面向深空探测着陆过程中的陆标自动提取方法
2018-03-14陶江曹云峰丁萌庄丽葵张洲宇钟佩仪
陶江 曹云峰 丁萌 庄丽葵 张洲宇 钟佩仪
面向深空探测着陆过程中的陆标自动提取方法
陶江 曹云峰 丁萌 庄丽葵 张洲宇 钟佩仪
(南京航空航天大学,南京 210016)
基于光学图像的地形匹配导航方法是目前深空探测任务中实现精确着陆的一种主要方法,通过天体表面光学图像得到的陆标能够获取完备的探测器位置和姿态信息。因此,天体表面陆标提取技术是实现精确着陆的关键技术。为此,提出了一种陆标自动提取方法。首先,利用AKAZE特征检测子对天体表面图像进行多尺度特征点检测,该特征点对图像尺度变化、旋转都具有一定的鲁棒性;然后,引入密度聚类理论,结合DBSCAN聚类算法对AKAZE特征点进行聚类得到多个不同的聚类族;最后,通过设定阈值确定候选陆标和最终陆标,并提出了一种陆标提取性能评价方法。试验结果表明,该方法能够提取出具有较好的抗旋转性能和抗尺度变化性能的陆标特征,能为火星着陆过程中光学敏感器可能出现的多尺度、多视点变化带来的匹配鲁棒性差的问题提供相应的解决方案,对深空探测过程中实现精确着陆具有一定的参考意义。
特征检测 密度聚类 陆标提取 精确着陆 深空探测
0 引言
随着航天技术,如自主导航与控制技术、推进技术等技术的发展,深空探测成为当前世界航天领域发展的趋势[1]。其中,着陆实地探测是获取有价值的科学数据最直接有效的方式。在已成功实现着陆的深空探测任务中,探测器所采用的导航方式大多为惯性导航,但其误差会随时间增加而增大[2],因此后来出现了多传感器融合的导航方式,改善了导航定位的精度。特别是地形匹配导航(Terrain Relative Navigation,TRN)辅助惯性导航的组合导航方法在深空探测着陆任务中被越来越多的采用以提高着陆精度[3],如美国NASA近年来一直研究的ALHAT(Autonomous Landing Hazard Avoidance Technology)工程以及未来的“MARS2020”火星探测任务都将地形匹配导航作为主要的导航方式之一。