菲律宾蛤仔采捕机振动松土装置设计与试验
2018-01-19母刚,段富海,张国琛,李秀辰,祝春柳,张倩
母 刚, 段 富 海, 张 国 琛, 李 秀 辰, 祝 春 柳, 张 倩
( 1.大连理工大学 机械工程学院, 辽宁 大连 116024;2.大连海洋大学 机械与动力工程学院, 辽宁 大连 116023 )
0 引 言
菲律宾蛤仔作为一种重要的海水养殖贝类,一般生活在潮间带中潮区至潮下带区域的海底,埋栖深度为3~15 cm.多年来我国一直是菲律宾蛤仔最主要的养殖生产国,2015年产量超过400×104t,占全球产量的98%[1].采捕是菲律宾蛤仔养殖生产的重要环节.传统采捕方法一般采取蛤耙、翻滩和挖捡等人工作业方式,存在劳动强度大、效率低、人力成本高、在较深水域无法作业等问题,制约了蛤仔大规模采捕.随着养殖生产规模的不断扩大,捕捞方式也由人工采捕过渡到机械化采捕.国内外常见的采捕设备以水力喷射式采捕为主[2-5],也有泵吸式采捕法[6],该类采捕方法主要采用高压水冲击海底,疏松海底土壤呈流态进行采捕,从而降低工作阻力.该方式激起的大量泥沙导致收获的贝类含沙量大、成活期缩短、海水透明度下降、捕后留下沟痕滞留时间长等问题,影响贝类生产的可持续发展[7-10].疏松和软化海底土壤作为蛤仔采捕的关键技术,可有效降低土壤硬度和采捕设备的牵引力[11].振动技术广泛应用于农业生产和建筑工程等领域的松土作业,利用机械、液压、电磁等方式激振,降低挖掘过程的阻力,提升工作效率.例如Shahgoli等[12]将不同频率和振幅的振动犁与固定犁进行了对比,振动挖掘可减少27%的功率;董向前等[13]采用低频振动松土铲对草原土壤进行疏松作业,牵引力减少了40%;张永华等[14]设计并虚拟试验了液压激振马铃薯挖掘装置,证明该装置可在4~10 Hz正常挖掘;付威等[15]利用研制的偏心连杆式萝卜收获振动装置进行松土试验,并确定了机器前进速度、激振频率和振幅等最佳参数组合;张士玺[16]利用土壤液化原理进行荸荠采收,对含水量较高的土壤进行激振流化,使原本固结的土壤变成流质状态,减小了采收阻力,降低了整机功率.
在加拿大和美国的西部沿海滩涂地区,养殖户利用机械振动式采捕机收获蛤类,速度是传统人工采捕的10倍,且成本降低70%,取得了良好的经济和生态效益[17-19],在意大利也有相关研究[20],但相关技术在国内尚未见报道.振动不仅可以疏松埋栖贝类的土壤,有利于采捕作业并降低牵引设备功率,而且振动波的传导还可以促使菲律宾蛤仔采捕时提前闭壳,从而减少沙土进入其内脏,降低产品含沙量.
本文为解决菲律宾蛤仔采捕时土壤软化疏松问题,降低设备的牵引力,设计和仿真优化采捕机前置振动装置,通过样机的试验研究,探讨振动频率、牵引速度和振幅对样机牵引力和土壤贯入力的影响,以期确定合理的技术参数,在蛤类采捕时疏松和软化土壤,降低设备的牵引力,进而为菲律宾蛤仔生态采捕整机的研发提供重要参考.
1 振动装置设计与仿真
1.1 结构设计
菲律宾蛤仔采捕振动装置的结构如图1所示,该装置可作为菲律宾蛤仔采捕设备的前置机构,辅助采捕作业.工作时由电动机6驱动与换向器5连接的偏心轮4进行一定频率的旋转,带动连杆3、摇杆2及耙齿1绕机架7做往复摆动,同时在拖曳装置的牵引和滑靴8的支撑下于海床上前进,进行菲律宾蛤仔养殖土壤疏松作业.整个装置外形尺寸为1 110 mm×640 mm×720 mm,根据蛤仔埋栖深度,耙齿入土深度150 mm,直径16 mm,齿间距115 mm.耙齿工作时由如图2所示的曲柄(偏心轮)摇杆机构带动振动,该机构曲柄长度(偏心距)为0~50 mm可调,机架、连杆、摇杆和耙齿的长度分别为595、350、500和417 mm,耙齿固定端距振动中心c(摇杆与机架铰接点)为150 mm.
