基于AT89S52单片机控制的运料机器人设计
2018-02-22张阳利
◎ 张阳利
(郑州铁路技师学院,河南 郑州 450041)
随着电子科技的发展,新的自动机器人产品不断生产,极大地提高了劳动生产效率,减轻了工人的劳动。在食品的工业化规模化生产中,会涉及大量的原材料,如果能实现原材料的自动运料,将大大缩短生产周期,解放更多的劳动力,降低生产成本。基于此目的,设计了一种智能式运料机器人,此机器人运用AT89S52单片机控制。本文将对运料机器人的任务设计、方案设计、模块设计、系统硬件设计以及软件设计5个阶段进行简要的分析介绍[1-2]。
1 设计任务
智能运料机器人是根据光电传感器检测周围环境,通过驱动、传动和导向执行元件配合,从而实现从启动小车→黑白寻迹→进入迷宫和避障→按规定路线行驶→运料→运动翻转作业→卸料的自动化。
2 总体方案设计
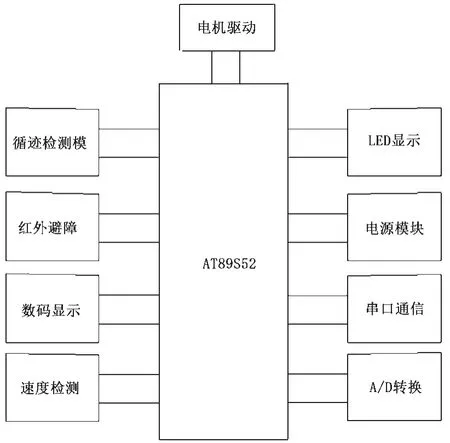
图1 总体设计方案功能图
采用AT89S52单片机作为控制单元,AT89S52是一种低功耗、高性能的微控制器,在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,可为众多嵌入式控制应用系统提供灵活、有效的解决方案。可对以下几个系统进行控制:寻迹避障系统、电机驱动、仪表显示、电源控制、速度控制和信号的转换等[3]。总体方案功能如图1所示。总体方案设计如图2所示。
