大豆播种机破碎式仿生覆土装置设计与试验
2018-03-13张志君孙旭伟金柱男孙霁宇
张志君 孙旭伟 金柱男 邴 政 孙霁宇 佟 金
(1.吉林大学机械科学与工程学院, 长春 130022; 2.吉林大学生物与农业工程学院, 长春 130022;3.吉林大学工程仿生教育部重点实验室, 长春 130022)
0 引言
精密播种机由施肥、开沟、排种、覆土、镇压等多个工作部件构成,一次完成开种槽、施种肥、播种、覆土、镇压等多项作业。近年的研究重点多以精密排种器能否提供均匀种子流为主,排种器经历了机械式到气力式的转变,已达到精密播种要求,但对结构相对简单的覆土装置研究较少,技术相对落后[1-2]。
覆土装置作为精密播种机的重要工作部件之一,在开沟下种后进行覆土盖种,其工作性能决定了种子后续生长所需的土壤环境,进而影响种子的发芽率、出苗率及植株分布均匀性[3-4]。目前,覆土装置按结构形式主要分为:单元盘式、八字型刮板式、双圆盘式、V字型式和拖链式。其中以V字型和双圆盘式覆土装置应用最为广泛。现有播种机覆土装置利用对土壤的侧向推移进行种沟覆土[5],其存在的问题表现为:在土质坚硬地段,覆土装置无法将大土块有效破碎,覆土后堆积的土块间形成大量空穴,加快了水分的流失,不利于种子生长所需要的水分要求,严重的会导致种子无法发芽。
破碎土壤方法主要有切碎式、压碎式、碾碎式及刺碎式。现有覆土镇压装置附带有利用镇压滚轮工作面向下的压力压碎土壤功效,但由于土质较为坚硬,效果不理想,故本文选用刺碎式作为碎土设计方案,利用锋利的刺针作用于土壤使土块破碎,适用于破碎表层干燥粘质的大块土壤[6-7]。刺碎式齿形碎土圆盘可达到碎土的功效,扎入土中的齿盘会将地表下的湿土翻起,以一定的角度向种子槽抛出,达到覆土效果,覆土后使大豆种子周围的土壤松软,有足够的氧气和水分,大大提高了大豆出苗率。
刺碎式齿形覆土装置,其工作过程主要是机械与土壤的相互作用,如切削、刮推、挖掘等,土壤动物的某些特性为覆土装置的研制提供了仿生灵感。本文以东方蝼蛄刺状挖掘足作为研究对象,以仿生学理论为指导,研究东方蝼蛄挖掘足的结构特性,以期为破碎式覆土装置的主要碎土部件设计提供方法和途径。
1 仿生设计
1.1 东方蝼蛄趾爪仿生信息的提取
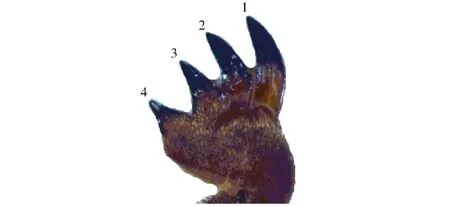
图1 东方蝼蛄趾爪编号Fig.1 Number of oriental mole cricket propodium
运用体视显微镜对东方蝼蛄前足的4个趾爪进行编号,并对趾长、趾尖角、趾间距进行测量,图1和表1给出了相关趾爪图及其尺寸。
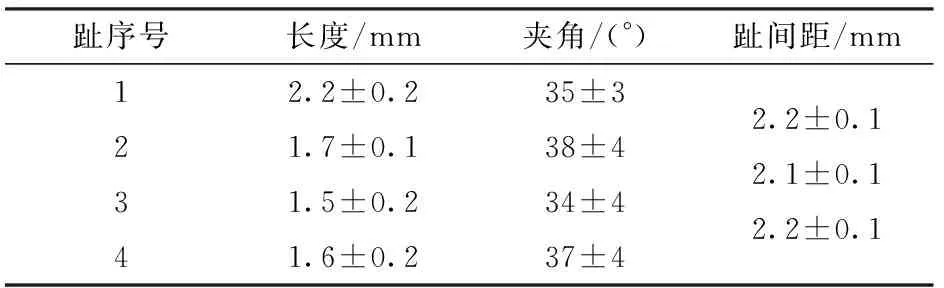
表1 东方蝼蛄前足趾爪几何尺寸Tab.1 Structural parameters of oriental mole cricket propodium
东方蝼蛄趾爪,其基部呈四方楔形,侧面的楔角为30°左右,正面单侧垂直,另一侧相对于垂直侧呈38°夹角,单个趾爪长度为1.7 mm,两趾爪间距为2.2 mm。趾爪的正面趾尖具有类似于土体的圆钝构形,为了便于工程应用,本研究仅考虑趾爪的正面轮廓,对趾尖的圆钝形状进行简化。图2为东方蝼蛄趾爪尺寸示意图。
