基于激光雷达的巡检机器人导航系统研究
2018-03-13季宇寒
季宇寒 李 寒 张 漫 王 琪 贾 稼 王 库
(1.中国农业大学现代精细农业系统集成研究教育部重点实验室, 北京 100083;2.北京兴汇同维电力科技有限公司, 北京 100083)
0 引言
巡回检验是在产品生产、运行中进行的定期或随机检验,旨在及时发现设备质量问题或运行故障。人工巡检耗费大量劳动力,智能巡检机器人能够保证巡检任务高效、可靠执行[1-3],并将巡检人员从单调重复的巡检任务中解放出来,在农业生产[4-5]、变电站维护[6-7]、桥梁隧道检修[8-9]、线缆异常排查[10-11]等方面均有应用。高精度的导航定位是巡检机器人完成巡检任务的核心技术,直接影响巡检的效率与可靠性。
目前,国内外巡检机器人的传统导航方案都有一定的局限性。磁轨与RFID标签方案需要预埋,对地面有较大破坏,且具有较高的维护成本[15]。GNSS方案在遮挡较多的场景下易丢失卫星信号,且不能用于室内[16-18]。惯导与编码器方案的导航误差会累积,长时间使用有较大误差[19]。视觉方案对光线要求较高,对阴影敏感,室外应用效果不佳[20-21]。激光雷达(Light detection and ranging,LiDAR)作为导航定位的新型传感器,以其高精度、高实时性、全天候等优点逐渐成为巡检机器人导航的主流设备[22-26]。
本文旨在搭建基于激光雷达的巡检机器人导航平台,融合激光雷达与编码器信息,建立环境地图,规划最优路径,从而实现巡检导航定位。
1 巡检导航系统开发
1.1 系统整体设计
巡检导航系统由远程监控平台与巡检机器人两部分组成,如图1所示。其中,远程监控平台是任务分配与数据管理中心,巡检机器人是数据采集与任务执行终端。二者通过无线网络(2.4 GHz电台或4 G LTE基站)进行实时通信,分工协作完成巡检任务。本研究以巡检机器人为研究对象。
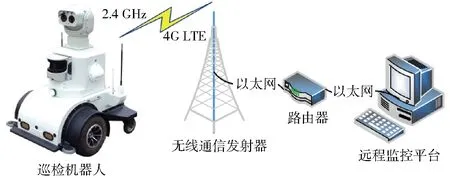
图1 巡检导航系统整体结构Fig.1 Overall framework of inspection navigation system
1.2 巡检机器人设计
1.2.1硬件设计
巡检机器人硬件由环境感知模块、数据处理模块、车体控制模块和无线通信模块4部分组成,如图2所示。
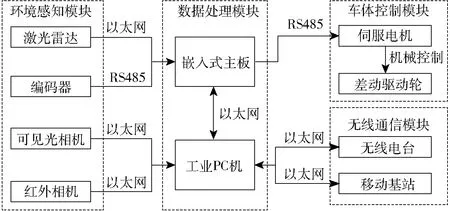
图2 巡检机器人硬件结构图Fig.2 Hardware structure diagram of inspection robot
(1)环境感知模块
