数控机床进给系统动态特性评价研究*
2018-04-20周义成胡小秋胡雨伸
周义成,胡小秋,韩 兴,胡雨伸
(1.南京理工大学 机械工程学院,南京 210094;2.南京船舶雷达研究所,南京 210094)
0 引言
目前国内对数控机床进给系统的评价使用最多的是定位精度、重复定位精度等准静态评价方法,实际上机床的精度与工况密切关联,传统的准静态评价无法准确全面地判定机床的性能[1]。数控机床的优势在于能够提高零件的加工质量和加工效率,为满足这些要求,进给系统应该具有很好的动态性能,主要包括良好的抗振性和瞬态响应性能。
目前在机床动态性能评价方面,丁文政[2]对时域指标和频域指标进行评价,张广鹏[3]以动柔度值作为评价指标。但是实际工作时,机床的动态性能受到机械结构和控制特性的相互影响,文献[2-3]的指标不能全面评价机床的动态性能,其中文献[2]认为低阶固有频率越大越优,与实际工况不符;刘世豪[4]、王宇[5]、朱传军[6]等人对机床的综合性能进行评价研究,得到综合性能最优的机床。但文献[4-6]中的评价矩阵根据专家对指标性能进行评分,评判的标准具有不确定性,容易受到个人主观意识的干扰。
在评价方法方面,邵新宇[7]、米长富[8]等人运用传统的层次分析评价方法,没有考虑决策的模糊性,也不能表示出决策的中立状态。针对上述问题,本文引入文献[9-11]中改进后的直觉模糊层次分析法,建立了动态性能的评价指标体系和模糊判断矩阵,同时借助隶属度函数得到评价向量,最终得到各项子指标的评价向量和进给系统的动态特性评价结果。
1 评价体系的构建
1.1 抗振性能评价指标
衡量抗振性的指标主要有机床进给系统的固有频率和振幅,若固有频率接近机床工作时的激振频率则会产生共振,严重影响被加工工件的表面质量。
振幅作为另一个抗振指标,不同方向的振幅对加工质量的重要程度有所差异,加工误差敏感方向的振幅比其他方向的重要,可以将X、Y、Z三个方向的振幅作为评价指标。在一定的频率范围内,振幅的数值具有很多个,为了全面评价机床的抗振性能,选取各向振幅的平均值作为评价指标。
1.2 瞬态响应性能指标
数控机床对进给系统的进给速度加速度要求较高,启动、加速、减速的性能尤为重要。在瞬态响应性能指标中选取跟随误差、超调量、调整时间、上升时间、峰值时间五个关键指标。
(1)跟随误差指的是工作台实际所处位置和指令位置之间的位移差值。
(2)超调量是指实际位置与指令位置偏差的最大值,超调量会造成过切和欠切对对加工零件的加工质量产生影响。
(3)调整时间是指实际位置达到与指令位置之间的偏差达到误差允许的范围内所需要的时间。
(4)上升时间是指响应达到指令位置的90%时所需消耗的时间。
(5)峰值时间是指响应达到第一个峰值的时间。
综上所述,得到表1。

表1 数控机床进给系统动态性能评价指标体系
2 动态性能评价模型的建立
2.1 构造直觉模糊判断矩阵
对指标体系中的同一级指标构建直觉模糊判断矩阵,建立的原则是:在这一层指标之间进行两两比较其重要程度得到判断矩阵Rij(rij)n×n,其中rij=(uij,vij),uij称为隶属度表示第i个指标优于第j个指标的程度,vij称为非隶属度表示第i个指标劣于第j个指标的程度,πij=1-uij-vij称为犹豫度。
2.2 对判断矩阵进行一致性检验
为了保证矩阵内部元素的一致性,基于直觉模糊信息的距离测度[12],需用公式(1)对判断矩阵进行一致性检验[13]。
(1)

(2)
(3)