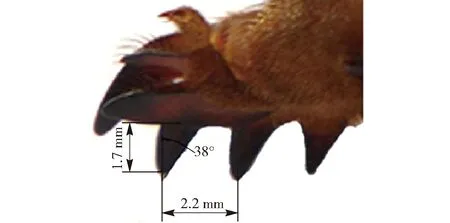
图2 东方蝼蛄趾爪尺寸示意图Fig.2 Structural parameters diagram of oriental mole cricket propodium
1.2 整机结构与工作原理
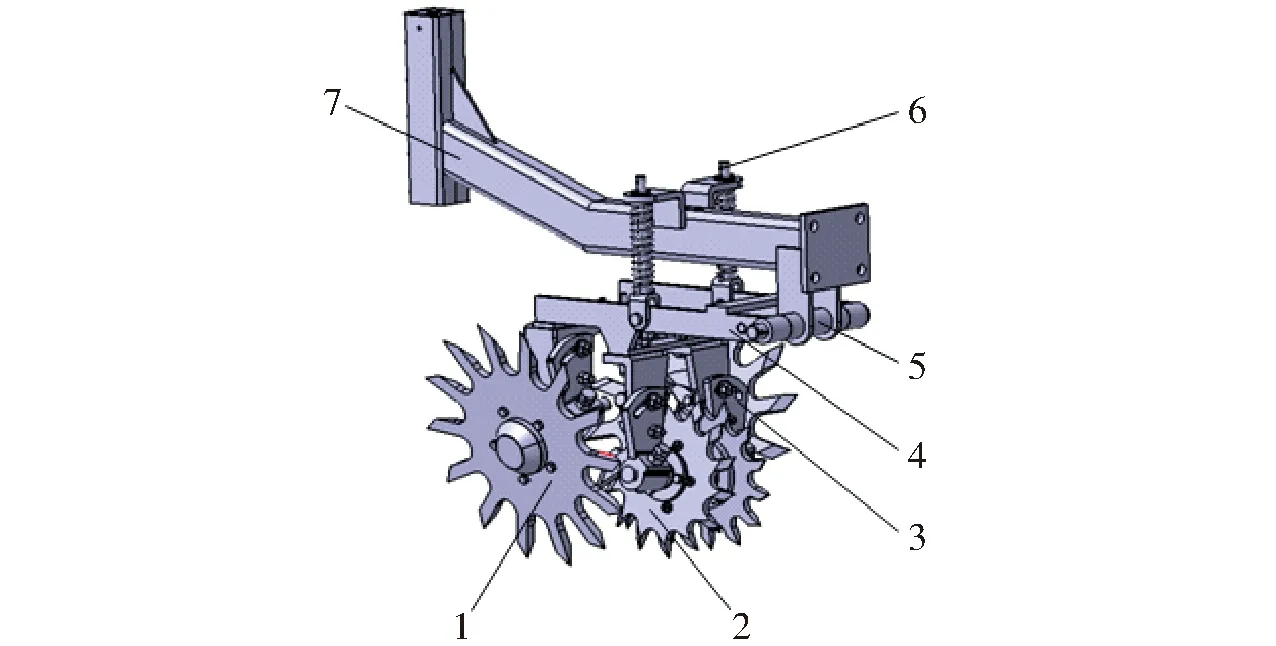
图3 破碎式仿生覆土装置三维图Fig.3 3D drawing of crushing bionic soil covering device1.大碎土圆盘 2.小碎土圆盘 3.折弯法兰 4.固定机架 5.旋转副 6.减震弹簧 7.悬挂架
破碎式仿生覆土装置为拖拽式,整体机构由大小碎土圆盘、折弯法兰、固定机架、旋转副、减震弹簧和悬挂架组成。悬挂架一端与播种机大梁连接,另一端与高低可调镇压器连接,通过对镇压器的高低调节实现覆土装置对土壤的压力控制。同时,悬挂架与底座间通过旋转副及减震弹簧连接,实现覆土装置在覆土过程中对播种机有减震缓冲作用。图3为破碎式仿生覆土装置三维图。
本覆土装置专为双行种子沟设计,覆土轮结构由4个碎土圆盘组合构成,一个大碎土圆盘与一个小碎土圆盘组合为一组,实现对大豆沟槽双侧进行覆土,因为有2组,所以可以同时完成2列单元种子槽的覆土。覆土装置在覆土过程中需要根据土壤松软度调节覆土量,在本文的设计中,调节功能分别通过2个折弯法兰来实现,折弯法兰固定在底座机架上,通过对折弯法兰张角及倾角的配合调节,实现对碎土圆盘在垂直倾斜角及水平张角2个自由度的调节以控制覆土量。
根据大豆植株生长的特点,垄上双行种植技术常采用垄距为60~70 cm、高度为15~20 cm的常规垄,在每条垄台上种植两行行距为10~15 cm的大豆,能够合理分配大豆植株生长空间,确保日照及水、肥得到充分的吸收,同时可以提高单位空间内植株的数量,因此两组碎土圆盘与土壤接触部分的中心线间距离控制在10~15 cm之间。
1.3 仿生碎土圆盘设计
仿生碎土圆盘同属于碎土式圆盘耙类,相关参数可按圆盘靶设计经验公式计算。
(1)碎土圆盘直径D根据覆土深度要求,按经验公式计算
D=Kamax
(1)
式中amax——最大设计覆土深度,mm
K——径深比系数
对于一般碎土圆盘K取4~6,重型圆盘K取3~5,浅耕灭茬圆盘K取5~7。在满足作业质量的条件下,K应尽量取下限。
本设计适配大豆播种机,大豆种子种深为30~50 mm,故amax取50 mm;K取一般碎土圆盘系数6,即D=300 mm。
(2)碎土圆盘厚度δ根据工作负荷选取,或用经验公式计算
δ=(0.008~0.02)D
(2)
一般常用δ为3.5~6 mm。仿生碎土圆盘碎土齿较长,齿上需进行仿生剖面,圆盘基础厚度设计稍大,故本设计δ取8 mm。
(3)碎土圆盘齿形设计。以东方蝼蛄趾爪结构尺寸比例作为参考,设计仿生碎土圆盘齿形。
齿高:根据大豆种深,选取齿高为50 mm。