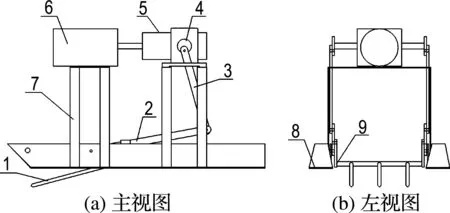
1 振动耙齿; 2 摇杆; 3 连杆; 4 偏心轮; 5 T形换向器; 6 电动机; 7 机架; 8 滑靴; 9 耙齿架
图1 蛤仔采捕机振动松土装置结构图
Fig.1 Structure diagram of oscillation device of scarification for clam dredger
1.2 振动耙齿运动学分析与轨迹仿真
应用多体动力学仿真软件ADAMS对振动机构及耙齿进行几何建模(图2),对曲柄长度e参数化,在各构件上施加相应的转动副、移动副和固定副等约束,并在曲柄和机架上分别加载旋转和平移运动.在耙齿顶端添加一个标记点(MARKER38),点运动可视为沿x轴负方向的水平移动和摇杆上的耙齿绕振动中心c的往复摆动的合成,因摆动振幅A相比振动半径R小且摆动角较小,可以将振动圆弧简化成斜置的往复直线摆动,再叠加水平直线移动构成一个倾斜的正弦振动[14].耙齿的运动轨迹可用坐标方程表示为
x=-v0t+v′xt=-v0t+Acosφsinωt
(1)
y=v′yt=-Asinφsinωt
(2)
将上式对时间求导可得速度方程:
vx=-v0+Aωcosφcosωt
(3)
vy=-Aωsinφcosωt
(4)
进一步求导得加速度方程:
ax=-Aω2cosφsinωt
(5)
ay=Aω2sinφsinωt
(6)
式中:x、y为水平和竖直位移,m;vx、vy为水平和竖直速度,m/s;ax、ay为水平和竖直加速度,m/s2;v0为装置水平牵引速度,m/s;v′x、v′y为无前进速度时水平和竖直速度,m/s;A为振幅,mm;φ为振动角,(°);ω为曲柄转动角速度,rad/s;t为时间,s.
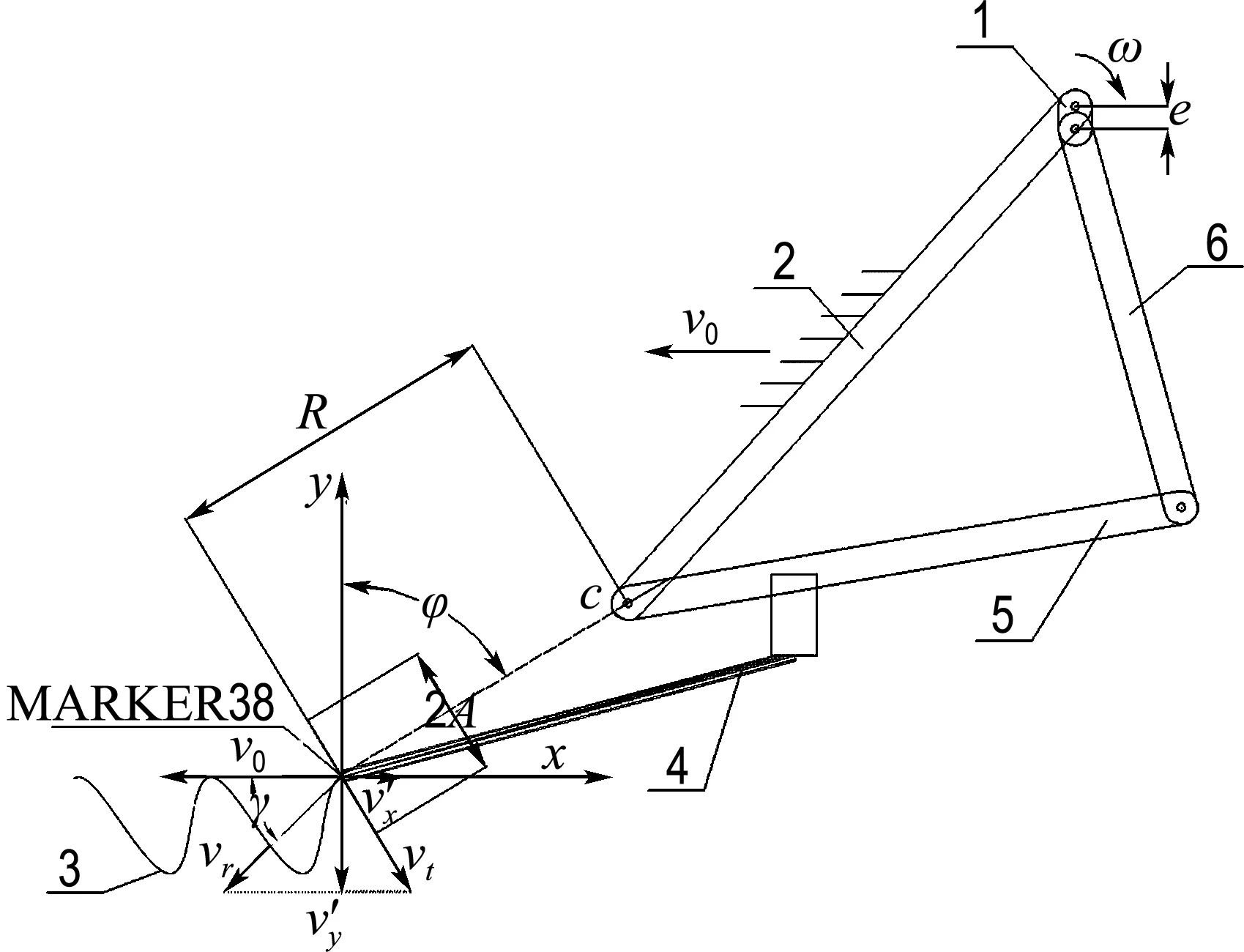
1 曲柄; 2 机架; 3 耙齿顶端点运动轨迹; 4 振动耙齿; 5 摇杆; 6 连杆
图2 振动耙齿运动分析
Fig.2 Motion analysis of oscillation tine
由式(1)和(2)可知,振动耙齿的轨迹与振幅A、曲柄角速度ω(曲柄转动频率f)、装置水平牵引速度v0以及振动角φ密切相关,可用式(3)中装置无牵引速度时的最大水平分速度vx(max)与装置牵引速度v0之比λ进行描述:
(7)
速度比λ是控制振动效果最重要的参数,当λ>1时可有效减小牵引力[12-13].通过调节曲柄转动频率f、牵引速度v0以及耙齿振幅A改变速度比,其中参数f可由变频器控制电动机实现,v0的调节取决于牵引设备,而A可通过改变曲柄长度e调节.为获得耙齿相应的振幅,常采用解析法或图解法求解e,但计算量相对较大.本设计利用ADAMS/View的参数化分析方法中试验设计工具(design of experiments,DOE),将曲柄长度e作为设计变量,以耙齿顶点MARKER38的振动幅值为研究对象进行仿真设计并不断缩小曲柄长度e的取值范围,直到确定振幅为5、10和15 mm所对应的曲柄长度(偏心距)分别为8.5、17.0和34.0 mm.