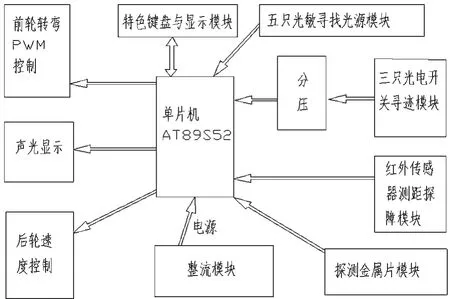
图2 总体方案设计图
3 模块设计
3.1 行走方案确定
小车的行走可以采用履带式小车、轮子式小车或支腿式小车。考虑设计原则和功能,采用轮子式小车为行走方案比较合理。既可以有很好的转向,其结构也相对简单。根据环境特点,需要采用3轮结构,一个万向轮做从动轮,其余两个并排的轮做驱动轮,以实现灵活转向。
3.2 电机的设计
电机可以采用直流电机,也可以采用同步交流电机。根据电源配置,选用普通直流电机较为合适,直流电机能实现直流电能和机械能互相转换,具备良好的调速性能,利于运料机器人的启动和制动[4]。
3.3 电机驱动方案的选择
电机驱动采用桥式电路。单片机很好控制晶体管的截止和导通,以选择接通电机电路,实现电机运转和停止。步进电机控制电路如图3所示。
3.4 供电电源方案的确定
供电电源可以采用两个电源,一路是给电机直接供电,另一路是给控制电路供电。也可以用一个电源,分为两路分别给电机和控制电路供电。为了减轻智能机器人的质量,本设计采用一个电源。
3.5 路面情况检测方案的确定
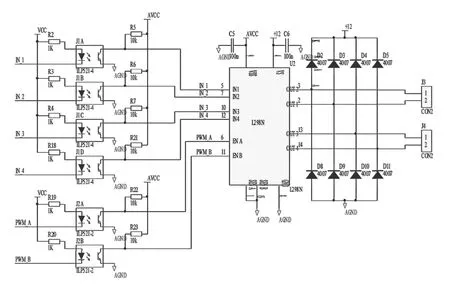
图3 L298电机控制电路图
路面的检测可以采用两种传感器。一种是声波传感器,采用雷达系统,实现声波信息的形成、传输、接收、变换、处理和应用。另一种是光电传感器,采用发光二极管做光源,光敏二极管接受信号。前一种会影响接受速度,也有自然光的干扰。因此本设计采用光电式传感器,发射和接收红外射线,这种传感器的优势在于反应灵敏且干扰小,电路简单[5]。