齿间距:东方蝼蛄趾爪高度及间距分别为1.7 mm和2.2 mm,即比例为1∶1.3。根据比例,齿高已知,则齿间距为65 mm。
齿数:圆盘直径已知,根据圆周长及齿间距,则圆盘齿数为n=πD/65=14.4,取整为14个。
齿宽:根据东方蝼蛄外形比例,初步选定为16 mm。
齿刃角:根据东方蝼蛄前足正面夹角,设计为正面单侧垂直,另一侧相对夹角为40°。
齿楔角:根据东方蝼蛄前足楔角,设计侧面沿背部楔角为30°。
根据以上设计参数,碎土圆盘齿形结构简图如图4a所示,大碎土圆盘结构简图如图4b所示。
同理可得,小碎土圆盘结构简图如图4c所示。

图4 仿生碎土圆盘结构简图Fig.4 Structure diagram of bionic soil disc
2 仿生碎土齿受力分析
设计的破碎式仿生覆土装置由4个仿生碎土圆盘组成,碎土圆盘固定于固定架上,上端由铰链、弹簧与机架相连。在覆土过程中,主要以碎土齿下压破碎土块为主,故对仿生碎土齿主要进行垂直方向受力分析。
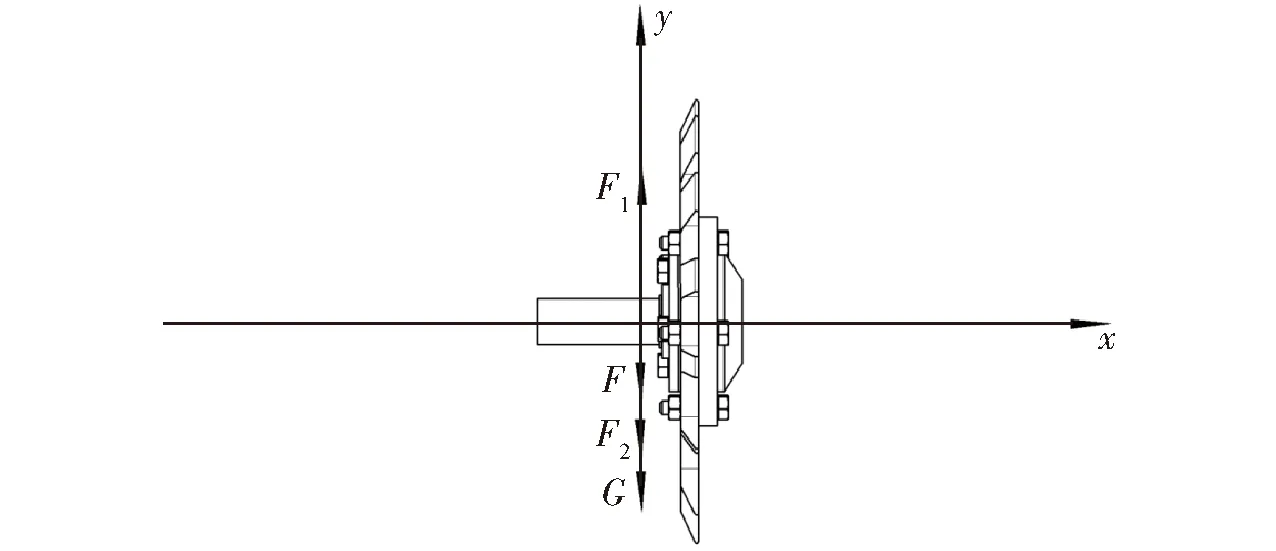
图5 仿生碎土盘受力示意图Fig.5 Schematic diagram of force acting on bionic soil disc
仿生碎土圆盘直径D=300 mm,齿宽b为16 mm,齿厚δ为8 mm,齿刃角θ为正面单侧垂直,另一侧相对夹角为40°,齿楔角φ为侧面沿背部楔角为30°。仿生碎土齿所受土壤压力垂直于楔形面,而楔形面沿2个方向均有倾斜角,在计算垂直分力时需进行两次换算。如图5、6所示,对仿生碎土齿沿y方向进行受力分析得
F=F1-G-F2
(3)
F1=fpcosαcosβ-ffsinγcosβ
(4)
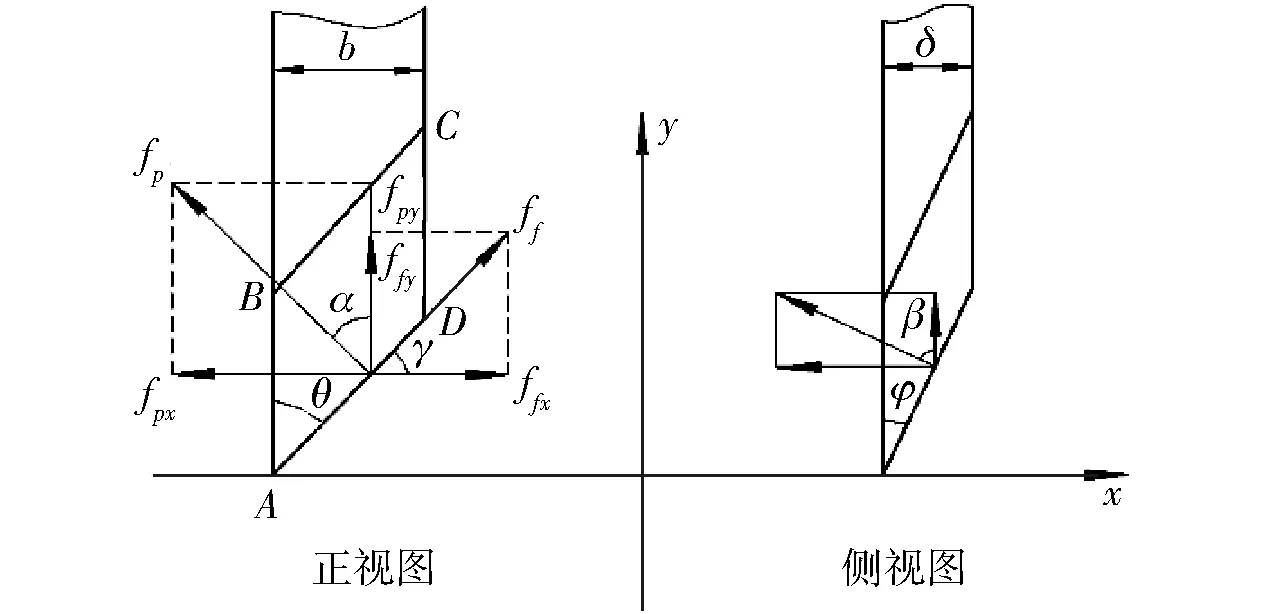
图6 仿生碎土齿受力示意图Fig.6 Schematic diagram of force acting on bionic broken soil tooth
式中F——仿生碎土圆盘垂直方向所受合力
F1——仿生碎土齿垂直方向所受土壤作用合力
F2——单个碎土盘所受弹簧力
G——单个碎土盘重力
fp——土壤对仿生碎土齿合压力
ff——土壤对仿生碎土齿摩擦力
其中摩擦力为
ff=μfp
(5)
由于仿生碎土齿主要由楔形面接触土壤,则其接触面积为
(6)
楔形水平投影面积为
SABCD=blAB
(7)
其中
lAB=δtanβ
(8)
由齿刃角、齿楔角求得α=50°、β=60°、γ=50°。经过计算得到外侧碎土圆盘的接地面积S=2.55 cm2。
根据农业土壤相关研究,含水率为6%的地表干硬土块,土壤应力强度p为104 kPa[8]。则土块对仿生碎土齿压力为
fp=pS=26.52 N
(9)
根据文献[9],若取土与钢板的动摩擦因数μ为0.25,则
F1=11 N
(10)
由于碎土圆盘覆土时,通常有3个碎土齿与土壤发生破碎接触,则碎土圆盘所受合力为3F1,则
F=33-G-F2
(11)
