模糊PI控制在EMT台架上的调速研究
2018-01-18杜常清赵文帅武冬梅
杜常清,赵文帅,武冬梅
(武汉理工大学 现代汽车零部件技术湖北省重点试验室,武汉 430070)
电驱动机械式自动变速器EMT,是依据混合动力系统的特点开发出的动力耦合系统,在变速器输入轴上将电机进行集成安装,取消了变速器中的同步器,利用电机实现主动调速,能实现缩短换挡时间并提升换挡品质[1]。EMT换挡过程分为5个阶段,即驱动力卸载、退挡、选挡和主动同步、进挡、驱动力恢复。经过系统的台架试验,在EMT执行换挡过程中,EMT电机转速主动同步所需的时间较长[2-3]。为此,进行了基于PI控制器的EMT电机速度环调速程序设计和调速试验。但在PI控制过程中,参数难以整定,为实现EMT电机的调速性能的优化,尽可能缩短调速时间,提供了能实现参数自整定的模糊PI控制器的设计方案,并通过试验验证方案的可行性[4]。本文通过软件实现模糊控制,在PLC调速程序中写入模糊PI控制子程序,包括转速数据读取、模糊化、在线查询模糊控制表及数据输出。即通过在线计算电机当前转速与目标转速的偏差e及偏差变化率ec,以此作为模糊PI控制子程序的输入量,由量化因子Ke和Kec将输入量模糊化,在PLC预定的存储器中在线查表获取模糊PI的控制参数。
1 EMT台架调速系统
1.1 测试台架总体结构
EMT测试台架由CAN总线系统、系统控制器、EMT系统、负载模拟系统、液压系统、冷却系统等组成[5],如图1所示。负载电机及其控制器用来模拟换挡环境,EMT系统包括液压换挡执行机构、齿轮系统及EMT电机。EMT换挡过程中,系统处于动力中断阶段。故在此不考虑负载模拟系统,仅使用EMT系统进行试验研究。

图1 EMT试验台架结构示意Fig.1 EMT test bench structure diagram
1.2 EMT电机选型
EMT电机是该动力耦合系统中极为关键的部件,其工作性能对EMT系统的换挡性能有很大影响,进而影响到整车的动力性及经济性。相对于直流电动机、交流异步电机,永磁电机具有体积小、质量轻的优点,便于在小型车上布置;对比开关磁阻电机,永磁电机的功率密度高且有较高的负荷效率[6]。因此,该台架选择永磁同步电机作为EMT电机,电机参数如表1所示。
1.3 模糊PI控制系统调速过程
系统控制器(PLC)从电机反馈的CAN报文中提取EMT电机当前转速,同时读入目标转速并计算偏差及偏差变化率,将计算结果进行模糊化,依此进行在线查询模糊控制规则表[7]。将相对应的PI整定参数传送至PI控制器,再由PLC将模糊PI控制器的运算结果以CAN报文的形式发送给电机,实现转速同步。模糊PI控制示意如图2所示。

表1 EMT电机参数Tab.1 EMT motor parameters

图2 模糊PI控制示意Fig.2 Schematic diagram of fuzzy PI control
2 模糊PI控制器的设计
模糊控制是闭环控制系统,需要实时监测被控制对象,并将进行模糊推理得到的结论使用在控制系统中。模糊控制的过程分为从被控量输入到模糊量的转换,即模糊化过程;建立模糊控制规则;模糊量到精确输出量的转换,即解模糊[8-9]。

图3 模糊PI控制查询表的生成Fig.3 Fuzzy PI control query table generation
2.1 模糊化过程
采用Mamdani模糊模型,使用模糊关系表来实现模糊规则,即用两维输入的可查询表格表示模糊规则库,利用前后的模糊语言变量进行在线查模糊关系表计算控制量[10]。文中涉及到的模糊控制器的结构是单变量二维模糊控制器,利用EMT电机当前转速与目标转速的偏差e和偏差变化率ec作为系统的输入变量,以ΔKe、ΔKi作为输出变量。
2.1.1 基本论域
设定EMT电机台架测试的最高目标转速为1424 r/min,允许误差为±2%,为便于系统计算,将目标转速与实时转速均除以1000。偏差e的论域为[-0.3,+0.3],偏差变化率 ec 的论域为[-2,+2],输出 ΔKp的论域范围为[-0.3,0.3],输出 ΔKi的论域范围为[-0.25,0.25]。综合考虑控制精度以及模糊PI控制器的计算效率,将输入变量划分为7个等级。输入模糊语言变量E和EC的描述为负大、负中、负小、零、正小、正中、正大,相对应的符号分别为 E={NB、NM、NS、ZO、PS、PM、PB},EC={NB、NM、NS、ZO、PS、PM、PB}。 输出控制量 ΔKp和 ΔKi对应语言变量划分为5个等级,描述为负大、负中、负小、零、正小、正中、正大;对应符号为{NB、NM、NS、ZO、PS、PM、PB}。将偏差e和偏差变化率ec量化为模糊论域{-3,-2,-1,0,+1,+2,+3}。 输出量 ΔKp和ΔKi量化为模糊论域{-3,-2,-1,0,+1,+2,+3}。
2.1.2 量化因子
在模糊化处理过程中,须将输入变量从基本论域经量化因子作用转换到对应的模糊集论域中[11]。偏差的量化因子Ke=n/xe=3/0.3=10,偏差变化率的量化因子Kec=m/xec=3/2=1.5。
在偏差较大的范围采用低分辨率隶属函数模型,即PB、NB采用S形隶属度函数;在偏差较小的范围使用高分辨率隶属函数的模型,即其他语言变量采用三角形隶属度函数[12]。