准确、快速的环境感知是导航系统可靠工作的前提,巡检机器人通过环境感知模块实现对外界环境与自身状态的信息获取。机器人搭载的SICK LMS511二维激光雷达,具有190°水平扫描角度范围,0.167°水平分辨率,80 m测距量程和25 Hz的扫描频率,可实现室内外环境信息的高效获取。机器人的差动驱动轮配备编码器,能实时反馈机器人位姿信息。机器人搭载可见光相机与红外相机,分别提供可见光图像和红外图像,以基于多通道图像的信息融合对巡检目标进行可靠的检测。
(2)数据处理模块
实时、可靠的数据处理是巡检任务顺利执行的关键,巡检机器人通过数据处理模块完成目标检测、导航定位、移动控制等核心功能。机器人搭载工业PC机作为顶层控制器,安装Windows操作系统,便于应用程序的设计开发,可扩展多种巡检应用;搭载Cortex A9核心的嵌入式主板作为底层控制器,该主板具有丰富的外设接口,可扩展不同的传感器和执行机构。顶层与底层控制器通过以太网进行高效、稳定的数据交互。
(3)车体控制模块
平稳、安全的车体控制是机器人到达目标位置的保证,巡检机器人通过车体控制模块驱动车体移动。机器人的差动轮式底座由2个差动驱动轮和2个万向从动轮组成,具有控制简单、转向灵活等优点,能实现机器人的完整运动控制。为保证对机器人底座的精确控制,选择伺服电机驱动差动轮,通过伺服反馈提高控制精度。
(4)无线通信模块
高速、广域的数据交互是实现智能巡检的基础,巡检机器人通过无线通信模块与远程监控平台进行巡检数据与控制指令的通信。机器人搭载2.4 GHz无线电台通信模块与4 G LTE移动通信模块,可根据工作环境切换通信模式,具有良好的通用性。
1.2.2软件设计
巡检机器人软件由应用层、控制层和驱动层3个层次构成,如图3所示。其中,应用层为基于Windows的巡检任务调度程序,可根据不同的应用场景,调整机器人的任务模式。控制层为基于ROS(Robot operating system)的地图建立、路径规划、导航定位程序,是导航软件系统的核心,也是实现机器人自主导航的关键。驱动层为基于Ubuntu的移动平台控制程序,以经典的PID算法为控制核心,实现移动机器人平稳、安全移动。
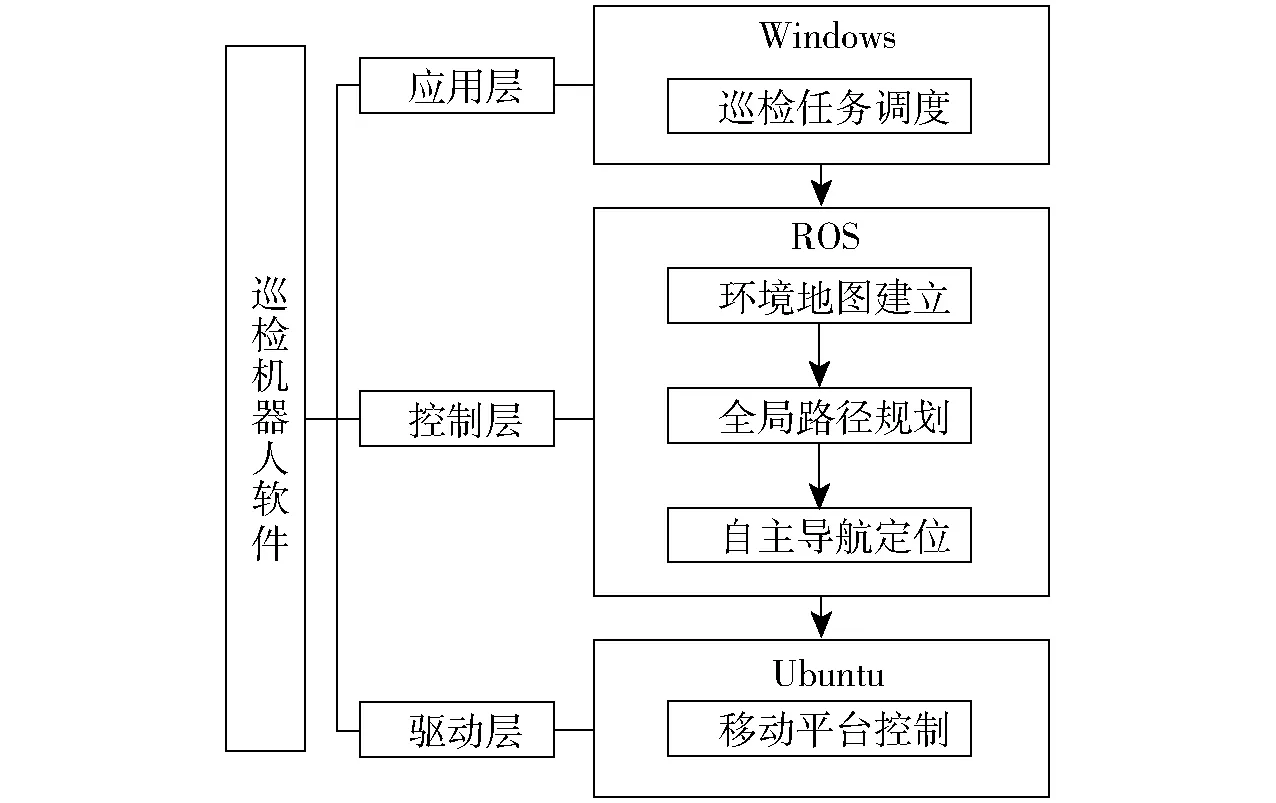
图3 巡检机器人软件结构图Fig.3 Software structure diagram of inspection robot
1.3 巡检导航软件设计
导航软件是巡检机器人软件系统控制层的核心,主要由环境地图建立、全局路径规划和自主导航定位3个部分构成。
1.3.1环境地图建立
环境地图是机器人通过传感器对周围环境进行理解后形成的先验知识,准确的环境地图是机器人实现导航定位的前提。巡检机器人将激光雷达与编码器信息相融合,构建二维环境栅格地图,为机器人提供导航定位信息。