要使仿生碎土齿在重力作用下能够切碎土壤,需要F<0,即G+F2>33 N。由三维建模软件初步质量估算得,单个碎土圆盘组合质量为2.48 kg,则弹簧压缩情况下,其单个碎土圆盘所受弹力F2应大于8.2 N。由于破碎式仿生覆土装置由4个仿生碎土圆盘组成,则固定架处所需弹簧弹力应大于32.8 N。
3 仿真分析
3.1 仿真方法
采用SPH方法进行仿真分析[10-13],SPH无需借助网格,特别适合于求解高速碰撞等动态大变形问题[14-17]。本文选用Ls-Dyna中第147号FHWA-SOIL本构模型作为土壤材料模型,它是一种非线性弹塑性同体材料模型,虽与传统Drueker-prager模型都是以Mohr Cloulomb屈服准则为基础,但参数设置更加全面,同时考虑了塑性软化、塑性硬化和孔隙水压力效应,使土壤模型更接近于真实土体,且适合于土体切削、挤压的数值仿真[18-20]。
3.2 仿真过程
土壤粒子在载荷作用下的状态和载荷的大小密切相关。在外力由小变大的过程中,土壤粒子先表现为线弹性,再表现为塑性状态,随后进入屈服状态,然后出现硬化,随着应力继续变大,发生初始失效,进而破裂。
图7描述了破碎深度为40 mm、前进速度为1 m/s、旋转角速度为3.33 rad/s时,0.04~0.64 s的土壤破碎过程。在0.04 s时破碎圆盘开始和土壤接触,破碎齿切入土壤,土壤受到剪切力的作用,发生失效。随着破碎齿的转动,失效土粒受到破碎齿反转推力,发生崩裂失效,向上抛出,随后在重力作用下,落回土槽。通过仿真模拟能够较为真实直观地反映覆土装置破碎土壤过程中的物理现象。
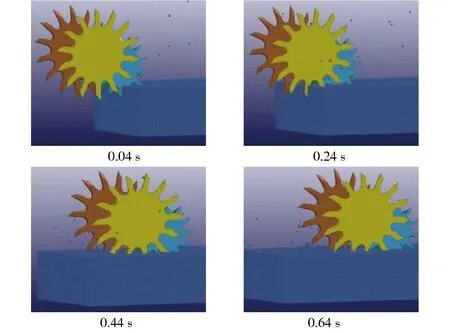
图7 破碎式覆土装置破碎土壤仿真效果图Fig.7 Simulation crushing soil effect diagram of crushing bionic soil covering device
3.3 碎土圆盘切削力及土壤应力分析
碎土圆盘在破碎土壤过程中,使土壤发生变形所需要的力称为切削力,碎土圆盘所受到土壤的作用反力称为切削阻力。碎土圆盘在破碎土壤过程中在垂直地面方向受力的情况如图8所示。
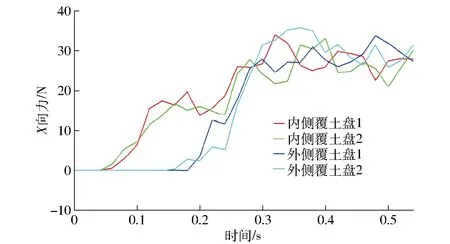
图8 破碎式碎土圆盘垂直地面方向受力变化曲线Fig.8 Changing curves of force of vertical earth surface of broken soil disc
外侧碎土圆盘初始受力稍晚于内侧碎土圆盘,这与覆土装置空间位置相符,随着与土壤接触面积的增加,4个碎土圆盘的受力呈现出波动状,但基本维持在30 N左右,上下波动幅度维持在±2 N内。由于单个碎土圆盘组合自重及弹簧力合力大于30 N,保证了在自重及弹簧力作用下覆土装置入土力学要求及碎土过程中的稳定性。
土的破坏多是剪切破坏,即因土的强度不足以抵抗某一剪切面上的剪应力作用,使沿着该剪应力方向的剪切变形急剧发展所造成的破坏。土壤在受到剪应力作用时,土壤具有抵抗剪切的能力。根据农业土壤相关研究,含水率6%的地表干硬土块,抗剪强度为104 kPa[9]。
