玉米直插穴播机强排-强启排种装置设计与试验
2018-03-13石林榕赵武云杨小平孙步功
石林榕 赵武云 杨小平 孙步功 孙 伟
(甘肃农业大学机电工程学院, 兰州 730070)
0 引言
甘肃省地理环境恶劣,十年九旱,地膜覆盖技术能最大效应增温保墒[1]。目前国内多数覆膜播种机采用先播种后铺膜模式,出苗前需人工或者机械破膜放苗,增加作业工序和劳动强度。膜上打孔播种技术在膜上打孔播种,省去了放苗工序[2]。西北地区的“秋覆膜”和“顶凌覆膜”较传统覆膜优势明显[3-4],“秋覆膜”是秋季覆膜保住3个月(7—9月)的降雨,为来年4月种玉米发芽生根之用;“顶凌覆膜”是避免地表在“昼消夜冻”过程中损失墒情,然而播种难度较大。针对两种覆膜方式甘肃省仍普遍采用人工或简易机械,劳动强度高、播种合格率低。国内研发成熟的膜上播种机几乎均以滚轮式播种机为主[5-6],播种较浅作物时,成穴器运动轨迹余摆线对地膜影响不大,播种较深作物时,易产生挑膜、刮膜等问题,西北多风会加剧膜孔开裂;同时,种子周围土壤扰动大,造成种子发芽周期较长。直插播种技术采用打孔器对地膜覆盖的土壤进行打孔,仅在穴孔位置开膜切开,利于保墒和抗旱。
陈晓光等[7]首次提出直插播种原理,此后国内对直插播种机构进行了大量研究。刘军干等[8]采用平行四杆机构应用于小麦直插式覆膜穴播机中,由于穴播过程中鸭嘴水平位移量较大,存在严重的挑膜、撕膜问题。赵建托等[9]设计的玉米全膜双垄沟播直插穴播机采用凸轮和曲柄组合机构控制鸭嘴的穴播过程,实现播种时间段成穴器水平绝对速度为零,基本解决了撕膜等问题。赵武云等[10]采用凸轮-曲柄滑块机构、运动放大机构实现了成穴器的“零速”投种。戴飞等[11]通过应用转动导杆机构与正弦机构进行串联,运动放大机构放大补偿速度实现“零速”播种,由于机构复杂,机构运行不可靠。以上机具均将种箱和鸭嘴分离,通过排种管连接,鸭嘴随穴播杆作往复回转运动,增加种子在排种管内的停留时间,易造成空穴。为解决此问题,石林榕等[12-13]设计了转动导杆驱动平行四杆机构,完成整机前进速度补偿,同时该机将种箱和排种机构安装在穴播杆上,减少了排种器排种时间,但同时增加了穴播杆的回转惯性;由于该机通过地面与穴播杆的相对位移实现排种轮排种和鸭嘴开启,当遇到不平度较高地面时,易造成漏播。
针对以上问题,在电驱式小区玉米膜上直插穴播机的基础上[13-17],为提高玉米直插穴播机的可靠性及穴粒数合格率,设计强排-强启排种装置,重点对强排-强启排种器和强排-强启同步机构共轭凸轮进行分析计算和试验验证。
1 整机机构与工作原理
1.1 整机结构
图1为玉米直插穴播机结构图。玉米直插穴播机主要由机架、减速电动机、强排-强启排种装置、前进速度补偿机构、蓄电池、共轭凸轮机构、差速器和牙嵌式电磁离合器等组成。
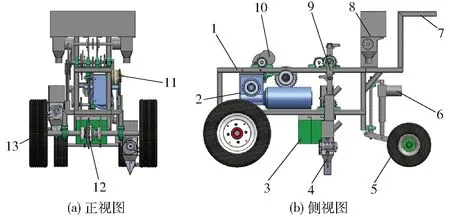
