电子束莫尔条纹的智能提取及其特征参数分析
2018-01-17郭泉良龙井华白雁力廖昱博陈家堉付文勇刘进元
郭泉良,龙井华,白雁力,廖昱博,陈家堉,付文勇,刘进元
1)深圳大学光电工程学院,广东深圳 518060;2)深圳大学物理与能源学院,广东深圳 518060
莫尔条纹是两个具有空间频率的物体以恒定角度和频率方式发生干涉而产生的具有花样形式的现象[1-4].最常见的莫尔条纹是光学莫尔条纹,该现象在两光栅之间存在夹角或者光栅频率不一致时就可以产生,且通过光学莫尔条纹可实现莫尔定位与对准、地表形貌测量、以及面内外位移测量等应用.近年来,本课题组采用具有不同空间频率线对的光电阴极与固定空间频率的网栅,通过短磁聚焦分幅变像管观测到了电子束莫尔条纹现象[5],并对条纹进行提取和参数分析.由于电子束莫尔条纹的强度、角度、距离和线宽等参数可为分析短磁聚焦分幅变像管成像性能,探讨像管空间分辨性能的提升提供有效信息,因此,为解决前期研究中人工提取条纹和参数分析耗时过多的问题,提升条纹的提取及特征参数分析的效率,本研究采用数字图像处理的方法,实现莫尔条纹的智能提取及特征参数分析.首先,采用巴特沃斯低通滤波器和阈值选取算法对图像进行滤波和二值化处理,通过区域匹配实现对电子束莫尔条纹的提取;然后,对莫尔条纹的强度、角度、距离和线宽等特性参量进行分析;最后,采用Matlab软件设计可视化界面,实现莫尔条纹提取和参数分析的批量处理.
1 电子束莫尔条纹
通过短磁聚焦分幅变像管获得的电子图像如图1.其中,矩形边框上黑点的个数表示其两旁矩形区域内分划线的空间频率,黑点个数为1表示分划线的空间频率为5 lp/mm,黑点个数为2表示分划线的空间频率为10 lp/mm,依此类推.由图1可见,5 lp/mm区域仅能观测到栅板上的分划线,而无法分辨莫尔条纹;在10 lp/mm区域内能清楚地观测到莫尔条纹;在15 lp/mm区域内可模糊观测到莫尔条纹,但无法清晰分辨.因此,本研究仅讨论10 lp/mm区域内莫尔条纹信息.

图1 电子束莫尔条纹Fig.1 (Color online) Electron beam moiré fringe
2 电子束莫尔条纹提取
由于短磁聚焦分幅变像管采集的图像存在旋转,为准确提取图像中的莫尔条纹信息,首先,通过计算图像的旋转角,将图像旋转至水平;然后,通过区域选择法,定位和提取莫尔条纹信息.
2.1 图像旋转
在图像旋转过程中,首先,采用巴特沃斯低通滤波器和阈值选取算法对图像进行滤波和二值化处理;然后,计算图像的旋转角度;最后,采用Matlab中的imrotate函数将图像旋转至水平方向.
2.1.1 图像滤波和二值化
巴特沃斯低通滤波器函数为
(1)
其中,v(x,y)为像素坐标(x,y)处的频率;v0为截止频率;n为阶数.
在处理灰度图像时,若阶数n设定过大,容易出现振铃现象[9];若v0设定过低,图片中的有用信息也会被过滤掉;若v0过高,滤波效果不明显,无法达到预期的效果.因此在实际操作中,将n设定为2,v0设定为5,二值化阈值设置为灰度值199,在此情况下,获得边界图像如图2(a).
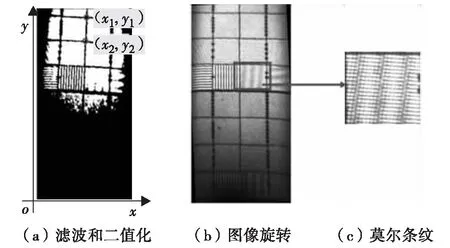
图2 莫尔条纹提取过程Fig.2 The extraction of moiré fringe
2.1.2 图像旋转角度计算
在图2(a)中建立x-y轴坐标系统,假设任意两条平行于x方向的直线与一条y方向边框的两个交点的坐标分别为(x1,y1)和(x2,y2), 那么y方向上的边框斜率k为
(2)
假设图像存在L条y方向边框,根据式(2)对每一条边框计算斜率k1、k2、k3、 …、kN, 然后根据式(3)计算图像的平均旋转角α, 最后采用Matlab的imrotate函数将图片旋转至水平方向,旋转效果如图2(b).

(3)
2.2 莫尔条纹定位及提取
采用式(1)的巴特沃斯滤波器和二值化方法处理图2(b),通过区域匹配的方法定位和提取含有莫尔条纹信息的区域,提取结果如图2(c)所示.
3 莫尔条纹特征参数分析
莫尔条纹的特征参数包括条纹角度β、 条纹间的距离l、 条纹线宽s和条纹强度等.采用式(1)的巴特沃斯低通滤波器和阈值算法处理,当v0=6,阈值设置为145时,滤波和二值化效果如图3.