地形匹配导航是指通过将安装在探测器上的激光雷达或光学相机在下降过程中所感知到的着陆区域地形特征与包含全局位置信息的着陆区域地形数据进行匹配,来获取探测器着陆过程中相对于着陆点的位置信息的导航方式[4]。由于激光雷达质量较大、构成复杂、技术相较于相机不够成熟等缺点[5],目前的研究多为基于光学图像的地形匹配导航。
文献[6]的几何可观性分析表明,当存在3个及3个以上的不共面方向矢量测量时,相机载体的位姿即可唯一确定。对于降落图像,当检测到至少3个不共线且位置已知的陆标时,即可根据几何关系确定着陆器位姿信息。因此,天体表面图像导航陆标特征的提取是实现地形匹配的前提也是基于光学图像自主导航关键技术之一[7]。2005年,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)在文献[8]将火星表面上大量存在的撞击坑作为陆标,并对其进行检测与匹配实现探测器实时定位,但是并不能保证每个着陆点附近都具有足够的撞击坑来保证着陆(如火星极地),并且撞击坑密度过大、模糊的边缘、撞击坑阴影等因素都会影响匹配性能。文献[9]用尺度不变特征转换(Scale Invariant Feature Transform,SIFT)来提取陆标,可以不依赖撞击坑等具有特定几何形状的地貌,然而该方法计算复杂,不满足着陆所需的实时性。文献[10]采用HARRIS检测子,能对任何具有丰富纹理的地形提取陆标(Mapped Landmarks,MLs),但是该算法不具备尺度不变性。为此,本文采用具有较好旋转不变性和尺度不变性且较为快速的AKAZE特征来作为提取陆标的特征点。
