基于SVM的灌区无人机影像渠系提取
2018-03-13张宏鸣韩文霆杨江涛杨勤科
张宏鸣 任 强 韩文霆 杨江涛 杨勤科 张 炯
(1.西北农林科技大学信息工程学院, 陕西杨凌 712100; 2.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;3.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100; 4.西北大学城市与环境学院, 西安 710069;5.南加州大学神经影像学和信息学研究所, 洛杉矶 CA 90033)
0 引言
渠系作为最常见的输配水工程设施,根据形成原因,可分为人工渠系和自然渠系。针对不同渠系,采用的提取方法也不尽相同[1]。针对自然渠系,研究者提出从数字高程模型(Digital elevation model, DEM)中提取自然渠系轮廓[2],提取方法主要包括移动窗口算法[3]和全局法。
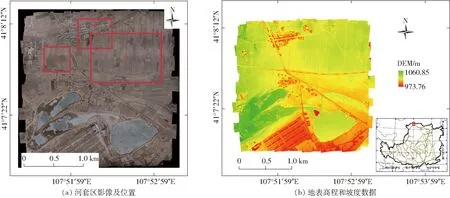
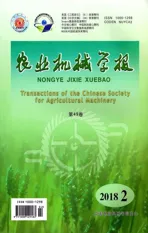
图1 研究区域影像及实验区位置、高程Fig.1 DOM and DEM data of study area
灌区灌排渠系属于人工渠系,呈线状分布,多为人为有计划的挖掘[4]。针对线状地物,如道路的提取已有大量研究,SAATI等[5]采用Network Snake模型实现道路提取。但灌区渠系与农田道路交叉分布,该类方法较难对二者进行有效区分。传统分类方法多使用单一DEM作为数据源[6],如RAPINEL等[7]采用面向对象的分析方法提取灌区渠系,但水体、植被的存在对结果影响较大。CAZORZI等[8]利用平滑后的DEM与原始DEM得到相对地形模型,设置一定阈值来获取渠系轮廓信息,但该方法会产生额外的地形冗余信息。SAH等[9]基于DEM提出了一种通过汇流累积提取渠道轮廓的方法,所得到的原始水系序列对应的栅格数据(Raw stream order raster,RSOR)比使用常规的阈值法更接近真实地貌,但渠系连续性较差。SCHWANGHART等[10]根据水文原理,使得DEM边缘的排水连通性得到保障,但结果中仍存在一定的误差。BROERSON等[11]基于原始点云数据对平面和工程景观中的水道进行分类,进而识别水道。而该方法有效性受限于研究区的地表特征(如植被覆盖)。韩文霆等[12]使用基于面向对象的特征组合分类分层方法提取灌区渠系,该方法提取结果中易出现中断及无法区分农田道路等问题。张宏鸣等[13]基于DEM采用改进的霍夫变换方法对灌区渠系进行提取,并且在特征较为明显的大范围区域取得了良好的渠系网络提取效果,但受数据源和噪声点的影响,提取精度有限。前人研究过程常使用DEM或地形特征方法,数据源单一,方法较为传统,自动化程度低。
随着人工智能的发展,使通过机器学习的方法进行训练从而获得高精度分类成为可能。近年,基于支持向量机(Support vector machines,SVM)的分类检测方法在特征提取和目标识别等方面得到了广泛的应用[14-15]。农田沟渠与线状道路具有一定的相似性,均属于线状延伸结构。因此,本文尝试采用基于SVM的分类检测算法进行灌排渠系的识别提取。
本文在前期研究的基础上[13,16],避免使用单一数据源所带来的缺点,将无人机正射影像、DEM及坡度信息相结合来构建训练数据,基于SVM训练分类得到渠系和非渠系结果,并采用连通区域法和凸包化方法优化结果,最后进行噪点剔除和渠系断线连接。
