基于强散射地物特征的SAR景象匹配技术
2018-01-06赵为伟宋晓伟
赵为伟,宋晓伟
(1.空军驻甘肃地区军事代表室,甘肃 兰州 730070;2.西安艾索信息技术有限公司,陕西 西安 710065)
基于强散射地物特征的SAR景象匹配技术
赵为伟1,宋晓伟2
(1.空军驻甘肃地区军事代表室,甘肃 兰州 730070;2.西安艾索信息技术有限公司,陕西 西安 710065)
SAR具有全天候、全天时等优势,且SAR图像数据种类丰富、信息量大,因此,开展SAR景象匹配技术研究具有重要的意义。但在图像辐射特征差异较大、低信噪比情况下,传统的SAR景象匹配技术很难满足。文中提出了基于强散射地物特征的SAR景象匹配技术,选择强散射地物作为更有效、稳定、易于提取的匹配特征,制定相应的特征匹配策略,并通过对各类场景真实SAR图像数据的实验验证,验证了该算法的有效性和适用性。
SAR景象匹配;强散射地物特征;特征匹配
SAR(Synthetic Aperture Radar)具有全天候、全天时、主动式、多频段、多极化、地表穿透能力、动目标检测能力等独特优势,已成为当今空间对地观测的重要手段[1-6]。高分系统所获取的SAR图像数据种类丰富,信息量大。因此,开展SAR景象匹配技术研究,必将提高航空、航天侦察应对高技术条件战争的能力,有效提高情报保障的时效性和准确性,进一步拓展军事应用领域,及时准确地为各类军事行动提供目标情报信息支持[7-9]。纵观国内外文献可以发现,目前有关SAR景象匹配算法的研究[11-16],大多是在待匹配的SAR图像的辐射特征一致性较好的假设条件下进行的,鲜有文献涉及图像辐射特征差异较大、低信噪比情况下的SAR图像匹配。从基于SAR的景象匹配辅助导航的实际应用来看,上述假设条件有时很难满足,存在众多复杂的因素影响着SAR传感器实时获取的图像质量[15-16]。
为此,本文选择了强散射地物作为更有效、稳定、易于提取的匹配特征,制定了相应的特征匹配策略,提出了基于强散射地物特征的SAR景象匹配技术,并通过对各类场景真实SAR图像数据的实验验证,验证了该算法能更有效地识别出更多的同名匹配特征,提高景象匹配系统性能。
1 SAR景象匹配技术
SAR景象匹配技术的核心思想是通过提取某种稳定的共性匹配特征,建立参考图和实时图的模式特征空间,再根据一定的判定准则搜寻参考图中与实时图具有最相似模式的位置,进而确定参考图与实时图之间的空间映射关系。
