基于滑模观测器永磁同步电机迭代学习控制
2018-04-26刘偲艳田拥军兰永红
李 晖,刘偲艳,田拥军,兰永红
(1.湖南理工职业技术学院,湘潭 411100;2.湘潭大学,湘潭 411105)
0 引 言
永磁同步电机因其高功率密度、低转动惯量和高效率等特点,在现代工业领域的伺服系统技术中具有广泛应用。但是,转矩脉动的存在制约发展,因此对转矩脉动抑制的研究具有实际意义[1]。近年来,国内外众多学者在永磁同步电机转矩脉动方向开展了很多研究,总体可分为两类[1]:第一类主要考虑从电机设计方向进行优化[2],使电机参数更理想,从而提高转矩的平滑性,降低转矩脉动。但该类方法对转矩脉动抑制效果有限,电机造价却很大程度增加。第二类主要考虑从电机控制方向进行优化,使控制算法更优,从而抑制脉动分量。文献[3]采取谐波电流注入法,能够实现指令电流的完全跟踪,较好地抑制转矩脉动。文献[4]利用自适应控制技术,在线调整系统参数。文献[5]提出一种在线估计技术的闭环控制算法,较大程度地抑制转矩脉动。但这些方法都依赖于永磁同步电机精确的数学模型。文献[6]提出一种ILC策略,通过重复利用输入输出信息构造产生目标输出的控制信息,从而改善跟踪性能,且不依赖于精确的数学模型。
高阶ILC算法[7]同时利用当前迭代过程输入输出信息和历史信息来构造学习算法,从而得到新的控制输入。与普通学习算法相比,高阶迭代学习算法具有更高的系统收敛速度。
本文在文献[6]的基础上,采用高阶形式,利用历史迭代过程的控制信息,可提高系统收敛性能。
上述控制策略均需要获得精确的转子速度和位置信息,传统传感器测量简单、有效,但增加电机造价、复杂程度,同时易受环境影响,降低可靠度。文献[8-9]提出滑模观测器,能有效估算转子信息,但同时引入抖振。本文设计二阶滑模观测器估算转子位置和转速,可克服传统滑模观测器“抖振”的问题。最后,利用MATLAB/Simulink仿真说明了此方法的有效性。
1 永磁同步电机数学模型
永磁同步电机(面贴式)在同步旋转(d-q)坐标系d,q轴电压方程:
diddt=-RLid+ωeiq+1Lud
(1)
diqdt=-RLiq-ωeid-ψfLωe+1Luq
(2)
式中:id,iq为定子电流d,q分量;ud,uq为定子电压d,q分量;L,R为定子电感、电阻;ωe为转子电角速度;ψf为永磁体磁链。
永磁同步电机转矩方程:
Tm=3p2ψfiq=ktiq
(3)
式中:kt=3p2ψf为转矩系数,p为电机极对数。
