惯组飞行角振动环境测量与环境条件设计
2018-03-09王晓雷南宫自军戴婷婷李紫光
王晓雷,南宫自军,龙 梁,张 静,戴婷婷,李紫光
(1.北京宇航系统工程研究所,北京 100076;2.中国运载火箭技术研究院,北京 100076)
0 前言
火箭上惯组等姿态敏感设备在动态环境下的导航精度指标,一般通过地面多自由度振动试验进行考核,关键在于确定合理且覆盖真实飞行环境的多维振动环境试验条件[1-3]。其中火箭飞行的线振动环境可以通过常规的振动加速度传感器测量得到,而对于飞行的角振动环境,目前还没有实测方法和实测数据,一般根据经验确定角振动试验的量级,因此存在欠试验或过试验的现象,达不到准确考核惯组动态导航精度的效果[4-5]。
本文在总结型号研制经验的基础上,提出一种惯组的飞行角振动环境测量方法,该方法利用普通的振动加速度传感器测量火箭飞行的角振动环境,具有成本低、实现方便的特点。该技术已在某型火箭的飞行试验中成功应用,获取了惯组在飞行中的角振动环境实测数据,并依此包络设计惯组的飞行角振动环境试验条件。应用该技术可以避免以往仅凭经验确定角振动试验条件带来的风险,为考核惯组在多维振动环境下的动态导航精度提供接近真实飞行环境的试验条件。
1 测量方案
火箭飞行中,需要考虑惯组沿箭体俯仰方向和偏航方向的角振动环境。由于惯组一般通过安装支架(或惯组大梁)固定在仪器舱壁上[6],为了测量惯组在俯仰和偏航方向的角振动环境,可以采用图1所示的角振动环境测量方案。其中,图1(a)为四点测量方案,即在惯组大梁安装支腿的4个象限各布置1个极性相同的振动加速度传感器,分别测量各位置沿箭体轴向(垂直于纸面方向)的振动响应。为了减少振动测点,压缩飞行试验的测量通道数,也可以采用图1(b)的三点测量方案,即在惯组大梁安装支腿的任意3个象限各布置1个极性相同的振动加速度传感器,分别测量各位置沿箭体轴向的振动响应,其中1#和3#传感器距箭体中轴线(惯组大梁中心点O)的距离相同。
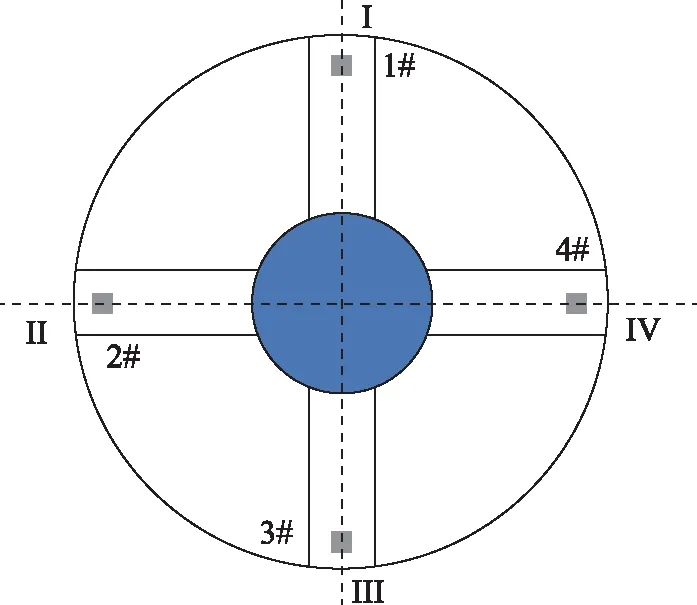
(a) 方案1:四点测量方案
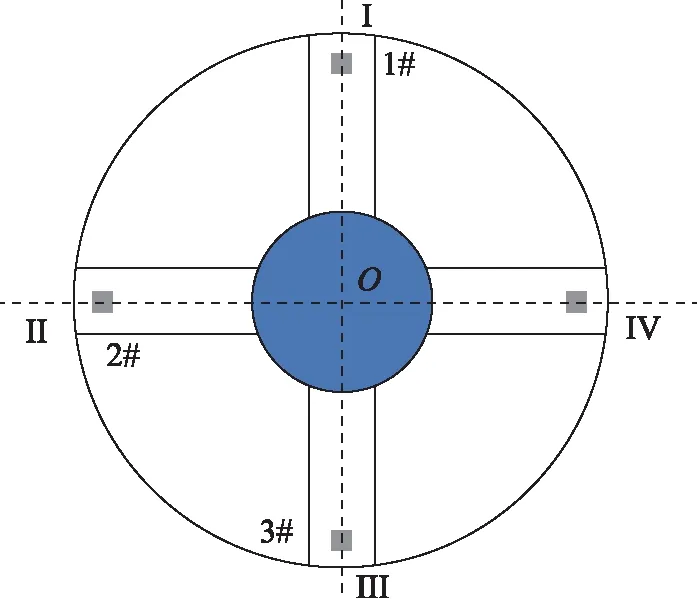
(b) 方案2:三点测量方案图1 测量角振动环境的加速度传感器位置示意图Fig.1 Illustration of acceleration sensors location for measuring the angular vibration environment
由于振动加速度传感器测量的是线振动信号,因此需要进行线振动信号与角振动信号的转换。对于图1(a)的四点测量方案,线振动与角振动的转换公式为:
(1)
(2)
式中:


