舰载光电跟踪设备目标捕获方法研究
2018-04-16顾吉堂闫晓珂
顾吉堂 闫晓珂
(91404部队 秦皇岛 066000)
1 引言
舰载光电设备集光机电为一体,具有实时性好、跟踪精度高、清晰的图像显示和抗干扰性强等功能,在海上准确测量、火控武器的精准打击、海上激光武器对抗、导弹和飞行器预警及轨迹预测、舰载机的起飞与降落等领域起着至关重要的作用[1]。随着飞行器、导弹等的飞行速度、机动性和目标打击的精准性不断提高,对舰载光电设备的性能提出了更高的要求。但光电跟踪设备光学视场小,自主捕获能力较弱、并且受到云层遮挡后,目标在成像视场内易丢失[2~3],在靶场试验和实战中快速、准确地搜索捕获目标对装备操作手来说难度较大。当前,目标遮挡丢失后普遍采用速度保持搜索方法,即按照目标先前的速度维持跟踪直到再次捕获目标,这种方法所能取得的效果非常有限。因为目标运动速度只能在短时间内认为恒定,随着遮挡时间的增大,目标将越来越偏离其恒速轨迹,再次发现捕获目标的概率也就越来越低。另一种搜索方法是在目标长时间丢失后,在目标要飞过的预定区域设置拦截点凝视等待捕获目标。这种方法在目标探测区间较小或拦截点误差较大时,目标发现捕获概率将变低[4~5]。鉴于这些不足,本文基于外引导数据提出了一种空间目标的快速捕获方法,消除了船体位置移动和姿态摇晃所带来的误差,通过剔除野值、延时外推、坐标转换实现了目标的快速捕获;通过分析拦截点警戒线搜索方法的原理,给出目标长时间丢失且缺乏引导信息时的警戒线搜索流程;最后通过试验结果的对比分析验证方法的有效性。
2 外引导数据实时处理方法
通过外引导信息辅助进行目标捕获是舰载光电跟踪设备捕获目标的主要手段[6]。由于舰载平台本身的位置移动、姿态晃动以及跟踪设备实时性需求,在坐标变换过程中要求消除船体位置移动和姿态摇晃所带来的误差,并进行真值外推和剔野处理。
2.1 剔除野值