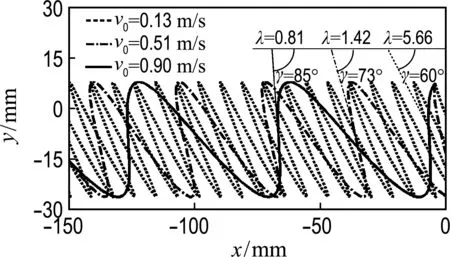
在不同条件下,选择5、10和15 Hz曲柄转动频率f,装置牵引速度v0根据实际工作牵引船速选取0.13 m/s(0.25 kn)、0.51 m/s(1 kn)和0.90 m/s(1.75 kn),取振幅A分别为5、10和15 mm[19,21],在ADAMS/View环境中仿真不同组合下耙齿顶点MARKER38的运动轨迹,同时创建一个测量函数f(t),测量耙齿MARKER38点振动时的合速度角,该角度可通过式(8)求出,并选取最小值γ.最后可通过ADAMS/Postprocessor模块绘制相应的x-y位移轨迹图(图3).
(8)
式中:vr为耙齿顶点MARKER38的合速度,mm/s;vx为耙齿顶点MARKER38的水平速度,mm/s.
如图3(a)所示,当牵引速度和振幅一定时,随着曲柄转动频率的增加,耙齿运动的速度比λ逐渐增加,同时最小速度角γ逐渐减小.当频率为10和15 Hz时,速度比λ>1且γ<90°,此时耙齿的运动轨迹在水平方向的投影有重叠部分,在一个振动周期内的土壤受到的扰动次数大于1,重复挖掘对土壤软化有积极影响.另外耙齿振动前行时有向后切削和压缩土壤的分力,同样装置会受到与牵引力方向一致的土壤前向反作用力,从而有利于减小牵引力.同样,当其他条件固定时,速度比λ随牵引速度加快而减小(图3(b)),随着振幅的增加而增大(图3(c)),当频率为15 Hz,牵引速度为0.13 m/s,振幅为15 mm时可获得比其他条件更大的速度比(λ=5.66)和更小的速度角(γ=60°),牵引力相对较小.Shahgoli等[12]的研究表明,虽然增加λ有利于降低牵引力,但整机消耗功率在速度比较大时却有所增加.为取得最佳的减阻及土壤软化效果,并确定相应的参数水平及速度比,进行了试验研究.
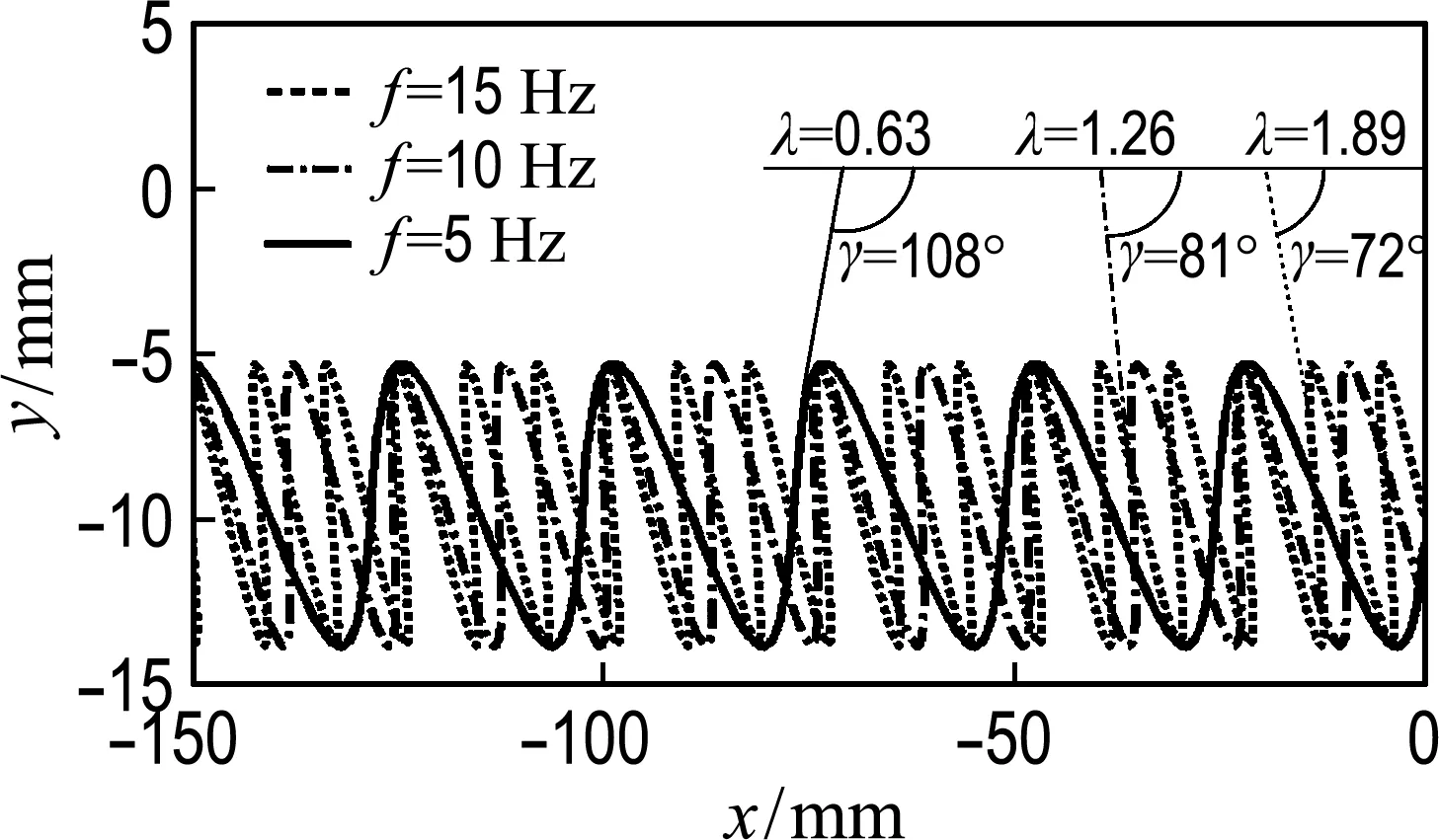
(a) v0=0.13 m/s, A=5 mm
(b)f=15 Hz,A=15 mm

(c)f=15 Hz,v0=0.13 m/s
图3 不同因素水平下耙齿的运动轨迹
Fig.3 Oscillation pathways of tine tip with different factors and levels