二维地图建立算法基本都依赖于概率估计,如:Gmapping、HectorSLAM、KartoSLAM等[27]。Gmapping是基于粒子滤波的二维SLAM算法,其融合激光雷达和里程计信息,具有较强的鲁棒性。为平衡算法的精度与复杂度,采用Rao-Blackwellized随机模型对粒子数进行初始化,并通过自适应重采样技术,可有效防止粒子退化。采用离线数据建图,相比SLAM方式,传感器的完整离线数据可节约重复采集数据的时间。同时,通过复用离线数据也能调整算法经验参数,提高建图精度。
使用ROS系统实现Gmapping算法过程如图4所示。其中:数据包重放节点发布激光扫描数据、里程计数据、坐标变换数据。Gmapping节点订阅以上消息,结合机器人模型的静态坐标变换树数据,建立二维栅格地图,并发布地图消息。
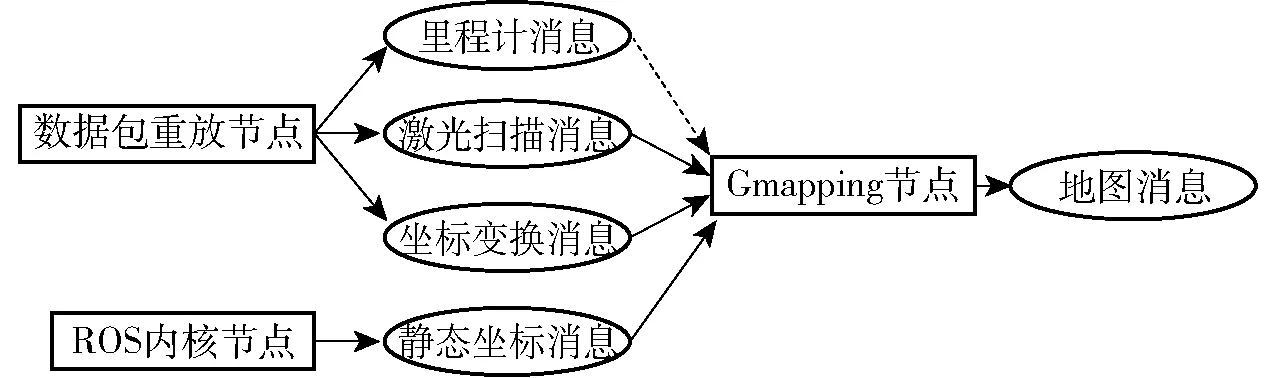
图4 Gmapping算法ROS节点关系图Fig.4 ROS node relationship of Gmapping algorithm
选择具有闭合路径的室内环境建立二维地图,通过检验地图的结构特征与闭合情况来评估建图效果。机器人通过对激光雷达和编码器的数据采集,记录环境与自身信息的完整观测数据。为检验地图的路径闭合情况,机器人返回出发点后继续采集一段数据,保证数据完整闭合。
1.3.2全局路径规划
巡检机器人的任务具有高重复性,通过路径规划算法,获得全局最优的巡检路径,能够显著提高巡检效率、减少能源消耗。
全局路径规划的流程包括地图关键点标记、候选路径计算和最优路径筛选3个步骤。
(1)地图关键点标记
地图关键点是机器人执行巡检任务时需要进行停车检查的点(停车点)或进行转向的点(转向点)。明确巡检任务中各个关键点的位置、方向、类型等属性是路径规划的基础。
机器人使用MySQL数据库以数据表的形式管理关键点信息,设计如表1所示。
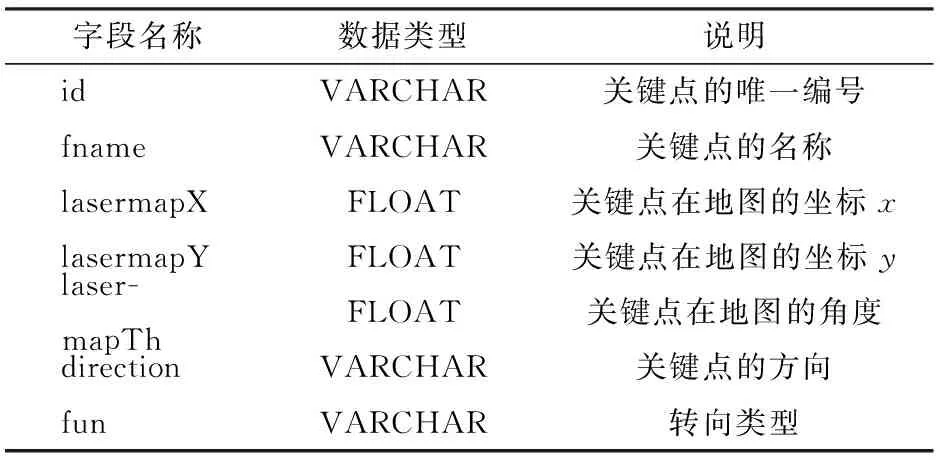
表1 关键点数据表设计Tab.1 Design of key point
(2)候选路径计算
候选路径是地图关键点间的有向通路,是巡检路线的基本组成部分。通过计算候选路径的距离,能够为最优路径的筛选提供数据支持。
以两关键点间的实际路径长度为权重,采用Dijkstra最短路径算法计算全部候选路径的距离。考虑到候选路径起止点方向不一致引起的转向,根据转向角度按比例对候选路径附加权值增益。采用数据表的形式管理候选路径,设计如表2所示。
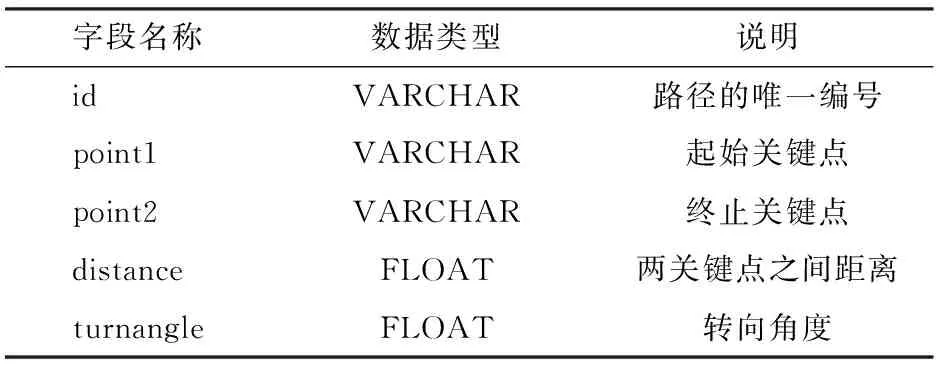
表2 候选路径数据表设计Tab.2 Design of potential route
(3)最优路径筛选