1 数据与方法
1.1 数据来源
研究区位于内蒙古自治区西部临河区海丰县,黄土高原北部,属黄河上游的河套灌区,地面开阔平坦,灌区内灌排系统纵横。年平均降水量155 mm,因降水量低,使得灌区灌溉占主导地位,每年约有5.2×109m3黄河水灌溉农田[17]。为减小实验区地表覆盖物的影响,本研究使用AF1000型无人机于2016年3月份对河套灌区(图1a)冻土期进行数据采集,使用AgisoftPhotoscan软件生成分辨率为0.25 m的地表高程数据和坡度数据(图1b)。
为验证本文方法的准确性和适用性,从研究区中选取土地利用情况不同的3块区域。实验区1约为67.9万m2(图2a),该区域中Y型支渠特征明显,田坎、田间小路等同谱异物的干扰较少,通过该区域来检验环境条件良好情况下本文方法提取渠系的准确性。实验区2截取约12.8万m2(图2b),该区域中包含沥青道路和田间土路,沥青道路从影像信息上看与渠系差异很大,且树木和阴影较多,道路部分被遮挡,而田间小路的影像、高程、坡度等信息与渠系差异不大,由同谱异物现象所带来的干扰较为严重。实验区3约为27.7万m2(图2c),该实验区域存在大面积的房屋干扰,渠道、田坎、田间小路分布杂乱,同时田间存在多处秸秆焚烧后的残留物,对影像信息也造成一定影响。可通过该区域验证本文方法在复杂环境下的适用性。
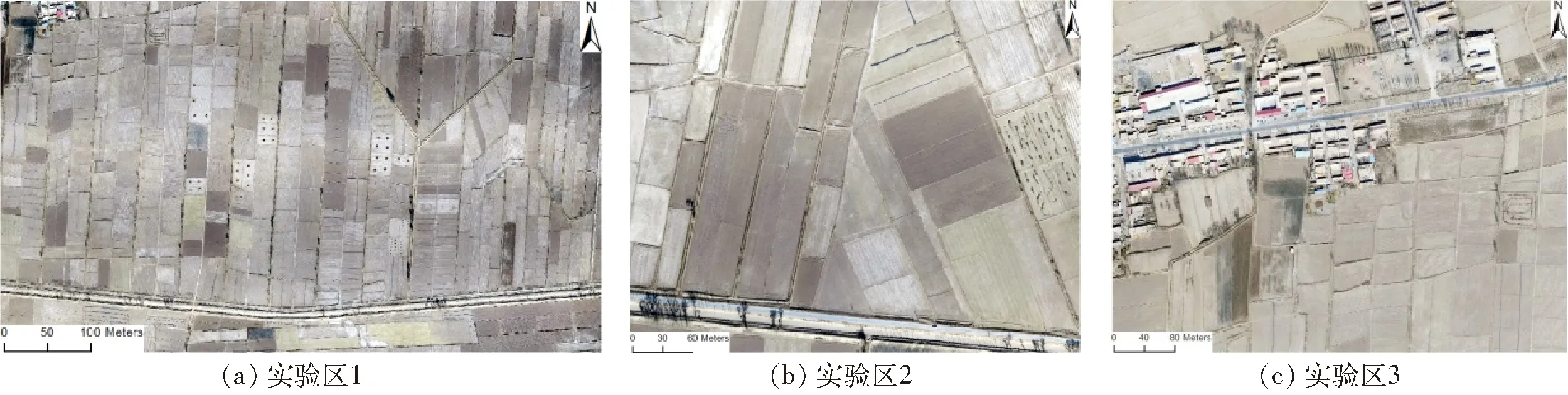
图2 各实验区域影像Fig.2 Images of each experiment area
1.2 原理与方法
基于单一数据源的渠系提取效果一般[13],因此本文将无人机正射影像、DEM及派生的坡度数据,存储成三维矩阵,通过比对,在3组数据上得到可信的训练样本点(人工选点),并使用SVM进行分类,其中多核基于超像素图像分割(Superpixels-based classficationvia mutilplekernels,SC-MK)算法为SVM提供核函数,用连通区域法和凸包化方法剔除噪声并进行断点连接,利用中轴线算法提取渠系中心线。算法流程如图3所示。
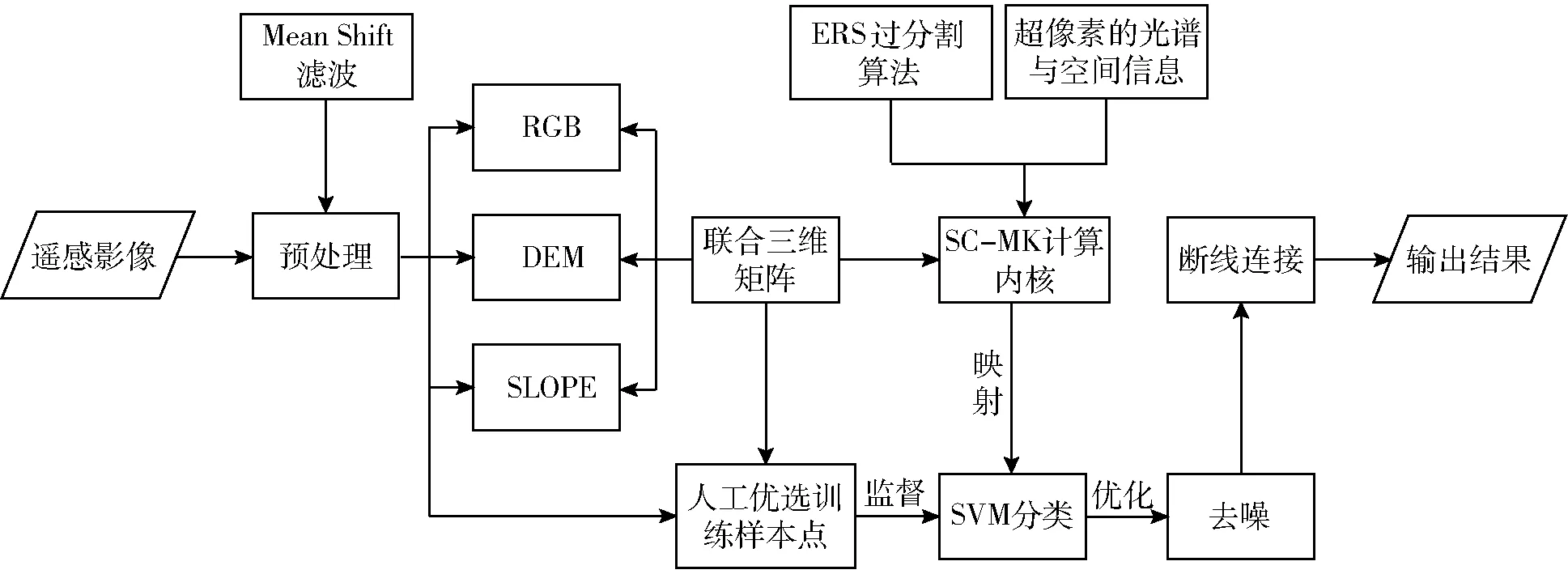
图3 本文方法的处理流程图Fig.3 Flow chart of proposed method
1.2.1SVM算法提取渠系
数据、训练样本和核函数是决定分类结果准确性的关键因素[18],因此基于SVM的渠系提取可分为3个步骤:
(1)影像预处理
对遥感图像进行Mean Shift滤波处理,计算像素点的概率密度,以合并相似的影像特征,在不损失目标信息的前提下,抑制图像噪声[19]。
以x为圆心,以h为半径,落在球内的点为xi点的概率密度为
(1)
式中s——空间域r——颜色域
C——概率常数
hs——空间域下的半径
xr——颜色域下的x像素点
hr——颜色域下的半径
xs——空间域下的x像素点
半径越大,越多的图像细节就会被忽略[23]。选取半径h为15,后期实验分类效果较好。
(2)训练样本选取
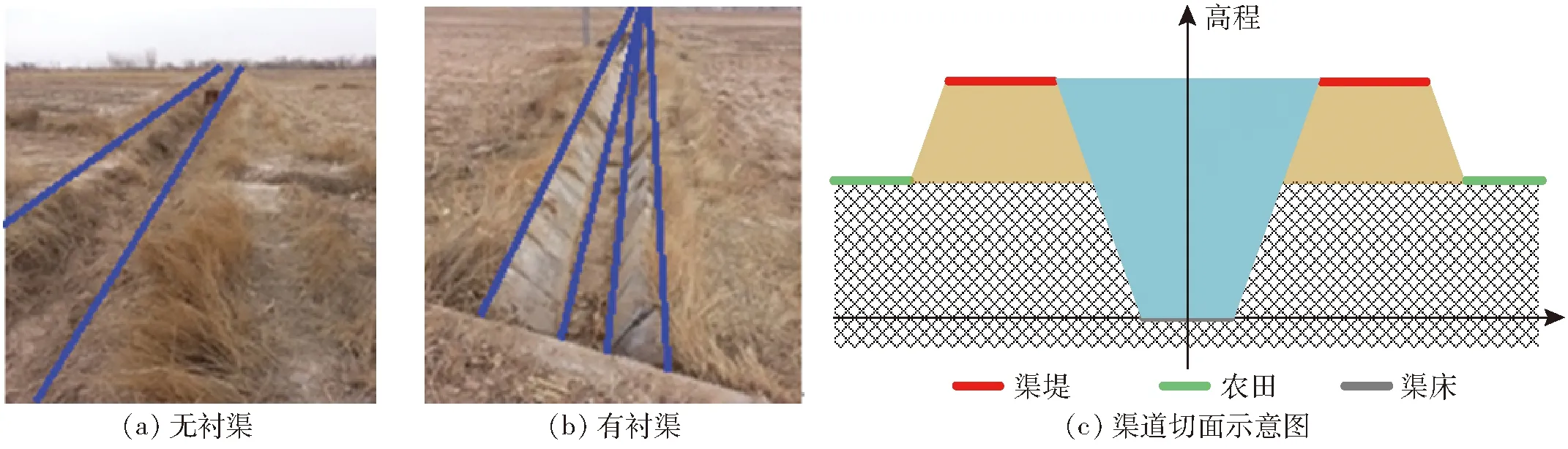
图4 渠道切面示意图及实地勘察图Fig.4 Schematic view of channel section and field survey maps