2 试验研究
2.1 材料、设备与方法
2.1.1 试验材料与设备 试验地点选取大连市一个菲律宾蛤仔养殖潮间带区域(39.02°N,121.48°E),土壤密度为(1.91±0.09)g/cm3,土壤质地为砂土类.作业前土壤贯入力为(57±12)N.试验设备包括经仿真优化设计的蛤仔采捕振动松土装置(质量m=130 kg)、X680型变频器、8 t 牵引设备、WG-N型土壤贯入力测定仪和DL-W1型无线数显拉力计.
2.1.2 试验方法 采用重复(n=3)单因素试验法和三因素三水平重复(n=2)正交试验法,检验各因素对土壤软化和样机牵引力的影响.正交试验的因素及水平如表1所示.土壤贯入力是反映土壤软化程度的一项重要指标[22],为研究装置对土壤的疏松软化效果,测定试验前后同一区域6个点位贯入深度为150 mm的土壤贯入力(N),作为土壤软化评价指标.振动减阻效果采用装置行进时的平均最大牵引力(kN)进行评价.数据处理采用Origin9.0和SPSS22软件,显著性水平设为95%(p<0.05),极显著性水平设为99%(p<0.01).

表1 正交试验因素水平表
2.2 单因素试验结果与分析
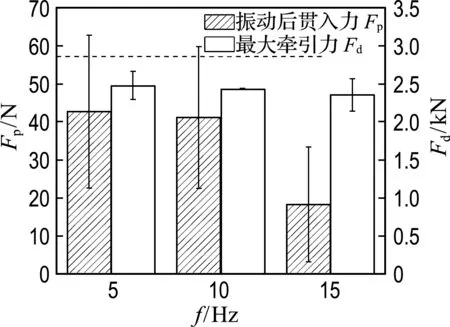
(1)振动频率对装置牵引力和土壤贯入力的影响
如图4(a)所示,在振幅为5 mm,牵引速度为0.13 m/s条件下,振动松土装置行进时最大牵引力随频率增加而持续下降.频率从5 Hz提高到10和15 Hz,最大牵引力分别下降了1.81%和4.84%,加快振动频率可提高速度比,从而减少牵引力,与之前的仿真结果以及董向前等[13]的研究结果一致.但在此试验条件下,牵引力下降的幅度有限,可能与该蛤仔养殖区域土壤砂性有关,粒径较大的砂土黏结性和塑性较小[23-24],经低频振动已受迫松散,进一步提高频率,减阻效果有限.
经各频率振动后,土壤贯入力下降明显,随着频率的升高,振动后的土壤贯入力呈下降趋势,但5和10 Hz频率振动后的土壤贯入力降幅相差较小,分别下降了24.86%和27.63%,而经15 Hz频率振动后的土壤贯入力下降了66.95%,较振动前软化效果显著.表明提高振动频率可以使单位体积的土壤受循环荷载次数增加,饱和土壤的动弹性模量将随着振动次数的增加有所降低,土壤应变软化[25].