图9为覆土装置切削土壤过程中土壤的等效应力分布,从图9中可以看出,随着碎土圆盘的前进,土壤所受应力不断变化,其最大等效应力发生在切削刃处,为133.7 kPa,大于干硬土块的抗剪强度,保证了对干硬土块的破碎作用。
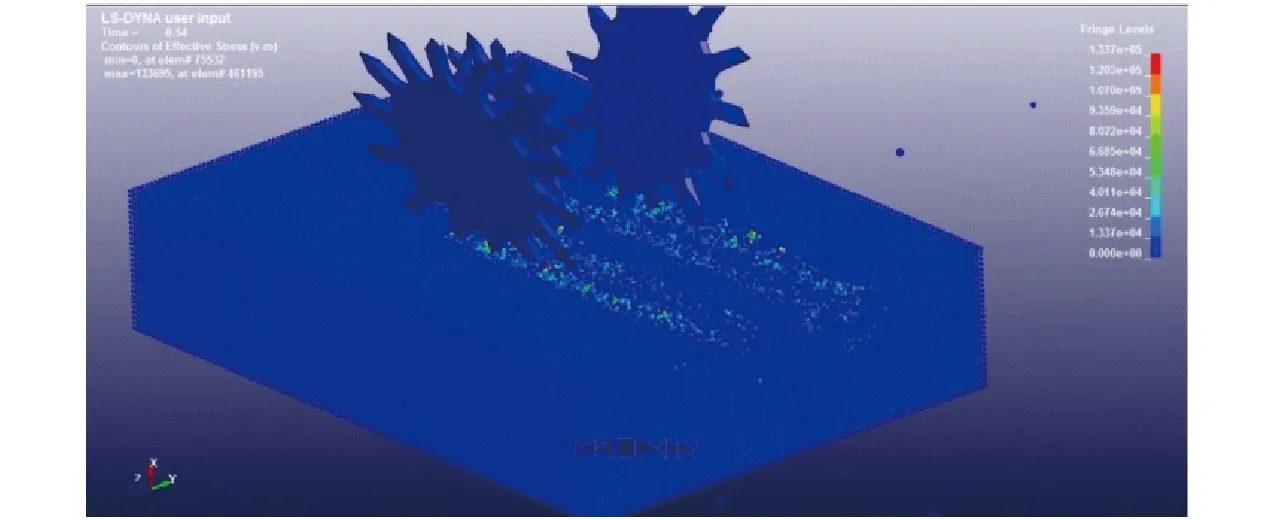
图9 土壤的等效应力分布Fig.9 Equivalent stress distribution of soil
3.4 覆土过程中种子横向位移
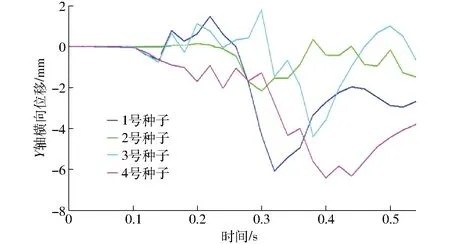
图10 部分种子在Y轴横向位移变化曲线Fig.10 Changing curves of transverse displacement of seeds in Y axis
图10为覆土过程中部分种子Y轴横向位移情况,破碎式仿生覆土装置覆土过程中,由于碎土圆盘呈现两前两后空间分布,种子前后经过两侧碎土圆盘作用,随着时间推移呈现先向左、继而向右的位移变化情况,但位移变化量较小,最大位移变化量约为6 mm,位于种子位置波动允许范围内。
4 田间试验
为对破碎式仿生覆土装置覆土性能、覆土后种子的实际位置偏差、覆土过程是否达到了预想要求、覆土后种子生长空间是否良好等综合性能进行检测评估,采用对比试验法,将破碎式仿生覆土装置与原有双圆盘式覆土装置进行对比试验。试验指标为:直观覆土效果、土壤破碎率、覆土厚度、覆土后种子位移。
田间试验所用试验仪器和设备主要包括:2BG6-06型大豆精密播种机、雷沃欧豹M554-B型拖拉机、土壤水分测试仪、环刀组件、标杆、卷尺、直尺等。试验中拖拉机的作业速度与大豆栽培播种要求及仿真分析速度均设置为 1.0 m/s,覆土装置碎土圆盘间夹角及高度调整到最适宜位置。
4.1 土壤物理参数的测定
试验地点为黑龙江省勃利县勃农产业园(北纬44.69°、东经129.43°),该试验田地处寒温带,昼夜温差大,地形平坦,年收割一次,土壤营养含量高,为大豆种植理想区域[21]。
使用TDR300型土壤含水率测定仪测量含水率,在试验田内随机选取6个测试点,分别使用10 cm及20 cm探针测量,测量后取平均值,结果如表2所示,测量期间试验地块无降雨。

表2 土壤含水率测量值Tab.2 Measurement result of soil moisture content %
使用SC900型土壤硬度测试仪测量土壤坚实度,测量中选取1/2″直径的锥头,在试验田内选取3个区域,在每个区域内距离土壤表面10 cm以内进行坚实度测试,每块区域测量3次,取平均值,求得相应的试验土壤坚实度,结果如表3所示。
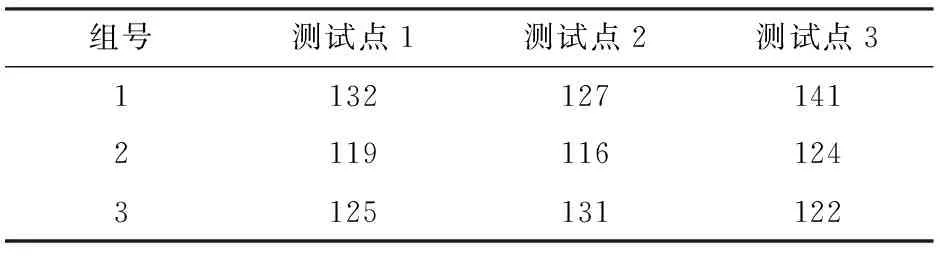
表3 土壤坚实度测量值Tab.3 Measurement result of soil firmness kPa
在试验田内随机选出5块区域,每块区域测量5次,取平均值,求得相应的土壤容积密度。表4为土壤容积密度测量值。