(4)
(5)
2.3 计算权重系数
得到满足一致性检验的矩阵之后,根据公式(6)[15]计算每个指标相对于上级指标含隶属度的权重。
(6)
根据权重公式(7)对公式(6)的计算结果进行去隶属度运算,得到每级指标的不含隶属度的权重,称为指标的权重得分。
(7)
对隶属于上级指标的同类指标的得分结果利用公式(8)进行归一化运算,得到最终权重。
(8)
2.4 构建评价矩阵
采用五级模糊隶属区间作为区分指标优劣的状态,最终评价结果表示为V={V1,V2,V3,V4,V5},其中V1={优秀} ,V2={良好} ,V3={一般} ,V4={较差} ,V5={很差} 。
2.5 综合性能评价
根据综合评价公式(9)计算各个指标的得分向量,最后得到综合评价向量。
Yi=σi·Vi
(9)
3 应用实例
3.1 构造直觉模糊判断矩阵
根据查阅相关文献和综合专家意见得到A总矩阵、抗振性A1矩阵、瞬态响应性A2矩阵、固有频率B11矩阵、振幅B12矩阵五个直觉模糊判断矩阵。以A2矩阵为例:
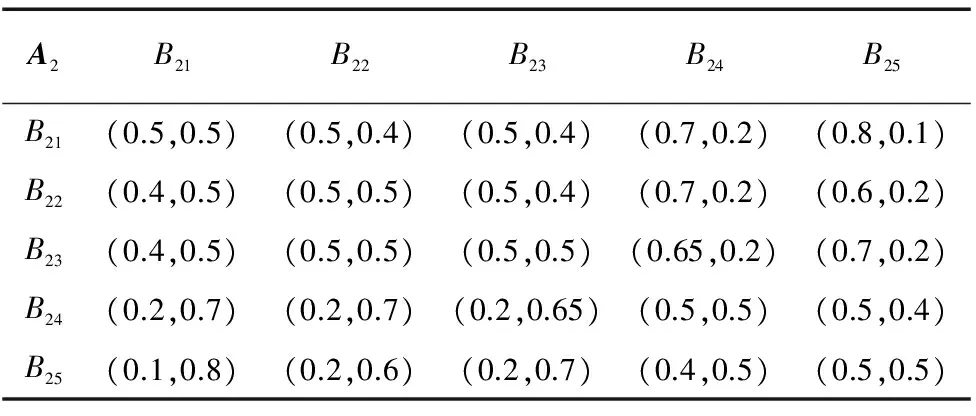
表2 瞬态响应性A2矩阵
3.2 对判断矩阵进行一致性检验


表3 瞬态响应性矩阵
3.3 权重系数的计算
采用公式(6)分别计算上述五个觉模糊一致性判断矩阵,得到各级指标的权重系数。

表4 各级指标含隶属度的权重系数
对总指标A总,由公式(7)~公式(8)得到其权重σA总=(0.5,0.5);同理,对抗振性A1,其最终权重σA1=(0.5,0.5);对瞬态响应性A2,其权重σA2=(0.239,0.228,0.229,0.156,0.145);对固有频率B11,其权重σB11=(0.327,0.271,0.226,0.174);对振幅B12,其权重σB12=(0.319,0.447,0.232)。
3.4 建立评价矩阵
本文提出评价等级隶属度函数,根据机床评价指标的性能[14-15]和所建立的评价等级隶属度函数,可以得到评价矩阵。机床的动态性能部分参数见表5。

表5 机床的动态性能部分参数
可以认为:进给系统的固有频率值远离节点频率才能避免发生共振,以减小共振对加工质量的影响。所谓的节点频率是指在实际加工过程中激振频率的相对固定的值,常见的节点频率一般包括:进给系统电机频率、主轴电机频率、主轴电机频率2、3、4倍。表6为机床的固有频率值和节点频率值。

