吸尘器用直流无刷控制策略仿真研究
2018-01-12高素玲张庭亮
高素玲,张庭亮
(安阳工学院 电子信息与电气工程学院,河南 安阳 455000)
吸尘器又称真空吸尘器,在使用过程中,电流通过造成强烈的空气流动而在密闭的空间内产生负压[1],将灰尘、纸屑等吸入容器,使用方便、卫生。对电动机的要求是高转速、大转矩、小体积、轻质量、节能等[2]。直流无刷电动机较直流有刷电动机在结构上有了较大改变,其转子采用稀土永磁材料,以电子换向器实现换向,即用磁敏式霍尔元件替代传统的机械换向器和电刷,消除了由于电刷带来的缺陷。无刷直流电机应用范围广,有易于驱动、节能、速度可调、噪音小、结构紧凑、工作寿命长等优点[3],是吸尘器用电动机的首选。在大力推行节能减排的背景下,直流无刷电机的应用会更加宽泛。比如汽车行业,除可作为电动汽车的核心部件外,还可用在安全气囊、电动座椅、雨刮器等的驱动上;另外工业自动化行业中,直流无刷电机可满足数控机床、自动分拣设备、自动纺织、印刷等这些机械设备的髙效率、高精度的特殊要求;还有航空航天行业、家用电器行业等选用无刷电机作为驱动将成为发展的主要趋势[4]。
电机的小、轻、高效和磁性材料的发展相关。与电机相比,电子元器件更容易做到高电压、低电流,尤其是功率场效应晶体管。在高电压、低电流情况下, 场效应管上的管压降为总线电压的比例也小,可进一步提高系统的效率。专用的控制芯片、数字信号处理器及高速微处理器的出现,使运行速度和处理能力大大提高。并且更加保证了无刷直流电机的性能。