(a) v0=0.13 m/s, A=5 mm
(b)f=15 Hz,A=15 mm
(c)f=15 Hz,v0=0.13 m/s
注:图中虚线为振动前土壤贯入力
图4 不同因素水平下振动对土壤贯入力和装置牵引力的影响
Fig.4 The effect of different factors and levels on penetration force of soil and draft force of device
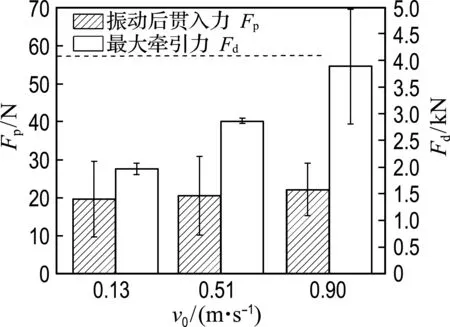
(2)牵引速度对装置牵引力和土壤贯入力的影响
当振动频率为15 Hz,振幅为15 mm时,牵引速度对土壤贯入力和装置牵引力的影响如图4(b) 所示.最大牵引力随着牵引速度的增加而明显增大,牵引速度为0.90 m/s的最大牵引力相比0.13 m/s时增加了近2倍,结果与李霞等[26]采用深松机松土时,牵引力随前进速度加快而增大的结论一致.牵引速度为0.13 m/s时,牵引力最小,该条件下装置的速度比(5.66)远大于其他两种牵引速度条件速度比(1.42和0.81),仿真结果与试验结果一致.
3种牵引速度条件下,与振动前相比,振动后土壤贯入力都明显下降,振动后土壤贯入力随牵引速度增加而略有增加.牵引速度为0.13 m/s时,振动前后土壤贯入力下降幅度最大,达到65.65%,牵引速度为0.51和0.90 m/s时,土壤贯入力分别下降了64.04%和61.26%.在试验中观察到,牵引速度越快,装置前端壅土现象越严重,表明过快的牵引速度不利于土壤的疏松和牵引力的减小.
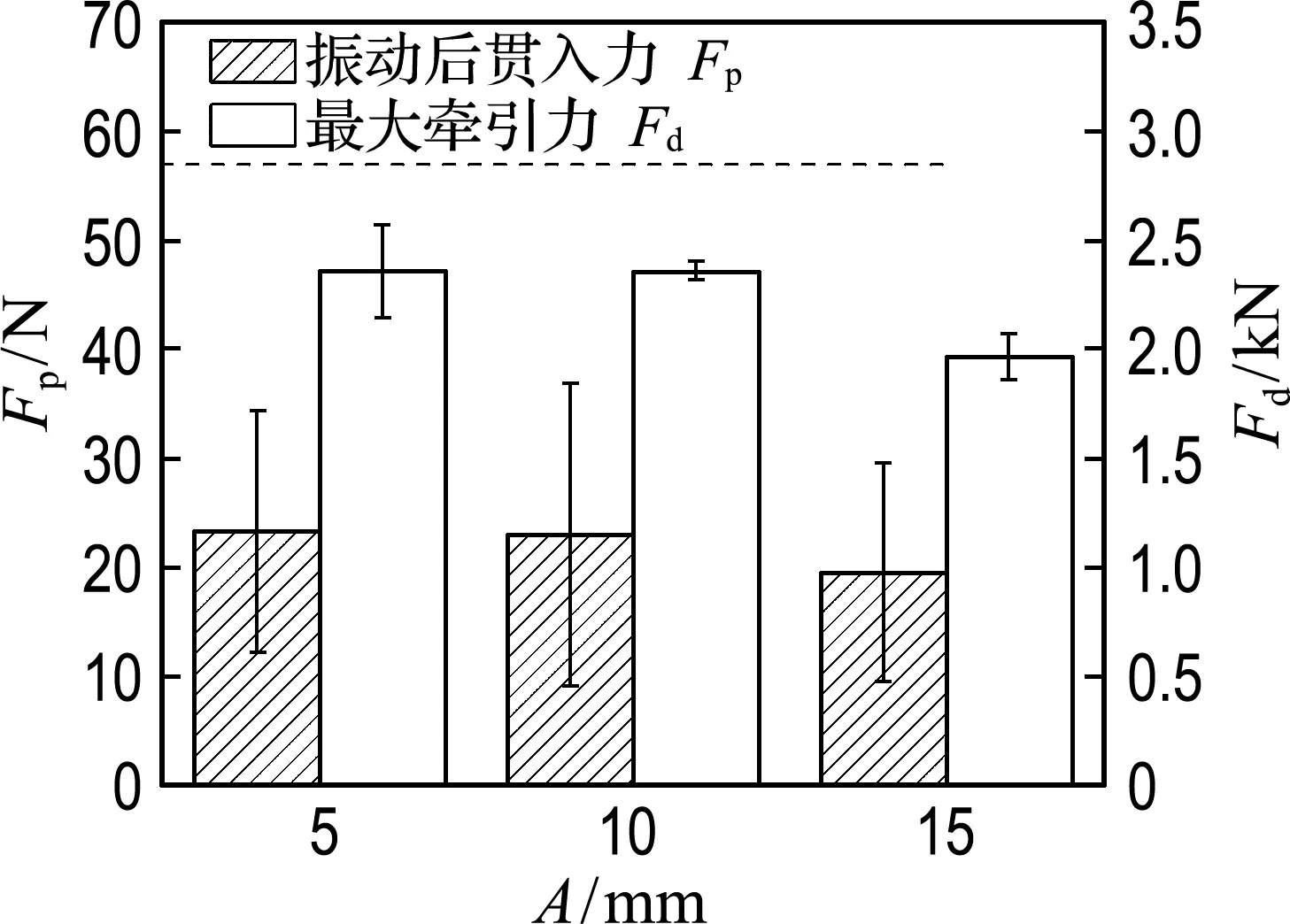
(3)振幅对装置牵引力和土壤贯入力的影响
由图4(c)可知,在频率15 Hz和牵引速度0.13 m/s条件下,振幅为5和10 mm时装置的最大牵引力变化不大,平均值均为2.36 kN,但10 mm振幅时牵引力较为稳定.当振幅增加到15 mm时,最大牵引力较前两种振幅下降了16.74%.在相同频率和牵引速度条件下,较大的振幅可获得较大的速度比,装置的牵引力减小,与仿真结果一致.