最优路径是遍历巡检点并返回初始位置的最短候选路径序列,是全局路径规划的最终结果。因此,最优路径的筛选是典型的旅行商问题(Traveling salesman problem,TSP)。考虑巡检任务的高重复性与路径规划的非实时性,采用分支界定方法离线筛选最优路线,获取全局最短路径。
分支界定是以广度优先搜索(Breadth first search,BFS)算法为原型进行优化的一种解空间搜索算法。通过对解空间搜索树的分支进行扩展与剪裁,不断调整搜索方向,加快找到全局最优解的速度。分支界定算法的流程图如图5所示。
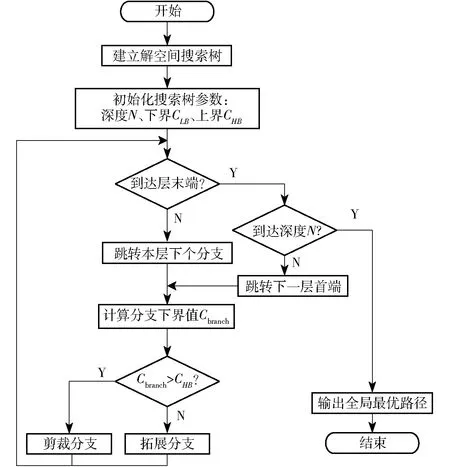
图5 分支界定算法流程图Fig.5 Flow chart of branch-and-bound algorithm
分支拓展与剪裁是分支界定的核心:若当前分支下界Cbranch小于解空间上界CHB,则进行拓展;否则,进行剪裁。对节点进行逐层搜索操作,直至到达叶子节点,最小代价解即为全局最优路径。算法求解过程中的主要参数为
(1)

(2)
(3)
(4)

(5)

(6)
式中n——地图关键点总数
m——已搜索地图关键点数
C——候选路径权值矩阵
sij——候选路径i→j的权值
Cclosed——已搜索候选路径权重
Copen——未搜索候选路径权重下界值
CLB——解空间权重下界值
CHB——解空间权重上界值
Cbranch——当前分支权重下界值
全局最优路径以拓扑图的形式显示在用户界面上,如图6所示。
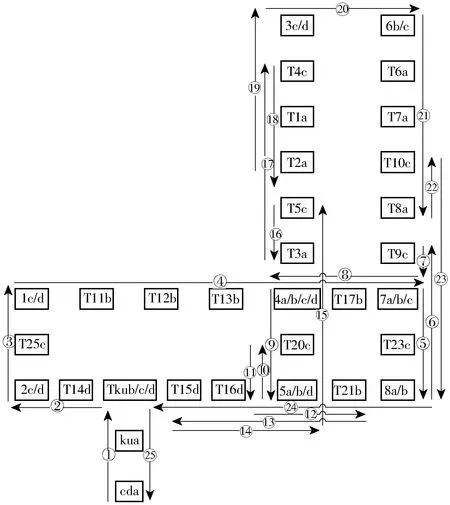
图6 最优巡检路径拓扑图Fig.6 Topology map of optimal inspection path
1.3.3自主导航定位
巡检机器人在准确的环境地图与明确的巡检路径的基础上,通过导航定位算法计算到达目标位置。
采用自适应蒙特卡罗定位(Adaptive Monte Carlo localization,AMCL)算法实现机器人定位。AMCL算法以蒙特卡罗定位(Monte Carlo localization,MCL)算法为基础,增加自适应的KLD(Kullback-Leibler distance)方法更新粒子,可有效防止粒子退化。
ROS系统实现AMCL导航定位的过程如图7所示。
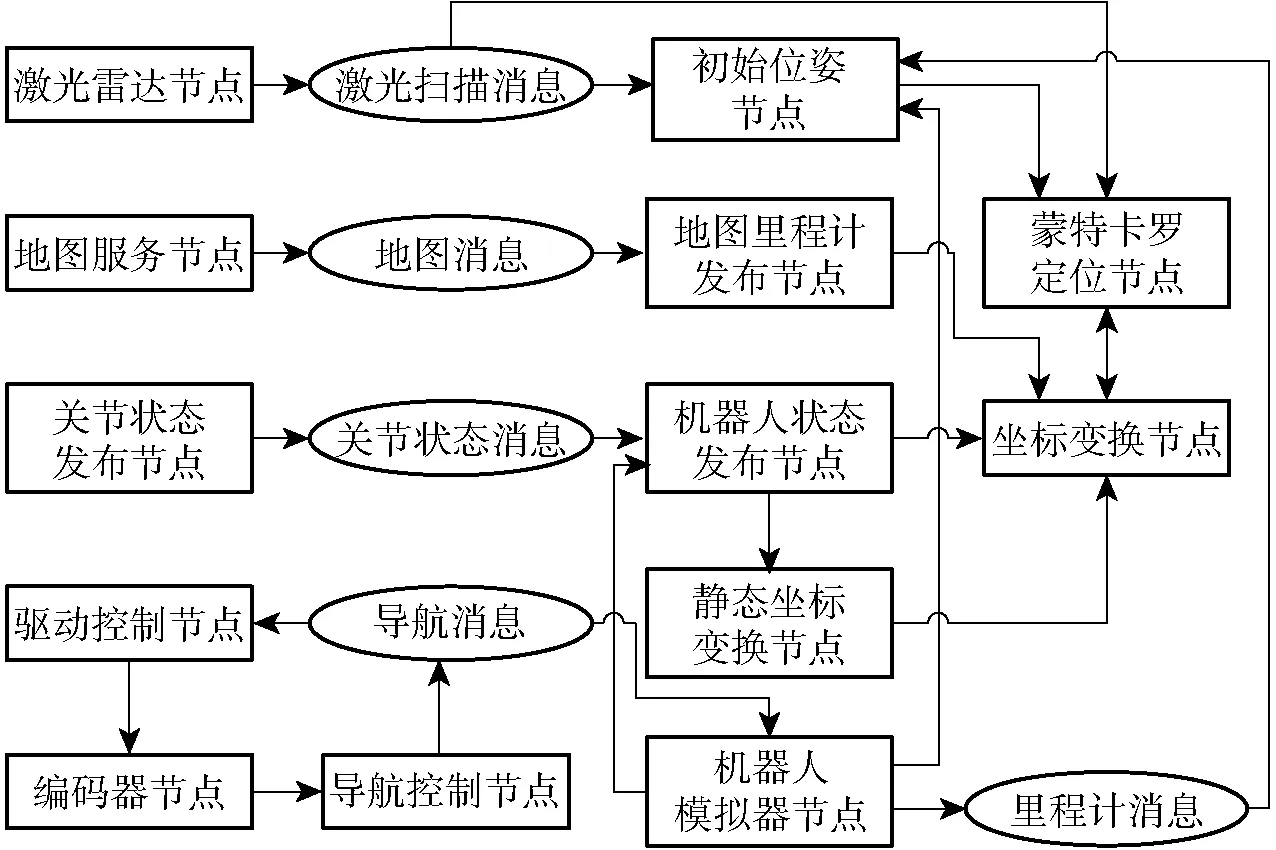
图7 导航定位ROS节点关系图Fig.7 ROS node relationship of navigation
蒙特卡罗定位节点是整个导航定位算法的核心。蒙特卡罗定位节点订阅激光扫描消息、地图消息、坐标变换消息、里程计消息和初始位姿消息,通过基于粒子滤波的状态估计,发布概率最大的位姿消息。