正射影像上,渠床与农田颜色较接近;高程上,渠床略低;坡度上,渠床与农田均趋于平缓。而渠堤在高程和坡度特征上与农田区域差异较大。研究区渠系可分为无衬渠系(图4a)和有衬渠系(图4b)两种,高程、坡度和渠系实地勘察图(蓝色线条)如图4所示,结合这些特点,实验过程中将渠堤和渠床同时作为目标取样点。
在监督分类之前,需采集足量的负样本点(非渠系样本点),实验采取等距采样法[20],采样距离视图像大小而定。但候选样本点存在落于渠系的可能,因此根据渠堤和渠床相比农田、道路会发生高程骤变的特点,去除高程变化较大的候选样本点,筛选出较为真实的负样本点,尽可能地降低对分类过程的不利影响。
(3)SC-MK算法生成核函数
SVM中采用传统的核函数在分类结果上表现出较多的干扰因素[21]。为了进一步提升分类效果,研究工作者试图将光谱与空间信息结合起来作为分类依据,SC-MK就是诸多研究工作的一种有效方法。本研究将正射影像、DEM、坡度3种数据结合形成的多维数据作为数据源。SC-MK算法主要分为3个步骤[22]:
(1)过分割(Entropy rate superpixel, ERS)。算法先对原始图像进行预处理,包括随机遍历图像并生成熵率以及平衡过程2部分。熵率倾向于生成紧密且均匀的簇类,同时平衡函数会促使每个簇类的尺寸趋于一致[23]。采用该算法高效准确地对原始图像进行过分割,为SC-MK算法的进行提供了条件。
(2)生成超像素。超像素的生成需要先求出超像素数目L,这取决于地形区域复杂程度,区域越复杂等待识别的单元格就越多。用R表示目标像素占总像素的比例,Lbase表示超像素的预设值,则超像素个数L为
L=LbaseR
(2)
根据超像素个数L,调用ERS算法,将原有的高分辨率图像分割生成L个超像素。
(3)生成特征信息图像。分割生成超像素后,需用矩阵YSPi来描述第i个超像素,才能生成特征信息图像,包括光谱信息图像ISpec、均值信息图像IMean、加权均值图像IWeigh。它们是计算内核的必要保障。
光谱信息图像ISpec用于描述超像素图像中原始的光谱特征信息,由全部光谱像素YSPi构成。设YSPi中共有z个像素,YSPi表示为
YSPi=[y1iy2i…yzi]
(3)
均值特征图像IMean的生成需要先根据YSPi计算每一个超像素中光谱信息的平均值yMeani,然后将yMeani的值赋给YSPi中的所有像素。新的均值特征图像IMean可以减少图像中的干扰信息。
加权均值特征图像IWeigh由每个超像素YSPi及其相邻的超像素进行平均加权计算得到。若YSPi共有J个邻接超像素,YSPi的邻接超像素为
YSPi,j=[YSPi,1YSPi,2…YSPi,J]
(4)
某一超像素光谱加权均值信息yWAi的计算,需要其所有邻接超像素光谱均值信息yMeani,j。光谱加权均值信息yWAi的计算公式为
(5)
其中
(6)
式中wi,j——邻接超像素的权值
h——一个预设的标量
将yWAi的值赋给超像素YSPi中的每一个像素,将赋值后的超像素集合生成加权均值特征图像IWeigh。
内核的生成需要特征信息图像结合训练样本得到各自对应的特征训练集合作为基础,具体过程是将选取出的训练样本点组合成训练集合(y1,y2,…,yN)。根据训练集合中的像素点对应坐标索引,找出光谱信息图像ISpec、均值信息图像IMean、加权均值图像IWeigh中对应的像素点,生成光谱信息训练集合(ySpec,Train1,ySpec,Train2,…,ySpec,TrainN)、均值特征训练集合(yMean,Train1,yMean,Train2,…,yMean,TrainN)、加权均值训练集合(yWeigh,Train1,yWeigh,Train2,…,yWeigh,TrainN)。根据3个训练集合,分别生成3个内核,计算公式为