根据莱特准则[7],当测量值服从正态分布时,残差落在3倍方差 [-3σ,3σ]区间,即||xi-xˉ>3σ ,xi为野值的概率超过99.7%,落在此区间外的概率只有不到0.3%,可以认为残差落于该区间之外的数据为野值。由于野值会对数据标准差求取精度产生影响[8],因此,莱特准则一般需要循环进行,即在一次野值剔除后的引导数据基础上,重新计算均值,并重新求取标准差σ,再次进行野值剔除,直到得到满意的结果为止。
2.2 轨迹预测
考虑到拟合的实效性和准确性,采用在直角坐标系下利用有效目标点进行最小二乘曲线拟合的方式。
求一简单拟合曲线y=φ(t)使之在整体上尽可能与原始数据曲线近似,则

式中 yi为观测值,δi成为拟合曲线φ(ti)在t时刻与观测值 yi的偏差,最小二乘原则选择在节点ti处与观测目标位置偏差的平方和最小的拟合曲线φ(ti)为

将式(2)分别对 a、b、c求偏导,求得方程y=ati2+bti+C的系数a、b、c,从而可以通过该曲线方程外推目标ti时刻的位置。
2.3 引导数据的坐标变换
坐标系是空间数据的基准,坐标变化是使引导数据转换成能够驱动光电跟踪伺服系统的数据,不同的坐标系定义不同[9~10],之间相互转换的方法也不同,坐标转换流程图如图1所示。由于文章篇幅有限,具体过程不再赘述。
3 拦截点运动目标搜索捕获
拦截点目标搜索是指在目标要飞经的区域通过设置拦截点搜索目标的过程。对于云层背景下目标跟踪,当目标被云层遮挡后长时间丢失且又缺乏引导信息时,采用拦截点目标搜索是重新捕获目标的一种方法[11]。本文提出拦截点精度不高时目标搜索方法。
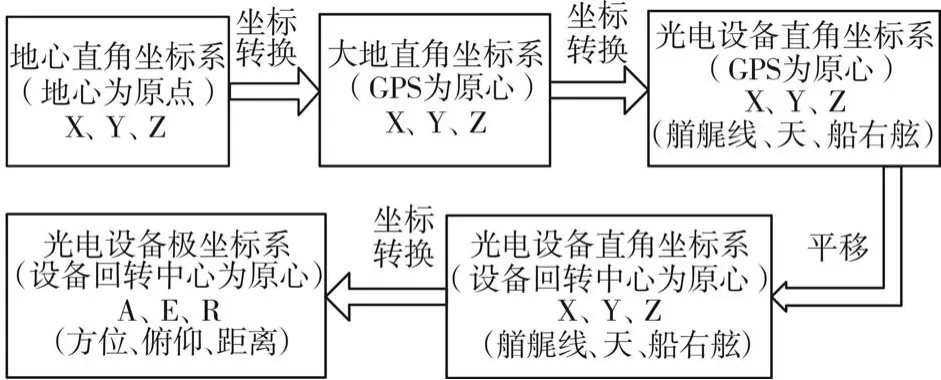
图1 坐标转换流程图
在拦截点进行目标搜索时,假设拦截点的理论位置为Pc,由于目标飞行中各种误差以及飞行环境因素的影响,虽然目标经过时的实际位置Po无法确知,但是可以合理设定Po将落入以Pc为中心d×d小区域内,并且服从均匀分布,如图2所示。