导航控制节点是导航控制服务的关键。导航控制节点根据机器人当前位姿消息和目标点位姿,发布车体控制消息。驱动控制节点订阅消息,将其解析为差动轮转速,传递给伺服电机驱动。编码器节点采集编码器反馈数据并发布到导航控制节点实现闭环控制。
机器人模拟器节点是虚拟机器人,计算并发布理想状态下机器人移动产生的里程计信息,为蒙特卡罗定位节点提供航迹推测的数据。
2 试验
2.1 导航试验设计
巡检导航定位试验,旨在检验巡检机器人导航系统的精度与可靠性。试验地点选择中国农业大学信息与电气工程学院试验中心室内环境。为准确测量机器人停车位置与姿态,随机抽取机器人巡检路线的4个关键点粘贴定位坐标纸。巡检导航定位试验场景如图8所示。选定机器人车体上的6个边界点作为相对参考位置,机器人到达目标关键点停稳后,将边界点位置标记到坐标纸上。

图8 巡检导航定位试验场景Fig.8 Scene of inspection navigation positioning experiment
试验共进行10次完整的巡检导航,每次试验后将机器人初始位置复位,避免误差累积影响试验结果,保证试验独立性。试验中设置机器人移动速度为1 m/s。
2.2 试验数据
图9是机器人边界点的位置分布图,可直观反映巡检机器人导航系统具有较高的导航精度。

图9 机器人边界点位置分布图Fig.9 Position map of robot boundary points
进一步对巡检机器人导航精度进行定量分析,在4个关键点处,分别计算机器人的6个边界点位置偏差和绝对航向偏差(即导航偏差),如图10所示。图中实线表示不同边界点的位置偏差,虚线表示航向偏差。
4个关键点位置的数据对比分析如表3所示。由表3可知,在1 m/s的速度下,巡检机器人的位置与航向偏差的平均绝对误差(MAE)分别小于5 cm和1.1°,标准差(SD)分别小于5 cm和1.5°。综上,巡检机器人导航系统具有较高的导航定位精度与稳定性,而且激光导航过程中无需GNSS等绝对定位设备的辅助,能够满足室内外各类巡检任务的导航定位要求。
巡检导航系统可进行的改进:
(1)全局最优路径通过离线方式计算获取,可考虑开发机器人自主路径规划策略。
(2)机器人未针对巡检中可能存在的障碍物提出检测避障方法,安全性有待加强。
(3)可以将机器视觉或惯性测量单元与机器人系统融合进一步提高定位精度。
3 结论
(1)搭建了基于激光雷达的巡检机器人导航系统硬件平台。该平台采用模块化的硬件结构设计、分层式的软件结构设计。其中,数据量大、实时性低的数据运算由工业PC机实现,数据量小、实时性高的数据由嵌入式主板实现,合理利用了硬件资源,兼顾了巡检机器人对数据通量与响应速度的要求。结合远程监控平台,实现巡检机器人的远程管控,完成了巡检机器人导航系统开发。