为满足各种特殊需求,各种类型的新型无刷直流电机相继出现,如无槽电机、定子铁心无齿槽等。电子技术、电子元件、新材料、新型电机的开发和先进控制理论的出现都进一步推动了无刷直流电机的发展和应用[5]。随着电力电子器件向大电流、高电压的方向发展以及正弦波PWM电流驱动技术、新的控制方式和控制策略的发展,决定了电机也向大功率、高性能的方向发展;随着电力电子技术高性能材料的发展、高性能微处理器的出现以及控制技术的发展,为直流无刷电动机不断发展改进提供了必要条件。直流无刷电动机是一种电机一体化产品,除了电机本体外,还必须带有位置传感器,以检测定、转子之间相对位置。而且,离开了驱动控制电路直流无刷电动机不可能运行。所以直流无刷电机的性能的提高也朝着智能、高效、节能、新材料、新技术等方向发展[6-7]。
基于DSP对吸尘器用无刷直流电动机进行控制仿真,研究直流无刷电动机的运行原理和控制方式,针对控制对象——永磁无刷直流电动机选择合适的控制方案。根据直流无刷电机的控制策略,实现转速闭环PI调节并通过判断按键来改变转速和PI参数值。
1 无刷直流电机的运行原理
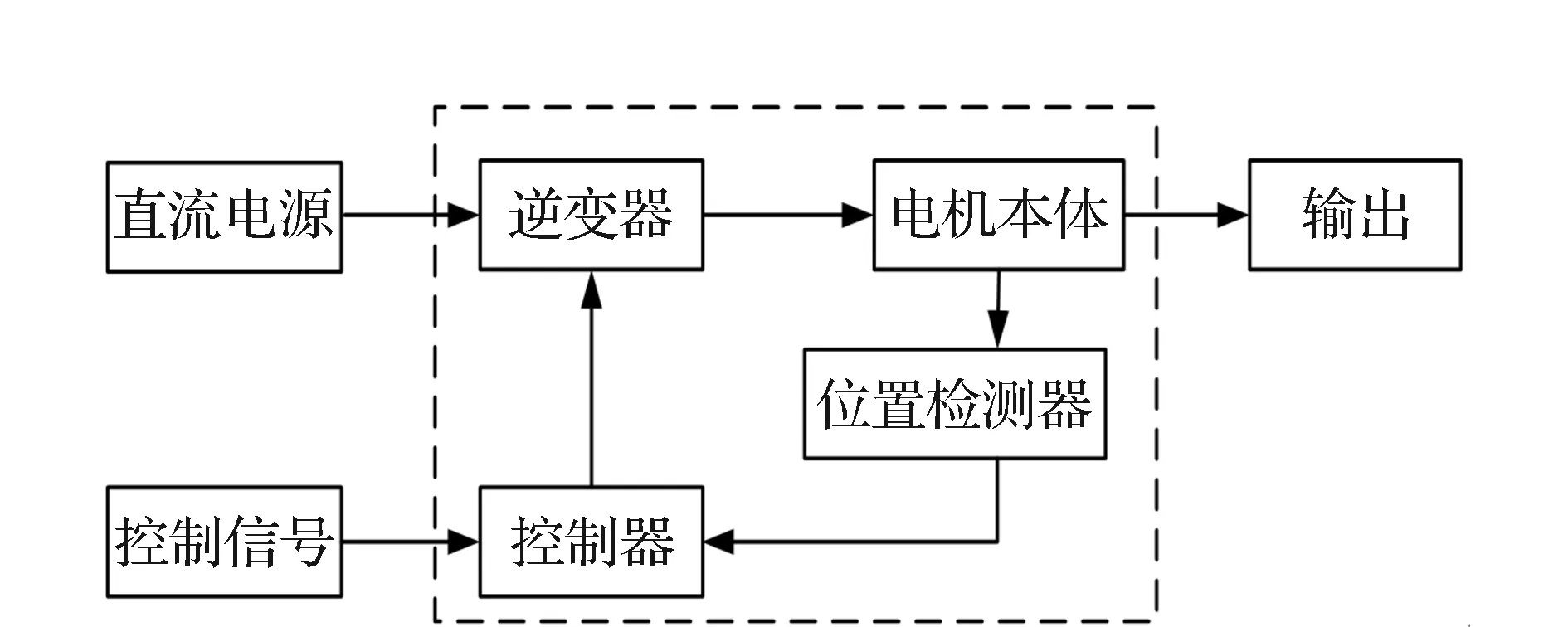
图1 直流无刷电动机的基本结构Fig.1 Basic structure of the brushless DC motor
直流无刷电机是典型的一体化电机,通过位置检测器检测转子位置,将信号送入控制器中,控制器发出逻辑信号控制逆变器中的开关管,是直流电压加载的电机本体电枢绕组上,使电机旋转。其结构见图1[8]。
以电机转子仅一对磁极为例,定子绕组Y型连接,按每相60°相带分布[9]。其结构原理图见图2。
