基于混合拓扑的机械无线传感器网络多信道数据传输方法
2018-03-05汤宝平
曾 超, 汤宝平, 邓 蕾, 肖 鑫
(重庆大学 机械传动国家重点实验室,重庆 400030)
无线传感器网络(Wireless Sensor Networks, WSNs)在许多领域有着广阔的应用前景[1-2],可弥补有线机械设备状态监测系统在某些应用中的局限性,如密封环境中轴承、齿轮等机械旋转构件的振动监测[3]。相较于结构健康监测等应用[4-5],机械振动监测中的无线传感器网络节点5~20 kHz的高采样频率及16~24位的高A/D转换精度将产生大量的振动数据。无线传感器网络节点较窄的信道带宽使得网络数据传输速率过低,在大量振动数据传输需求下实时性极差。目前,通用无线通信模块Nordic NrF905、TI CC2530等均支持动态调节通信载波频率,因此可采用多信道通信实现网络间并行数据传输以提高网络数据传输速率。
针对无线传感器网络多信道数据传输方法,国内外学者进行了大量研究[6-8], Guglielmo等[9]通过采用时隙调频方法(TSCH)提高了网络传输速率及通信可靠性。Wu等[10]提出一种基于树的多信道调度协议TMCP,并采用贪婪信道分配算法使得树间通信干扰最小化,该方法可提高网络吞吐量及降低丢包率。Chen等[11]通过构建均衡拓扑、信道分配和全网同步的TDMA机制实现了多信道数据收集协议MCC,该方法可将网络吞吐量提高33%~155%。以上方法虽然提高了网络数据传输速率,但是相较于结构健康监测应用中仅需不高于120 μs 的同步采集精度[12],机械振动监测需要5~20 kHz的采样频率,各采集节点间同步采集精度应小于5 μs才能满足正常监测要求,否则将直接影响信号采集的有效性和状态分析结果的好坏,如在试验模态分析中各个测点的振动数据获取时间差将导致严重的相位误差[13]。目前,在满足机械振动监测高同步精度要求的前提下实现多信道数据传输的方法未见相关报道,因此本文提出一种基于簇树星形混合拓扑的机械振动无线传感器网络多信道数据传输方法,以弥补现有高同步精度采集方法[14-15]传输速度过低的缺陷。该方法通过树间干扰最小化信道分配、树间通信握手机制、树间通信优先级抢占机制、树内通信能耗最小化时序调度来实现多信道数据传输。
1 簇树星形混合拓扑
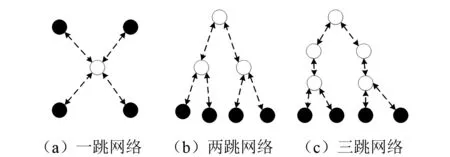
前期研究[14-15]表明基于跨层设计和信标时序补偿的多跳网络同步采集触发方法可将同步触发误差控制在1 μs以内,满足机械振动监测要求。但是,该方法为避免信标冲突,采用时分复用思想将各路由节点信标活动区间进行划分,导致各节点进行数据传输的有效时间段随着活动区的压缩而减小,使得信道带宽受限的机械振动无线传感器网络数据传输速率降至更低水平。机械振动监测较高的采样频率短时间内将产生大量原始数据,过低的网络数据传输速率将导致极差的时效性。为此,提出一种基于簇树星形混合拓扑的多信道传输方法。在采用前期研究中提出的基于跨层设计和信标时序补偿的多跳网络同步采集触发方法完成机械振动信号同步采集后,网关发出数据汇聚命令信标。各路由节点接收到汇聚命令后,首先继承信标内容并向下转发,随后以分配信道组建网络。各采集节点接收到汇聚命令后,以自身父路由节点信道加入网络,构建单跳星形网络,如图1所示。