在实际的着陆任务中,由于降落相机所拍摄图像的地面分辨率单元(Ground Resolution Cell,GRC)不断变化,特别是着陆的初始阶段降落相机图像与卫星图像分辨率差异过大导致无法匹配,此时需要采用相关匹配进行着陆定位,相关匹配过程中的模板即为陆标。根据特征点制备陆标的传统方法为迭代搜索[11],首先基于HARRIS特征点提取出图像高对比度像素点,再迭代选出以高对比度像素点为中心的模板作为陆标。由于该方法需要事先划分网格,模板分布位置固定,使得提取的陆标无法准确反映图像的特征。为此,本文提出了一种基于密度聚类的陆标提取方法,实验结果表明,本文方法能够得到图像特征信息较为完备的陆标。
1 着陆过程中天体表面图像特性分析
1.1 深空探测着陆过程中的天体表面图像特点
深空探测着陆过程中,探测器通常会面临严峻的着陆环境,如火星复杂多变的气候,小行星较低的引力,月球表面遍布的撞击坑等,都会对探测器着陆造成严重的影响。特别是着陆过程中探测器的高度、姿态变化范围大,导致探测器所载光学敏感器获取的天体表面图像尺度、视点变化范围大,给导航陆标特征提取带来困难进而影响后续的陆标匹配定位。因此,本文从图像尺度变化和视点变化的角度考虑,结合目前特征点检测算法研究的新进展,找到一种抗尺度变化、抗旋转变化性能较好的特征检测算法。此外,由于导航陆标的提取发生在地形匹配导航阶段[7,10-11],而在该高度范围内的天体表面图像通常呈现大尺度地貌特征[12],也即预选着陆区域的地貌特征,而着陆点附近往往选在地形地貌复杂的地方,如撞击坑、峡谷、槽沟,因为具有科学价值的地方一般是地貌特征较为丰富的地方[13]。而这些地貌特征的所呈现的图像都具有纹理丰富的特点,有利于特征点的检测。
1.2 天体表面图像陆标表征

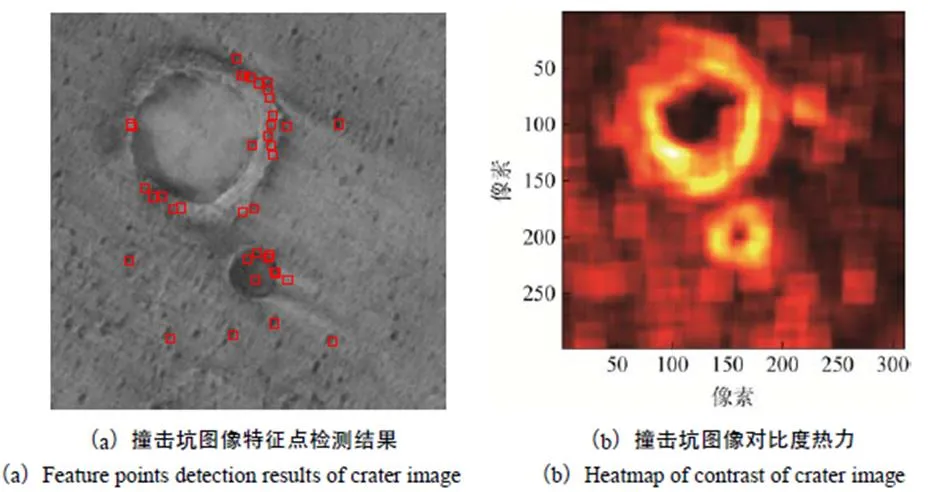