L13、L24分别为1#与3#、2#与4#振动传感器之间的距离,单位为m;g为重力加速度(取值g=9.8m/s2)。
对于图1(b)的三点测量方案,其俯仰方向的角加速度计算公式仍为公式(1),偏航方向的角加速度计算公式为:
(3)
式中:

为了开展角振动环境条件设计,还需要将角加速度的时域信号转换为频域谱形。将角加速度时域信号变换为频域的功率谱密度的公式为:
(4)
(5)
式中:

G表示对振动时域信号进行功率谱密度变换[7-8];
将角加速度功率谱密度转换成角速度功率谱密度的公式为:
(6)
(7)
式中:

以上给出了惯组的线振动环境到角振动环境的数据处理公式。应用此方法测量角振动环境的前提是:1)各振动测点极性相同,并同步进行信号采集,以避免各测点采样不同步产生的相位误差;2)惯组安装支架(振动传感器安装处)的结构刚度足够大,以避免传感器安装位置的局部弹性响应大,导致测量的振动响应不能代表惯组整体的角运动。
2 试验验证
为了验证上述角振动环境测量方案的正确性,获取火箭飞行中惯组的角振动环境实测数据,在某型号飞行试验中,采用图1(b)的三点测量方案,在惯组大梁安装处布置了3个遥测振动传感器。根据飞行试验的遥测振动数据,应用上述数据处理公式进行数据处理,首次获得惯组在主动段和再入段飞行的角振动环境。
2.1 主动飞行段
图2是某型号飞行试验测量得到的主动飞行段惯组大梁安装处的振动时域信号,选取图中振动响应较大的时段进行角振动处理(3路信号取相同的时间段)。图3是通过数据处理得到的主动飞行段惯组角加速度功率谱密度曲线。可见,俯仰方向和偏航方向的角振动谱形比较接近。图中折线是根据角振动功率谱密度曲线包络制定的主动飞行段惯组的角振动环境试验条件,根据力学环境条件设计规范,在飞行实测包络的基础上增加约5dB余量作为惯组的角振动验收试验条件[9-10]。

图2 主动飞行段惯组安装处的振动遥测信号Fig.2 The vibration time history at a IMU’s fixing position during ascent stage

图3 主动飞行段惯组的角加速度功率谱密度Fig.3 PSD(Power Spectrum Density) of a IMU’s angular acceleration during ascent stage
2.2 再入飞行段
图4给出了再入飞行段惯组大梁安装处的振动时域信号,图中有4个时间段的振动量级比较大。通过对这4个时间段的振动信号进行处理(3路信号取相同的时间段),得到的惯组俯仰方向的角加速度功率谱密度见图5(a),偏航方向的角加速度功率谱密度见图5(b)。图中折线是根据角加速度功率谱密度曲线包络制定的再入飞行段惯组的角振动环境试验条件,同样在飞行实测包络的基础上增加约5dB余量作为角振动验收试验条件,作为再入段惯组角振动环境筛选试验的依据。

图4 再入飞行段惯组安装处的振动遥测信号Fig.4 The vibration time history at a IMU’s fixing position during reentry stage

(a) 俯仰方向

(b) 偏航方向图5 再入飞行段惯组的角加速度功率谱密度Fig.5 PSD(Power Spectrum Density) of a IMU’s angular acceleration during reentry stage
3 结论
本文提出的惯组飞行角振动环境测量技术,通过采用新型的振动传感器布置方式和数据处理公式,实现了利用普通振动传感器测量火箭飞行过程的角振动环境。应用此技术,在某型号飞行试验中成功获取惯组在主动段和再入段飞行的角振动环境,为考核惯组在多维振动环境下的动态导航精度提供了接近真实飞行状态的环境试验条件,避免了欠试验和过试验的风险,也为力学环境的精细化设计提供了宝贵的试验数据。
[1] 钟万登. 液浮惯性器件[M].北京:中国宇航出版社,1994.
[2] 王梦魁. 多维振动环境试验的实践[J].装备环境工程,2005,2(3):22-25.
[3] 吴家驹. 多维振动环境试验控制策略的分析基础[J].强度与环境,2008,35(4):1-6.
[4] 党建军,罗建军,万彦辉. 挠性捷联惯组振动环境下适应性及导航精度分析[J].弹箭与制导学报,2010,30(1):13-16.
[5] 尤太华,徐帆,郭康. 机抖式激光惯组高动态下导航误差分析[J].航天控制,2015,33(6):47-50.
[6] 吴斌,王海峰,曲涛,等. 弹载激光陀螺惯导系统安装支架设计[J].中国惯性技术学报,2007,15(2):132-135.
[7] 黄怀德.振动工程(上)[M].北京:中国宇航出版社,1995.
[8] 吴焕,赵润生,唐勇. 随机振动的描述及其试验与仿真[J].环境技术,2015(3):6-9.
[9] 黄寿康.流体动力·弹道·载荷·环境[M].北京:中国宇航出版社,1991.
[10] 刑天虎. 力学环境试验技术[M].西安:西北工业大学出版社,2003.