图1 玉米直插穴播机结构图Fig.1 Structure diagram of corn insert plot hill-drop planter1.机架 2.减速电动机 3.蓄电池 4.强排-强启排种器 5.后轮 6.直线推杆 7.把手 8.排种装置 9.前进速度补偿机构10.共轭凸轮机构 11.牙嵌式电磁离合器 12.差速器 13.前轮
1.2 动力传递过程
玉米直插穴播机的动力传递过程如图2所示。运动时,电动机的转动经过减速箱减速,一侧通过链传递至差速器,差速器驱动地轮前进,另一侧通过链传递至离合器。整机行走时,离合器动力断开,作业时,离合器切合通过链传动将动力分别传递给共轭凸轮机构、前进速度补偿机构和外槽轮排种轮,为保证3个机构的同步性,连接共轭凸轮机构、前进速度补偿机构和外槽轮排种轮的链轮齿数相同,其中外槽轮上仅有一取种窝眼,前进速度补偿机构能实现穴播过程的“零速”入穴出穴,在前进速度补偿机构的穴播杆入穴时共轭凸轮机构通过拉线拉动取种间歇机构进行取种并将种子提前投入鸭嘴内,当鸭嘴开始上升时,拉线拉启活动鸭嘴,种子在重力作用下掉入穴孔内,待鸭嘴完全脱离土壤后,鸭嘴在拉簧的作用下闭合,间歇机构在扭簧的作用下恢复初始位置,与此同时,外槽轮排种旋转一周完成一次取种任务,种子通过输种管落入小种盒内,完成一个周期的排种过程。

图2 动力传递过程示意图Fig.2 Process of power transfer1.电动机 2.减速箱 3.差速器 4.地轮 5.离合器 6.共轭凸轮机构 7.拉线 8.前进速度补偿机构 9.取种间歇机构 10.活动鸭嘴 11.固定鸭嘴 12.外槽轮排种轮
1.3 工作原理
如图1、2所示,作业时,玉米直插穴播机减速电动机驱动差速器使整机以一定速率前进;同时电动机驱动前进速度补偿机构,使整机前进时鸭嘴在播种期间能相对于地面基本实现直下直上。同时电动机带动共轭凸轮机构,拉动强排-强启排种器的排种轮转动取种及活动鸭嘴开启排种。电动机也驱动排种装置的槽轮式排种轮转动排种。为减小强排-强启排种器回转运动中的惯性,强排-强启排种装置上设小种箱,排种装置设大种箱,大种箱内的种子在外槽轮排种器的协助下通过排种管输入小种箱,使强排-强启排种器内的种群数保持一致。后轮可通过直线推杆调节高度。当平地穴播时,使后轮和前轮高度保持一致;当垄沟穴播时,前轮骑行于沟底,后轮行走于垄面,需缩短直线推杆长度;为避免运输过程中地面与鸭嘴发生接触,增大直线推杆长度。强排-强启排种器与穴播杆通过2个滑块垂直连接,上滑块与穴播杆通过压簧连接,当遇到地面不平时,可在一定程度满足播深一致。遇到坚硬地面或石块时压簧被压缩,鸭嘴得到保护。
2 强排-强启排种装置设计
2.1 前进速度补偿机构
如图3所示,前进速度补偿机构主要由动力输入曲柄、导杆、主动曲柄、穴播杆和从动曲柄等组成,动力输入曲柄和导杆组成转动导杆机构,由机架、主动曲柄、穴播杆和从动曲柄组成平行四杆机构。该机构核心功能为转动导杆机构将动力输入曲柄的匀速转动转化为导杆的周期性非匀速转动,由于导杆与主动曲柄垂直固定安置,非匀速转动的主动曲柄带动平行四杆机构中穴播杆在向下运动一定区间内相对地面直上直下,即在前进速度补偿期间穴播杆入土到出土时前进速度接近于零,保证了鸭嘴对玉米生长周围种床(上虚下实)破坏少,减少了鸭嘴对地膜撕裂等问题。