图1 特征检测及其对比度分布
1.3 陆标特征提取性能评估

2 AKAZE特征点检测算法
本文采用AKAZE特征检测算法得到的特征作为提取陆标的特征点,由文献[16]可知,该特征点检测算法具有非常优异的抗旋转变化和抗尺度变化性能。该算法通过将快速显式扩散(Fast Explicit Diffusion,FED)融入到金字塔框架,极大提高了非线性尺度空间中的特征检测的速度。AKAZE特征检测算法首先用FED建立非线性尺度空间,对于一个尺度空间有如下定义:

对滤波后的图像在非线性尺度空间计算Hessian矩阵,并对其归一化得到:

3 基于密度聚类的陆标自动提取算法
3.1 DBSCAN密度聚类原理
3.2 基于DBSCAN密度聚类的陆标提取方法
1)用AKAZE特征检测算法对降落相机图像检测得到特征点;
4 实验结果与分析
为验证本文方法的有效性和可靠性,选取了四种典型的地外天体地貌进行聚类分析。实验所用处理器平台为Intel(R) Core(TM) i7-4910 CPU@3.60GHz,在MatlabR2017a软件中进行仿真实验。
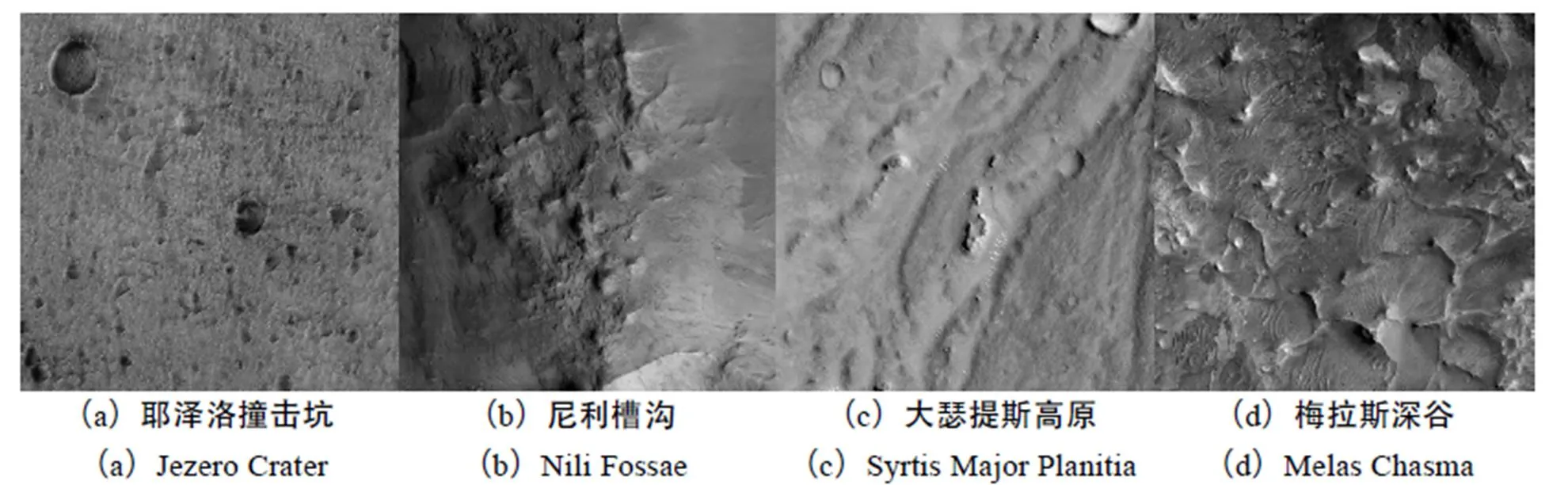
图2 着陆点四种典型地貌图像
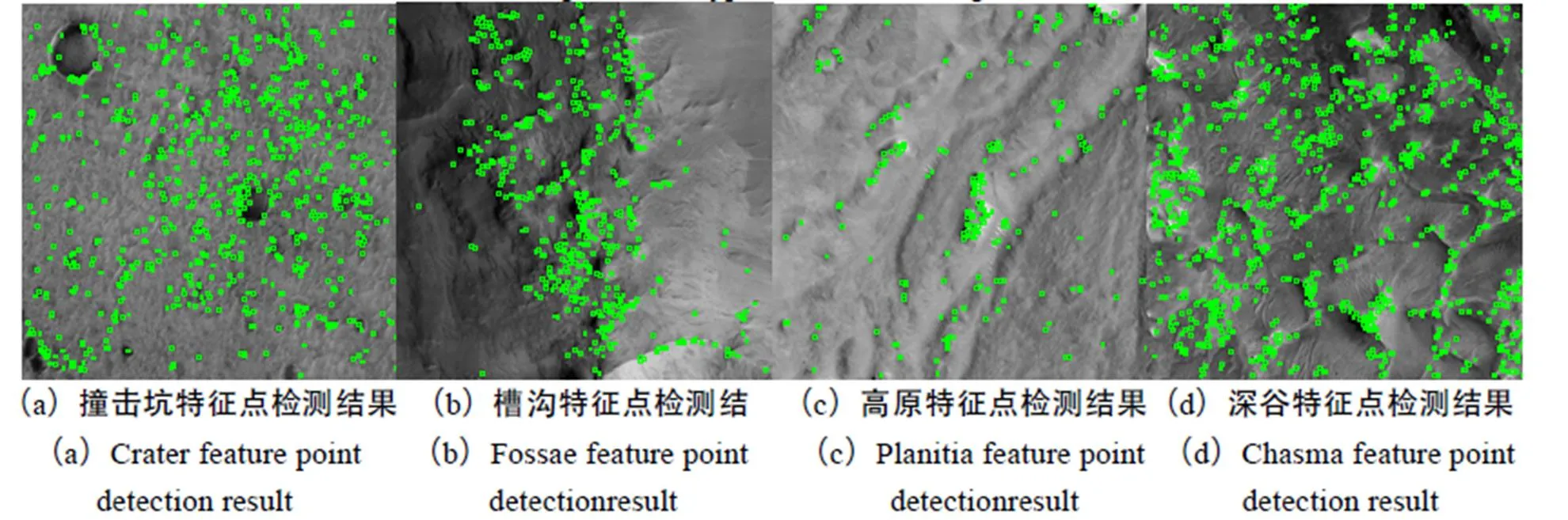
图3 着陆点图像特征点检测
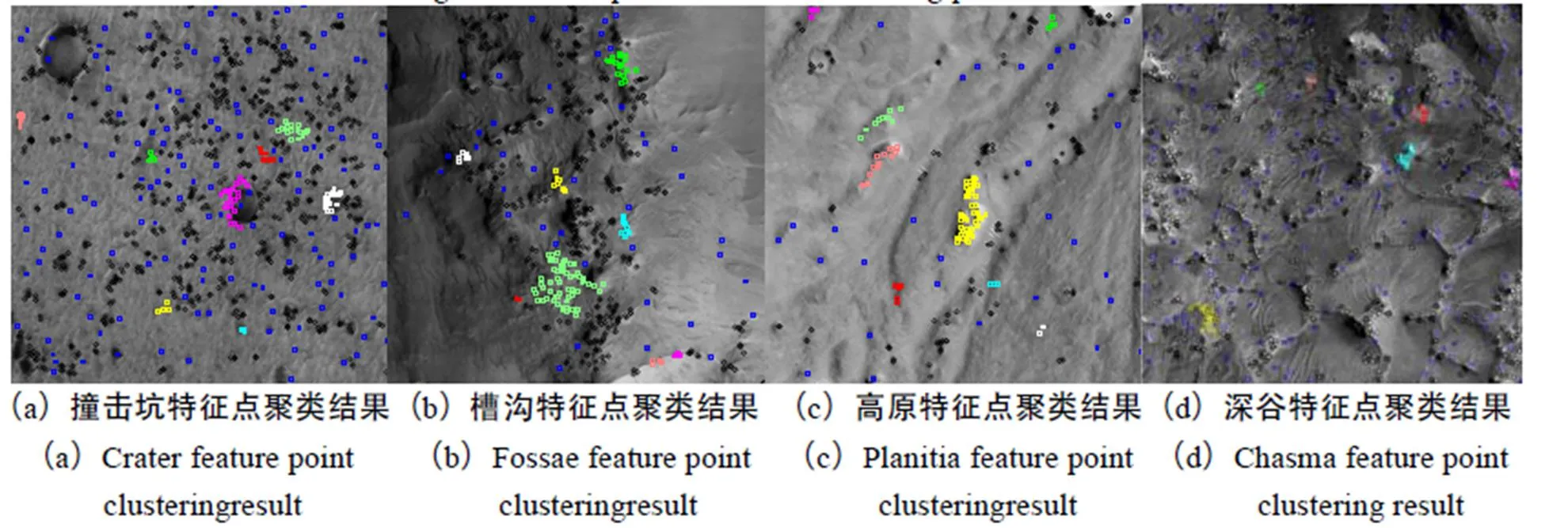
图4 着陆点图像特征点密度聚类
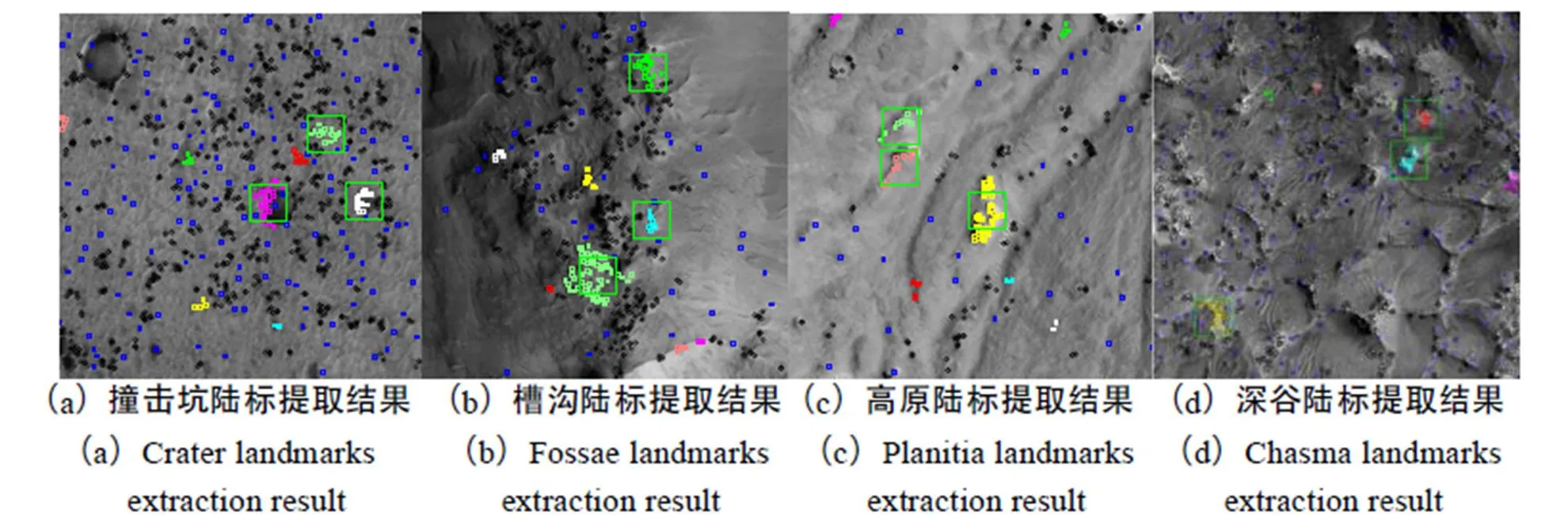
图5 着陆点图像陆标提取