3.6 障碍物探测方案的设计
采用红外线发射接收装置。红外线发射装置是一种遥控设备,具有遥控功能,它通过红外线发射管在一定范围内向外发射光线,从而达到控制信号的作用。
3.7 运料作业机构方案的设计
采用偏心轮四杆机构。电机力矩较大,具有低转速、大扭矩、过载能力强、响应快、特性线性度好以及力矩波动小等特点,且易于控制。运料机构如图4和图5所示。
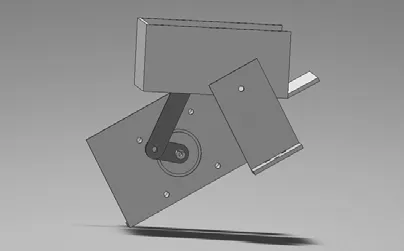
图4 四连杆翻斗机构图
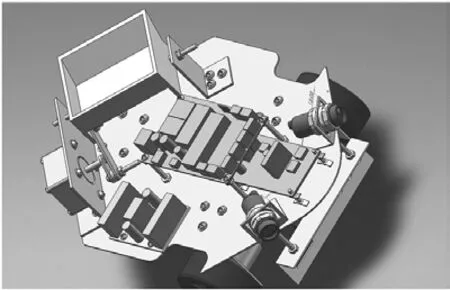
图5 运斗机构在小车上的布置图
4 系统硬件设计
4.1 路面黑线检测的设计与实现
4.1.1 黑白线探测
路面的检测通过光电传感器实现。黑白线传感器的有效检测距离为5~10 cm。具有自然光干扰小,信号处理简单的优点。另外可以增加调节距离的装置,提高测量精度。
4.1.2 黑白线循迹方案
在AT89S52单片机上连接P3.5和P2.0两个端口,并分别连接一个发光二极管。两个发光二极管布置在运料小车的底盘下端,左右各一个,呈一定角度分开。当发光二极管发出红外线后,照射到白线后会被反射回来,被光敏二极管接收到,输出一个低电平信号。同样当红外线照射到黑线后,由于光线被黑线吸收不能返回,接收管不能收到信号,于是输入一个高电平。经过AT89S52单片机的信息处理,使运料小车沿规定路线行驶。