假设电机三相绕组完全对称,定子电流、磁场分布对称,转子永磁体无阻尼作用;忽略齿槽效应、电枢反应对气隙磁场的影响;电机中磁滞、涡流损耗、控制电路的功耗等忽略不计;电动机气隙磁感应强度在空间为方波分布[10]。基于以上假设,得出定子三相绕组的电压状态方程为:
(1)
式中ua、ub、uc为定子绕组相电压;r为各项绕组电阻;ia、ib、ic为定子绕组相电流;L为各项绕组自感;M为每项绕组间的互感;ea、eb、ec为定子绕组反电动势。
因为三相绕组为Y型接法,所以式(1)可改写为:
(2)
则可得无刷直流电机的等效电路见图3。
定子绕组的电磁转矩方程为:
Te=Pn(eaia+ebib+ecic)/ω
(3)
由功率平衡,可得电磁功率方程成:
Pe=eaia+ebib+ecic=2EsIs
(4)
则电磁转矩方程又可表示为:
Te=PnPe/ω=2PnEsIs
(5)
机械运动方程为:
Te-T=Jdω/dt
(6)
式中Pn为电机极对数;ω为机械角速度;Pe为电磁功率;Es为反电动势幅值;Is为相电流幅值;T为负载转矩;J为系统转动惯量。
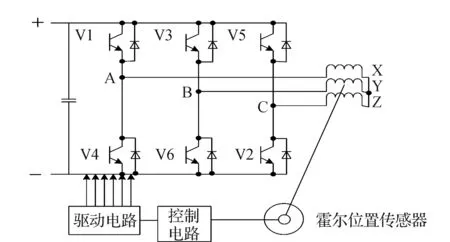
图2 无刷电机结构图Fig.2 Chart of brushless motor
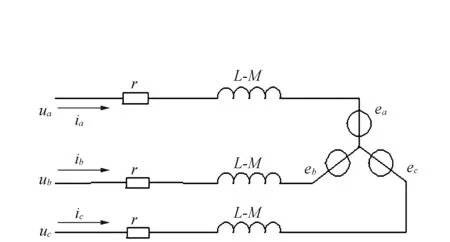
图3 直流无刷电机的等效电路图Fig.3 Equivalent circuit of brushless DC motor