为评估本文陆标提取方法的鲁棒性,对上述四种着陆点地貌图像分别进行尺度缩放和旋转变化,按照本文提出的陆标提取性能评价指标进行评估,尺度缩放倍数为0.1到3,间隔为0.1;旋转角度为0°到180°,间隔为5°。同时和传统的基于HARRIS角点特征得到的陆标进行对比,得到如图6和图7所示的评估结果。由图6可知,在地貌图像的尺度不断变大的情况下,对于撞击坑地貌本文陆标提取算法性能明显高于传统的基于HARRIS特征点的陆标提取算法。对于深谷地貌本文算法性能略高于后者,而槽沟地貌和高原地貌则差别不大。由图7可知,在地貌图像发生旋转的情况下,对于槽沟地貌本文算法性能明显高于传统算法,对于深谷地貌本文算法性能略高于传统算法,而对于撞击坑地貌和高原地貌,本文算法和传统算法无明显差别。故从总体上看,无论是抗旋转变化性能还是抗尺度变化性能,本文算法均优于传统的基于HARRIS特征点提取陆标的方法。
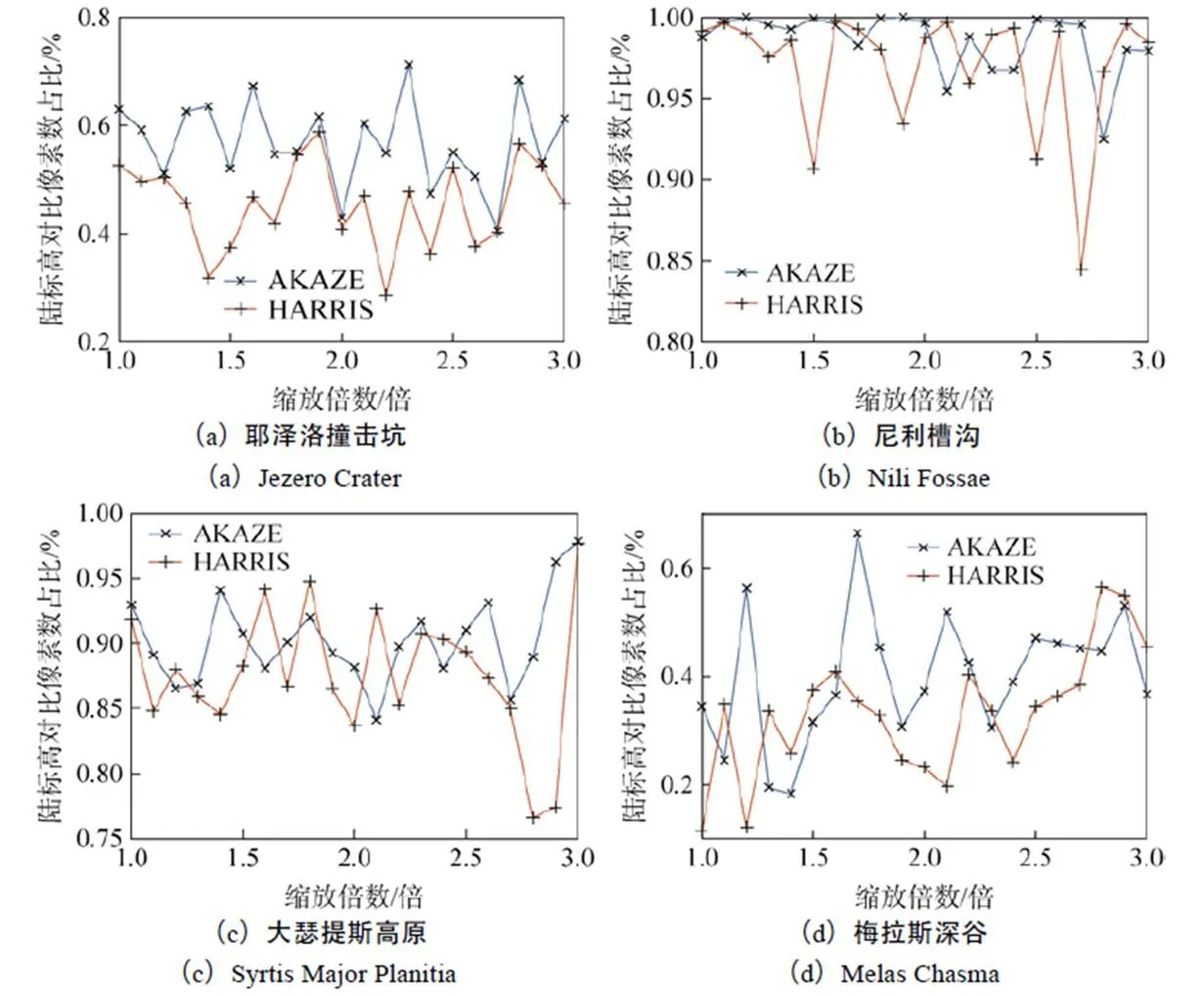
图6 尺度变化下陆标提取性能评估
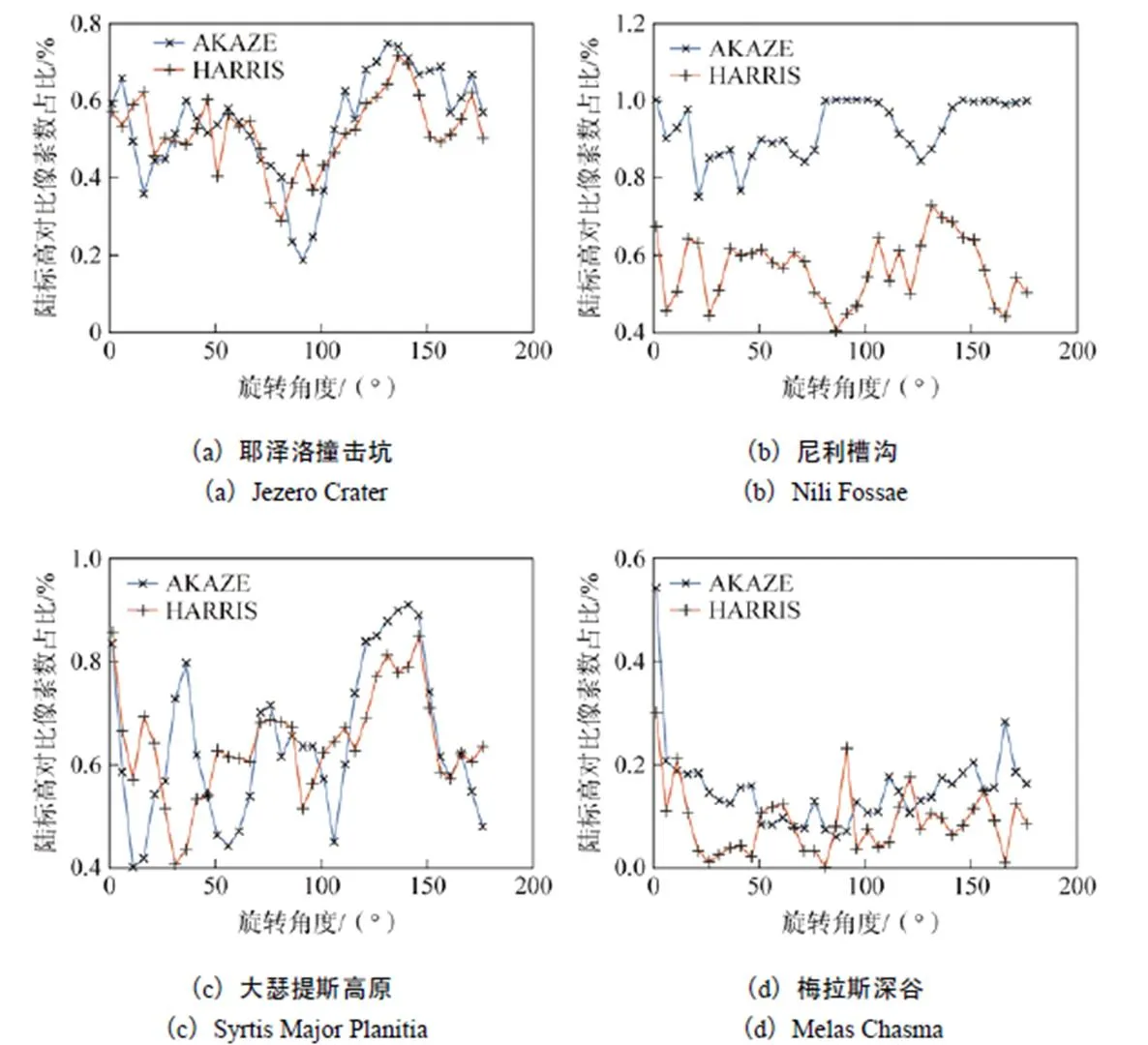
图7 旋转角度变化下陆标提取性能评估
5 结束语
本文通过对深空探测着陆过程中的地外天体图像的特点进行分析,将密度聚类思想引入陆标提取,提出了一种基于密度聚类的陆标自动提取方法,并选取了四种典型的着陆点地貌类型进行实验验证。此外,还提出了一种陆标提取性能评价方法,并利用该评价方法与将本文算法与传统方法进行对比实验。实验结果表明:本文的陆标提取方法具备较好的抗旋转变化和抗尺度变化性能,在四种着陆地貌类型的陆标提取性能均优于传统的基于HARRIS特征点的陆标提取方法。
[1] 孙泽洲, 孟林智. 中国深空探测现状及持续发展趋势[J]. 南京航空航天大学学报, 2015, 47(6): 785-791. SUN Zezhou, MENG Linzhi. Current Situation and Sustainable Development Trend of Deep Space Exploration in China[J]. Jounal of Nanjing Unicersity of Aeronautics & Astronautics, 2015, 47(6): 785-791. (in Chinese)