(7)
其中σ为函数的宽度参数,控制函数的径向作用范围。
根据生成的3个内核KSpec、KIntraS、KInterS,联合3个内核采用加权平均值法计算出一个统一的内核,作为SVM最终的分类依据,计算公式为
KComSup(yi,yj)=
μSpecKSpec+μIntraSKIntraS+μInterSKInterS
(8)
其中,μSpec、μIntraS、μInterS表示3个内核生成统一内核时各自所占的权重,同时3个参数需要满足
μSpec+μIntraS+μInterS=1
(9)
将生成的混合内核KComSup作为SVM的分类准则,用来决定原图像中每个像素所属类别。训练过程中,正负训练样本数量均为200,可以有良好的训练效果及泛化能力。
SVM提取后仍存在一定的噪点和渠道断裂现象,因此需要去噪及渠系断点连接来进一步优化。
1.2.2渠系提取结果优化
1.2.2.1连通域标记算法剔除噪点
SVM方法提取出的渠系信息背景中仍存在一定噪点,影响渠系断线连接及结果。消除图像噪声常用的滤波和平滑方法会导致原本的渠系信息也一定程度的丢失,而采用连通区域分析法(Connected component analysis)进行区域标记时对原本目标渠系信息产生的弱化影响较小。连通区域(Connected component)一般是指图像中规定大小的相邻前景元素组成的具有相同像素数的一片区域。连通区域分析法需要将这些区域进行标记,如果符合要求,则将其做增强或者删除[24]。最终当区域个数小于阈值3时,默认为非目标渠系,将其重置为背景。从而达到一个较为理想的状态。
为计算连通区域个数,本文对4连通邻域进行标记处理,该标记思路为选取一个前景像素点作为种子,然后根据连通区域的2个基本条件,即像素数相同且位置相邻(上下左右4个位置),将与种子相邻的前景像素标记合并到同一个像素集合中,最终得到的该像素集合即为一个连通区域[27]。处理过程为:
(1)设图像p是一个m×n的位图,用数组存放,从上到下,从左到右,依次扫描每个像素点,直到当前的像素点p(x,y)为1。
(2)将p(x,y)作为种子,并赋予其一个标记flag,然后将该种子相邻的4个邻域前景像素入栈。
(3)弹出栈顶元素,赋予其相同的flag,检测该栈顶像素相邻的4邻域,若非空压栈,表示不再处理此点,区域个数加1。
(4)重复步骤(3)操作直到栈中元素为空,此时找到图像p中的一个连通区域,并且该区域中的像素值都被标记为同一个flag。
(5)重复前面4个步骤,可以找到所有连通区域,遍历所有连通区域,若其区域个数判断小于3,则将该区域内的所有像素重置为背景像素。经过该步骤的噪点去除效果如图5所示,其中红色圆圈为背景噪声。
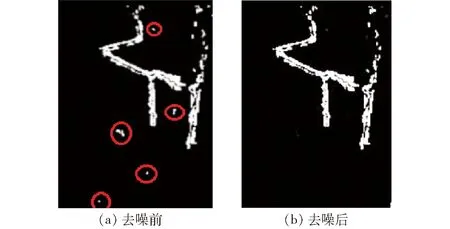
图5 去噪效果Fig.5 Local noise removal effect
1.2.2.2凸包化算法连接渠系断线