图3 前进速度补偿机构图Fig.3 Structure diagram of forward speed compensation device1.导杆 2.动输入曲柄 3.主动曲柄 4.穴播杆 5.从动曲柄
2.2 穴播关键时间点
根据前进速度补偿机构穴播过程中关键动作确定穴播关键时间点,穴播过程中关键动作由鸭嘴入土、鸭嘴出土、鸭嘴和排种轮恢复段组成。通过前进速度补偿机构运动仿真轨迹确定鸭嘴开始入土到穴底阶段主动齿轮的转角为7.54°~81.05°,此期间鸭嘴保持闭合;鸭嘴从穴底到出穴阶段主动齿轮的转角为81.05°~179.05°,此期间鸭嘴保持开启;鸭嘴开口恢复阶段主动齿轮的转角为179.05°~361.88°,此期间前期鸭嘴闭合。如图4所示。

图4 穴播周期内关键时间点Fig.4 Key time point during seeding period
为了保证设计的共轭凸轮和偏心齿轮机构共同协调完成强排-强启排种器的取种和排种动作,需准确确定共轭凸轮和主动偏心齿轮初始安装角,图5所示为一个穴播周期内关键时间点与主动偏心齿轮转角关系。
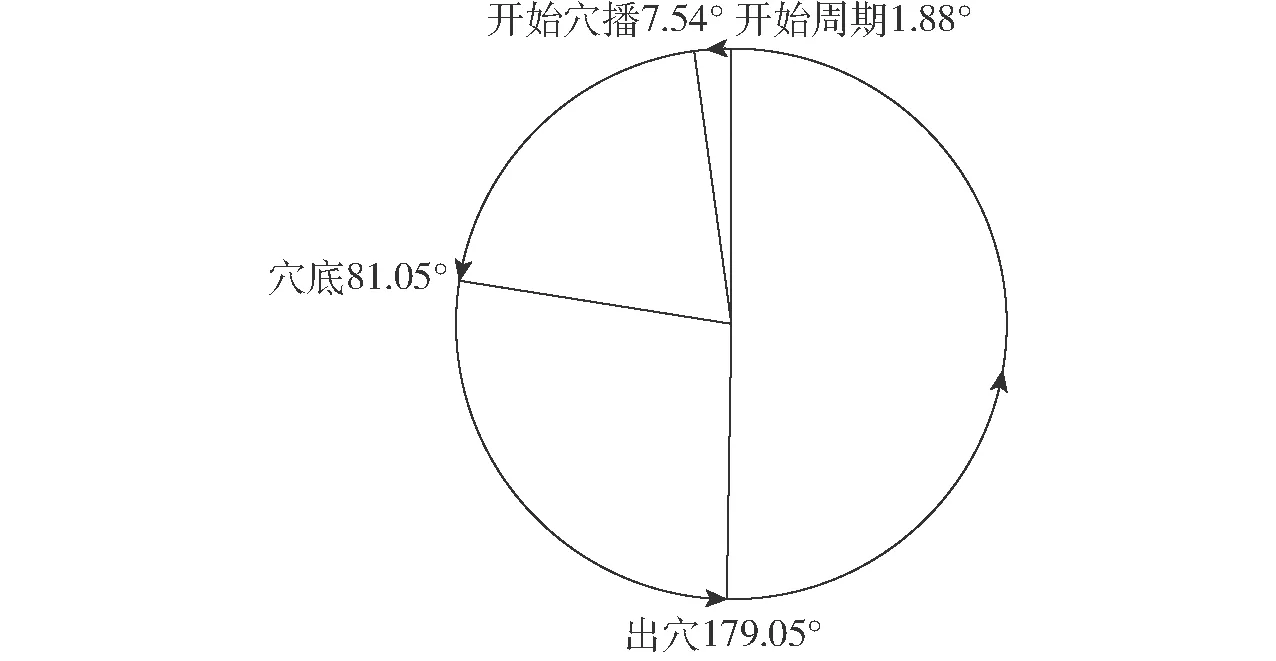
图5 穴播周期内关键时间点与主动齿轮转角关系Fig.5 Relationship between key time point during seeding period and driving gear rotation
2.3 排种器运动分析
为减小排种器体积,同时扭杆有效长度需大于排种轮半径和安装尺寸,最终扭杆有效长度l2设计为60 mm,因此排种轮排种期间滑杆需要上滑l1使排种轮排种一次,如图6a所示。在此过程中,鸭嘴开启拉杆在滑槽内滑动,未对活动鸭嘴发生作用。滑杆上滑位移l1为
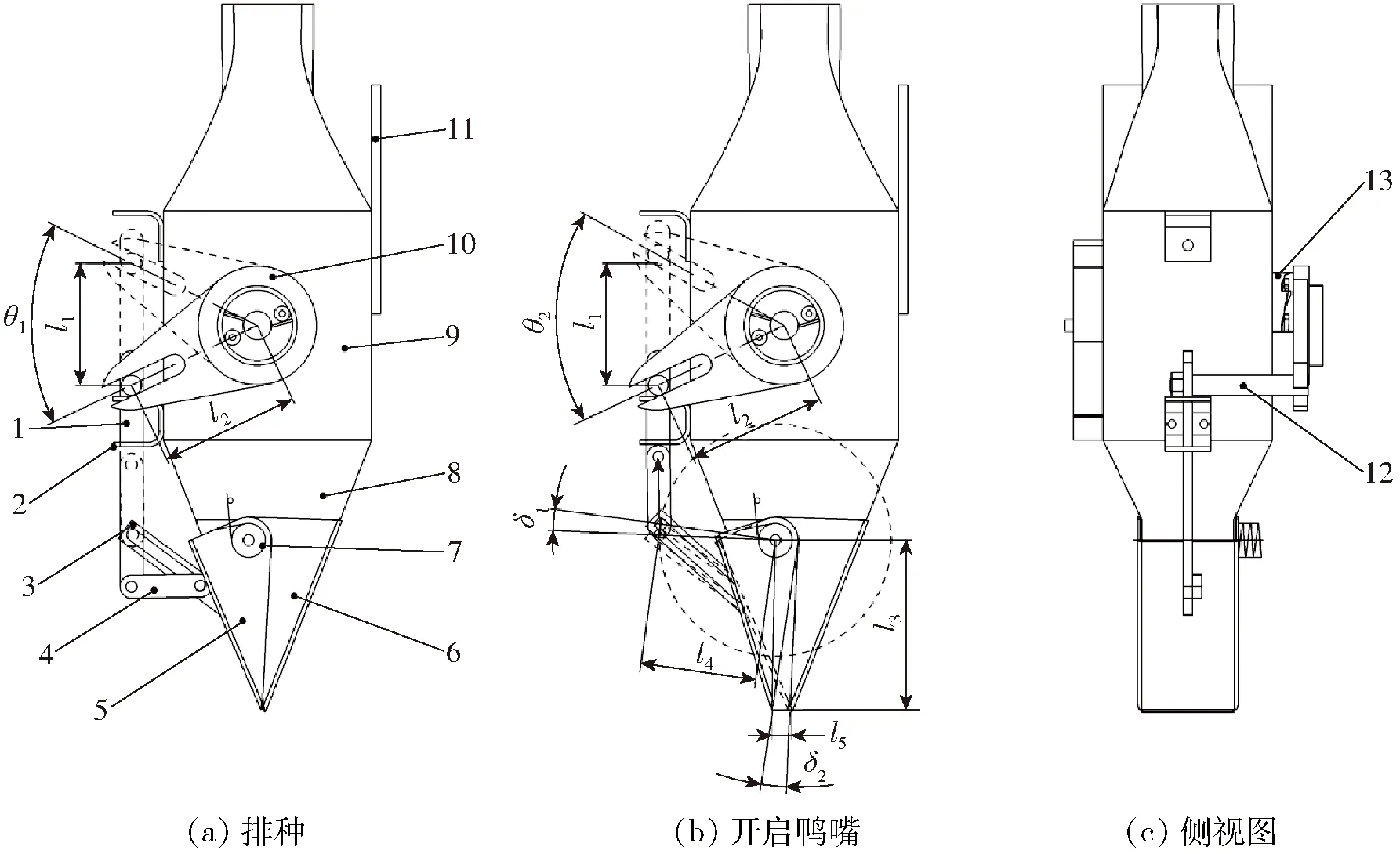
图6 排种器运动分析Fig.6 Analysis for motion of seed metering device1.滑杆 2.滑杆支座 3.连杆 4.鸭嘴开启拉杆 5.活动鸭嘴 6.固定鸭嘴 7.扭簧 8.鸭嘴固定盒 9.排种盒 10.扭杆 11.安装座 12.带杆 13.排种轮
(1)
式中θ1——排种轮排种一次转角,(°)
如图6b所示,当排种轮旋转满足排种角度后,还需随滑杆向上移动一定距离拉起活动鸭嘴,滑杆增加位移Δl为
(2)
式中l′2——扭杆排种和鸭嘴开启有效长度,mm
θ2——排种轮排种一次转角和鸭嘴开启转角的和,(°)
鸭嘴开启拉杆拉起活动鸭嘴绕鸭嘴旋转中心旋转,角度较小,滑杆增加位移等于绕鸭嘴旋转中心转动弧长为
式中δ1——鸭嘴开启拉杆拉起活动鸭嘴转角,(°)
l4——滑槽上端到旋转中心间的距离,mm