[2] 贾贺, 荣伟. 火星探测器减速着陆技术分析[J]. 航天器返回与遥感, 2010, 31(3): 6-14. JIA He, RONG Wei. Mars Exploration Deceleration Landing Technology[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(3): 6-14. (in Chinese)
[3] GONZALEZ F F. Terrain-relative Optical Navigation by Means of Monocular Visual Odometry[D]. Sweden: Lulea University of Technology, 2015: 26.
[4] STEINER T J, BRADY T M, HOFFMAN J A. Graph-based Terrain Relative Navigation with Optimal Landmark Database Selection[C]//2015 IEEE Aerospace Conference, 2015: 1-12.
[5] JOHNSON A E, MONTGOMERY J F. Overview of Terrain Relative Navigation Approaches for Precise Lunar Landing[C]//Aerospace Conference, 2008: 1-10.
[6] SUN D, CRASSIDIS J L. Observability Analysis of Six-degree-of-freedom Configuration Determination Using Vector Observations[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(6): 1149-1157.
[7] 王大轶, 徐超, 黄翔宇. 深空探测着陆过程序列图像自主导航综述[J]. 哈尔滨工业大学学报, 2016, 48(4): 1-12. WANG Dayi, XU Chao, HUANG Xiangyu. Overview of Autonomous Navigation Based on Sequential Images for Planetary Landing[J]. Journal of Harbin Institute of Technology, 2016, 48(4): 1-12. (in Chinese)
[8] CHENG Y, ANSAR A. Landmark Based Position Estimation for Pinpoint Landing on Mars[C]//IEEE International Conference on Robotics and Automation. IEEE, 2006: 1573-1578.
[9] TRAWNY N, MOURIKIS A I, ROUMELIOTIS S I, et al. Vision-aided Inertial Navigation for Pin-point Landing Using Observations of Mapped Landmarks[J]. Journal of Field Robotics, 2010, 24(5): 357-378.