基于IEEE 802.15.4协议的无线传感器网络支持星形、对等和树形三种拓扑结构。基于簇树星形混合拓扑的多信道传输方法可以有效结合树形拓扑和星形拓扑各自优势。一方面,利用树形拓扑层次结构鲜明的特点使网络路由算法得以简化;另一方面,在星形拓扑中,由底层基础TIMAC协议栈提供信标模式下的全网周期性同步,为物理上具有分散性的各节点提供基本的时间同步条件,方便对树内各节点进行传输调度。此外,由于各路由节点均采用不同信道建立网络,无需考虑如何避免信标冲突。因此,各星形网络中活动区可占满整个信标间隔,从而最大化各节点进行数据传输的有效时间,提高数据传输速率。
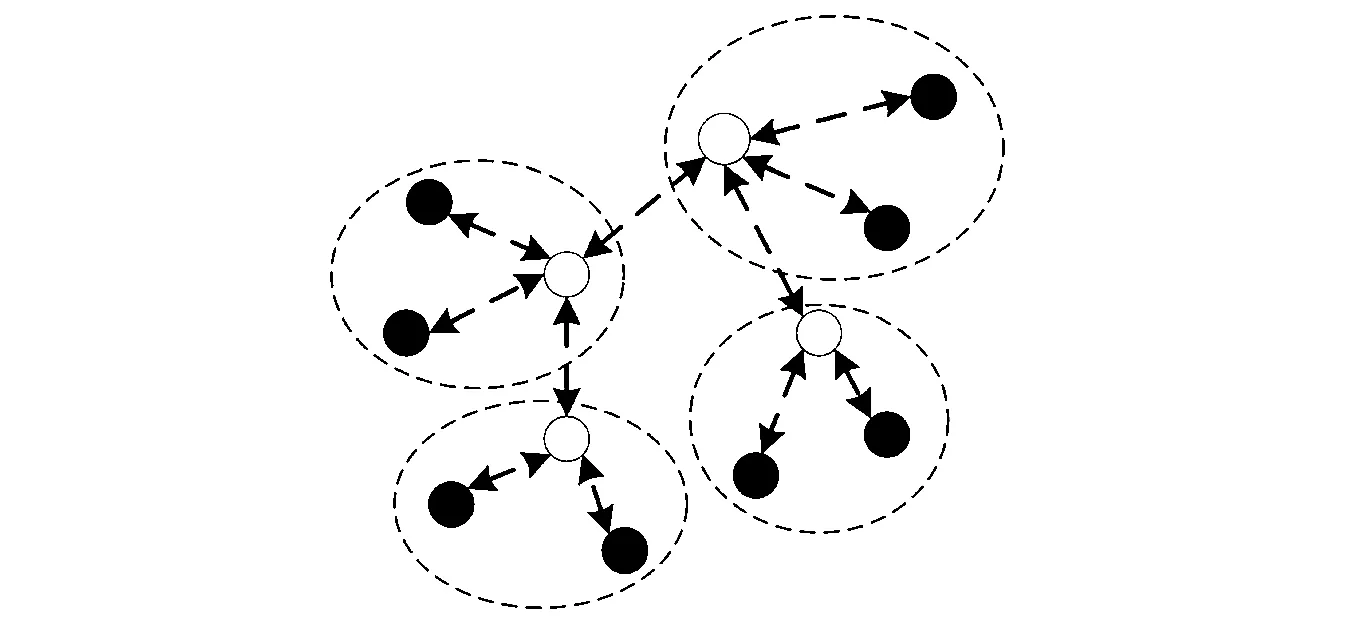
图1 簇树星形混合拓扑Fig.1 Tree-star hybrid topology
采用簇树星形混合拓扑虽然避免了信标冲突,但是带来了树间互盲的弊端,如图2所示。当路由节点D希望向路由节点C传输数据时,节点D将把信道切换至节点C信道。但是,节点C此时可能正向网关节点A传输数据,节点C、D不处于同一信道,导致节点D数据传输失败。如何解决树间互盲,将在第三章详述。
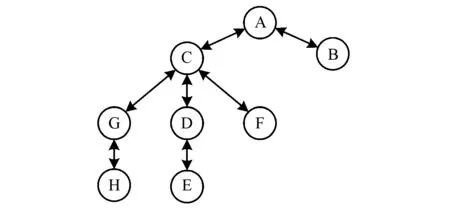
图2 树间互盲Fig.2 Network partitions problem
2 树间干扰最小化信道分配
2.1 信道分配方法
相对于面向桥梁、环境监测等大范围状态监测应用,机械状态监测应用要求的覆盖范围更小,三跳树形拓扑结构可满足大部分机械状态监测应用。为避免邻频干扰影响树间并行通信,使树间干扰最小化,需对各路由节点信道进行合理分配。为此,首先统计深度为i的路由节点数为si,由于IEEE 802.15.4协议最大仅支持16信道,故各si应满足以下条件:
(1)
如图3所示,当节点G正在向节点C发送数据时,由于节点C处于节点B、D、E、F的通信范围内,若此时节点B、D、E、F中任一节点以节点C的相邻信道同时进行数据发送,将导致邻频干扰。因此,为减少树间干扰,在进行信道分配时,应使任一路由节点的信道与所有同层路由节点及上层路由节点的信道相隔至少两个信道。假设各路由节点分配信道为Vij,i为节点所处深度,j为节点号,各节点信道应满足以下条件:
(2)

图3 邻频干扰Fig.3 Adjacent channel interference
定理1:可解得满足式(1)、(2)的各路由节点分配信道集合K的前提为:相邻深度路由节点最大总数不大于8。
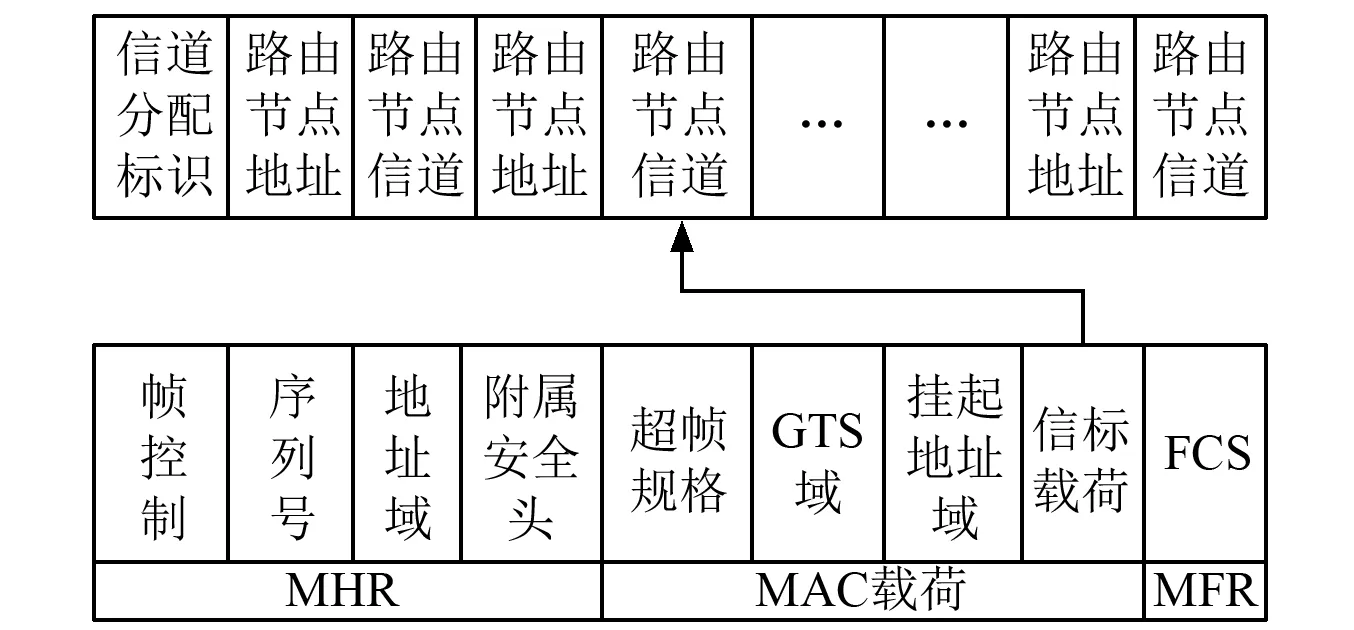
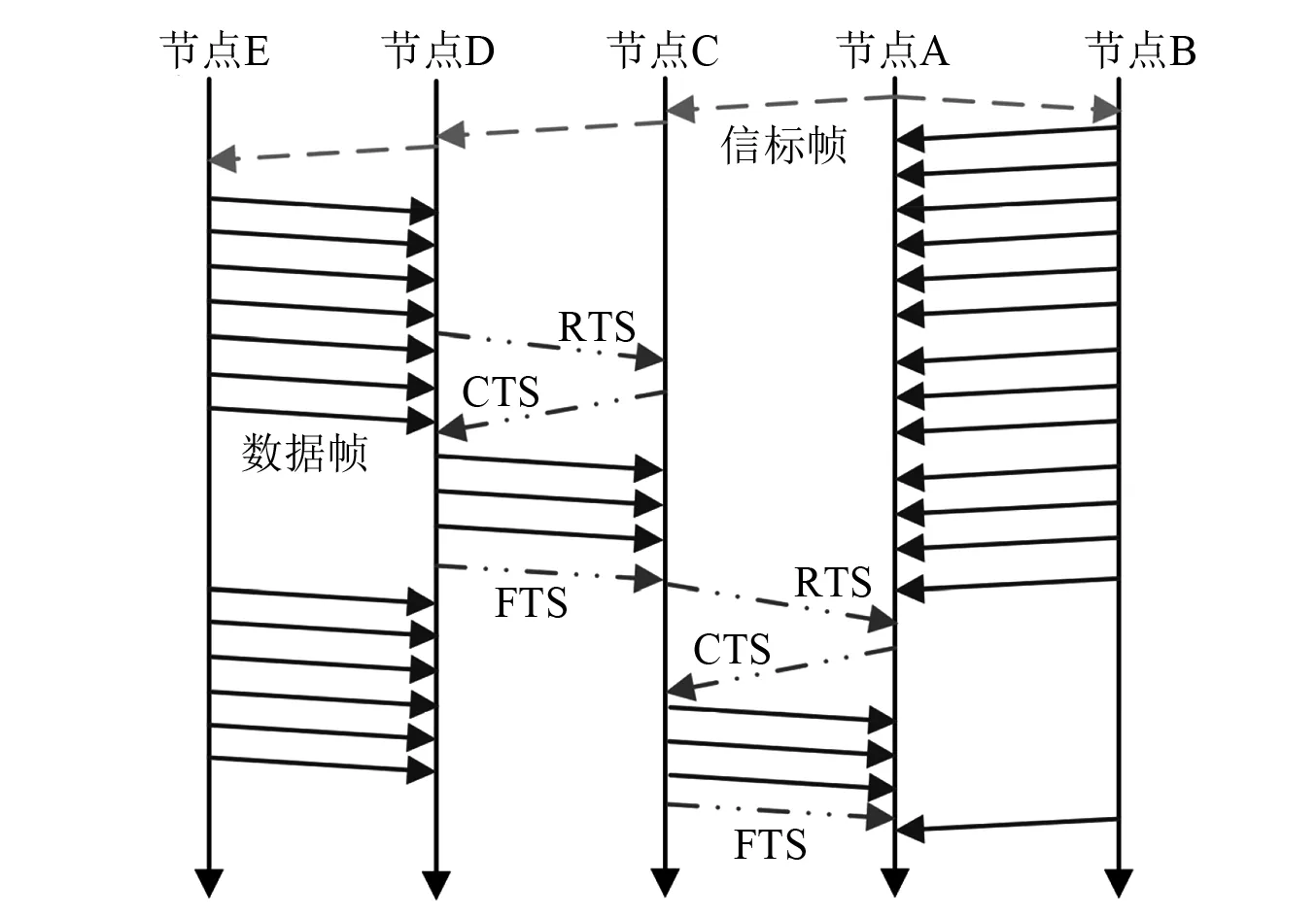
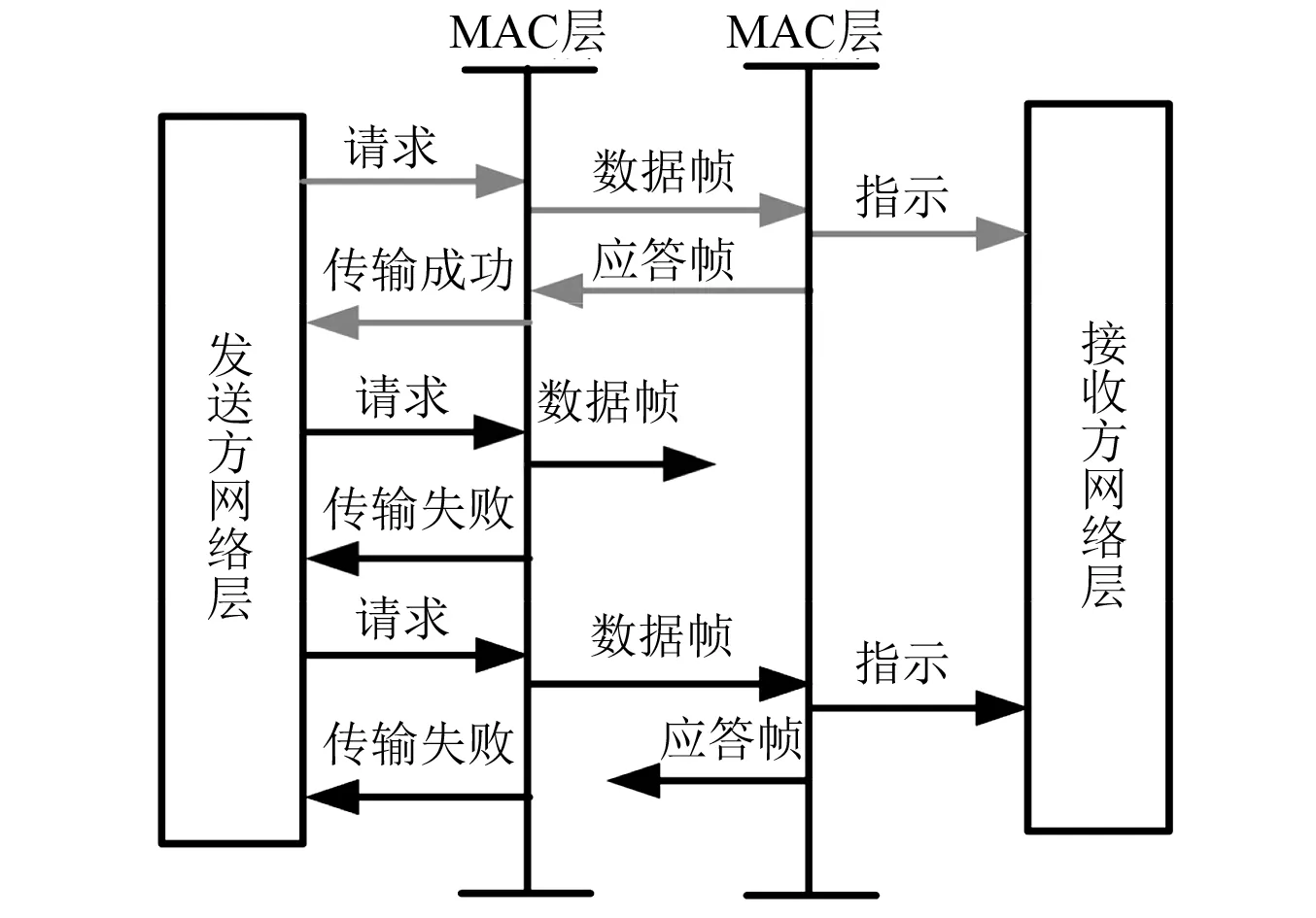
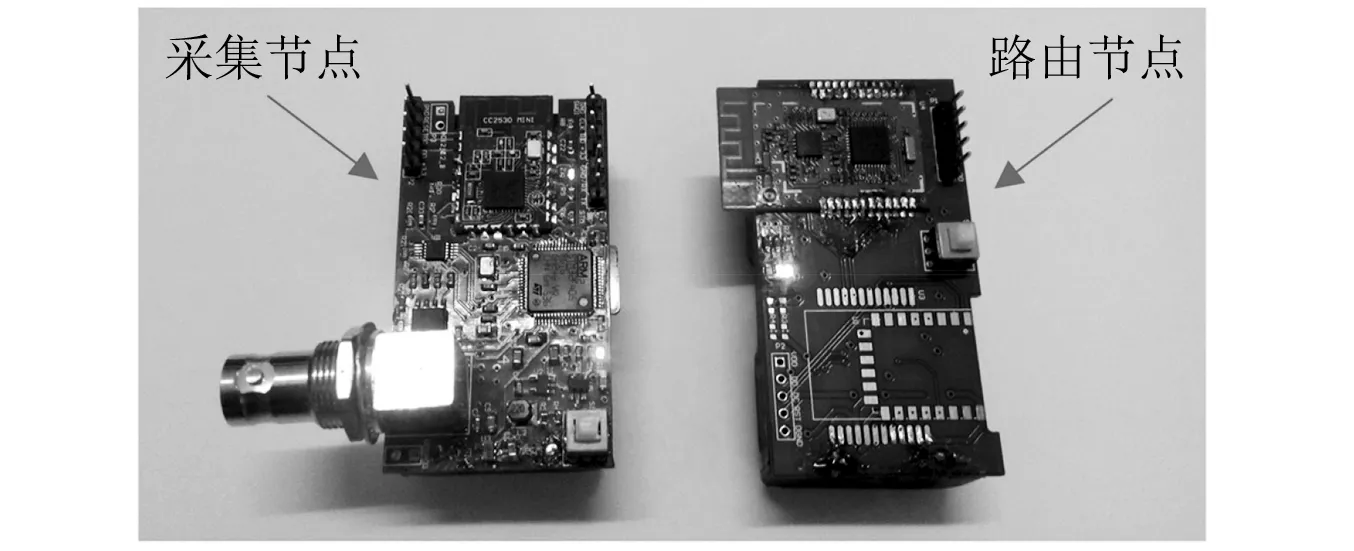
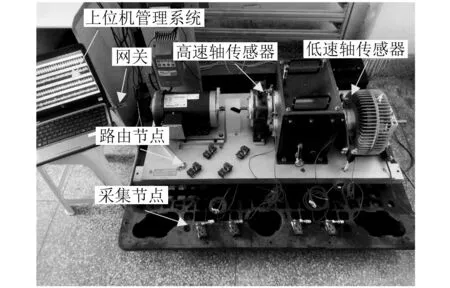
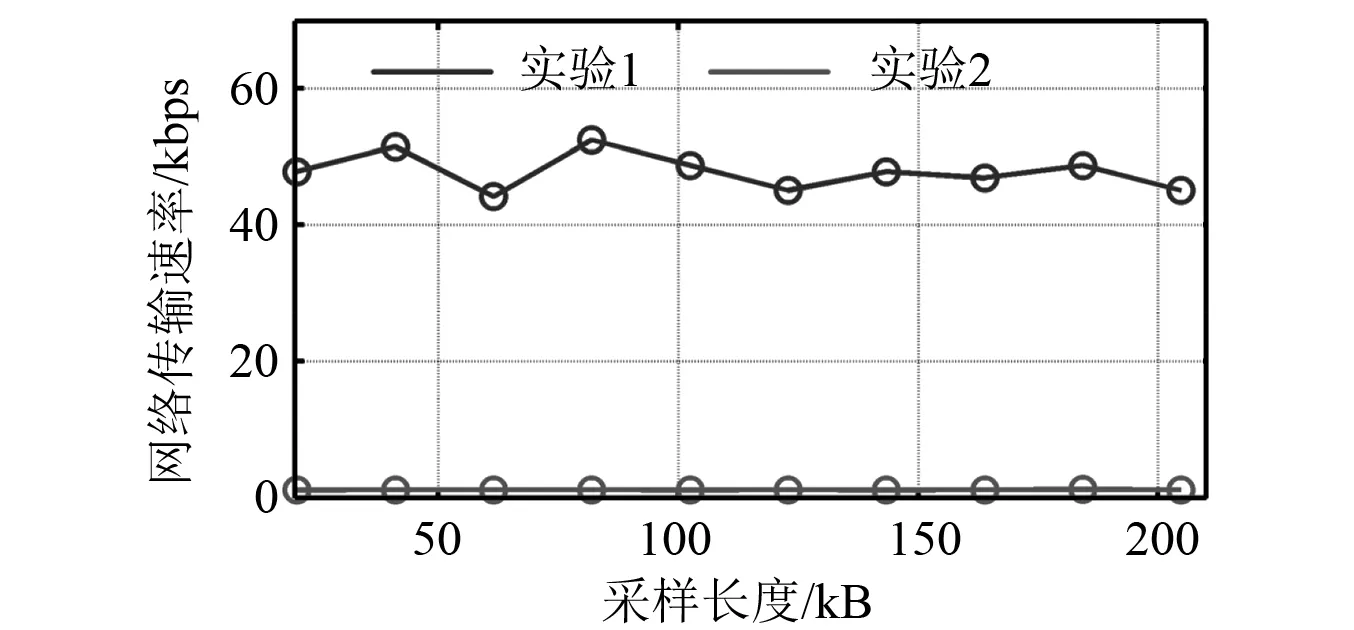
