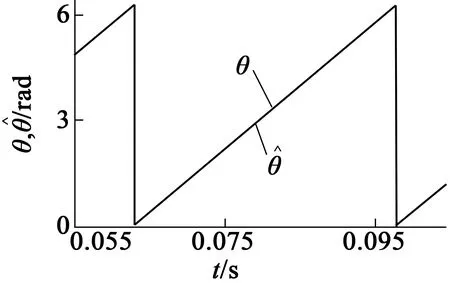
ADRC与SMO的PMSM无位置传感器控制系统转速和位置波形如图5所示。由于TD的缓冲作用,电机起动平滑,超调量仅为0.9%,起动瞬间实际转速与估计转速最大误差为79 r/min,估计的转速在3.2 ms跟踪上实际的转速;0.05 s,0.1 s,0.15 s加载和卸载的瞬间分别有10 r/min,10 r/min和16 r/min的波动,而后快速恢复至给定转速,达到稳态时实际转速与估计的转速之间误差为1.4 r/min,稳态时位置跟踪误差为1.01°。



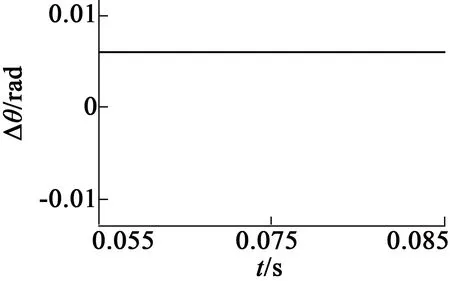
(a) 转速观测(b) 转速观测误差(c) 位置观测(d) 位置观测误差
图5基于ADRC和SMO的转速与位置观测
4 结 语
二阶积分型滑模观测器去除了低通滤波器,反电动势的正弦性较好,能够准确估计转子的位置和转速,解决了低通滤波器导致的相位补偿问题,简化了观测器的设计。传统PI控制器在以SMO的PMSM无位置传感器中,超调大,抗扰能力弱,鲁棒性较差。而ADRC在不同转速给定下都能平滑切换,转速无超调,控制器参数适用的转速带宽较大,且对系统内外抗扰能力强,在负载转矩扰动较大的情况下,能快速收敛到给定转速。
[1] HAN Jingqing.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-906.
[2] DU Bochao,WU Shaopeng.Application of linear active disturbance rejection controller for sensorless control of internal permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronics,2016,63(5):3019-3027.
[3] 张晓光.永磁同步电机调速系统滑模变结构控制若干关键问题研究[D].哈尔滨:哈尔滨工业大学,2014.
[4] KIM Hongryel,SON Jubum.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2016,63(5):3019-3027.
[5] 沈德明,姚冰.基于线性自抗扰控制技术的PMSM仿真研究[J].控制工程,2015,23(S0):51-55.
[6] 陆婋泉,林鹤云.永磁同步电机无传感器控制的软开关滑模观测器[J].电工技术学报,2015,30(2):106-112.