永磁同步电机动力学方程:
dωdt=3pψf2Jiq-BJω-TLJ
(4)
式中:J为转动惯量;B为摩擦系数;TL为电机负载转矩;ω为转子机械角速度。
2 迭代学习控制器
为了定性分析二阶迭代学习控制策略,考虑如下动态系统:
x·k+1(t)=Axk+1(t)+Buk+1+f(x)
yk+1(t)=Cxk+1(t)+dk
xk+1(0)=0,t∈[0,T0]
(5)
式中:[0,T0]为运行持续时间;A,B,C分别为相应维数的矩阵,且满足CB≠0;f(x)为非线性量;dk为转矩扰动。由文献[10]可知,所有含微分增益Γd的学习控制策略,其收敛条件都一样,可表示:
ρ=1-ΓdCB<1
(6)
定理1:向量函数f:f(t)=[f1(t),…,fm(t)]T,t∈[0,T0],那么向量函数f的Lebesgue-p范数[11]:

(7)
由文献[12]可以知道,limp→∞‖f(·)‖=‖f(·)‖∞=‖f(·)‖sup。
2.1 二阶迭代学习控制器
假设yd(t),t∈[0,T0]为目标输出,构造二阶PD型ILC (L(c1,c2))如下:
u2(t)=u1(t)+Γp1e1(t)+Γd1e·1(t)
uk+1(t)=c1[uk(t)+Γp1ek(t)+Γd1e·k(t)]+
c2[uk-1(t)+Γp2ek-1(t)+Γd2e·k-1(t)]
(8)

ρ1=‖1-Γd1CB‖<1
ρ2=‖1-Γd2CB‖<1
(9)
第k+1次迭代系统跟踪误差ek+1(t)可表示:
‖ek+1(·)‖p=c1ρ1‖ek(·)‖p+c2ρ2‖ek-1(·)‖p
(10)
所以,limk→∞‖ek+1(·)‖p=0,二阶迭代学习控制算法收敛。证明系统在有限时间内能够收敛,下面将对收敛速度进行分析。
2.2 一阶迭代学习控制器
假设式(8)中c1=1,控制律退化为一阶PD型ILC(L(1)),表达式如下:
uk+1(t)=uk(t)+Γp1ek(t)+Γd1e·k(t)
t∈[0,T0],k=1,2,3,…
(11)
式中:Γp1,Γd1,uk(t),ek(t)与式(8)一样,结合电机动力学式(4)和PD-ILC的收敛条件式(6),可得一阶迭代学习控制算法的收敛条件:
ρ1=1-Γd1CB<1
(12)
第k+1次迭代系统跟踪误差ek+1(t)可表示:
‖ek+1(·)‖p=ρ1‖ek(·)‖p
(13)
所以,可得limk→∞‖ek+1(·)‖p=0,一阶迭代学习控制算法收敛。