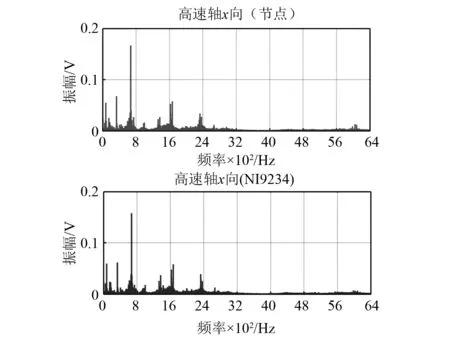
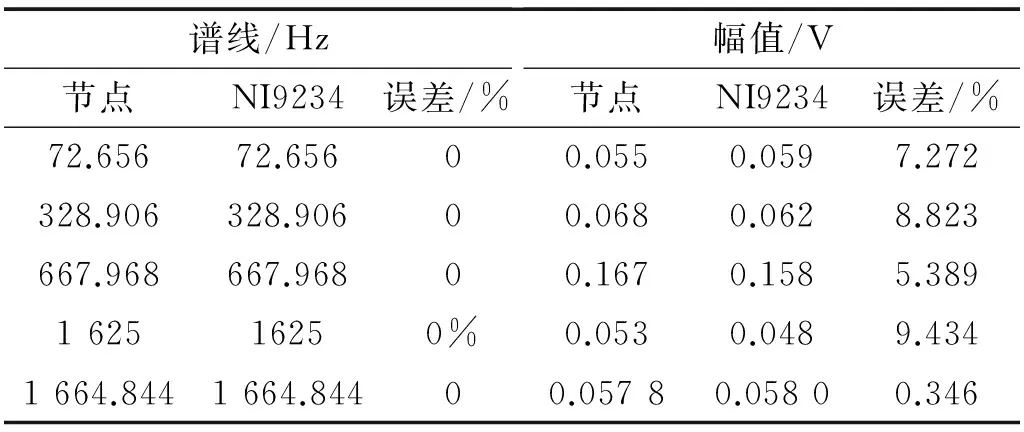
证明:假设整个拓扑结构中相邻深度路由节点的总数最大为t,且满足k1 以上各式相加可得,kt-k1≥2t-2。此外,由于各路由节点分配信道数值范围为1~16,故两个路由节点信道差值上界为15,因此t≤8,即相邻深度路由节点最大总数不大于8。 当相邻深度路由节点最大总数不大于8时,求解满足式(1)、(2)的各路由节点分配信道集合K,方法如下: 信道分配方法 输入:深度为i的路由节点数为si,i=1, 2, 3;偶数号信道集合Even:{2, 4, 6, 8, 10, 12, 14, 16};奇数号信道集合Odd: {1, 3, 5, 7, 9, 11, 13, 15}。 输出:记深度1与深度3中路由节点数较大者为m,较小者为n,各深度i路由节点分配信道集合为ki。 for 深度为m的路由节点 do km(u)=Even(p) ; u+,p++; untilu>sm; for 深度为2的路由节点do k2(v)=Even(p); v++,p++; untilv>s2; for 深度为n的路由节点 do kn(w)=Odd(j); w++,j++; untilw>sn 网关节点完成信道分配后,需将信道分配结果通知拓扑中其余各节点。信标帧作为MAC通用帧的一种特殊形式,其包含了信标级数、超帧级数等关键组网信息。此外,IEEE 802.15.4协议规定信标帧最大允许携带52字节的信标载荷。因此,可以通过将信道分配信息载入信标发送给子节点来实现低开销的信道分配信息广播机制。如图4所示,信道分配信标载荷由信道分配标识、路由节点地址和路由节点信道组成。该信标首先由网关节点发出,路由节点继承该信标内容并向下转发,各节点接收到该信标后,解析信标内容,提取与自身相关的路由节点信道。 图4 信道分配信标载荷格式Fig.4 The format of beacon payload for allocate channel 对于树间互盲,一种解决思路为实现全网的时间同步,需要进行数据通信的两个节点可在同一时间切换至同一信道。但是无线传感器网络作为分布式系统,由于物理上的分散性,为彼此间相互独立的各节点提供统一的全局时钟往往不易。而且现有的时间同步协议由于晶振漂移等因素导致的时间同步误差将使网络通信性能随着时间的增加而衰减[10]。为此,采用握手机制来实现树间通信。 如图2中拓扑结构,节点A首先广播数据汇聚命令信标帧,路由节点C、D接收到信标帧后,继承该信标内容并向下转发。各路由节点完成信标转发后,按各自分配信道组建簇树星形拓扑。各采集节点接收到信标帧后,以父节点分配信道扫描网络,入网成功后,进行数据帧发送。考虑到路由节点自身内存有限,无法缓存过多原始数据,当节点D接收数据帧达到一定量时,向上级路由节点C发出数据传输请求帧RTS。若路由节点C空闲,则向节点D回复允许数据传输帧CTS,节点D接收到CTS后,向节点C发送数据帧,直到自身所有缓存数据传输完毕,此时节点D将向节点C发送数据传输完毕帧FTS。