[10] MOURIKIS A I, TRAWNY N, ROUMELIOTIS S I, et al. Vision-aided Inertial Navigation for Spacecraft Entry, Descent, and Landing[J]. IEEE Transactions on Robotics, 2009, 25(2): 264-280.
[11] JOHNSON A E, CHENG Y, MONTGOMERY J, et al. Design and Analysis of Map Relative Localization for Access to Hazardous Landing Sites on Mars[C]//AIAA Guidance, Navigation, and Control Conference. 2016: 3-5.
[12] ALEXANDER J, CHENG Y, ZHENG W, et al. A Terrain Relative Navigation Sensor Enabled by Multi-core Processing[C]//Aerospace Conference, 2012 IEEE. IEEE, 2012, 186(6): 1-11.
[13] ACIKMESE B, CASOLIVA J, CARSON J M, et al. G-fold: A Real-time Implementable Fuel Optimal Large Divert Guidance Algorithm for Planetary Pinpoint Landing[J]. Concepts & Approaches for Mars Exploration, 2012, 1679(43): 4193.
[14] STEINER T J, BRADY T M, HOFFMAN J A. Graph-based Terrain Relative Navigation with Optimal Landmark Database Selection[C]//Aerospace Conference, 2015: 1-12.
[15] SOUBANNAVONG F, LEMARECHALC, REMETEAN, et al. Visual Odometry for Autonomous Localization on Mars[J]. European Journal of Teacher Education, 2008, 32(113): 65-66.
[16] ALCANTARILL P F, SOLUTIONS T V. Fast ExplicitDiffusion for Accelerated Features in Nonlinear Scale Spaces[C]//British Machine Vision Conference, 2013: 13.1-13.11.
[17] WEICKERT J, ROMENY B M T H, VIERGEVER M A. Efficient an D Reliable Schemes for Nonlinear Diffusion Filtering[J]. IEEE Transactions on Image Processing, 1998, 7(3): 398-410.
[18] 周志华. 机器学习[M]. 北京: 清华大学出版社, 2016: 211-212. ZHOU Zhihua. Machine Learning[M]. Beijing: Tsinghua University Press, 2016: 211-212. (in Chinese)
[19] CAMPELLO R J G B, MOULAVI D, SANDER J. Density-based Clustering Based on Hierarchical Density Estimates[C]//Pacific-Asia Conference on Knowledge Discovery and Data Mining, 2013: 160-172.
[20] LISTED N. Planning for Mars Returned Sample Science: Final Report of the MSR End-to-end International Science Analysis Group (E2E-iSAG)[J]. Astrobiology, 2012, 12(3): 175-230.
(编辑:刘颖)
Land Mark Automatic Extraction Algorithm for Planetary Landing
TAO Jiang CAO Yunfeng DING Meng ZHUANG Likui ZHANG Zhouyu ZHONG Peiyi
(Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The terrain matching navigation method based on optical image is one of the main methods to realize accurate landing in deep space exploration task. The landmarks obtained by the celestial surface optical image can produce complete detector position and attitude information. Therefore, the extraction technology of the celestial surface landmark is the key technology to achieve accurate landing. To this end, a robust automatic method to extract roadmap is proposed in the paper. Firstly, the multi-scale feature points of the celestial surface image are detected using the AKAZE feature detector. The feature points have some robustness to the image distortion and rotation. Then, by introducing the density clustering theory and combining with the DBSCAN clustering algorithm, the AKAZE feature points are clustered to get a number of different clusters. Finally, the candidate signs and final landmarks are determined by setting thresholds. And then an evaluation method of landmark extraction performance is proposed. The experimental results show that this method have good anti-rotation and anti-scale performance in extracting the landmark characteristics, and can provide strong technical support for the multi-scale and multi-view changes that the optical sensor may appear during the landing on Mars, and it is of theoretical significance to realize the accurate landing in deep space exploration.
feature detection; density clustering; landmark extraction; accurate landing; deep space explore
V448.2
A
1009-8518(2018)01-0112-09
10.3969/j.issn.1009-8518.2018.01.014
陶江,男,1991年生,南京航空航天大学航天学院导航、制导与控制专业博士研究生。研究方向为深空探测。E-mail:tjnuaa@nuaa.edu.cn。
2018-01-06
国家自然科学基金(No. 61673211);中国运载火箭技术研究院高校联合创新基金