3 收敛速度对比
令limk→∞‖ek+1(·)‖p‖ek(·)‖=ρ,由文献[12]可得ρ值大小与系统跟踪误差收敛速度成反比,这样,可通过比较ρ值的大小来判断L(1),L(c1,c2)收敛速度的快慢。令L(1),L(c1,c2)的ρ值分别为ρ[L(1)],ρ[L(c1,c2)]。式(10)两边同时除以‖ek(·)‖p,并取极限可得:
ρ2-c1ρ1ρ-c2ρ2≤0
(14)
那么,式(14)解的范围:
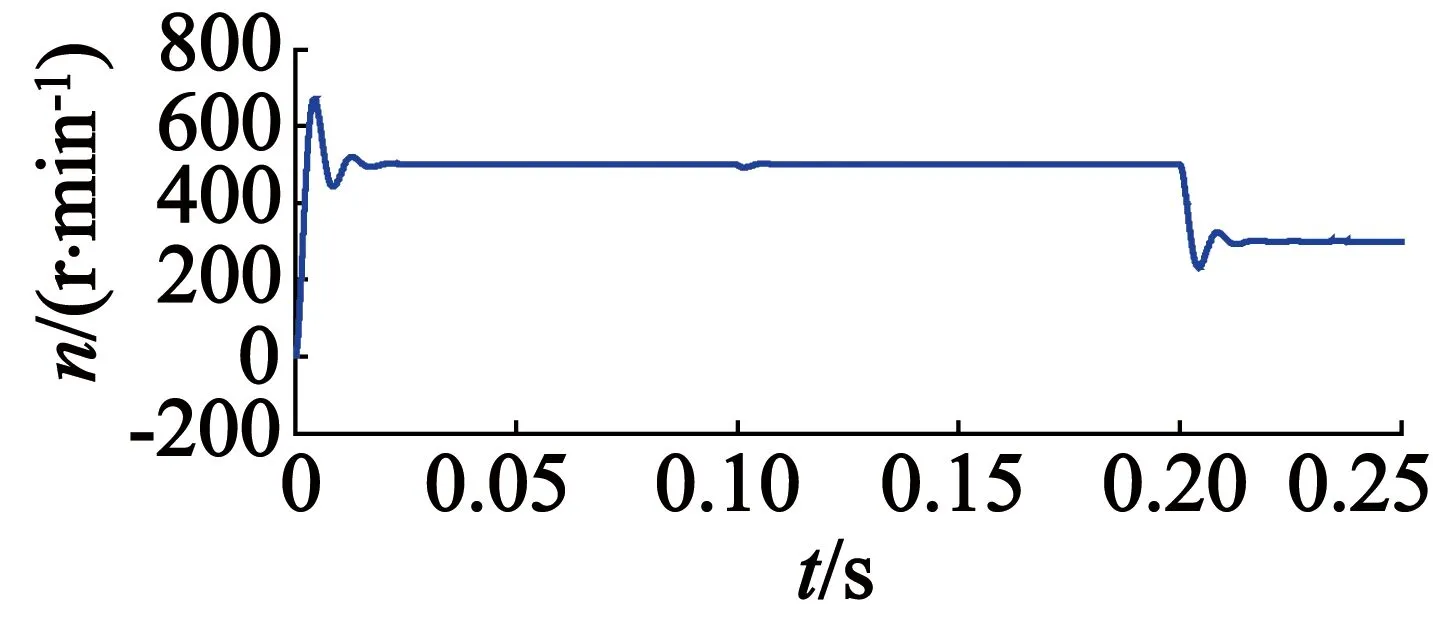
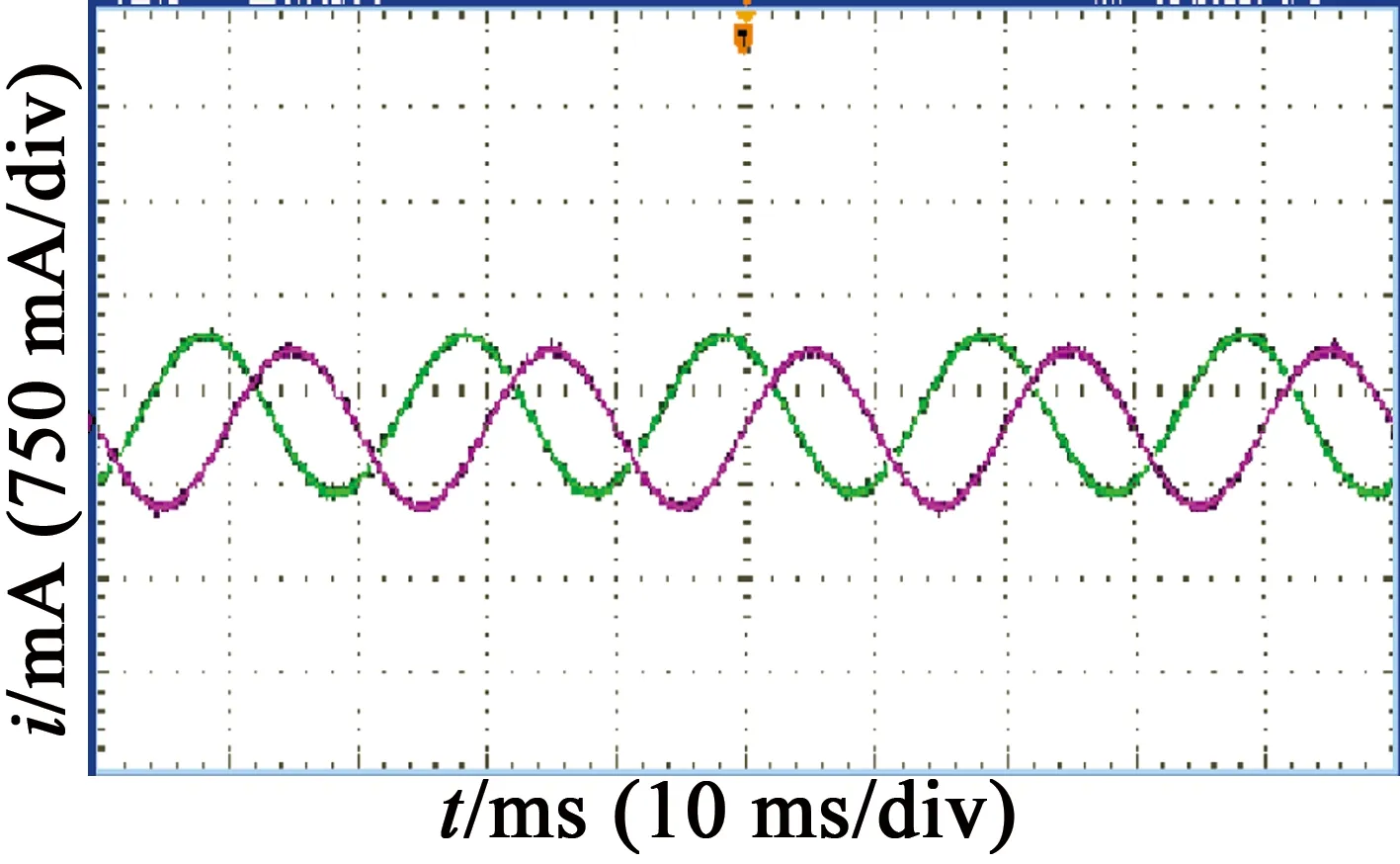
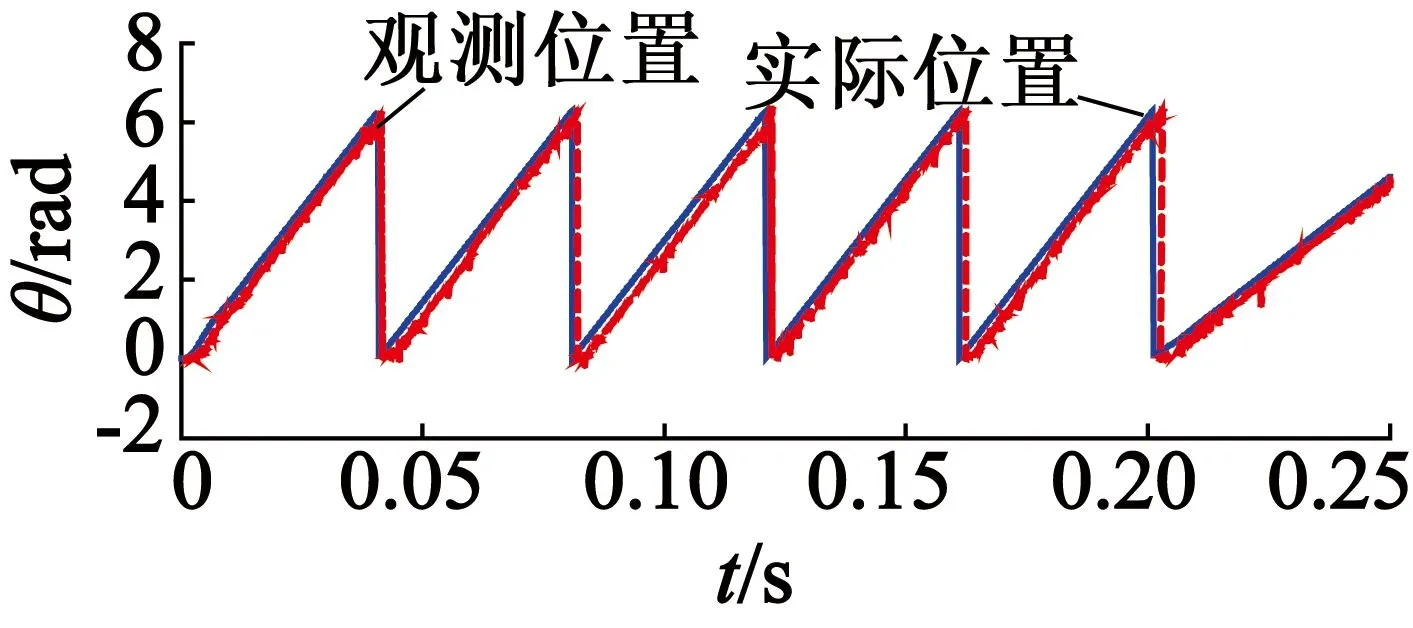
c1ρ1-(c1ρ1)2+4c2ρ22<ρ (15) 由于c1+c2=1,又ρ>0。则上述不等式等价于0<ρ F(c1)=c1ρ1+(c1ρ1)2+4c2ρ22,0 (16) 对F(c1)进行微分可得: (17) ρ1(c1ρ1)2+4ρ2(1-c1)= 即F′(c1)>0,可得:F(c1)min=ρ2,F(c1)max=ρ1。 所以ρ[L(c1,c2)]=F(c1)<ρ1=ρ[L(1)],证明L(c1,c2)误差收敛速度比L(1)快。 F(c1)min=F(1)=ρ1 F(c1)max=F(0)=ρ2 (19) 所以,ρ[L(c1,c2)]=F(c1)>ρ1=ρ[L(1)],证明L(c1,c2)误差收敛速度比L(1)慢。 从上述分析可得,比例增益Γp1,Γp2和微分增益Γd1,Γd2的值决定不同的ρ1,ρ2的值,决定L(c1,c2)收敛速度与L(1)收敛速度的关系。 在静止α-β系,永磁同步电机模型[13]: i^α=-Riα-eα+uαL i^β=-Riβ-eβ+uβL (20) 式中:iα,iβ为定子电流;uα,uβ为定子电压;eα,eβ为反电动势。 eα=-ψfωesinθe eβ=-ψfωecosθe (21) 式(21)为α-β坐标系PMSM数学模型。利用该数学模型设计二阶滑模观测器如下: i^·s=-Ri^s+us+zL (22) 结构框图如图1所示。 图1二阶滑模观测器结构框图 式(22)中:i^s=[i^α,i^β]是is=[iα,iβ]的估算值;us=[uα,uβ];z=[zα,zβ]。