节点C接收到FTS后,向父节点A发出RTS,后续过程同路由节点D,如图5所示。 图5 树间通信握手机制Fig.5 Handshake mechanism for inter-tree communication 在簇树星型混合拓扑中,路由节点某时刻可能正与父路由节点、子路由节点、子采集节点中任一节点进行通信,当另一子路由节点向该路由节点发出RTS时,由于资源受限的无线传感器网络中无线模块往往较为单一,无法支持同时发送与接收且无法同时与多个节点通信,若该路由节点直接回应CTS将导致数据传输失败。因此,为对无线模块进行合理调度,协调各节点间通信,采用通信优先级抢占机制。 如图2所示,当路由节点G向路由节点C发送数据传输请求帧RTS时,路由节点C可能:①与父路由节点A进行通信,若允许路由节点G进行数据传输,由于信道不一致将导致路由节点G严重丢包;②与子路由节点D进行通信,若路由节点G同时进行传输,由于CSMA-CA机制将导致节点高载波侦听能耗,因此对于以上两点,路由节点C都将只存储本次RTS握手信息,在传输完成后回应CTS;③与子采集节点F进行通信,若不允许路由节点G传输,将导致过多原始数据缓存于节点中,而节点存储容量往往有限,故此时将回应路由节点G允许数据传输帧CTS。此外,当路由节点A向路由节点C回应允许数据传输帧CTS时,路由节点C可能与子路由节点D进行通信,若路由节点C同时向路由节点A进行数据传输,由于无线模块不支持同时收发,将导致数据传输失败。因此,路由节点与其父路由节点和子路由节点具有相同的通信优先级,互相之间不允许抢占,而与其子采集节点间通信优先级最低,可被抢占。 IEEE 802.15.4协议采用载波侦听多路访问/冲突避免机制,若某路由节点下所有子采集节点同时进行数据传输,各节点将进行多次载波侦听,导致无谓的高能量开销。为此,利用TIMAC协议栈提供的信标模式下全网周期性同步的特点对树内各节点进行传输与休眠调度,最小化树内通信能耗。 如图6所示,在数据传输阶段,路由节点以信标间隔周期性广播信标帧,并将子采集节点短地址载入信标进行发送。当子采集节点接收到信标帧后,解析信标负载中有否带有自身短地址。若有,则进行数据传输;若没有,则进入休眠模式,休眠时间应略小于信标间隔,以便提前唤醒,为下一次接收信标帧做准备。当正在进行数据传输的子采集节点将自身所有数据传输完毕后,向父路由节点发送回应帧,表明数据传输完成,随后网关按关联顺序将下一子采集节点短地址载入信标,通知相应子采集节点进行数据传输,直到所有子采集节点完成数据传输。 图6 树内通信能耗最小化时序调度Fig.6 Time-scheduled inner-tree communication with minimizing power consumption 机械振动无线传感器网络恶劣的工作环境、复杂的电磁环境以及路由节点信道的频繁切换都将导致数据发生丢失。基于IEEE 802.15.4协议的无线传感器网络支持应答数据传输模式,如图7所示。当数据帧或应答帧丢失时,都将通知发送方网络层传输失败。对于树内通信,采集节点数据传输失败可能由于父路由节点接收到CTS后切换信道导致,此时采集节点应停止数据传输,由下一个信标负载内容决定是否恢复传输。