针对提取复杂渠道时连续性不足、渠床存在异物以及树木阴影等造成渠系非正常中断的问题,需要进行断线连接处理。断线连接的常用方法有膨胀细化法、张量投票法、凸包化方法等[25]。膨胀细化法直接对栅格数据进行操作,虽然对一部分中断渠道和交汇口具备处理能力,但存在一定盲目性,连接效果并不稳定。张量投票法对较大长度的断裂渠道修复效果一般。而凸包化方法可以有目的地连接较长渠系,具体实现过程是先选出点集Q(p0,p1,…,pn)中y坐标最小的点记为p0,若相同则比较x坐标,并将点集Q按照极角由小到大排序,若相同则按照到p0的距离由小到大排序。然后将p0、p1、p2压入栈,遍历剩下的点,循环剔除不是凸包顶点的点,即非同条渠系所需连接的断点。但由于渠系像素点间离散间距不同,该方法使得渠道变形加粗(图6b),可通过提取中轴线对该问题进行规避(图6c)。
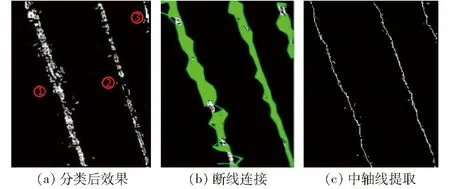
图6 渠道断线连接过程Fig.6 Channel disconnection process
1.2.3结果对比
为了检验不同连接方法对渠系连接的效果,而渠系形状近似为一定宽度的线段,基于这一特征可以通过绘制渠系区域的最小外接矩形来获取渠系的长度、宽度信息。从而进行定量分析评价,即最小外接矩形的长为渠系长度,宽为渠系宽度。测量单位均为像素数并以人工测量作为检验标准[28]。
为衡量本文方法提取渠系的精度,采用精确率P、完整度C、准确率A,3项指标对提取结果进行量化评价[26],其计算公式为
P=TP/(TP+FP)×100%
(10)
C=TN/(TN+FN)×100%
(11)
A=TP/(TP+FP+FN)×100%
(12)
式中TP——正确识别的渠系像素数
FP——非渠系识别为渠系像素数
TN——正确识别的非渠系像素数
FN——渠系识别为非渠系像素数
2 结果与讨论
2.1 断线连接
截取实验区2中的3条渠系,SVM分类后的效果如图6a所示,渠系提取结果连续性较差。采用凸包化方法进行断线连接后的结果如图6b所示,渠系连接效果明显,但变形严重。采用中轴线提取后的结果如图6c所示,3条渠系全部连接,但依然存在少量噪声点。由图6可以看出,3条渠系均较好地连接在一起,特别是渠道2断线恢复效果最明显。对渠道2采用最小外接矩形法定量分析,测量单位均为像素,其测量结果如表1所示。
表1断线连接结果对比

Tab.1 Comparison of connection results 像素
以人工测量作为衡量标准,膨胀细化法、张量投票法在长度和宽度上均出现了较大误差,本文方法处理后的渠道2误差均最小且完整连续,断点间误连接问题通过阈值寻优得到一定程度的解决。
同时渠道1和3连接效果良好,进一步验证了本文方法推广到对整片研究区域进行连接处理的可行性。
2.2 渠系网络提取结果
分别把3个实验样区的结果与实际渠系信息进行叠加对比,对应各方法提取的精确率、完整度、准确率计算结果如表2所示。提取的渠系分布效果如图7所示。不同实验的训练样本对应正射影像中黄色线段。结果表明:
(1)改进的霍夫变换在实验区1这种较大片环境良好的区域(图7a)与SVM方法精确率接近,但是面对分布密集、交错较为复杂的渠系漏提取较多,同时提取精度尽管达到斗渠,但大部分农渠丢失,完整度为86.52%,SVM方法提取的完整度可达91.54%,准确率可达88.34%,均优于改进的霍夫变换。
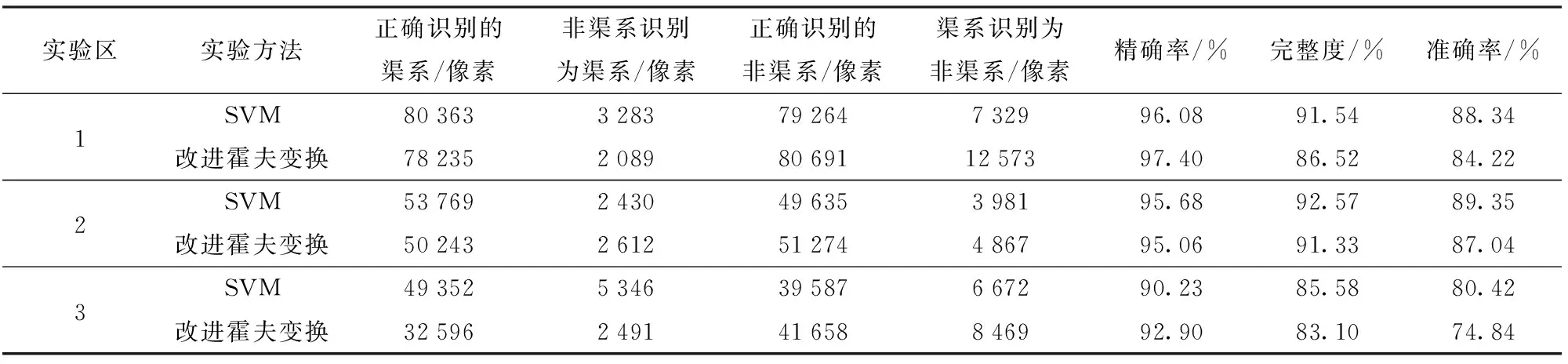
表2 本文方法精度评价及对比Tab.2 Performance and comparison of proposed method