图4 偏差e和偏差变化率ec的隶属度函数Fig.4 Membership function of deviation and deviation rate

图5 ΔKp和ΔKi的隶属度函数Fig.5 Membership function of ΔKpand ΔKi
2.2 模糊控制规则及解模糊化
根据模糊控制相关理论及大量实际试验制定ΔKp和ΔKi的模糊控制规则,利用Matlab模糊工具箱进行分析。规则的核心为当偏差较大时,需要提高系统响应速度,取较大的比例系数Kp;中等偏差时,取较小的Kp和适当的Ki,降低系统超调量;偏差较小时,取较大的Kp和Ki,保证系统较高的稳定性。输出量ΔKp和ΔKi的模糊规则云图如图6、图7所示。在此,选取适用于隶属度函数对称的加权平均法解模糊[13-14]。

图6 输出ΔKp的规则云图Fig.6 Rule cloud chart of ΔKp

图7 输出ΔKi的规则云图Fig.7 Rule cloud chart of ΔKi
2.3 模糊控制规则查询表的生成
根据所设计的模糊控制器,利用Simlink建立测试模型,使用其中的System Test工具进行模型测试,得到离散化的输入与输出的关系数表,如图8、图9所示。

图8 ΔKp的三维模糊控制查询图表Fig.8 3D fuzzy control query chart of ΔKp

图9 ΔKi的三维模糊控制查询图表Fig.9 3D fuzzy control query chart of ΔKi
编写PLC程序,将测试得到的模糊PI查询数表写入数据块,由中断程序定义扫描周期,程序初始化时载入模糊控制数表。在PLC工作中周期性地计算偏差及偏差变化率,并进行模糊化、查询模糊控制表、解模糊化运算,返回所需要的PI控制参数。
3 台架试验
3.1 试验程序的编写
EMT电机调速试验分为程序初始化、实时转速读取及差值分析、在线查表、PI控制器、超速保护。程序初始化用于对程序运行中所用到的标志位、计数器的初始化,并定义程序运行周期,CAN报文的设置以及数据存储区的定义也在初始化时进行。实时转速读取及差值分析用于获取模糊PI控制器的输入偏差e及偏差变化率ec。通过获取的偏差e及偏差变化率ec进行模糊化运算,并依据运算得出的模糊语言变量进行在线查表,获得PI控制器的控制参数。超速保护模块用来防止因电机或程序故障而出现不可控的转速波动。

图10 EMT电机模糊PI调速程序流程Fig.10 Flow chart of EMT motor fuzzy PI speed regulation program
3.2 台架试验及数据采集
低压系统上电后,使用LabVIEW编写的上位机监控系统解析通过智能CAN接口卡传输的CAN报文,以此获得EMT电机的状态参数和高压供电系统状态参数。在进行试验之前,EMT置于空挡且充分预热,使用PLC的填表指令将离线计算的模糊PI查询表的数据以数据表的形式存放在堆栈式存储器中,并将采用STEP7编制好的PLC程序及组态下载至S7-200中。使用CANTest软件以10 ms为周期,以适当的时间间隔依次发送不同的目标转速报文,在每一个扫描周期内,PLC接收CAN报文后进行解析,提取目标转速与EMT电机实时转速并将二者进行比对计算。通过PLC程序的顺序扫描,计算得到转速偏差e及偏差变化率ec,模糊化后进行查询表模块操作,将偏差及偏差变化率对应的ΔKp和ΔKi解模糊化后传送给PI控制器,将PI控制器的运算结果进行CAN报文填写,进而输出给EMT电机控制器。
在台架试验过程中,上位机监控系统能够实时显示EMT电机转速与转矩曲线、电机动态参数,并实时记录保存试验数据,试验进行3次。试验结束后,利用Matlab进行数据整理,剔除稳定阶段的转速数据,重点展现电机控制器内置模块与模糊PI控制算法在调速阶段的差异,并根据试验数据绘制图形。
以试验台架换挡过程中一挡与二挡间挡位切换为例,在升至二挡的调速过程中,转速由1424 r/min降低至912 r/min,平均调速时间由155.6 ms减少到102.5 ms,试验结果如图11所示;在退至一挡的调速过程中,转速由646 r/min升高至1158 r/min,平均调速时间由166.3 ms减少到96.8 ms,有轻微超调现象但超调量不到1.5%,试验结果如图12所示。