根据实际播种玉米尺寸统计情况,同时为避免有较多土壤进入鸭嘴,开口不宜过大,活动鸭嘴开口应与玉米最大长相当。设定活动鸭嘴开口大小为l5,根据角速度相等原理可得
(3)
其中
(4)
式中δ2——活动鸭嘴嘴尖转角,(°)
l3——活动鸭嘴嘴尖到旋转中心间距离,mm
l5——活动鸭嘴嘴尖开口量,mm
2.4 排种机构设计
为提高型孔充填能力,取种过程排种轮匀速转动,即角速度为常数,如图7所示。排种轮转动线速度为
vp=θ1l2
(5)
其中
式中z——窝眼型孔数,个
图7 窝眼轮运动分析Fig.7 Analysis of movement of eye socket
排种轮转动线速度垂直分速度为
(6)
式中T——穴播一个周期的时间,s
v1——向上拉丝速度,mm/s
对式(6)求导可得拉杆运动按正弦函数加速度运动,加速度为
(7)
窝眼轮型孔数为
(8)
式中dw——窝眼轮直径,m
vm——播种机前进速度,m/s
S——株距,m
窝眼轮直径不宜太小,因其曲率大,不利于种子充填型孔而造成漏播。为缩小排种器体积,窝眼轮直径设为46 mm。窝眼轮上型孔数越多,则窝眼轮线速度越低,有利于提高型孔充填性能,但型孔数又受窝眼轮直径和型孔间相隔距离限制。由文献[18]可知玉米种子受鸭嘴向上惯性影响,前进速度限制低于170 mm/s,本文前进速度vm取170 mm/s,株距330 mm,穴播周期为1.94 s。据式(2)估算及排种轮平稳取种要求,排种轮圆周方向设7行孔穴,排种轮旋转2π/7排种一次。通过仿真可知鸭嘴由入土到穴底0.47 s期间需取种一次,由此排种轮角速度为1.9 rad/s。计算结果如表1所示。

表1 排种器运动参数计算结果Tab.1 Calculation result for motion parameters of seed metering device
2.5 凸轮机构设计
单凸轮的强排机构需使用弹簧或者重力恢复初始位置,弹簧长时间工作后会产生弹簧松弛,造成穴播鸭嘴开启不稳定,影响播种效果。共轭凸轮具有加载力、波动和噪声小等优点[18-19]。为使排种轮排种和开启活动鸭嘴便于排种,通过式(1)计算得到拉杆位移为52.06 mm。由式(2)计算得到拉杆开启鸭嘴增加的位移为8.13 mm。为使拉杆复位可靠,避免使用弹簧,在生成主动凸轮的基础上,设计了从动凸轮,图8所示为设计的共轭凸轮。为减小体积和满足一定强度要求,凸轮基圆半径R设为60 mm(图9a),凸轮推程阶段分两步,第1步凸轮推程7.54°~81.05°期间,拉杆位移l1为52.06 mm(图9b);第2阶段凸轮推程81.05°~83°期间,拉杆增加位移l′1为8.13 mm(图9c);鸭嘴排完种后不能将鸭嘴闭合,防止鸭嘴夹土影响下一次排种,因此凸轮保持阶段为83°~179.05°(图9d),在此期间滑杆保持拉开鸭嘴直到鸭嘴离开穴孔,防止鸭嘴过早关闭出现夹土问题。
图8 共轭凸轮构件Fig.8 Component of conjugate cam1.主动凸轮 2.从动凸轮 3.拉杆 4.主轴承 5.副轴承 6.拉板