对于树间通信,数据传输均由握手信息触发,因此当握手帧传输失败时,立即重传该帧以保证握手信息的可靠传输。当握手帧传输失败是由应答帧丢失引起时,重传该帧将导致接收方收到发送方的重复握手请求,为此在接收方进行帧序号的连续性检测,当帧序号相同时应予以剔除。 图7 应答数据传输模式Fig.7 Acknowledged data transmission mode 为验证本文所提基于簇树星形混合拓扑的机械振动无线传感器网络多信道数据传输方法性能,在无线传感器网络节点WSNG4上进行对比实验。WSNG4采集节点采用双核架构,由基于ARM Cortex M4内核的STM32F405微控制器和无线通信模块TI CC2530集成的增强型8051微处理器组成,节点支持IEPE传感器,可采用噪声较低的IEPE传感器采集机械振动信号。WSNG4路由节点由无线通信模块TI CC2530组成,并外扩容量为128Mbit的Flash芯片作为数据缓存区域,实物如图8所示。 图8 WSNG4节点实物图Fig.8 The WSNG4 prototype 将多个WSNG4节点与网关节点依次组建单跳、两跳、三跳网络,如图9所示。WSNG4采集节点分别采集动力传动故障诊断综合实验台(DDS)平行轴齿轮箱高速轴和低速轴两个相互垂直方向的机械振动信号,采样频率为12 800 Hz,采样长度从20.48 kB逐渐增加至204.8 kB,如图10所示。采集完毕后,实验1通过本文所提的多信道数据传输方法将原始数据传输至网关节点,同时通过串口上传至上位机管理系统,实验2则采用载波侦听多路访问/冲突避免机制(CSMA-CA)。 图9 对比实验网络拓扑Fig.9 The network topology of comparative experiment 图10 对比实验测试平台照片Fig.10 The photo of comparative experiment test platform 在不同深度的树形网络下,实验1、实验2的网络传输速率对比如图11所示。由于在一跳网络中不存在路由节点,无需将信标活动区间进行划分来避免信标冲突,因此各节点进行数据传输的有效时间不会被压缩。此外,实验2采用了CSMA-CA,在某节点进行数据传输时,其他节点会提前将数据帧准备完毕,因此在一跳网络中,实验1的网络传输速率将略低于实验2,如图11(a)所示。由图11(b)、11(c)可知,在多跳网络中,相较于实验2,实验1在采用多信道数据传输方法后,网络传输速率明显提高,可更加高效的传输大量原始振动数据,充分说明本文提出的基于簇树星形混合拓扑的机械振动无线传感器网络多信道数据传输方法的有效性。 (a)一跳网络 (b)两跳网络 (c)三跳网络图11 不同拓扑下,网络传输速率对比Fig.11 The comparative experiment of network transmission rate in different topology 此外,为了验证本文方法不会对数据精度产生影响,将多个WSNG4节点以图9所示拓扑组建三跳树形网络,4个采集节点分别采集动力传动故障诊断综合实验台(DDS)平行轴齿轮箱高速轴x,y向和低速轴x,y向机械振动信号,采样频率为12 800 Hz,采样长度为65 536 B。