图11 一挡升至二挡时,两种调速方式的对比Fig.11 Rose to the second gear,the two speed mode comparison
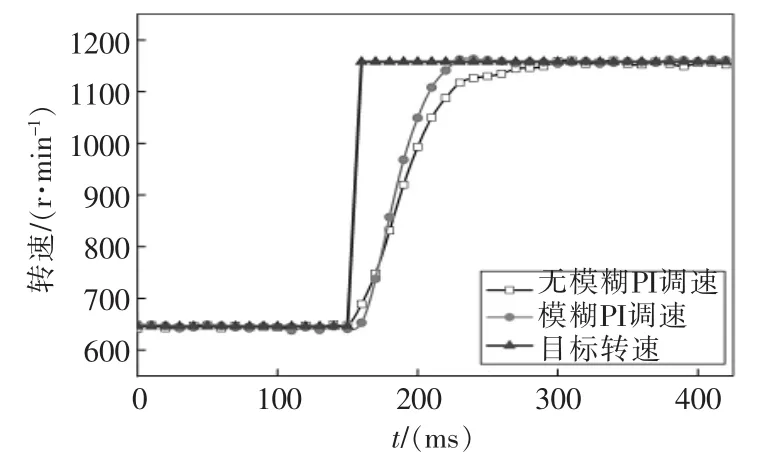
图12 二挡降至一挡时,两种调速方式的对比Fig.12 Down to the first gear,the two speed mode comparison
经计算分析,调速完成后的稳态偏差在±1.2%以内,满足EMT换挡对调速精度的要求。因此,所设计的模糊PI控制算法能使EMT电机调速性能得到较为明显的改善,EMT系统能在更短的时间内实现转速同步,换挡过程所耗费时间减少且因挡位切换引起的冲击较小。
4 结语
本文基于EMT测试试验台架,重点对传递转矩大,对调速精度要求高的低挡位进行试验。依次完成在线获取实时转速及电机运行参数;依靠Matlab中的模糊控制工具箱进行了隶属度函数的选取,模糊规则的制定以及模糊控制查询表的生成;以PLC为硬件载体进行了模糊控制与PI控制相结合的控制算法的程序化实现等工作。经过多次试验与修正,所设计的模糊PI控制调速程序能实现对EMT换挡中调速过程的优化,缩短转速同步时间,能更好地改善转速、转矩的接续性并减少换挡过程的冲击。
[1]曹正策.基于电驱动自动变速器(EMT)的Plug-in并联混合动力系统研究[D].武汉:武汉理工大学,2011.
[2]Breen J L,Bower G.Clutchless shifting of an automated manual transmission in a hybird powertrain[J].SAE Technical Paper,2011:6-12.
[3]Yoon Y S,Kim K S,Sun J K.Clutchless geared smart transmission[J].SAE Technical Paper,2011:7-15.
[4]李士勇.模糊控制[M].哈尔滨:哈尔滨工业出版社,2011.
[5]刘广通.电动汽车EMT自动变速器测试台架设计与试验研究[D].武汉:武汉理工大学,2017.
[6]曾令全,李书权.电机学[M].北京:机械工业出版社,2010.
[7]向虹霖.基于PLC的模糊控制应用研究[D].成都:西南石油大学,2010.
[8]王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.
[9]Jantzen,Jan.Foundations of Fuzzy Control[M].Wiley,2007.
[10]常晓恒.模糊自适应整定PID控制器的设计[D].阜新:辽宁工程技术大学,2003.
[11]刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社,2004.
[12]温嘉斌,麻宸伟.无刷直流电机模糊PI控制系统设计[J].电机与控制学报,2016,20(3):102-108.
[13]Karakaya A,Karakas E.Performance analysis of pm synchronous motors using fuzzy logic and self tuning fuzzy pi speed controls[J].Arabian Journal for Science and Engineering,2008,33(4):153-177.
[14]张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1889-1896.