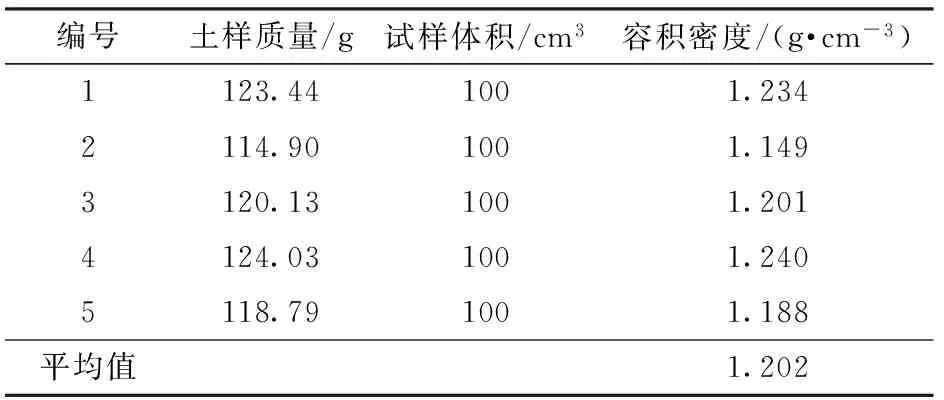
表4 土壤容积密度测量值Tab.4 Measurement result of soil bulk density
4.2 覆土性能试验分析
将播种机原有双圆盘式覆土装置替换成破碎式仿生覆土装置,进行覆土试验,试验过程如图11所示。

图11 破碎式仿生覆土装置覆土性能试验Fig.11 Soil performance test of crushing bionic soil covering device
通过试验过程中跟随拍摄与观察,破碎式仿生覆土装置有效地达到了碎土的功效,扎入土中的碎土圆盘会将地表以下的湿土翻起,以一定的角度向种子槽抛出,达到覆土功效。本次试验验证了预想的覆土效果,完成了覆土功能的要求,并具有较强的碎土性以及更湿润的覆盖土壤。但覆土过程中,由于小碎土圆盘过小,齿形间结构复杂,间距不足,导致土块会堆积在大小碎土圆盘之间,影响覆土效果,需对齿间间距、角度调节结构做调整,以便齿间有足够空间使土流通过。
4.3 破碎式仿生覆土装置与双圆盘式覆土装置对比试验(不加装镇压轮)
拆去镇压轮结构后,加装双支撑轮,对试验后覆土效果进行比对评估,对比试验如图12所示。

图12 破碎式仿生覆土装置与双圆盘式覆土装置对比试验(不加装镇压轮)Fig.12 Comparison test between crushing bionic soil covering device and double disc type soil covering device (without farmflex)
对比试验结果表明,破碎式仿生覆土装置更适用于大豆播种机。普通双圆盘式覆土装置明显将土壤推挤到两种子行中间,虽然达到了覆土目的,但是其覆盖土壤层明显过厚,同时由于土块的存在,覆土湿润度不均匀,种子行中间的土壤过多,不利于种子生长。破碎式仿生覆土装置双行覆土设计直接对应于两条种子行,分别对每一条种子行进行覆土,覆盖土壤更细碎,湿润度更好,土表更平整。
4.4 破碎式仿生覆土装置与双圆盘式覆土装置覆土对比试验(加装镇压轮)
通过试验结果对比可以看出,破碎式仿生覆土装置覆土效果明显优于普通双圆盘式覆土装置,如图13所示。破碎式仿生覆土装置覆土镇压后,土壤细碎、松软、平整,不存在坚硬大块土壤,而且湿润度均一。普通双圆盘式覆土装置覆土效果则是覆土镇压后土壤块化明显,松软度不够,由于大土块的存在,导致空穴产生,加速水分流失。

图13 破碎式仿生覆土装置与双圆盘式覆土装置对比试验(加装镇压轮)Fig.13 Comparison test between crushing bionic soil covering device and double disc type soil covering device (with farmflex)
破碎式仿生覆土装置与双圆盘式覆土装置覆土后的土壤破碎率对比如表5所示。表中土壤破碎率η为在覆土装置行进路线上分别取6组相同体积的土壤,计算式为
(12)
式中m1——所取土样整体质量