采集完毕后通过多信道传输方法将数据传回至上位机管理系统,与同样条件下采用NI9234有线采集卡采集的相应信号进行对比分析。图12为WSNG4节点与NI9234采集高速轴x向振动信号的时域、频域对比,FFT分析点数取32 768,表1为主要谱线对比。 (a)信号时域对比 (b)信号频域对比图12 节点采集与NI9234采集信号对比Fig.12 Comparison of signal between node acquisition and NI9234 从对比分析结果可以看出,节点与NI9234采集信号的主要频率成分一致,频率误差在频率分辨率以内(<0.390 625 Hz)。节点与NI9234采集的幅值误差较大,主要原因是节点和NI9234为不同采集系统,无法同时采集,而振动信号较为微弱,易受干扰而不稳定,非同步采集将导致分析误差。 表1 主要谱线频率和幅值误差对比 机械设备状态监测中最常采用的振动信号采集需要5~20 kHz的采样频率,采集数据量大,受制于机械振动无线传感器网络节点较窄的信道带宽,难以高效传输大量原始振动数据。为提高机械振动无线传感器网络传输速率,本文提出一种基于簇树星形混合拓扑的多信道传输方法。通过树间干扰最小化信道分配、树间通信握手机制、树间通信优先级抢占机制来解决邻频干扰、树间互盲问题,并采用树内通信能耗最小化时序调度方法降低网络整体能耗。对比实验结果表明,在多跳网络中,采用该方法进行数据传输,可有效提高网络传输速率,这对于提高信道带宽受限的机械振动无线传感器网络传输时效性具有重要意义。 [ 1 ] 曾贵伟, 汤宝平, 邓蕾,等. 机械振动无线传感器网络节点高精度数据采集方法[J]. 振动与冲击, 2016, 35(16):59-63. ZENG Guiwei, TANG Baoping, DENG Lei, et al. A high precision method for mechanical vibration data acquisition based on wireless sensor networks node [J]. Journal of Vibration and Shock, 2016, 35(16): 59-63. [ 2 ] 黄庆卿, 汤宝平, 邓蕾,等. 无线传感器网络子带能量自适应数据压缩方法[J]. 仪器仪表学报, 2014, 35(9): 1998-2003. HUANG Qingqing, TANG Baoping, DENG Lei, et al. Subband energy adaptive data compression method for wireless sensor networks[J]. Chinese Journal of Scientific Instrument, 2014, 35(9): 1998-2003. [ 3 ] 汤宝平, 黄庆卿, 邓蕾,等. 机械设备状态监测无线传感器网络研究进展[J]. 