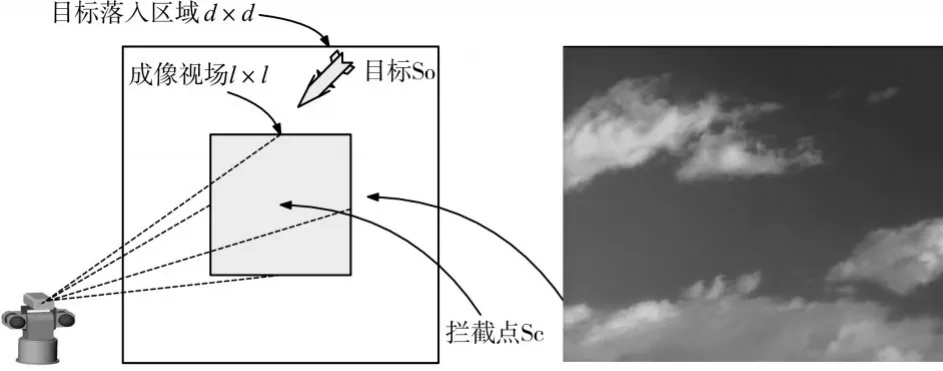
图2 目标经过拦截点过程
假设成像视场大小为l×l,目标检测概率为1,如果采用凝视等待捕获方法,目标搜索成功概率为

显然,如果目标拦截点的误差区域增大或成像视场变小,目标搜索成功概率呈正比下降。为了进一步提高搜索成功概率,这里采用警戒线的搜索方法,该方法的基本思想是假定目标必然穿越经过拦截点的警戒线,此时将搜索资源集中在警戒线上,而不在误差区域内搜索,由此提高搜索效率。警戒线搜索过程如图3所示。
从图中可以看出,警戒线搜索是沿“回”字形状路线往复搜索的过程,假设目标以速度矢量v0匀速经过警戒线(警戒线长度为D),方向与矢量v0方向垂直。搜索速度vd为矢量v0和vh的合成,其中vh为设定的沿警戒线搜索速度。如果以目标为参考点,搜索路线则是与目标运动方向正交的一连串平行航线,如图3(b)所示。光电跟踪设备进行一次搜索时,所需的时间t为

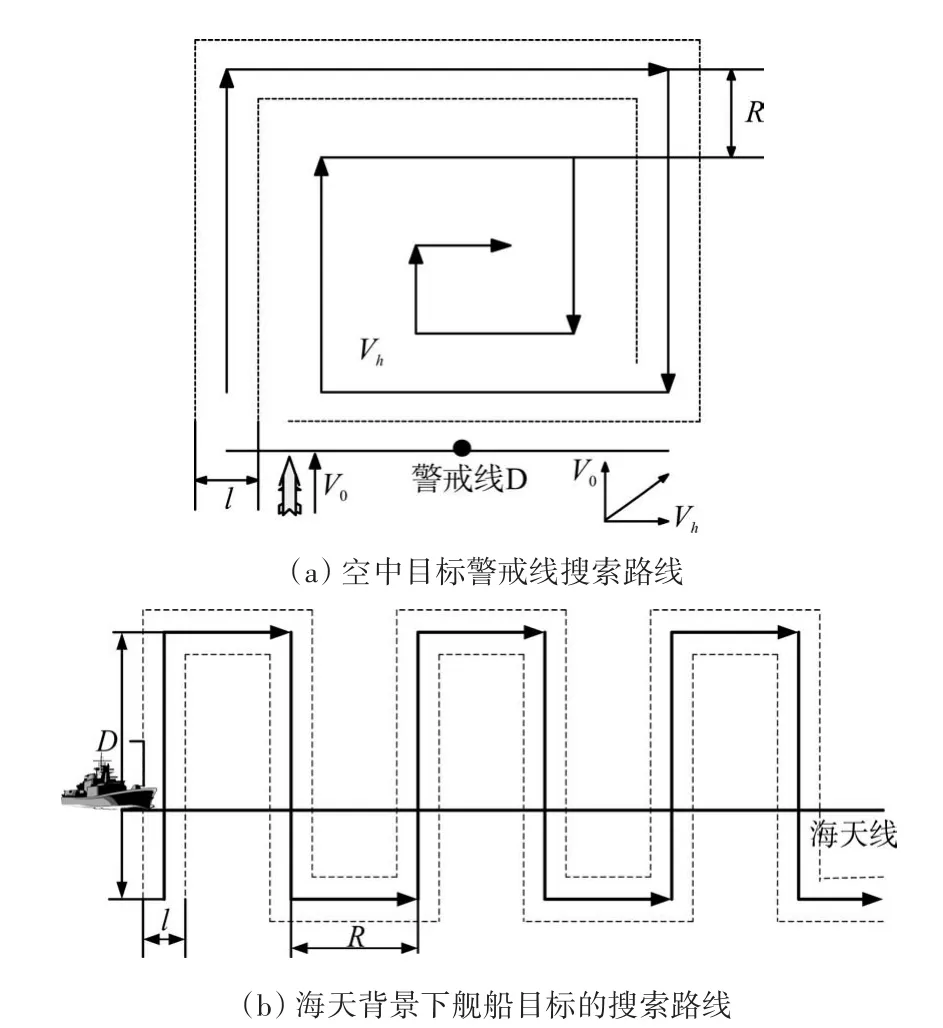
图3 警戒线搜索过程
此时回转路程R为:

由于目标在何处以及何时穿越警戒线未知,可以认为一次搜索过程中目标将均匀出现在R×D的区域内,因此目标搜索成功概率为

比较式(3)和式(6)可以发现,在拦截点误差较大或成像视场较小的情形下,如果警戒线长度设置成 D=2d,则当>条件满足时,警戒线搜索方法的目标搜索成功概率要高于凝视等待捕获方法;特别是当>时,警戒线搜索方法的目标搜索成功概率达到1,而这些条件在实际中容易得到满足。因此,在拦截点处采用警戒线目标搜索可以取得很好的搜索效果。
4 应用分析
对上述外引导数据进行处理后,应用于某舰载光电跟踪设备,光电跟踪设备跟踪视场1.8°×1.5°,因此控制中心引导数据经过处理后必须能够将目标引入光电跟踪设备跟踪视场才能捕获跟踪目标。某舰载光电跟踪设备采用本文提出的引导数据实时处理方法,能够快速引导光电跟踪设备捕获并跟踪目标。