ms——所取土样去除大土块后(体积大于20 cm3)所剩土壤质量
从表5中可以看出,破碎式仿生覆土装置比双圆盘式覆土装置对土壤破碎程度高约15个百分点,且平均破碎率高于90%,有利于种子生长,能够有效提高作物产量。
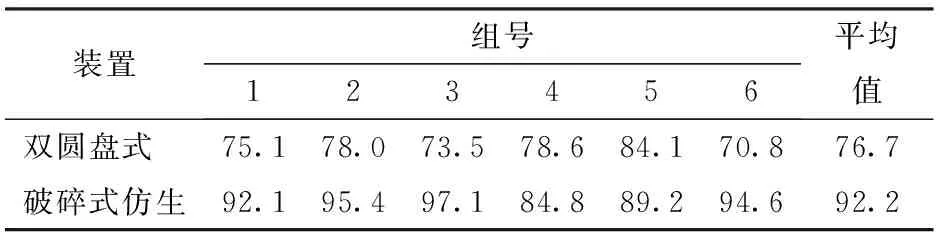
表5 破碎式仿生覆土装置与双圆盘式覆土装置土壤破碎率Tab.5 Soil breaking rate between crushing bionic soil covering device and double disc type soil covering device %
4.5 破碎式仿生覆土装置与双圆盘式覆土装置覆土后覆土厚度与种子行间距检测(加装镇压轮)
对比试验完成后,将种子找出,并分别测量破碎式仿生覆土装置与双圆盘式覆土装置覆土后的种子深度与种子行间距,过程如图14所示,结果如表6所示。平均值分别为:2.4、10.1、5.0、10.5 cm。

图14 种子位置指标检测Fig.14 Index detection of seed position
种植大豆要求双条种子行间距10~12 cm,覆盖土层厚度3~4 cm为宜,过厚则导致种子芽不易冒出地面,过薄则表层土壤容易缺失水分。通过比对试验结果,发现破碎式仿生覆土装置覆土镇压后种子覆盖土壤过薄,应适当增加播深,满足种子生长要求。双圆盘式覆土装置则覆盖土壤过厚,且覆盖厚度波动明显。对于种子行间距,破碎式仿生覆土装置优于普通双圆盘式覆土装置,间距控制更稳定。
破碎式仿生覆土装置达到了预想的效果,完成了覆土功能要求,并具有较强的碎土性以及更湿润的覆盖土壤,对种子触地后位置影响较小,更能满足种植大豆双条种子行的覆土要求。
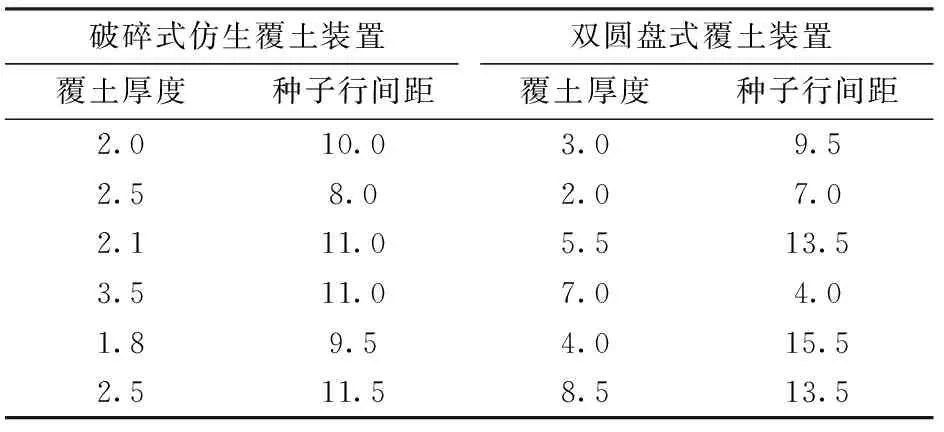
表6 破碎式仿生覆土装置与双圆盘式覆土装置覆土后种子深度与种子行间距检测结果Tab.6 Seed depth and row spacing detection of crushing bionic soil covering device and double disc type soil coverer cm
5 结论
(1)东方蝼蛄刺状挖掘足具有高效的挖掘土壤能力,受这一特性启发,设计了破碎式覆土装置。本覆土装置专为双行种子沟设计,可实现对大豆沟槽双侧进行覆土,且覆土量可控。
(2)破碎式碎土圆盘垂直方向切削力仿真分析,验证了在自重及弹簧力作用下覆土装置达到了入土力学要求及碎土过程中的稳定性。破碎式碎土圆盘等效应力分析,得出等效应力为133.7 kPa,在覆土过程仿真分析中,由于碎土圆盘呈现两前两后空间分布,种子前后经过两侧碎土圆盘作用,种子位移变化量较小,位于种子位置波动允许范围内。
(3)田间试验结果表明,破碎式仿生覆土装置完成了覆土功能要求,并具有较强的碎土性以及更湿润的覆盖土壤,覆盖土层厚度适宜,对种子触地后位置影响较小。
1 李成华,马成林,于海业,等.倾斜圆盘勺式玉米精密排种器的试验研究[J].农业机械学报,1999,30(2):38-41.