4.2 电动机驱动电路设计与实现
电动机驱动电路采用集成电路芯片L298。
L298的控制:VS作为电源输入,VSS为控制电源信号输入,为+5 V电压,IN1-IN4四个引脚控制H桥的通断,采用标准TTL逻辑电平信号。集成电路采用塑料封装,SGB公司制造。表1为L298控制表。Multiwatt15如图6所示。
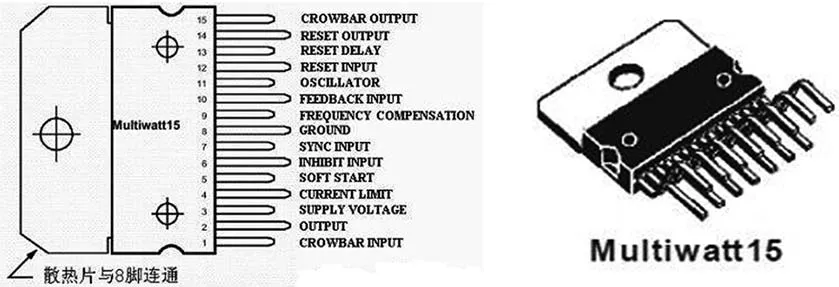
图6 Multiwatt15引脚图和封装图

表1 L298控制表
5 软件设计
迷宫避障设计的控制如图7所示,黑白寻迹控制如图8所示。
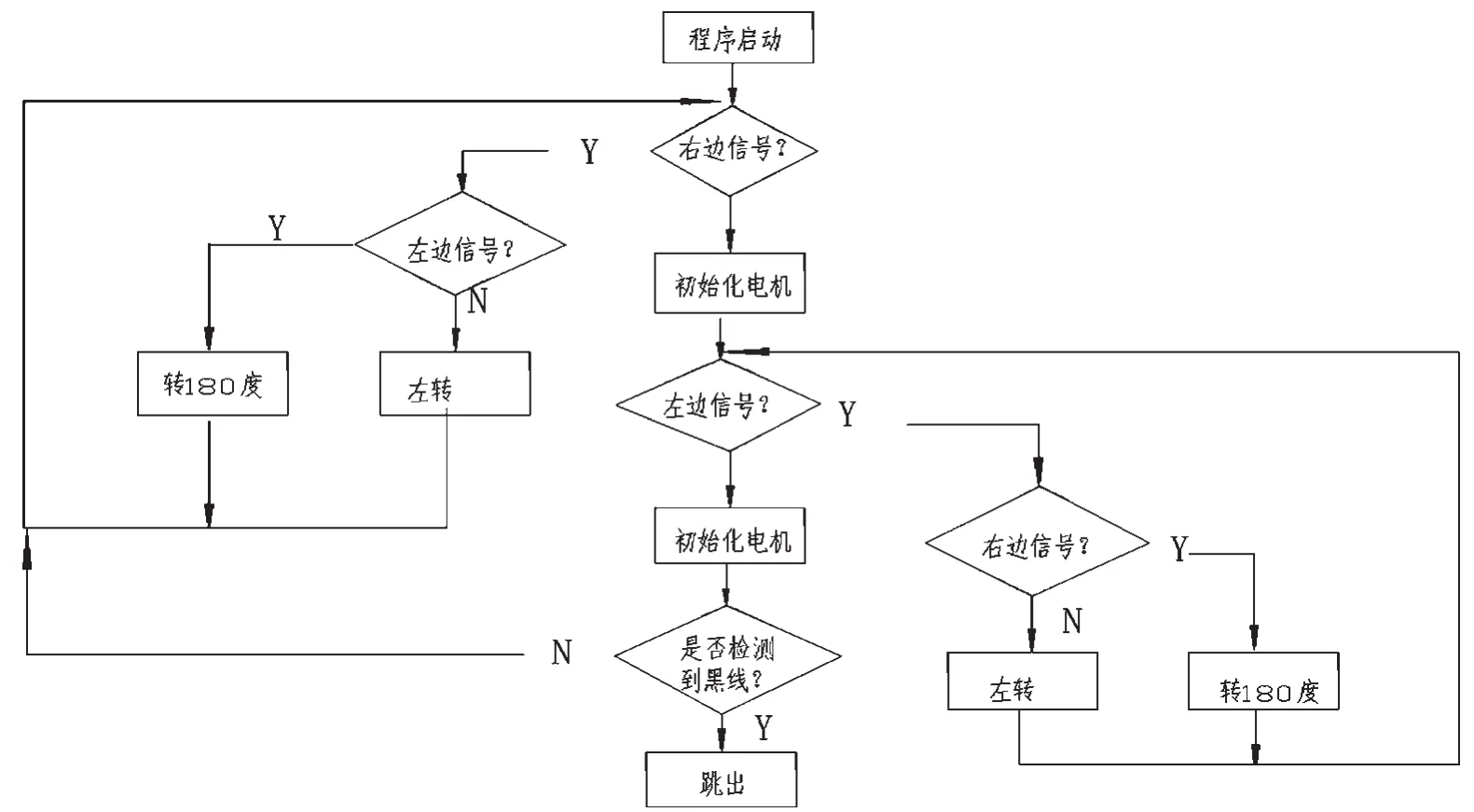
图7 迷宫避障流程图
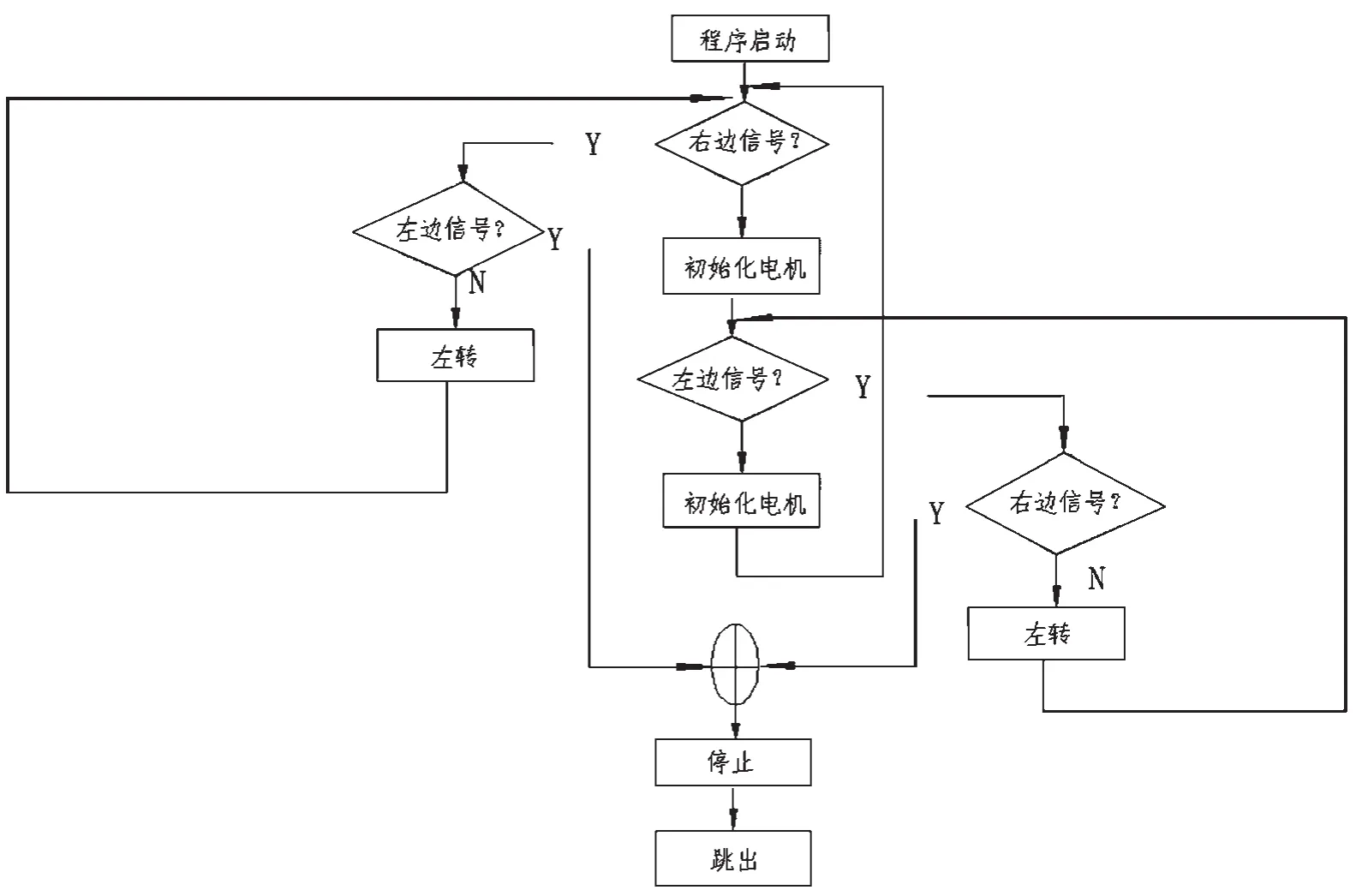
图8 黑白寻迹流程图
6 结语
按照设计思路,经过任务设计、方案设计、模块设计、系统硬件设计、软件设计以及购买零部件组装等一系列工序,完成了AT89S52单片机控制的智能式机器人的制作。对智能机器人的功能进行测试,均能正常运行,改变程序中的电阻值大小,可以改变小车运行速度,实现运料机器人在正确路线上的运输行驶和翻斗卸料作业。
当前使用机器人代替人力已成为生产趋势,相比人力,机器人能提高生产效率,运料机器人将在制造业的生产线中大显身手,高效、准确、灵活地完成物料的搬运。因为搬运机器人的并行作业、自动化、智能化和柔性化的特性能够很好地满足一般场合的搬运要求,相信以后会得到大范围推广。