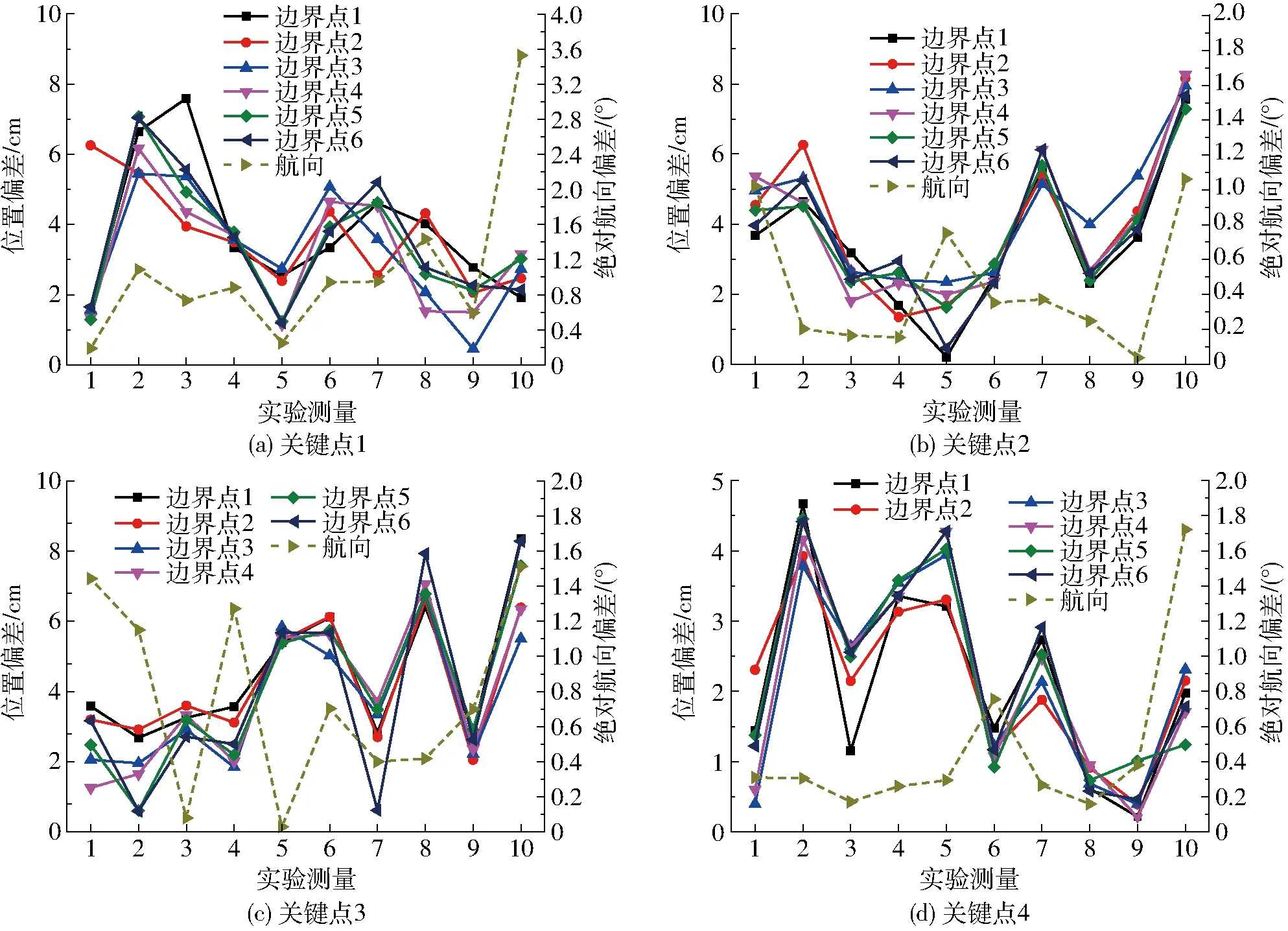
图10 各关键点位置的导航偏差Fig.10 Deviation of navigation at each key point
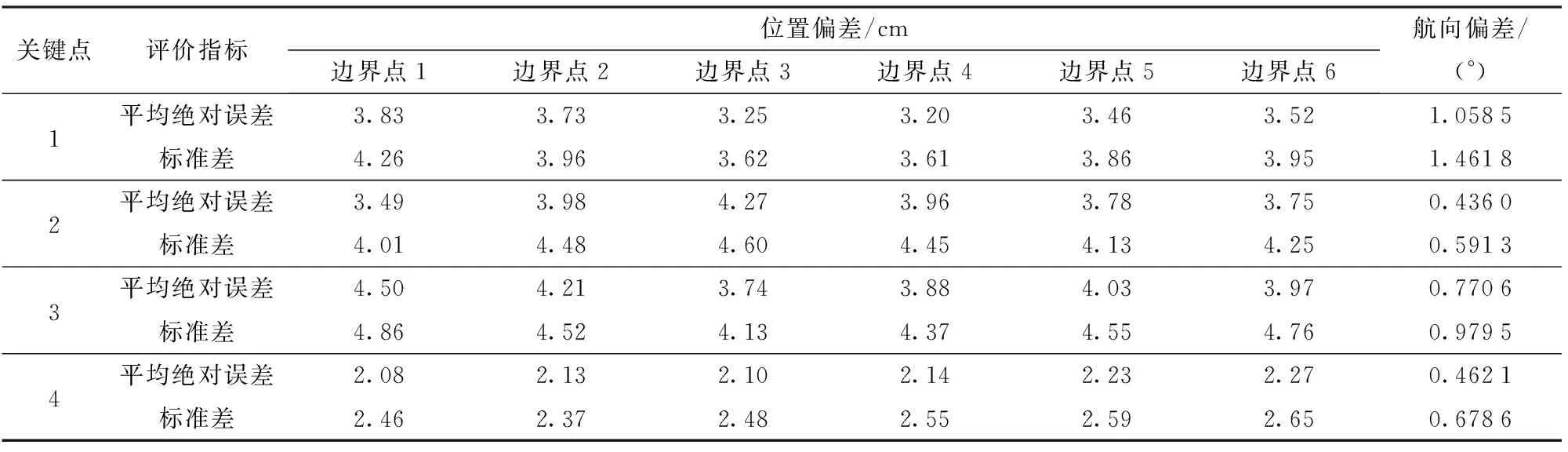
关键点评价指标位置偏差/cm边界点1边界点2边界点3边界点4边界点5边界点6航向偏差/(°)1平均绝对误差3.833.733.253.203.463.521.0585标准差4.263.963.623.613.863.951.46182平均绝对误差3.493.984.273.963.783.750.4360标准差4.014.484.604.454.134.250.59133平均绝对误差4.504.213.743.884.033.970.7706标准差4.864.524.134.374.554.760.97954平均绝对误差2.082.132.102.142.232.270.4621标准差2.462.372.482.552.592.650.6786
(2)巡检机器人软件的核心部分控制层基于ROS操作系统实现,采用分布式的节点发布/订阅方式,使各功能算法模块间解耦,便于后续对软件算法的进一步完善开发。
(3)经巡检导航定位试验测试,巡检机器人导航系统的位置与航向偏差的平均绝对误差分别小于5 cm和1.1°,标准差分别小于5 cm和1.5°,能够满足各类巡检任务中的导航定位需求。
1 杨旭东, 黄玉柱, 李继刚, 等. 变电站巡检机器人研究现状综述[J]. 山东电力技术, 2015, 42(1): 30-34.
YANG Xudong, HUANG Yuzhu, LI Jigang, et al. Research status review of robots applied in substations for equipment inspection[J]. Shandong Electric Power, 2015, 42(1): 30-34. (in Chinese)
2 SHUKLA A, KARKI H. Application of robotics in onshore oil and gas industry—a review part I[J]. Robotics and Autonomous Systems, 2016, 75(B): 490-507.
3 SHUKLA A, KARKI H. Application of robotics in offshore oil and gas industry—a review part II[J]. Robotics and Autonomous Systems, 2016, 75(B): 508-524.