表6 固有频率和节点频率
表中数据属于不同的类型,数量级不同,需要进行无纲量化处理。正向指标一般是指标值越大越好,逆向指标是指指标越小越好,适度指标是指指标值越趋近某个固定值越好。其中:跟随误差、超调量、调整时间、上升时间、峰值时间、X、Y、Z向平均振幅属于逆向指标。1阶、2阶、3阶、4阶频率属于适度指标。
逆向指标的无纲量化公式为:
(10)
适度指标的无纲量化公式为:
(11)
采用5级模糊隶属区间作为区分指标优劣的状态,建立如下指标对应的评价等级隶属度函数:
(12)
由隶属度函数得到指标的评价向量,如表7所示。
3.5 综合性能评价
根据公式(9)进行评价分析,并根据最大隶属度原则判断指标的等级。
指标固有频率B11最终评价向量:YB11=(0.1366 0.0925 0.1810 0.3416 0.2464),由评价向量可知,固有频率的评价等级为“较差”,隶属度为34.16%;指标振幅B12最终评价向量:
YB12=(0.2316 0.4917 0.1786 0.0644 0.0317),由评价向量可知,振幅的评价等级为“良好”,隶属度为49.17%;指标抗振性A1最终评价向量:
YA1=(0.1841 0.2921 0.1798 0.2030 0.1391),由评价向量可知,抗振性的评价等级为“良好”,隶属度为29.21%;指标瞬态响应性A2最终评价向量:
YA2=(0.2492 0.3635 0.2507 0.0956 0.038),由评价向量可知,瞬态响应性的评价等级为“良好”,隶属度为36.35%;总指标A总最终评价向量:
YA总=(0.2167 0.3278 0.2153 0.1493 0.0886),由评价向量可知,机床的综合动态性能评价等级“良好”,隶属度为32.78%。
从评价结果可知,机床进给系统的动态特性综合评价为良好。其中,固有频率的评价等级为“较差”,其他子指标的等级为良好。可见整体的动态特性还有可改进之处,进给系统固有频率与节点频率的差值过小,容易导致加工中的共振。为获得更好的动态性能,应首先从此处着手改进优化。

表7 评价向量
4 结论
本文运用直觉模糊层次分析法,从抗振性和动态响应性两个方面建立了机床进给系统动态特性评价体系,主要得到以下结论。
(1)通过建立隶属度函数的方法可以消除人为主观因素造成的影响,当评价指标的参数发生变化时,根据评价等级隶属度函数可以得出对应的评价矩阵,可重复性好。
(2)将固有频率当做适度指标,更加符合实际工况,评价更加科学合理。同时可以根据子指标的优劣,进行优化改进。
[参考文献]
[1] 良辰.我国高档数控装备发展中应重点关注的问题[J].航空制造技术,2013,1(2):65-67.
[2] 丁文政,汪木兰,朱松青,等.高档数控机床动态性能的评价研究[J].机床与液压,2014,42(23):34-37.
[3] 张广鹏,黄玉美.一种机床动态特性的模糊评价方法[J].制造技术与机床,2001,1(3):14-16.
[4] 刘世豪,叶文华,唐敦兵,等.基于层次分析法的数控机床性能模糊综合评判[J].山东大学学报,2010,40(1):68-73.
[5] 王宇,汪永超,牛印宝,等.基于模糊层次分析法的数控机床设备优化选择[J].组合机床与自动化加工技术,2014(1):133-136.
[6] 朱传军,叶仲新,常治斌.机床设备选择的评价体系研究[J].湖北汽车工业学院学报,2007,21(2):48-52.
[7] 邵新宇,李培根.机床设备选择的多级模糊综合评判模型[J].华中理工大学学报,2000,10(2):1-3.
[8] 米长富,田建平,杨海栗,等.基于模糊综合评判的机床设备选型研究[J].组合机床与自动化加工技术,2012,7(5):109-112.
[9] Buckley J J. Fuzzy hierarchical analysis [J].Fuzzy Sets Systems,1985,3(17):233-247.
[10] Xu Zeshui. Intuitionistic preference relation and their application in group decision making [J], information sciences,2007,177(11):2363-2379.
[11] Xia Meimei, Xu Zeshui, Liao Huchuan. Preference relations based on intuitionistic multiplicative information [J].IEEE Transaction on FuzzySystems,2013,3(20):113-133.
[12] Szmdit E, Kacprzyk J. Amount of information and its reliability in the ranking of Atanassov’s intuitionistic fuzzy alternatives [M].Rakus-Adersson E ,Yager RR, Ichalkaranjie N, et al.Recent advances in decision making. Berlin: Springer,2009.
[13] Xu Zeshui, Liao Huchuan. Intuitionistic fuzzy analytic hierarchy process [J].IEEE Transaction on Fuzzy Systerms,2012,22(4):749-761.
[14] 罗进生,袁喜林.模糊PID控制在伺服系统中的应用[J].机床设计与制造,2013,5(3):229-234.
[15] 何家远.基于PMAC的直线电机伺服系统动态性能研究[D].南京:南京航空航天大学,2013.
(编辑李秀敏)