由式(20)、式(22)相减可得到电流估算误差表达式: s·s=i^·s-i·s=-RssL+esL+zL (23) 式中:ss=[sα,sβ]为电流估算误差;sα=i^α-iα,sβ=i^β-iβ;es=[eα,eβ]。 设计滑模面: 式中:k1,k2分别为滑模面比例、积分增益。 定理2:若根据式(23)系统误差状态方程设计滑模面为式(24),式(25)、式(26)、式(27)是所设计的滑模控制律,那么,定子电流估算误差i^s=[i^α,i^β]为零,二阶滑模观测能有效地估算转子位置和转速,系统收敛。 z=zeq+zsw (25) 式中:zeq,zsw分别为等效控制算法和切换控制算法。等效控制应满足条件S·=0,结合式(24)可得: zeq=-k2k1Lss+Rss-es (26) zsw=Lksgn(S) (27) 证明:系统Lyapunov函数定义: V=12S2 (28) 对式(28)求导可得:V·=S·S SS·=S[k1ss+k2ss]= Sk1L[-Rss+es-k2k1Lss+Rss-esLksgn(S)]+k2ss= S[k1k2sgn(S)]=k1kS (29) 当k1k<0时,则V·<0。二阶滑模控制满足S=S·=0,系统收敛。反电动势可表示:e^α=-zα,e^β=-zβ。 故永磁同步电机转子位置观测值: θ^e=-arctaneαeβ=-arctanzαzβ (30) 可推算出转子转速观测值: (31) 采用二阶PD型迭代学习控制产生q轴补偿电流,结构框图如图2所示,永磁同步电机参数选取如表1所示。 在仿真试验中参数设计:Γp1=0.8,Γd1=0.01,Γp2=0.3,Γd2=0.006,加权系数c1=c2=0.5,k1=1,k2=15,k=30 000。MATLAB/Simulink参数设定:PMSM起始目标速度值500 r/min,0.2 s目标速度设定为300 r/min。PMSM起始目标转矩5 N·m,0.1 s目标转矩设定为10 N·m。 图2系统控制结构框图 表1永磁同步电机参数 参数值参数值定子电阻R/Ω0.56极对数p3转动惯量J/(kg·m2)0.0021永磁磁通Ψf/Wb0.82定子电感L/H0.0153粘滞摩擦系数B0.0001 图3表示采用二阶PD型迭代算法时系统的输出响应图,图4表示采用一阶学习算法时系统输出响应图。在扰动情况下,二阶迭代学习控制在0.1s时刻转矩增至10N·m,能准确跟踪外部目标值;0.2s时刻转速降为300r/min,转矩收敛速度快于一阶迭代学习控制,三相定子电流脉动值小于一阶迭代学习控制。 (a) 三相定子电流 (b) 转速(c) 电磁转矩 图3二阶ILC控制系统仿真图 (a) 三相定子电流 (b) 转速(c) 电磁转矩 图4一阶ILC控制系统仿真图 在如图5所示的实验平台上进行实验,实验结果如图6所示。图6(a)转速为500r/min时相应转子两相电流波形,图6(b)此时定子电压波形,图6(c)为电机位置估计的波形。 图5实验平台 (a) 两相电流波形 (b) 定子电压波形(c) 电机位置估计波形 图6实验结果 本文根据永磁同步电机的周期性脉动问题,提出一种二阶ILC策略,利用Lebesque-p范数对系统误差的收敛情况进行分析,然后与传统迭代学习算法进行对比,并分析误差收敛速度与比例、微分设置的关系。另外提出二阶滑模观测器估算电机转子位置与转速,通过配置不同增益可获得快速的收敛速度。 [1]JAHNSTM,SOONGWL.PulsatingtorqueminimizationtechniquesforpermanentmagnetACmotordrives-areview[J].IEEETransactionsonIndustrialElectronics,1996,43(2):321-330. [2]CHUWQ,ZHUZQ.Investigationoftorqueripplesinpermanentmagnetsynchronousmachineswithskewing[J].IEEETransactionsonMagnetics,2013,49(3):1211-1220. [3]LIZhixin,CHENZhenfei,AlShufeng.Torqueripplereductionfornon-sinusoidalback-EMFpermanentmagnetsynchronousmachineswithcurrentharmonics[J].2016 19thInternationalConferenceonElectricalMachinesandSystems(ICEMS),Chiba,2016:1-4. [4]DongQuangDang,MuhammadSaadRafaq,HanHoChoial.OnlineParameterEstimationTechniqueforAdaptiveControlApplicationsofInteriorPMSynchronousMotorDrives[J].IEEETransactionsonIndustrialElectronics,2016,63(3):1438-1449,. [5]XUY,PARSPOURN,VOLLMERU.Torquerippleminimizationusingonlineestimationofthestatorresistanceswithconsiderationofmagneticsaturation[J].IEEETransactionsonIndustrialElectronics,2014,61(9):5105-5114. [6] 孙明轩,毕宏博,周国良,等.反馈辅助PD型迭代学习控制:初值问题及修正策略[J].自动化学报,2015,(1):157-164. [7] 逄勃,邵诚.高阶参数优化迭代学习控制算法[J].控制理论与应用,2015(4):561-567 [8] 亓立锋,杨淑英,张兴,等.基于滑模观测器的PMSM无速度传感器控制[J].电力电子技术,2016,(1):102-104+108. [9] 史婷娜,肖竹欣,肖有文,等.基于改进型滑模观测器的无刷直流电机无位置传感器控制[J].中国电机工程学报,2015(8):2043-2051. [10] OUYANG P R,PIPATPAIBUL P I.Iterative learning control:a comparison study[C]//ASME 2010 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers,2010:939-945. [11] PINSKY M A.Introduction to Fourier analysis and wavelets[J].Graduate Studies in Mathematics,2009,32(9):376. [12] XU J X,TAN Y.Robust optimal design and convergence properties analysis of iterative learning control approaches[J].Automatica, 2002,38(11):1867-1880. [13] 鲁家栋,刘景林,卫丽超.永磁同步电机转子初始位置检测方法[J].电工技术学报,2015,(7):105-111.



4 二阶滑模观测器设计


5 系统仿真









6 结 语