(2)SVM方法在较复杂和复杂区域(图7e)整体表现良好,实验区2渠系提取准确率可达89.35%,实验区3是本次实验中环境最为复杂的区域(图7i),存在大量房屋、道路等干扰信息,考验了本文方法面对复杂环境的适用性。该地区北部存在大片房屋建筑干扰以及各种人为活动的影响,实验准确率达到了80.42%,优于改进霍夫变换的74.84%。
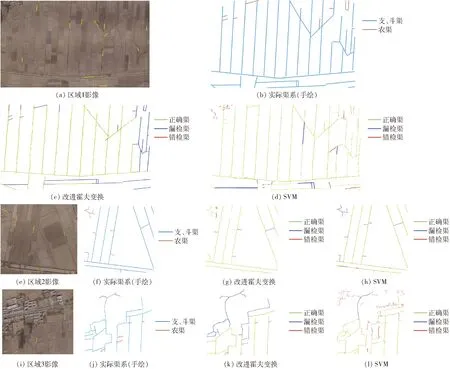
图7 渠系提取效果比较Fig.7 Comparison of canal extraction results
(3)依照各个指标进行精度评价,平均精度为86.34%。针对不同复杂环境下的实验区域,本文方法在人工选点的引导下,均得到了有效的渠系分布信息,准确性和适用性良好。在人工监督下的SVM分类方法能够较为完整地保留渠系分布信息,但仍受限于影像信息与其他地物区分度较小,农渠特征不明显以及与渠道相邻的建筑物、人为活动等干扰。断线连接方法在实验过程中也出现了阈值设置过大,极易出现渠道间误连。而阈值设置过小,又会造成连接效果不佳的处境。所以后期针对不同实验区域情况,进行了人工调优,使其渠道断裂连接效果和渠道间错误连接达到一个相对平衡。
3 结论
(1)基于SVM方法实现了灌区的渠系提取,后期对渠系结果进行优化,有效地解决了渠系断裂和变形问题,提高了渠系提取精度,主要误差来自于农渠等无衬渠特征不明显。
(2)充分结合多源数据的不同特性,采用多核混合的核函数,为渠系提取提供了新的思路,识别精度得到保障,准确率和精确率都达到了较好的结果。
(3)基于无人机正射影像及其衍生数据的灌区渠系制图,最大的瓶颈来自于渠系地形特征模糊以及建筑物的干扰,使得提取难度加大,因此未来基于水文分析方法结合土地利用分类、多光谱数据等可进一步提高制图精度。
1 胡安焱,林凯荣,李玮,等.无资料地区渠系建设的设计洪水计算探讨[J]. 灌溉排水学报,2006,25(2):1-3.
HU Anyan,LIN Kairong,LI Wei,et al.Discussion on design flood calculation of canal system in no data area[J]. Journal of Irrigation and Drainage, 2006, 25(2):1-3.(in Chinese)
2 杨勤科,李锐,曹明明.区域土壤侵蚀定量研究的国内外进展[J].地球科学进展,2006,21(8):849-856.
YANG Qinke,LI Rui,CAO Mingming.Study on quantitative study of regional soil erosion at home and abroad [J].Advances in Earth Science, 2006, 21(8):849-856.(in Chinese)
3 PEUCKER T K,DOUGLASD H.Detection of surface-specific points by local parallel processing of discrete terrain elevation data[J].Computer Graphics & Image Processing,1975,4(4):375-387.
4 刘辉,谢天文. 基于PCA与HIS模型的高分辨率遥感影像阴影检测研究[J].遥感技术与应用,2013,28(1):78-84.