2 数字PI调节器
连续系统 PI控制器的微分方程为:

(7)
式中KP为PI调节器比例系数;e(t)为输入函数;TI为积分时间常数。
将连续 PI控制器离散化,即得对应的数字PI算法,用向后差分代替微分[11],则有下式:
(8)
又因:

(9)
可得增量算式为:
u(k)=u(k-1)+KPΔe(k)+KIe(k)
(10)

图4 PI原理框图Fig.4 Block diagram of PI

Δe(k)=e(k)-e(k-1)
(11)
采用这种增量式数字PI算法可有效防止积分饱和现象。其工作框图见图4。
当e较小时,为保证系统的稳态性能,应增大KP和KI,同时为避免设定值附近系统震荡,考虑系统的抗干扰能力,应适当地选取KP;当e和Δe适中时,在不影响系统响应速度的前提下,为使系统响应的超调量减小,KP和KI都不能取太大;当e较大时,为避免起初偏差的瞬间变大而使控制作用超出许可范围[12],并加快系统响应速度,应取较大的KP,同时为防止积分饱和,避免系统响应出现较大的超调,应去掉积分作用,即KI=0。
3 无刷直流电机正反转控制
无刷直流电机的正反转控制与普通电机不同,在无刷直流电机运行的过程中,它的通电始终与电机的转子位置信号是分不开的,因此不能简单地通过改变定子绕组导通顺序来改变电机转向[13]。具体的电机转向与转子位置信号以及定子绕组之间的换相关系见表1。当位置信号的上升沿产生中断时,DSP进入中断服务子程序。通过将脉冲捕捉单元的脉冲捕捉口CAP1-CAP3设置成普通I/O口,并且检测这3个口的电平状态,确定电机的哪个位置传感器的电平发生变化,从而确定电机转子磁极所处的位置,然后按照电机正转的相序查找数据表来确定电机换相的顺序以及DSP比较单元的控制字,从而实现电机正转时的正确换相。