事后对光电设备跟踪目标测量数据与中心引导数据进行精度对比分析,由于中高空目标与低空目标对于舰载光电跟踪设备捕获能力和跟踪精度有一定的差别,分别对舰载光电跟踪设备中高空目标和低空目标的数据进行对比分析。从引导数据与光电跟踪测量数据比对分析,中心引导数据通过本文提出的方法进行处理后,实时方位角与俯仰角误差均小于0.04°,小于舰载光电跟踪设备红外视场角,能够满足光电跟踪设备捕获条件。图4为引导数据与跟踪设备测量数据误差对比曲线图。从图中可以看到,光电跟踪设备在20km处成功截获目标,并稳定跟踪,分别在9km、5km处由于云层遮档等原因丢失目标后又成功截获目标;另外,引导信息经过处理后实时提供给舰载光电跟踪设备作为目标指示,其精度完全满足光电跟踪设备的测量要求,进一步验证了本文基于外引导数据提出的空间目标快速捕获方法是有效可行的。
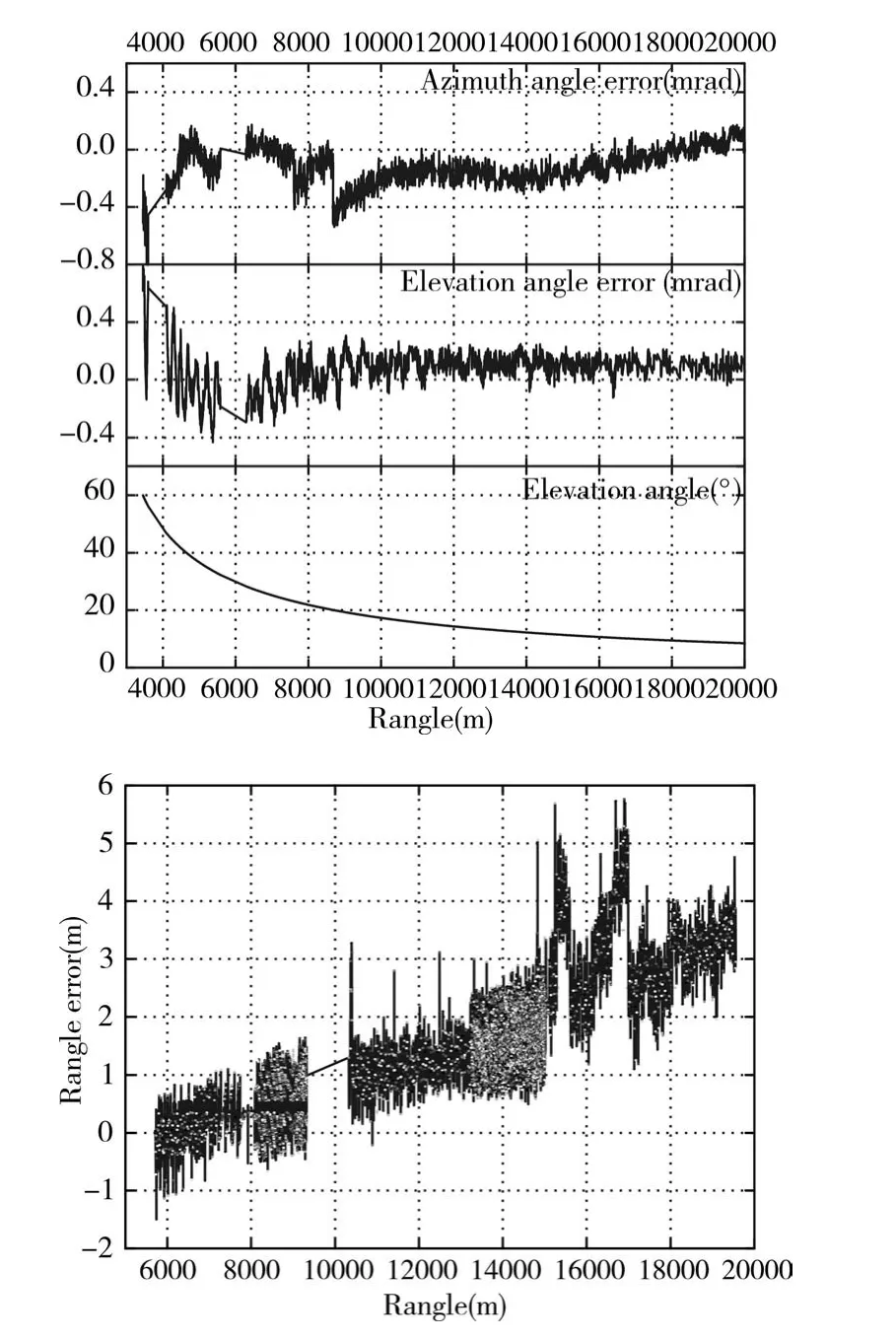
图4 引导数据与跟踪设备测量数据误差对比曲线图
5 结语
本文对外引导数据实时处理方法进行简分析,以空间飞行目标丢失后需快速截获目标为需求,提出了一空间目标的快速捕获方法。通过分析拦截点警戒线搜索方法的原理,并给出目标长时间丢失且缺乏引导信息时的警戒线搜索流程;最后通过试验结果的分析验证方法的有效性。
[1]张艳.提高舰载光电设备跟踪精度的关键技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2013.ZHANG Yan.Study on Key Technology for Improve Tracking Accuracy of Ship-based Optoelecrionic Equipment.Changchun:Institute of Optics, Fine Mechanics and Physics Chinese Academy of Sciences,2013.