人工建筑物等强散射地物相对于其他匹配特征而言,信噪比较高容易提取,且由于不属于自然地物,是一种稳定性和重复度都较高的匹配特征。基于强散射地物的SAR景象匹配技术,其匹配策略就是利用强散射地物之间的空间位置关系(Spatial Consistency)作为匹配特征的模式描述,通过投票的方式识别出同名匹配特征,基本步骤如下:(1)首先,基于平稳小波多尺度系数融合与P-tile算法从参考图与实时图中分割出若干强散射地物,并以其外包络形状质心作为特征点,得到特征点集;(2)通过矢量投票的方式确定匹配特征点间的一一对应关系;(3)采用基于NMI测度的局部模板匹配方法,重新定位同名匹配特征点位置;(4)最后,使用多项式模型将实时图映射到参考图上。
1.1 强散射地物提取
应用常规的SAR目标检测算法从参考图与实时图中检测强散射地物时,同一强散射地物会在不同入射角的图像中检测为若干小散射体,导致不同入射角SAR图像中所检测出的匹配特征迥然不同。为提取尽可能完整的地物外形作为匹配特征,本文基于平稳haar小波提取SAR图像强散射地物特征。
SAR图像小尺度的低频分量保留了目标精细的位置和结构信息,但存在较多的噪声和背景杂波。同时,分布目标在小尺度下呈现为多个细碎的点目标,导致不同入射角下的分布目标的细节差异很大,难以作为共性特征进行匹配。而大尺度的低频分量可以滤除分布目标的噪声、背景杂波及细节差异,但会使目标位置信息损失和形状畸变。随着分解层数的增加,目标相对于背景的能量被增强了,而且目标能量有向四周扩展的趋势,同时在不同尺度的低频分量图中,目标所在位置处都有较大的能量。
经小波多尺度低频系数融合后,强散射地物相对于背景的幅度大大增强,同时连续性得到提高,此时可以简单的认为图像仅由强散射地物和背景组成。然后,通过P-tile阈值法,分割出强散射地物二值图。具体方法是:依次累计待分割图像的灰度直方图,直到该累计值大于等于目标地物所占面积,此时的灰度级即为所求的阈值。通常,强散射地物占整幅图像的面积百分比P%由景象匹配任务中适配场景的参考图及其地物分布等先验知识事先估计。
1.2 基于投票机制的特征匹配算法
通过基于平稳小波的强散射地物分割,分别获得了参考图与实时图的特征点集,由于几何和灰度特征差异仍然较大,直接采用传统的匹配算法进行同名匹配特征点识别比较困难。但强散射地物之间的相对位置关系基本保持不变,其位置关系可以作为一种鲁棒性极强的模式特征来描述地面目标。通过在2幅不同辐射特征的SAR图像间寻找出拥有相同模式特征的强散射地物,就可以确定出同名点对,从而实现匹配。