振动、测试与诊断, 2014, 34(1):1-7. TANG Baoping, HUANG Qingqin, DENG Lei, et al. Research progress and challenges of wireless sensor networks for machinery equipment condition monitoring[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(1): 1-7. [ 4 ] HEO G, JEON J. An artificial filter bank (AFB) for structural health monitoring of civil structures-Part2: An implementation and evaluation of the AFB[J]. Procedia Engineering, 2015, 114(2/3): 564-573. [ 5 ] FRASER M, ELGAMAL A, HE X, et al. Sensor network for structural health monitoring of a highway bridge[J]. American Society of Civil Engineers, 2014, 24(1): 11-24. [ 6 ] ZHOU G, HUANG C, YAN T, et al. MMSN: Multi-Frequency media access control for wireless sensor networks[C]∥ Infocom IEEE International Conference on Computer Communications. IEEE, 2006: 1-13. [ 7 ] INCEL O D. A survey on multi-channel communication in wireless sensor networks[J]. Computer Networks, 2011, 55(13): 3081-3099. [ 8 ] CHENG B, CI L, TIAN C, et al. A multi-channel MAC protocol with high throughput for wireless sensor networks[M]∥Advanced Technologies in Ad Hoc and Sensor Networks. Springer Berlin Heidelberg, 2014: 145-154. [ 9 ] GUGLIELMO D D, NAHAS B A, DUQUENNOY S, et al. Analysis and experimental evaluation of IEEE 802.15.4e TSCH CSMA-CA Algorithm[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 1573. [10] WU Y, LIU K S, STANKOVIC J A, et al. Efficient multichannel communications in wireless sensor networks[J]. Acm Transactions on Sensor Networks, 2016, 12(1): 3. [11] CHEN Y, GOMES P H, KRISHNAMACHARI B. Multi-channel data collection for throughput maximization in wireless sensor networks[C]. 