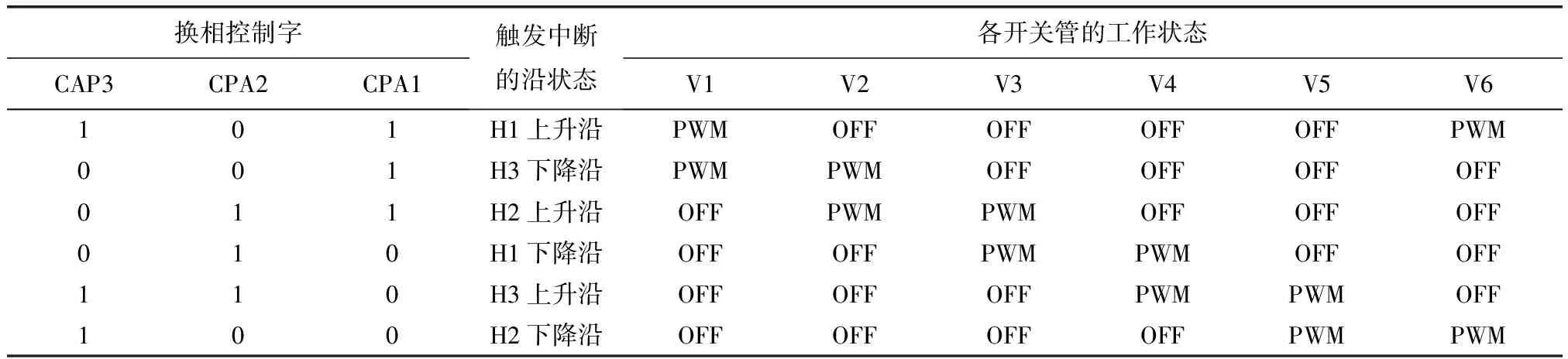
表1 电机正转的换相控制字和各开关管状态
电机反转的过程和电机正转类似,脉冲捕捉单元根据捕捉口的电平状态确定电机转子所处的位置,然后根据电平状态查找电机反转时能够正确换相的数据表来确定电机反转的换相顺序,从而实现电机的反转控制。其具体的位置信号和换相信息之间的关系见表2。

表2 电机反转的换相控制字和各开关管状态
4 系统仿真
系统的仿真是检验一个系统可行与否的一个重要环节。根据以上设计,采用软件MATLAB7.1中的Simulink工具箱对其进行仿真,系统仿真分为功率主电路仿真和系统的总体仿真。
4.1 功率主电路仿真
功率主电路由整流和逆变两部分组成。本设计的整流电路是简单的单相全桥不可控整流电路。仿真原理图及结果分别见图5、图6。

图5 单相全桥不可控整流电路仿真原理图Fig.5 Single-phase full bridge uncontrolled rectifier circuit simulation schematic

图6 整流输出波形Fig.6 Rectified output waveform
逆变分为有源逆变和无源逆变,当交流侧和电网连结时,这种逆变电路成为有源逆变。而交流侧与负载连结时称为无源逆变。本电路为三相电压型无源逆变。仿真电路见图7。