类似于模式识别中的目标识别,可以采用矢量投票的方法在参考图中识别出实时图中的关注地物。矢量投票的基理就是从关注目标的模式描述表中依次取出每个矢量描述,然后在参考图关系表中寻找与之接近的矢量描述。由于矢量既有长度又有方向,因此只有长度和方向接近的矢量之间差值的模才接近0,此时参考图和实时图中矢量指向的点都获得1票。而其他长度和方向不同的矢量之差的模值会很大,矢量指向的相应的点不会获得投票。凭借着矢量的方向性,可以很好的防止其他模式的误投票。实际中,参考图与实时图中的强散射地物的位置关系存在一定的偏差和轻微的旋转(一般<2°),这会导致矢量之间的长度与方向并不完全一致,因此误差容限δ可以设一个较小的数值。
在投票结束之后,在理想情况下,即实时图中的地物在参考图中都存在,考虑在实际应用中地物分布复杂,关注地物周围可能存在漏检地物和其他接近的矢量描述,投票结果有可能错误。仿效SIFT算法中的匹配判决策略,计算票数最多与票数次多的两个候选同名匹配特征点的票数比,如果票数比>2,即获得最高票数的匹配特征点是次之的匹配特征点票数的2倍,即接受这个匹配判决结果,否则拒绝。
2.3 匹配特征点坐标重定位
通过投票机制,可建立参考图与实时图的同名匹配特征点集。然而由于强散射地物的外形包络对雷达波束入射角度非常敏感,不同入射角的SAR图像中的地物包络的质心通常都是不同的。根据提出的强散射地物分割方法,所获得的参考图与实时图初始特征点集中的同名点的对应位置坐标并不准确,误差有时大的难以接受。其根本原因是提出的小波变换多尺度低频系数融合只能在有限范围内连接断裂的强散射地物,而无法外推其消失或发生迁移的部分,这会导致分割出的地物二值图的形状有较大差异,质心位置并不相同。因此,通过投票方式所获得的潜在同名匹配特征点对的质心位置坐标不得不进行修正,即重定位。
由于雷达波束入射角度的不同,参考图与实时图之间存在轻微的旋转、几何畸变和辐射畸变,经典的NPROD测度无法准确地求出真正的同名匹配特征点的位置。NMI与其他测度不同,不作图像灰度值是一对一的假设,因此适合于多模图像的匹配。由于NMI只在统计意义上度量图像间的相似度,因此可以忽略图像间的旋转、几何与辐射特征差异。我们假设潜在的同名特征点对之间的位置误差半径不超过R,则可以应用NMI通过局部模板匹配的方式进行匹配特征点坐标重定位。具体说就是选择以qi为中心,半径为ρ的圆形模板在pi的R半径内做遍历度量,选择NMI值最大的位置作为最优定位位置。
NMI可以很好的估计出辐射特征差异很大的地物图像间的统计相似性。尽管某些强散射地物的大部分消失或衰弱,但其仍能较好地寻找出同名匹配特征点的真正对应位置,这都归功于NMI可以充分挖掘蕴含在图像中的统计共性信息。另外,对于某些分裂成多个子目标的强散射地物,经过基于NMI的局部模板匹配后,都合并成一个坐标。