LIU Hui,XIE Tianwen.Research on high-resolution remote sensing image shadow detection based on PCA and HIS model[J].Remote Sensing Technology and Application,2013,28(1):78-84.(in Chinese)
5 SAATI M,AMINI J.Road network extraction from high-resolution SAR imagery based on the network snake model[J].Photogrammetric Engineering & Remote Sensing, 2011(Supp.1):23-26.
6 刘凯,汤国安,黄骁力,等.面向地形特征的DEM与影像纹理差异分析[J].地球信息科学学报,2016,18(3): 386-395.
LIU Kai,TANG Guoan,HUANG Xiaoli,et al.DEM and image texture differences for terrain features[J].Journal of Earth Information Science,2016,18(3):386-395.(in Chinese)
7 RAPINEL S,HUBERT L,CLEMENT B,et al.Ditch network extraction and hydrogeomorphological characterization using LiDAR-derived DTM in wetlands[J].Hydrology Research,2015,46(2):276.
8 CAZORZI F,FONTANA G D,LUCA A D,et al.Drainage network detection and assessment of network storage capacity in agrarian landscape[J].Hydrological Processes,2013,27(4): 541-553.
9 SAH R K,DAS A K.Drainage skeletonization from flow-accumulated area without the use of threshold[J].Geocarto International,2015,30(8): 894-904.
10 SCHWANGHART W,GROOM G,KUHN N J,et al.Flow network derivation from a high resolution DEM in a low relief, agrarian landscape[J].Earth Surface Processes and Landforms,2013, 27(6):39-43.
11 BROERSON T,PETERS R,LEDOUX H.Automatic identification of watercourses in flat and engineered landscapes by computing the skeleton of a LiDAR point cloud[J]. Computers & Geosciences,2017, 106:171-180.