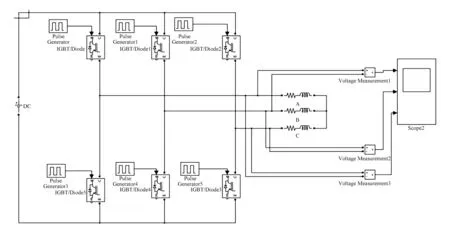
图7 三相电压型逆变电路Fig.7 Three-phase voltage-based inverter circuit
该电路连接的是三相Y型阻感负载,对负载的线电压进行了波形测定。仿真波形见图8。
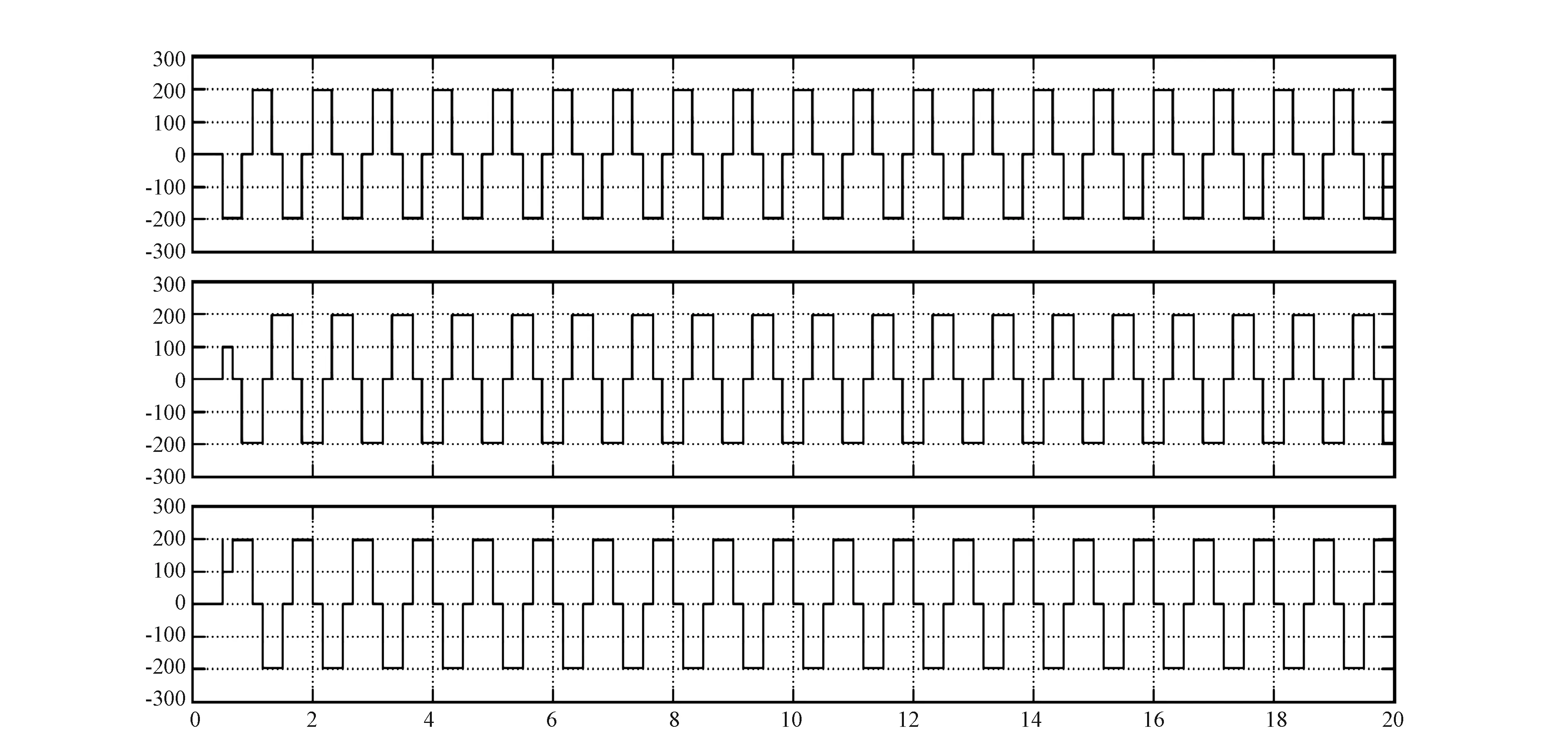
图8 三相的线电压波形Fig.8 Three-phase line voltage waveform
4.2 系统总体仿真
所设计的直流无刷电动机系统仿真模型,包括直流无刷电机本体、PWM功率驱动、霍尔信号输出及检测、PI调节、速度反馈和电流检测等子模块,见图9。
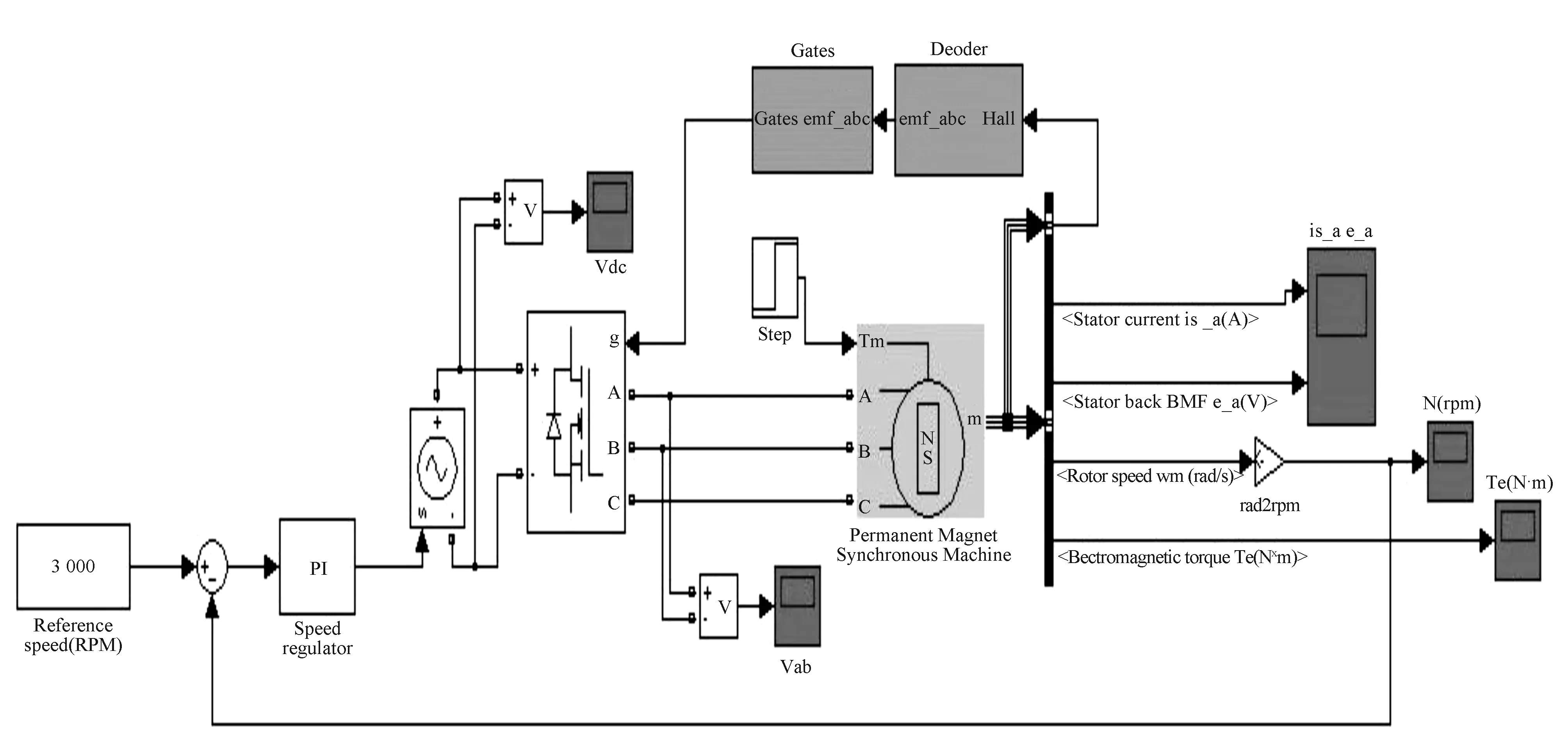
图9 直流无刷电动机系统仿真模型Fig.9 Simulation model of brushless DC motor system
本系统采用了PI调节,PI调节子模块的仿真图见图10。
给定转速为3 000 r/min时的速度响应曲线见图11。由图11可见,刚起步时,略微有些波动,在约0.15 s后基本稳定在3 000 r/min,性能良好。
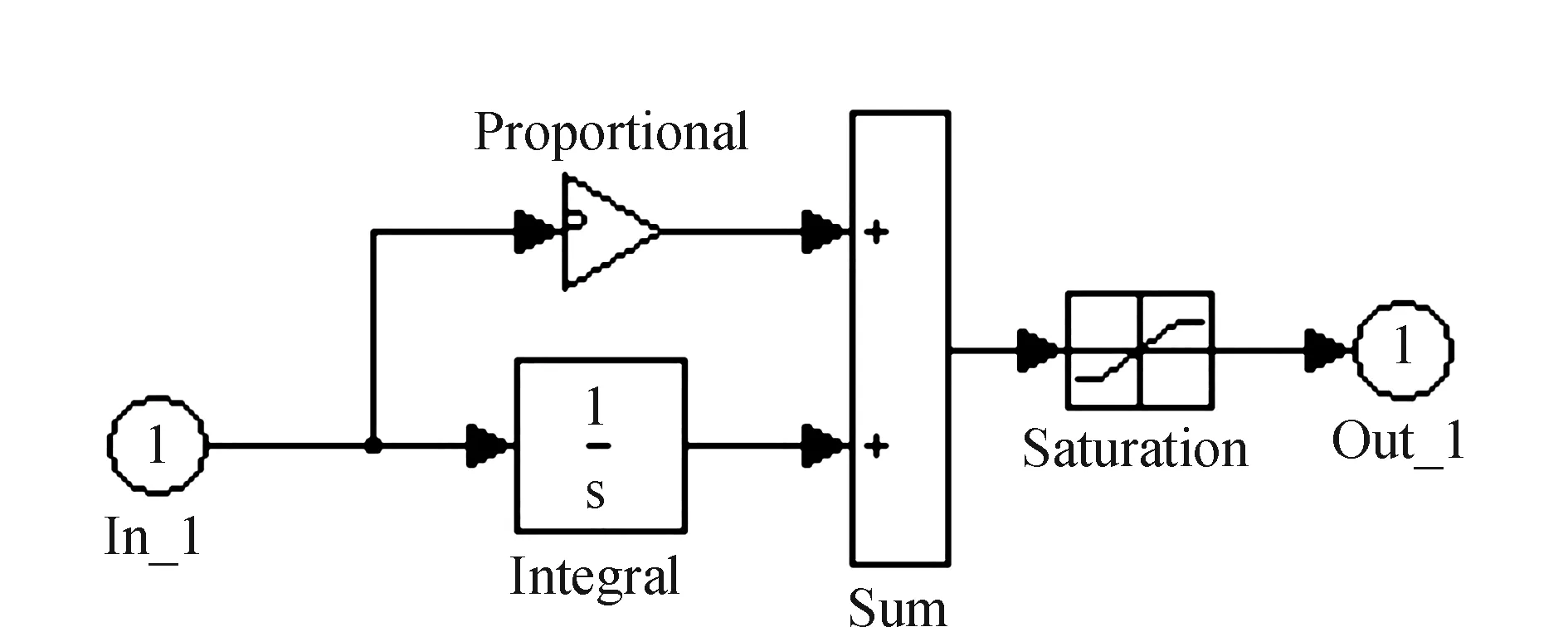
图10 PI调节子模块Fig.10 PI regulator sub-module
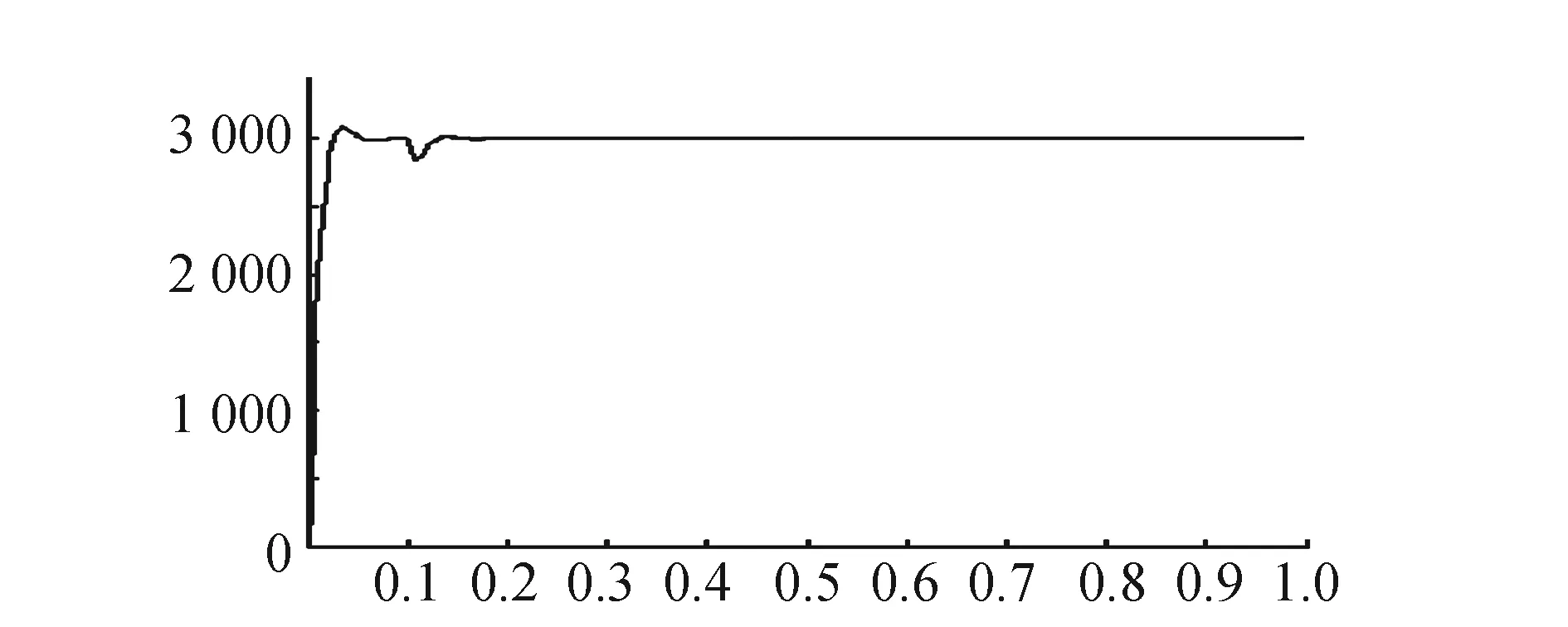