图3 二值化莫尔条纹Fig.3 The binaryzation of moiré fringes
3.1 条纹角度
采用式(2)和式(3)计算条纹倾斜角度(β1、β2、β3、 …), 将所有条纹倾斜角度的平均值作为条纹的倾斜角度β.
3.2 条纹距离
在图3中选定平行四边形的4个顶点,然后根据式(4)至(6)计算条纹距离.其中,c1和c2为平行四边形两条底边对应的行数;Ω为平行四边形内的像素个数;μ为相邻黑白条纹间的半条纹数;η为条纹间的横向像素距离;β为条纹的倾斜角;ω为修正后的条纹间的横向像素距离;M为图片灰度矩阵的行数;N为图片灰度矩阵的列数;d为矩形区域宽度的测量值;l为条纹间距.当d=2 mm时,l= 0.658 mm.
(4)
ω=ηsinβ
(5)
(6)
3.3 条纹线宽
条纹线宽s的计算如式(7) .
(7)
其中,Ψ为平行四边形内的灰度值低于阈值的像素个数.当d=2 mm时,l=0.291 mm.
3.4 条纹强度曲线
条纹强度曲线是指沿垂直条纹方向的灰度值变化曲线.由条纹的倾斜角度β得到一系列平行于条纹、间隔为1个像素的直线簇,将这一系列直线的序号作为横坐标、每条直线上所有像素灰度值的平均值S(i)作为纵坐标画出的曲线为条纹强度曲线.在每行像素上,若某个像素在直线上,则将这个像素的灰度值S0(i,j)作为直线这个位置的灰度值S1(i,j); 如果直线在像素(i,j)和(i,j+1)之间,则以直线分别到这两个像素的距离为权值ρ和(1-ρ), 对这两个像素的灰度值取加权平均,将这个平均值作为直线这个位置的灰度值,计算方法为
S1(i,j)=ρS0(i,j)+(1-ρ)S0(i,j+1)
(8)
4 测试结果
图4采用Matlab软件设计的GUI界面.界面主要有“读取图片”、“提取条纹”和“参数分析”等功能,GUI界面内显示的图像有提取的莫尔条纹及其强度曲线,包含的参数主要有条纹角度、距离和线宽.测试过程中提取条纹的平均运行时间为~12 s,以图4中显示的莫尔条纹信息为例,通过本方法获得条纹倾斜角度为86.8°,条纹间距为0.66 mm,与人工操作的85.3°和0.64 mm分别存在1.75 %和3.13 %的差异,但提取和分析效率获得了明显的提升.
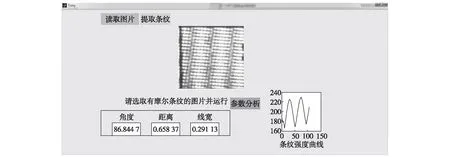
图4 GUI界面操作结果Fig.4 The results of GUI
结 语
本研究针对人工提取莫尔条纹繁琐的缺点,采用数字图像处理的方法,通过Matlab软件实现了电子束莫尔条纹智能提取及参数分析可视化操作.结果显示,莫尔条纹的提取准确率可达98%,平均提取时间为~12 s,其参数计算的误差均小于4%.该方法用于批处理操作,可提升海量数据中莫尔条纹的提取和参数分析效率,为进一步研究改善变像管空间分辨性能提供大量可信统计数据,具有重要理论和实践意义.
引文:郭泉良,龙井华,白雁力,等.电子束莫尔条纹的智能提取及其特征参数分析[J]. 深圳大学学报理工版,2018,35(1):35-38.
/
[1] HOLT D, WATSON J. A method for the positional measurement of a moiré fringe[J]. Strain,1966,2(1):17-18.
[2] LI Nianhua,WU Wei,CHOU S Y. Sub-20-nm alignment in nanoimprint lithography using moiré fringe[J]. Nano Letters,2006,6(11):2626-2629.
[3] WOO W H, RATNAM M M,YEN K S. Artificial neural network approach for moiré fringe center determination[J]. Journal of Electronic Imaging, 2015, 24(6): 063021.
[4] 何春娟,刘绒霞,曹 磊. 莫尔条纹技术在微小位移测量中的应用[J]. 西安工业学院学报,2005,25(6):565-567.
HE Chunjuan, LIU Rongxia, CAO Lei. Application of moire fringe technology in to measurement of micro replacement[J]. Journal of Xi’an Institute of Technology, 2005, 25(6): 565-567.(in Chinese)
[5] LIAO Yubo,LEI Yunfei,LIU Jinyaun,et al. Electron beam moiré fringes imaging by image converter tube with a magnetic lens[J]. Journal of Applied Physics, 2016, 119(21):35-38.
[6] YAO S N,COLLINS T,JANCOVIC P. Hybrid method for designing digital Butterworth filters[J]. Computers and Electrical Engineering,2012, 38(4): 811-818.
[7] ERER K S. Adaptive usage of the Butterworth digital filter[J]. Journal of Biomechanics, 2007, 40(13): 2934-2943.
[8] MELLO R G T,OLIVEIRA L F,NADAL J. Digital Butterworth filter for subtracting noise from low magnitude surface electromyogram[J]. Computer Methods and Programs in Biomedicine, 2007, 87(1):28-35.
[9] 周家玉,殷瑞祥. 一种自适应去除振铃滤波新算法[J]. 现代电子技术,2010,33(4):58-60.
ZHOU Jiayu,YIN Ruixiang. New adaptive deringing algorithm[J]. Modern Electronics Technique, 2010, 33(4): 58-60.(in Chinese)
[10] JIAO X,WU T. A visual consistent adaptive image thresholding method[J]. The Imaging Science Journal,2016,64(1):34-49.
[11] MOGHADDAM R F,CHERIET M. AdOtsu: An adaptive and parameterless generalization of Otsu’s method for document image binarization[J]. Pattern Recognition,2012, 45(6):2419-2431.
[12] BATAINEH B, ABDULLAH S N H S,OMAR K. An adaptive local binarization method for document images based on a novel thresholding method and dynamic windows[J]. Pattern Recognition Letters, 2011, 32(14): 1805-1813.