2014, PA, USA: 443-451. [12] SAZONOV E, KRISHNAMURTHY V, SCHILLING R. Wireless intelligent sensor and actuator network-a scalable platform for time-synchronous applications of structural health monitoring[J]. Structural Health Monitoring, 2010, 9(5): 465-476. [13] BOCCA M, ERIKSSON L M, MAHMOOD A, et al. A synchronized wireless sensor network for experimental modal analysis in structural health monitoring[J]. Computer-Aided Civil and Infrastructure Engineering, 2011, 26: 483-499. [14] 黄庆卿, 汤宝平, 邓蕾,等. 机械振动无线传感器网络跨层同步采集方法[J]. 仪器仪表学报, 2014, 35(5): 1143-1148. HUANG Qingqing, TANG Baoping, DENG Lei, et al. Synchronous acquisition method based on cross-layer design for machine vibration wireless sensor networks[J]. Chinese Journal of Scientific Instrument, 2014, 35(5): 1143-1148. [15] 裴勇, 汤宝平, 邓蕾,等. 基于信标时序补偿的机械振动无线传感器网络同步触发方法[J]. 振动与冲击, 2014, 33(3): 57-62. PEI Yong, TANG Baoping, DENG Lei, et al. A WSN mechanical vibration synchronous acquisition trigger protocol based on beacon timing compensation[J]. Journal of Vibration and Shock, 2014, 33(3): 57-62.2.2 低开销的信道分配信息广播机制
3 数据汇聚
3.1 树间通信握手机制
3.2 树间通信优先级抢占机制
3.3 树内通信能耗最小化时序调度

3.4 数据传输可靠性
4 性能评估



5 结 论