4 PRAVEENA R, SRIMEENA R. Agricultural robot for automatic ploughing and seeding[C]∥2015 IEEE Technological Innovation in ICT for Agriculture and Rural Development (TIAR), IEEE, 2015: 17-23.
5 KOMASILOVS V, STALIDZANS E, OSADCUKS V, et al. Specification development of robotic system for pesticide spraying in greenhouse[C]∥2013 IEEE 14th International Symposium on Computational Intelligence and Informatics (CINTI) IEEE, 2013: 453-457.
6 向光海. 变电站巡检机器人路径规划系统设计与实现[D]. 成都:西南交通大学, 2015.
XIANG Guanghai. Design and implementation of route planning system of a substation inspection robot[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese)
7 史思总. 基于ROS的室内变电站设备巡检机器人定位技术[D]. 成都:西南科技大学, 2016.
SHI Sizong. Positioning technology of indoor substation equipment inspection robot based on ROS[D]. Chengdu: Southwest University of Science and Technology, 2016. (in Chinese)
8 YUN H B, KIM S H, WU L, et al. Development of inspection robots for bridge cables[J]. The Scientific World Journal, 2013, 2013(4):967508.
9 MONTERO R, VICTORES J G, MARTINEZ S, et al. Past, present and future of robotic tunnel inspection[J]. Automation in Construction, 2015, 59: 99-112.