LI Chenghua,MA Chenglin,YU Haiye,et al. An experimental study on the precision metering device with declined scoop-type disc for maize[J].Transactions of the Chinese Society for Agricultural Machinery,1999,30(2):38-41. (in Chinese)
2 于建群,马成林,杨海宽,等.组合内窝孔玉米精密排种器型孔的研究[J].吉林工业大学自然科学学报,2000,30(1):16-20.
YU Jianqun,MA Chenglin,YANG Haikuan,et al. Study on the cell of combination inner-cell corn precision seed-metering device[J].Natural Science Journal of Jilin University of Technology,2000,30(1):16-20.(in Chinese)
3 PANNING J W,KOCHER M F,SMITH J A,et al. Laboratory and field testing of seed spacing uniformity for sugarbeet planters[J].Applied Engineering in Agricalture,2000,16(1):7-13.
4 OZMERZI A,KARAYEL D,TOPAKCI M. Effect of sowing depth on precision seeder uniformity[J].Biosystems Engineering,2002, 82(2):227-230.
5 程生军,刘欣,王彦刚,等.玉米机械化播种技术及机具研究[J].农业科技与装备,2015(4):63-64.
CHENG Shengjun,LIU Xin,WANG Yan’gang,et al. Research on the technique and machinery of maize mechanization sowing[J].Agricultural Science & Technology and Equipment,2015(4):63-64. (in Chinese)
6 农业部农民科技教育培训中心.整地机械的碎土方法(耕整地与种植机械)[M].北京:中国农业大学出版社,2009.
7 LU D,WENG Q. Use of impervious surface in urban land-use classification [J].Remote Sensing of Environment,2006, 102(1):146-160.
8 王为,李小昱,王转卫,等.农业土壤抗剪强度的试验研究[J].干旱地区农业研究,2002,20(1):125-127.
WANG Wei,LI Xiaoyu,WANG Zhuanwei,et al. An experimental study on the resistance to shear of agricultural soil[J].Agricultural Research in the Arid Areas,2002,20(1):125-127. (in Chinese)
9 陈东辉.典型生物摩擦学结构及仿生[D].长春:吉林大学,2007.
CHEN Donghui. Typical bio-tribological structures and their biomimetic applications[D].Changchun:Jilin University,2007. (in Chinese)
10 ZHONG Jiang,JIANG Jiandong,JIANG Tao,et al. Deep-tillage rotavator technology based on smoothed particle hydrodynamics simulation[J].Journal of Mechanical Engineering,2010,46(19): 63-69.
11 LIU G R, LIU M B,LI Shaofan. 光滑粒子流体动力学:一种无网格粒子法[M].韩旭,杨刚,强洪夫,译.长沙:湖南大学出版社,2005.
12 高建民,周鹏,张兵,等.基于光滑粒子流体动力学的土壤高速切削仿真系统开发及试验[J].农业工程学报,2007,23(8):20-26.
GAO Jianmin,ZHOU Peng,ZHANG Bing,et al. Development and test of high speed soil-cutting simulation system based on smooth particle hydrodynamics[J].Transactions of the CSAE, 2007,23(8):20-26.(in Chinese)
13 LIBERSKY L D,PETSCHEK A D. Smoothed particle hydrodynamics with strength of materials[J].Lecture Notes in Physics,1990,395:248-257.
14 BELYTSCHKO T,GU L. Element-free galerkin methods[J].International Journal for Numerical Methods in Engineering,1994,37:229-256.
15 NAYROLES B,TOUZOT G,VILLON P. Generalizing the finite element method: diffuse approximation and diffuse elements[J]. Computational Mechanics,1992,10:307-318.
16 ALLEN R,SULSKY D,SCHREYER H L. Fluid-membrane interaction based on the material point method[J].International Journal for Numerical Methods in Engineering,2000,48:901-924.
17 朱留宪,杨玲,杨明金,等.基于光滑流体动力学的土壤切削仿真研究[J].中国农机化学报,2014,35(4):274-277.
ZHU Liuxian,YANG Ling,YANG Mingjin,et al. Simulation research of soil cutting based on smoothed particle hydrodynamics[J].Journal of Chinese Agricultural Mechanization,2014,35(4):274-277.(in Chinese)
18 U.S. Department of Transportation Federal Highway Administration. Evaluation of LS-DYNA soil material model147[R].Volpe National Transportation Systems Center,Federal Highway Administration,Report No.FHWA-HRT-04-094,2004.
19 蒋建东,高洁,赵颖娣,等.基于ALE有限元仿真的土壤切削振动减租[J].农业工程学报,2012,28(1):33-37.
JIANG Jiandong,GAO Jie,ZHAO Yingdi,et al. Numerical simulation on resistance reduction of soil vibratory tillage using ALE equation[J].Transactions of the CSAE,2012,28(1):33-37. (in Chinese)
20 RABCZUK T,EIBL J,STEMPNIWESKI L. Simulation of high velocity concrete fragmentation using SPH/MLSPH [J].International Journal for Numerical Methods in Engineering,2003,56(10):1421-1444.
21 武中庆.勃利县气候条件与水稻产量关系探讨[J].现代农业科技,2014(16):240,242.
WU Zhongqing. A study on the relationship between climate and rice yield in Boli County[J].Modern Agricultural Science and Technology,2014(16):240,242.(in Chinese)