12 韩文霆,张立元,张海鑫,等. 基于无人机遥感与面向对象法的田间渠系分布信息提取[J/OL].农业机械学报,2017,48(3):205-214.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170326&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.03.026.
HAN Wenting,ZHANG Liyuan,ZHANG Haixin,et al.Extraction method of sublateralcanal distribution information based on UAV remote sensing[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017, 48(3):205-214.(in Chinese)
13 张宏鸣,李瑶,王猛,等. 基于无人机DEM的灌区渠系提取方法[J/OL].农业机械学报,2017,48(10):165-171.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20171020&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.10.020.
ZHANG Hongming,LI Yao,WANG Meng,et al.Study on the extraction method of irrigation networks in irrigated area based on UAV DEM [J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(10):168-171.(in Chinese)
14 陆永帅,李元祥,刘波,等.基于深度残差网络的高光谱遥感数据霾监测[J].光学学报,2017,37(11):1-19.
LU Yongshuai,LI Yuanxiang,LIU Bo,et al.Heavy monitoring of hyperspectral remote sensing data based on depth residuals network [J]. Chinese Journal of Optics, 2017, 37(11):1-19.(in Chinese)
15 沈照庆,黄亮,陶建斌. 基于支持向量机的高光谱遥感影像道路提取[J].长安大学学报:自然科学版,2012,32(5):34-38.
SHEN Zhaoqing,HUANG Liang,TAO Jianbin. Hyperspectral remote sensing image road extraction based on support vector machine[J]. Journal of Chang’an University:Natural Science Edition, 2012,32(5): 34-38.(in Chinese)
16 ZHANG H,WEI J,YANG Q,et al.An improved method for calculating slope length (λ) and the LS parameters of the revised universal soil loss equation for large watersheds[J].Geoderma,2017,308: 36-45.
17 YANG T,XU C Y,SHAO Q,et al.Temporal and spatial patterns of low-flow changes in the Yellow River in last half century[J].Stochastic Environmental Research and Risk Assessment,2010,24(2): 297-309.
18 黄亮,舒宁.基于支持向量机(SVM)单目标SAR图像分割[J].地理空间信息,2011,9(1):60-62.
HUANG Liang,SHU Ning.Fractive segmentation of single target SAR based on support vector machine (SVM)[J].Geospatial Information,2011,9(1): 60-62.(in Chinese)
19 冀峰,高新波,谢松云.Mean-shift滤波和直方图增强的图像弱边缘提取[J].中国图象图形学报,2012,17(6):651-656.
JI Feng,GAO Xinbo,XIE Songyun.Mean-shift filtering and histogram-enhanced image weak edge extraction [J].Journal of Image and Graphics,2012,17(6): 651-656.(in Chinese)
20 丁磊,张保明,郭海涛,等.矢量数据辅助的高分辨率遥感影像道路自动提取[J].遥感学报,2017,21(1):84-95.
DING Lei,ZHANG Baoming,GUO Haitao,et al.Automatic extraction of high resolution remote sensing images based on vector data [J]. Journal of Remote Sensing,2017,21(1): 84-95.(in Chinese)
21 邬啸,魏延,吴瑕.基于混合核函数的支持向量机[J].重庆理工大学学报:自然科学版,2011,25(10):66-70.
WU Xiao,WEI Yan,WU Xia.Support vector machine based on mixed kernel function [J].Journal of Chongqing University of Technology:Natural Science Edition,2011,25(10): 66-70.(in Chinese)
22 FANG L, LI S.Classification of hyperspectral images by exploiting spectral-spatial information of superpixelvia multiple kernels[J].IEEE Transactions on Geoscience and Remote Sensing,2014,53(12):6663-6674.
23 LIU M, TUZEL O.Entropy-rate clustering, cluster analysis via maximizing a submodular function subject to a matroid constraint[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2014,36(1): 99-112.
24 张云哲,赵海,宋纯贺,等. 一种新的连通区域标记算法[J].计算机应用研究,2010,27(11):4335-4337.
ZHANG Yunzhe,ZHAO Hai,SONG Chunhe,et al.A new connectivity region labeling algorithm[J]. Application Research of Computers, 2010,27(11): 4335-4337.(in Chinese)
25 于广婷,朱聪,李柏林,等.光学图像中一种新的边界断点连接方法[J].计算机应用研究,2014,31(4):1264-1266.
YU Guangting,ZHU Cong,LI Bolin,et al.A new boundary breakpoint connection method in optical image[J].Application Research of Computers,2014,31(4): 1264-1266.(in Chinese)
26 WIEDEMANN C,HEIPKE C,MAYER H,et al.Empirical evaluation of automatically extracted road axes[J]. Wiley-IEEE Computer Society,1998, 47(3): 172-187.