图9 共轭凸轮运动简图Fig.9 Analysis for motion carillon
3 试验

图10 样机田间试验Fig.10 Field test of prototype
玉米直插穴播机强排-强启排种装置田间播种性能试验于2017年6月8日在甘肃农业大学试验田进行。样机试验如图10所示,试验地南北走向、呈矩形,土壤为沙壤土,含水率为10.5%~13.6%,40 mm深度土壤坚实度平均值为124 kg/cm2,地温平均值为24.5℃。试验机具前进速度为0.17 m/s。试验地依照甘肃玉米播种技术(平铺膜宽70 cm),覆膜厚度为0.01 mm。玉米种植品种为陇单339号,千粒质量为371 g,种子外形尺寸平均值为87 mm×75 mm×45 mm。按照NY/T 987—2006《铺膜穴播机作业质量》对播种机作业性能的测定要求,计算玉米直插穴播机强排-强启排种装置膜上播种作业时种子空穴率、穴粒数合格率。以200 mm长单膜为1个作业小区,测定点为5个小区内所有的穴孔,记录穴孔内的种数。性能参数计算公式为

(9)
式中f——总膜孔数,个
kh——空穴数,个
Hk——空穴率,%
lh——穴粒数合格穴数,个
Hl——穴粒数合格率,%
bh——膜下播种深度合格穴数,个
Hb——膜下播种深度合格率,%
由试验结果可知,玉米直插穴播机强排-强启排种装置的空穴率为1.8%、穴粒数合格率为95.3%、膜下播种深度合格率为88.1%,试验指标均符合相应指标要求。与文献[13]中玉米直插穴播机的播种性能相比,该机穴粒数合格率提高了2.3%,空穴率增加了38.89%。分析原因,由于该机的取种轮在压力一定的种群条件下单粒取种精度提高,穴粒数合格率有所提高;试验中发现鸭嘴开启从穴底向上运动时,鸭嘴周围土壤会干扰种子落入穴孔,造成个别种子掉落垄面,按空穴计算致使该机空穴率增加。
试验过程中发现,玉米直插穴播机强排-强启排种装置传动运行平稳,装置传动运行平稳,能完成取种和排种动作,鸭嘴无提早排种问题。总体而言,采用强排-强启排种装置的玉米直插穴播机满足农艺技术要求和玉米播种机的基本作业质量标准要求。
4 结束语
采用共轭凸轮和强排-强启排种器联合作用实现玉米种子有效取种和强排,避免了地面不平度对播种性能的影响,试验结果表明,玉米直插穴播机强排-强启排种装置的空穴率为1.8%、穴粒数合格率为95.3%、膜下播种深度合格率为88.1%;装置传动运行平稳,能完成取种和排种动作,鸭嘴无提早排种问题,满足玉米播种的设计要求和农艺技术要求。
1 杨祁峰,刘广才,熊春蓉,等.旱地玉米全膜双垄沟播技术的水分高效利用机理研究[J]. 农业现代化研究,2010,31(1):113-116.