经振幅5、10和15 mm的扰动后土壤贯入力均明显降低,分别下降了59.07%、59.65%和65.65%.与振幅对牵引力的影响类似,经5和10 mm振幅振动后,土壤贯入力区别不大,平均值在23~24 N,当振幅进一步增大到15 mm时,土壤贯入力较前两种振幅下降了15%左右.表明振动挖掘可明显降低土壤的硬度,通过加大耙齿对土壤的往复切削幅度,降低土粒之间黏结强度,促使土壤软化疏松,有利于蛤仔的采捕.
2.3 正交试验结果与分析
正交试验设计及结果如表2所示,极差分析如表3所示,其中ki(i=1,2,3)为各因素在i水平时因变量的均值,由ki可见,牵引速度(C)与装置牵引力呈正相关性.根据极差R值的大小排列可知,影响装置牵引力主次因素为:牵引速度(C)>振幅(B)>曲柄转动频率(A).综合各因素的水平,当作业条件为牵引速度0.13 m/s(C1)、振幅15 mm(B3)和频率15 Hz(A3)时,该装置的牵引力最小.
表2 装置牵引力与土壤贯入力正交试验结果
Tab.2 Orthogonal experimental results of draft force of device and penetration force of soil

试验号A曲柄转动频率水平B振幅水平C牵引速度水平平均最大牵引力/kN振动后平均贯入力/N11112.4842.1721223.4515.1731332.7811.7542133.2321.4252212.6121.0862323.249.9273122.3025.5883233.7621.1793311.9719.58
装置牵引力与土壤贯入力方差分析如表4所示,在该试验条件下,3个因素中只有牵引速度(C)对牵引力影响显著(p<0.05),振幅对于牵引力的影响(p=0.094)大于频率对其的影响(p=0.491),与极差分析的结果一致.酒井憲司等[27]的试验结果也表明振幅比频率对牵引力的影响更大,而孙亚朋等[28]的研究结果则相反.这种差异不仅可能与土壤的自然特性和作业条件如土壤类型、固有频率、容积密度、含水率和作业深度等有关[29],也与不同因素组合条件下的速度比有关[30].
土壤贯入力的极差分析结果(表3)表明:振幅(B)与土壤贯入力呈负相关性,且为影响土壤贯入力的主要因素.牵引速度(C)是次要影响因素,影响程度最小的是曲柄转动频率(A).振动后土壤贯入力最小的组合条件为振幅15 mm(B3)、牵引速度0.51 m/s(C2)和频率10 Hz(A2).通过方差分析结果(表4)可知,振幅和牵引速度对振动后土壤贯入力的影响极其显著(p<0.01),而频率的影响并不显著(p>0.05).综合考虑各因素的显著性、单因素试验结果并兼顾采捕作业效率,降低土壤贯入力和装置牵引力的最优作业条件为振幅15 mm、牵引速度0.51 m/s和曲柄转动频率15 Hz.

表3 装置牵引力与土壤贯入力极差分析
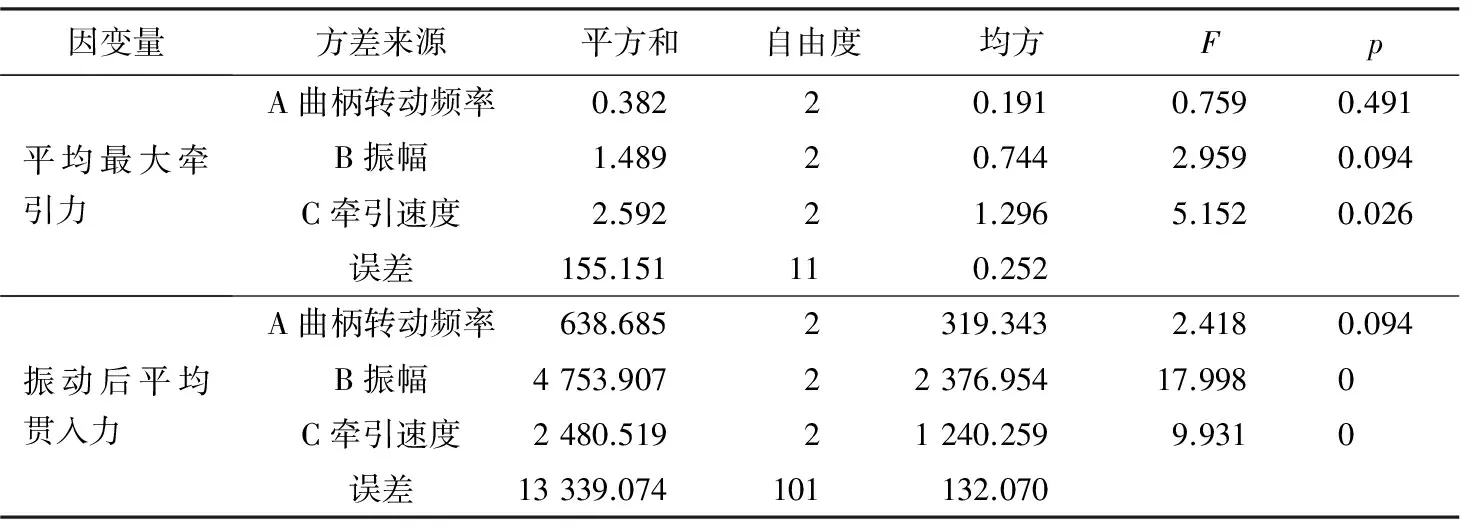
表4 装置牵引力与土壤贯入力方差分析
3 结 论
(1)设计了曲柄摇杆式菲律宾蛤仔采捕前置松土装置,对其工作耙齿进行了运动学分析,应用ADAMS软件对振动机构进行建模和计算,得出耙齿顶点的振幅为5、10和15 mm时对应偏心距为8.5、17.0和34.0 mm.在不同频率、牵引速度和振幅条件下仿真耙齿顶端运动轨迹并求解了速度比λ和最小速度角γ,当λ>1,γ<90°时,振动对减小牵引力有积极影响.