[2]刘蛟龙,尉建利,于云峰.弹道导弹自由段拦截窗口建模与仿真[J].指挥控制与仿真,2012,34(6):72-76.LIU Jiaolong,WEIJianli,YU Yunfeng.Modeling and Simulation of TBM Midcourse Phase Interception Window[J].Command Control&Simulation,2012,34(6):72-76.
[3]刘翔.舰载光电跟踪视轴稳定技术[D].合肥:中国科技大学,2013:13-16.LIU Xiang.Technology of Line- of -sight(LOS)Stabilization forb Ship-based Photoelectric Tracking[D].Hefei:University ofChinese Academy ofSciences,2013:13-16.
[4]霍金明.光电跟踪设备低对比度目标捕获能力检验方法研究[D].长春:长春光学精密机械与物理研究所,2013:1-4.HUO Jinming.Assessment Method Study of Low Contrast Target Acquisition Ability for Photoelectric Tracker[D].Changchun:Changchun Institute of Optics Fine Mechanicsand PhysicsChinese Academy of Sciences,2013:1-4.
[5]BahadirKarasulu.SerdarKorukoglu,Moving object detection and tracking byusing annealed background subtraction method in videos Performance optimization[J].ExpertSystemswith Applications39(2012)33-43.
[6]温会锋,张增强.基于3σ法的卫星共视时间传递算法设计[J].航空计算技术,2016,46(3):98-99.WEN Huifeng,ZHANG Zengqiang.Satellite Commonview Time Transfer Algorithm Based on 3σ Method[J].AeronauticalComputing Technique,2016,46(3):98-99.
[7]李倩伟,唐丙寅.基于大数据分析的移动对象轨迹预测方法[J].计算机测量与控制,2016,24(10):199-201.LIQianwei,TANG Bingyin.Moving Object Trajectory Prediction Method Based on Large Data Analysis[J].ComputerMeasurement&Control,2016,24(10):199-201.
[8]朱学锋.基于模糊预测系统的观测数据野值剔除方法[J].系统工程与电子技术,2006,28(3):478-480.ZHU Xuefeng.New method for outlier removal from observed data basedon fuzzy forecasting system[J].Systems Engineering and Electronic,2006,28(3):478-480.
[9]戴勤奋.地理信息系统的坐标系定义[J].海洋地质,2002,18(6):24-27.Dai Qinfen.Coordinate System Definition of GIS[J].Marine Geology,2002,18(6):24-27.
[10]杨元喜,徐天河.不同坐标系综合变换法[J].武汉大学学报:信息科学版,2001,26(6):509-513.YANG Yuanxi,XU Tianhe.Comprehensive Transformation Method of Different Coordinate System[J].Geomatics and Information Science ofWuhan University,2001,26(6):509-513.
[11]叶露.光电跟踪设备低对比度目标捕获能力评价方法研究[J].光学学报,2012,32(11),1115001-1-5.YE Lu.Testing of low-contrast targetacquisition for photoelectric tracker[J].Acta Optica Sinica,2012,32(11),1115001-1-5.