YANG Qifeng, LIU Guangcai, XIONG Chunrong, et al. Study on highly efficient water utilizing mechanisms on techniques of whole plastic-film mulching on double ridges and planting in catchment furrows of dry-land maize[J]. Research of Agricultural Modernization, 2010, 31(1): 113-116. (in Chinese)
2 陈学庚,卢勇涛. 气吸滚筒式棉花精量穴播器排种性能试验[J]. 农业机械学报,2010,41(1):35-38.
CHEN Xuegeng, LU Yongtao. Sowing-performance of air-suction cylindrical cotton precision dibble[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(1): 35-38. (in Chinese)
3 刘晓伟,何宝林,郭天文,等. 秋覆膜对旱地玉米土壤水分和产量的影响[J]. 农学学报,2011,1(8):9-15.
LIU Xiaowei, HE Baolin, GUO Tianwen, et al. Effects of full mulching on double ridges in autumn on soil water content and yield of dryland maize[J]. Journal of Agriculture, 2011, 1(8): 9-15. (in Chinese)
4 刘淑梅,于宏,柳芳. 早春顶凌覆膜土壤水分变化规律初探[C]∥全国农业气象与生态环境学术年会,2006.
5 王吉奎,郭康权,吕新民,等.改进型夹持式棉花穴播轮排种过程高速摄像分析[J]. 农业机械学报,2011,42(10):74-78.
WANG Jikui, GUO Kangquan, LÜ Xinmin, et al. High-speed photography analysis on operating process of improved clamping dibbler for cotton[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 74-78. (in Chinese)
6 王吉奎,郭康权,吕新民.夹持式穴播轮种子室内种子运动分析[J].农业工程学报,2012,28(11):35-39.
WANG Jikui, GUO Kangquan, LÜ Xinmin. Analysis on seed movement in seed chamber of clamping dibber wheel[J]. Transactions of the CSAE, 2012, 28(11): 35-39. (in Chinese)
7 陈晓光,左春柽,高峰. 直插式播种机的研究——Ⅰ. 直插式成穴器[J]. 农业工程学报,1993,9(3):66-77.