10 MIAO R, PANG S. Development of a low-cost remotely operated vehicle for ocean exploration[C]∥OCEANS’15 MTS/IEEE, 2015: 1-7.
11 KHADHRAOUI A, BEJI L, OTMANE S, et al. Stabilizing control and human scale simulation of a submarine ROV navigation[J]. Ocean Engineering, 2016, 114: 66-78.
13 BENGOCHEA-GUEVARA J M, CONESA-MUOZ J, ANDJAR D, et al. Merge fuzzy visual servoing and GPS-based planning to obtain a proper navigation behavior for a small crop-inspection robot[J]. Sensors, 2016, 16(3): 276.
14 MAHMUD M S A, ABIDIN M S Z, MOHAMED Z. Development of an autonomous crop inspection mobile robot system[C]∥2015 IEEE Student Conference on Research and Development (SCOReD), 2015: 105-110.
15 王金钗. 变电站巡检机器人磁导航系统设计与实现[D]. 成都:西南交通大学, 2015.
WANG Jinchai. The design of magnetic navigation system for substation inspection robot[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese)
16 谢德胜, 徐友春, 万剑, 等. 基于RTK-GPS的轮式移动机器人轨迹跟随控制[J]. 机器人, 2017, 39(2): 221-229.
XIE Desheng, XU Youchun, WAN Jian, et al. Trajectory tracking control of wheeled mobile robots based on RTK-GPS[J]. Robot, 2017, 39(2): 221-229. (in Chinese)
17 刘军, 袁俊, 蔡骏宇, 等. 基于GPS/INS和线控转向的农业机械自动驾驶系统[J]. 农业工程学报, 2016, 32(1): 46-53.
LIU Jun, YUAN Jun, CAI Junyu, et al. Autopilot system of agricultural vehicles based on GPS/INS and steer-by-wire[J]. Transactions of the CSAE, 2016, 32(1): 46-53. (in Chinese)
18 魏苇. 基于差分GPS的变电站巡检机器人定位导航系统的研究[D]. 哈尔滨:哈尔滨工业大学, 2015.
WEI Wei. The location and navigation system of substation inspecting robot based on RTK GPS[D]. Harbin: Harbin Institute of Technology, 2015. (in Chinese)
19 陈新伟, 孟祥刚, 阙雅静, 等. 基于IMU的移动机器人精确角度获取方法[J]. 闽江学院学报, 2017, 38(2): 20-27.
CHEN Xinwei, MENG Xianggang, QUE Yajing, et al. Precise angle acquisition method for mobile robot based on IMU[J]. Journal of Minjiang University, 2017, 38(2): 20-27. (in Chinese)
20 薛阳, 江天博, 张晓宇. 基于视觉的变电站巡检机器人导航线提取方法[J]. 广东电力, 2015, 28(12): 13-18.
XUE Yang, JIANG Tianbo, ZHANG Xiaoyu. Vision based extraction method for navigation line of substation inspection robot[J]. Guangdong Electric Power, 2015, 28(12): 13-18. (in Chinese)
21 赵坤. 变电站智能巡检机器人视觉导航方法研究[D]. 保定:华北电力大学, 2014.
ZHAO Kun. Research on visual navigation of intelligent patrol robot in the substation[D]. Baoding: North China Electric Power University, 2014. (in Chinese)
22 张浩. 基于激光点云数据的变电站巡检机器人导航方法研究[D]. 保定:华北电力大学, 2015.
ZHANG Hao. Research on navigation method of substation inspection robot based on the lase point cloud[D]. Baoding: North China Electric Power University, 2015. (in Chinese)
23 薛金林, 张顺顺. 基于激光雷达的农业机器人导航控制研究[J/OL]. 农业机械学报, 2014, 45(9): 55-60. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140909&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.09.009.
XUE Jinlin, ZHANG Shunshun. Navigation of an agricultural robot based on laser radar[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9): 55-60. (in Chinese)
24 贾士伟, 李军民, 邱权, 等. 基于激光测距仪的温室机器人道路边缘检测与路径导航[J]. 农业工程学报, 2015, 31(13): 39-45.
JIA Shiwei, LI Junmin, QIU Quan, et al. New corridor edge detection and navigation for greenhouse mobile robots based on laser scanner[J]. Transactions of the CSAE, 2015, 31(13): 39-45. (in Chinese)
25 钱晓明, 张浩, 王晓勇,等. 基于激光扫描匹配的移动机器人相对定位技术研究[J/OL]. 农业机械学报, 2016, 47(3):14-21. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160303&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.03.003.
QIAN Xiaoming, ZHANG Hao, WANG Xiaoyong, et al. Relative localization technology for mobile robot based on laser scan matching[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3):14-21. (in Chinese)
26 周俊, 胡晨. 密植果园作业机器人行间定位方法[J/OL]. 农业机械学报, 2015, 46(11):22-28. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151104&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.004.
ZHOU Jun, HU Chen. Inter-row localization method for agricultural robot working in close planting orchard[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11):22-28. (in Chinese)
27 SANTOS J M, PORTUGAL D, RUI P R. An evaluation of 2D SLAM techniques available in robot operating system[C]∥IEEE International Symposium on Safety, Security, and Rescue Robotics. IEEE, 2014:1-6.