图11 给定转速为3 000 r/min时的速度响应曲线Fig.11 Response curve of speed when the given speed is 3 000 r/min
5 结 论
基于直流无刷电机的结构及工作原理,通过建立电机的数学模型,对三相直流无刷电机的转速、反电势等相应关系进行了分析。在分析直流无刷电动机的运行特性的基础上设计了有位置传感器的直流无刷电动机的控制系统方案。通过对系统的仿真,参考得到的给定转速为3 000 r/min时的速度响应曲线,系统的性能良好,设计可行。
[1] 王巍,潘松峰. 无刷直流电机控制系统设计及仿真[J].工业控制计算机,2011(9):49-50.
[2] 郭伟,陈一帆,周丽,等. 无刷直流电机分数阶PI预测函数控制研究[J].武汉理工大学学报,2013(4):130-135.
[3] XIA C L. Permanent magnet brushless DC motor drives and controls [M]. Singapore: John & Wiley Inc, 2012:65-80.
[4] 王军,冯能莲,张春强,等. 无刷直流电机模糊与PI双闭环调速系统的研究[J]. 安徽农业大学学报,2016(4) :662-666.
[5] 刘伟健,姜晓爱. 自适应模糊PID控制的无刷直流电机及仿真分析[J]. 科技创新与应用,2016(20):95.
[6] 周琛,单波. 无刷直流电机转速检测方法综述[J].矿业装备,2016(11):62-63.
[7] 赵晓峰,邓祁,金晨晨,等.基于MEMS技术MOSFETS硅桥结构磁传感器特性仿真与制作工艺[J].黑龙江大学工程学报,2017,8(3):50-55.
[8] CHEN C H, CHENG M Y. Implementation of a highly re-liable hybrid electric scooter drive [J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 3462-3473.
[9] WU Y Y, DENG Z Q, WANG X L, et al. Position sense-less control based on coordinate transformation for brush-less DC motor drives [J]. IEEE Transactions on Power Electronics,2010, 24(2): 1322-1341.
[10] 焦仁雷,谈乐斌,潘孝斌. 无刷直流电机模糊自适应PID的研究及仿真[J].机械制造与自动化, 2014(6) :93-104.
[11] 王葳,张永科,刘鹏鹏,等. 无刷直流电机模糊PID控制系统研究与仿真[J].计算机仿真, 2012(4):196-199.
[12] 陈运华,高凤岐,王广龙.直流无刷电机控制器设计与仿真[J].计算机仿真, 2012(11):239-242.
[13] 王捷,艾红.无刷直流电机转速闭环控制系统设计[J].自动化技术与应用,2017,36(9):22-26.