CHEN Xiaoguang, ZUO Chuncheng, GAO Feng. Study on the direct insert planter (Ⅰ) The research and the principal study of the direct insert hole former of planter[J]. Transactions of CSAE, 1993, 9(3): 66-77. (in Chinese)
8 刘军干,王天辰,阎发旭,等. 直插式覆膜小麦穴播机的设计[J]. 农业工程学报,2001,17(5):55-58.
LIU Jungan, WANG Tianchen, YAN Faxu, et al. Design of film-mulching wheat hill seeder with vertical dropping mechanism[J]. Transactions of CSAE, 2001, 17(5): 55-58. (in Chinese)
9 赵建托,赵武云,任颜华,等. 玉米全膜覆盖双垄沟播机直插式播种装置设计与仿真[J]. 农业机械学报,2010,41(10):40-43.
ZHAO Jiantuo, ZHAO Wuyun, REN Yanhua, et al. Design and simulation of direct insert corn planting device of furrow seeder with whole plastic-film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 40-43. (in Chinese)
10 赵武云,戴飞,杨杰,等.玉米全膜双垄沟直插式精量穴播机设计与试验[J/OL]. 农业机械学报,2013,44(11):91-97.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131117&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.11.017.
ZHAO Wuyun, DAI Fei, YANG Jie, et al. Design and experiment of direct insert precision hill-seeder with corn whole plastic-film mulching on double ridges[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 91-97. (in Chinese)
11 戴飞,赵武云,石林榕,等. 基于近等速机构的玉米全膜双垄沟穴播机设计与试验[J/OL]. 农业机械学报,2016,47(11):74-81.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161110&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.11.010.
DAI Fei, ZHAO Wuyun, SHI Linrong, et al. Design and experiment of hill-seeder with whole plastic-film mulching on double ridges for corn based on mechanism with approximate constant speed[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 74-81. (in Chinese)
12 石林榕,赵武云,孙伟,等. 电驱式小区玉米膜上直插穴播机的研制与试验[J]. 农业工程学报,2017,33(4):32-38.
SHI Linrong, ZHAO Wuyun, SUN Wei, et al. Development and experiment of electric driving insert hill-drop planter on film for plot corn[J]. Transactions of the CSAE, 2017, 33(4): 32-38. (in Chinese)
13 石林榕,赵武云,孙伟,等. 电驱式玉米膜上直插穴播机前进速度补偿机构参数优化[J/OL]. 农业机械学报,2017,48(8):87-94. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170809&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.08.009.
SHI Linrong, ZHAO Wuyun, SUN Wei, et al. Parameters optimization of speed compensation mechanism of electric driving maize planter with dibbling on membrane[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 87-94.(in Chinese)
14 赵武云,吴建民,王芬娥,等. 旱地玉米全膜覆盖双垄沟播精密播种机:200910022858.7[P]. 2011-07-20.
15 赵武云,戴飞,张锋伟,等.全膜双垄沟玉米种植全程机械化作业方法: 201310492318.1[P]. 2015-04-01.
16 石林榕,吴建民,赵武云,等. 一种直插式成穴机构:201420489531.7[P]. 2014-12-10.
17 石林榕,吴建民,赵武云,等. 一种直插式成穴装置:201420488968.9[P]. 2014-08-28.
18 陈建能,王英,赵匀,等. 基于共轭凸轮的强制推秧机构反求设计[J]. 农业工程学报,2011,27(3):98-102.
CHEN Jianneng, WANG Ying, ZHAO Yun, et al. Reverse design of compulsory seedling-pushing mechanism based on conjugate cam[J]. Transactions of the CSAE, 2011, 27(3): 98-102.(in Chinese)
19 赵匀,樊福雷,宋志超,等. 反转式共轭凸轮蔬菜钵苗移栽机构的设计与仿真[J]. 农业工程学报,2014,30(14):8-16.
ZHAO Yun, FAN Fulei, SONG Zhichao, et al. Design and simulation of inverted vegetable pot seedling transplanting mechanism with conjugate cam[J]. Transactions of the CSAE, 2014, 30(14): 8-16.(in Chinese)