(2)样机的单因素试验结果表明,提高频率和振幅、降低牵引速度有利于软化蛤仔养殖土壤,降低装置牵引力,与仿真结果一致,但本试验条件下加快频率对降低装置牵引力的效果不明显.
(3)正交试验方差分析表明,牵引速度对土壤贯入力和装置牵引力影响显著,耙齿的振幅对土壤贯入力有极其显著的影响.综合考虑各因素,确定振幅15 mm、牵引速度0.51 m/s和曲柄转动频率15 Hz为菲律宾蛤仔养殖土壤软化和装置减阻的最佳条件,该条件下的仿真结果显示其速度比λ为1.42,最小速度角γ为73°,振动试验后土壤贯入力较之前下降了64.04%.
[1] FAO. Cultured aquatic species information programme.Ruditapesphilippinarum(Adams & Reeve, 1850) [EB/OL]. (2005-01-01) [2017-03-18]. http://www.fao.org/fishery/culturedspecies/Ruditapes_philippinarum/en.
[2] MEYER T L, COOPER R A, PECCI K J. The performance and environmental effects of a hydraulic clam dredge [J].MarineFisheriesReview, 1981,43(9):14-22.
[3] 范大岳. 关于研制缢蛏采捕机若干问题初探[J]. 渔业现代化, 1984(6):34-35.
FAN Dayue. Preliminary research on some issues of razor clam dredger [J].FisheryModernization, 1984(6):34-35. (in Chinese)
[4] 王林冲,高永胜. 文蛤取捕机的开发与研制[J]. 江苏农机化, 2006(6):25-26.
WANG Linchong, GAO Yongsheng. Research and development on the dredger of Meretrix lyrata clams [J].JiangsuAgriculturalMechanization, 2006(6):25-26. (in Chinese)
[5] 张同启. 贝类采捕机械的初步研究[J]. 渔业现代化, 1982(2):45-47.
ZHANG Tongqi. A preliminary study on shellfish dredging machinery [J].FisheryModernization, 1982(2):45-47. (in Chinese)
[6] 刘茂君. 贝类采捕机自吸装置的试验研究[J]. 渔业现代化, 1983(6):18-19.
LIU Maojun. Experimental study on self-suction device of shellfish dredger [J].FisheryModernization, 1983(6):18-19. (in Chinese)
[7] HAUTON C, HALL-SPENCER J M, MOORE P G. An experimental study of the ecological impacts of hydraulic bivalve dredging on maerl [J].ICESJournalofMarineScience, 2003,60(2):381-392.
[8] GILKINSON K D, FADER G B J, GORDON D C,etal. Immediate and longer-term impacts of hydraulic clam dredging on an offshore sandy seabed:effects on physical habitat and processes of recovery [J].ContinentalShelfResearch, 2003,23(14/15):1315-1336.
[9] GOLDBERG R, MERCALDO-ALLEN R, ROSE J M,etal. Effects of hydraulic shellfish dredging on the ecology of a cultivated clam bed [J].AquacultureEnvironmentInteractions, 2012,3(1):11-21.
[10] TUCK I D, BAILEY N, HARDING M,etal. The impact of water jet dredging for razor clams,Ensisspp., in a shallow sandy subtidal environment [J].JournalofSeaResearch, 2000,43(1):65-81.
[11] SMOLOWITZ R J, NULK V E. The design of an electrohydraulic dredge for clam surveys [J].MarineFisheriesReview, 1982,44(4):1-18.
[12] SHAHGOLI G, FIELKE J, DESBIOLLES J,etal. Optimising oscillation frequency in oscillatory tillage [J].Soil&TillageResearch, 2010,106(2):202-210.
[13] 董向前,宋建农,王继承,等. 草地振动松土机运动特性分析与振动频率优化[J]. 农业工程学报, 2012,28(12):44-49.
DONG Xiangqian, SONG Jiannong, WANG Jicheng,etal. Vibration frequency optimization and movement characteristics analysis of vibration shovel for meadow [J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2012,28(12):44-49. (in Chinese)
[14] 张永华,匡玉兰,陈 颖,等. 液压激振式马铃薯收获机挖掘装置的设计[J]. 西南农业学报, 2013,26(2):783-788.
ZHANG Yonghua, KUANG Yulan, CHEN Ying,etal. Design of hydraulic vibration potato harvester mining device [J].SouthwestChinaJournalofAgriculturalSciences, 2013,26(2):783-788. (in Chinese)
[15] 付 威,陈海涛,坎 杂. 萝卜收获机振动松土铲参数的优化[J]. 农业工程学报, 2011,27(11):46-50.
FU Wei, CHEN Haitao, KAN Za. Optimizing parameters on vibration breakshovel of radish harvester [J].TransactionsoftheCSAE, 2011,27(11):46-50. (in Chinese)
[16] 张士玺. 荸荠采收船挖掘机理及结构设计研究[D]. 西安:陕西科技大学, 2013.
ZHANG Shixi. Design and research of the mechanism and structure of mining of water chestnut harvesting boat [D]. Xi′an: Shaanxi University of Science and Technology, 2013. (in Chinese)
[17] STIRLING D. Mechanized clam harvesting for coastal British Columbia:an assessment of potential environmental implications [EB/OL]. (2013-03-01) [2017-11-24]. http://www. dfo-mpo. gc. ca/science/environmental-environnement/aquaculture/acrdp-pcrda/fsheet-ftechnique/pdf/18-eng. pdf.
[18] SAUREL C, FERREIRA J G, CHENEY D,etal. Ecosystem goods and services from Manila clam culture in Puget Sound:a modelling analysis [J].AquacultureEnvironmentInteractions, 2014,5(3):255-270.
[19] HOLT J K, CRESWELL R L. Vibratory shellfish harvesters and methods: US 5027533 [P]. 1991-07-02.
[20] RAMBALDI E, BIANCHINI M L, PRIORE G,etal. Preliminary appraisal of an innovative hydraulic dredge with vibrating and sorting bottom on clam beds (Chamelea gallina) [J].Hydrobiologia, 2001,465(1/2/3):169-173.
[21] 宋广军,张 雪,宋 伦,等. 鸭绿江口浅海海域菲律宾蛤仔养殖容量估算[J]. 水产科学, 2013,32(1):36-40.
SONG Guangjun, ZHANG Xue, SONG Lun,etal. Aquaculture carrying capacity of Manila clamRuditapesphilippenarumat shallow sea area in Yalu river estuary [J].FisheriesScience, 2013,32(1):36-40. (in Chinese)
[22] 任国强,刘镇业,李义德,等. 土壤比贯入阻力测试装置研究——基于Android手机WIFI控制[J]. 农机化研究, 2017,39(7):143-147, 174.
REN Guoqiang, LIU Zhenye, LI Yide,etal. Research on the WIFI control soil penetration resistance testing device-based on the Android mobile phone [J].JournalofAgriculturalMechanizationResearch, 2017,39(7):143-147,174. (in Chinese)
[23] 李 霞,张东兴,张 瑞,等. 土壤物理特性对深松阻力影响的试验[J]. 江苏大学学报(自然科学版), 2014,35(1):34-39.
LI Xia, ZHANG Dongxing, ZHANG Rui,etal. Experiment of subsoiling draught under different soil physical properties [J].JournalofJiangsuUniversity(NaturalScienceEdition), 2014,35(1):34-39. (in Chinese)
[24] 李汝莘,高焕文,苏元升. 土壤容重和含水量对耕作阻力的影响[J]. 农业工程学报, 1998,14(1):81-85.
LI Ruxin, GAO Huanwen, SU Yuansheng. Effect of soil bulk density and moisture content on the draft resistance [J].TransactionsoftheCSAE, 1998,14(1):81-85. (in Chinese).
[25] 郑 刚,霍海峰,雷华阳,等. 振动频率对饱和黏土动力特性的影响[J]. 天津大学学报(自然科学与工程技术版), 2013,46(1):38-43.
ZHENG Gang, HUO Haifeng, LEI Huayang,etal. Contrastive study on the dynamic characteristics of saturated clay in different vibration frequencies [J].JournalofTianjinUniversity(ScienceandTechnology), 2013,46(1):38-43. (in Chinese)
[26] 李 霞,张东兴,王维新,等. 受迫振动深松机性能参数优化与试验[J]. 农业工程学报, 2015,31(21):17-24.
LI Xia, ZHANG Dongxing, WANG Weixin,etal. Performance parameter optimization and experiment of forced-vibration subsoiler [J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2015,31(21):17-24. (in Chinese)
[27] 酒井憲司,寺尾日出男. 振動式サブソイラにおける土壌の振動切削に関する研究(第2報)けん引抵抗低減に対する振幅と振動数の影響度[J]. 農業機械学会誌, 1985-1986,47(1):43-49.
SAKAI K, TERAO H. The study on the vibratory soil cutting of vibrating subsoiler (Part 2) - The effects of amplitude and frequency on draft force reduction [J].JournalofJSAM, 1985-1986,47(1):43-49. (in Japanese)
[28] 孙亚朋,董向前,宋建农,等. 振动深松试验台作业参数减阻减振优化[J]. 农业工程学报, 2016,32(24):43-49.
SUN Yapeng, DONG Xiangqian, SONG Jiannong,etal. Parameter optimization of vibration subsoiler test bed for reducing resistance and vibration [J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2016,32(24):43-49. (in Chinese)
[29] 杭程光,黄玉祥,李 伟,等. 深松耕作阻力的影响因素分析与减阻策略[J]. 西北农林科技大学学报(自然科学版), 2016,44(11):202-208.
HANG Chengguang, HUANG Yuxiang, LI Wei,etal. Influencing factors and reduction strategies of subsoiling tillage resistance [J].JournalofNorthwestA&FUniversity(NaturalScienceEdition), 2016,44(11):202-208. (in Chinese)
[30] 文学洙,廉哲满. 振动式挖掘机的设计与试验[J]. 农业机械学报, 2006,37(10):77-82.
WEN Xuezhu, LIAN Zheman. Design and experimental study on vibrating digger [J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2006,37(10):77-82. (in Chinese)