2 匹配实验及结果分析
2.1 典型的SAR景象匹配算法实验
基于特征的景象匹配算法在SAR图像辐射特征差异较大、信噪比低条件下进行匹配实验。借鉴某文针对SAR图像改良的SIFT算法,先利用增强的Frost滤波器进行相干斑抑制以降低匹配难度,滤波窗口大小选为5×5。然后基于SIFT特征点提取算子,提取相干斑抑制后的SAR图像的特征点。精细调节SIFT算子的检测参数,使虚警概率很低,结果如图1所示。
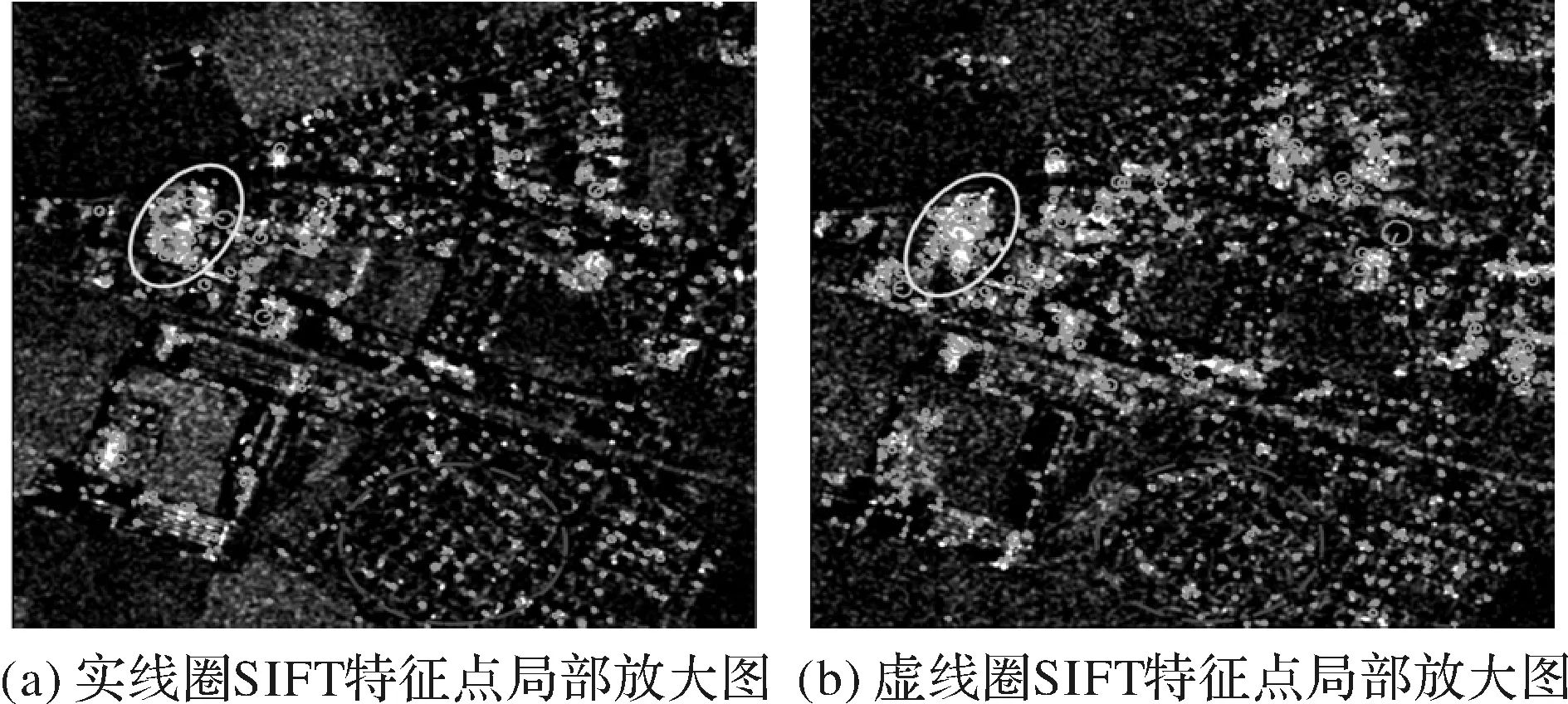
图1 不同入射角、低信噪比SAR图像SIFT特征点图
放大图1中实线圈与虚线圈区域做局部图像观察分析,如图2所示。
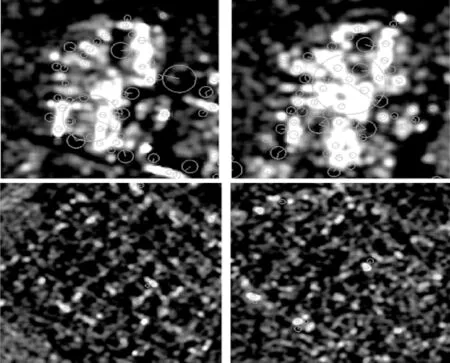
图2 SIFT特征点局部放大图
由于SIFT特征点提取算子是基于微分和边缘特征的,因此在SAR图像强散射地物边缘附近检测出大量对比度高的特征点,如图1(a)所示。不同入射角SAR图像间的辐射特征差异很大,导致图1的匹配结果存在大量误匹配。
2.2 匹配算法实验
上述典型SAR景象匹配算法面对不同辐射特征、低信噪比SAR图像时出现了误匹配。为了验证本文算法的鲁棒性,采用与上述实验相同的图像数据,图像场景大小为1 000×2 000,选择36.5°入射角的SAR图像作为参考图,如图3(a)所示。从21°入射角的SAR图像中,均匀地随机截取100幅800×800大小的子图作为实时图,如图3(b)所示。因为场景中的强散射地物通常分布不均匀,所有子图中的特征点数量也会随机变动。此外,参考图比实时图大,大图与小图匹配时会有大量outlier存在。这些特点保证了实验条件接近景象匹配导航应用的实际情况。
实验过程中,算法中的参数设置为:小波分解层数K=3,强散射地物提取步骤中的目标区域百分比,根据场景复杂度等先验知识,设置为4%,矢量投票中的误差容限δ设为10,匹配判决门限为2,基于NMI的局部模板匹配最大搜索半径设为15,圆形模板半径为40。图3中的实心圆点为参考图与实时图匹配的一次实现。
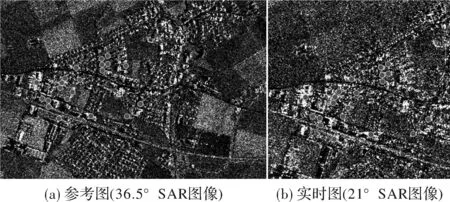
图3 参考图与实时图的一次匹配实例
可以看出,尽管参考图与实时图辐射特征差异较大,图像信噪比较低,但本文算法仍实现了正确匹配。
图4为匹配判决门限为2时的100次匹配实验结果曲线图,其中包括每次实验的匹配特征点对数量和匹配精度RMSE(Root Mean Square Error)。
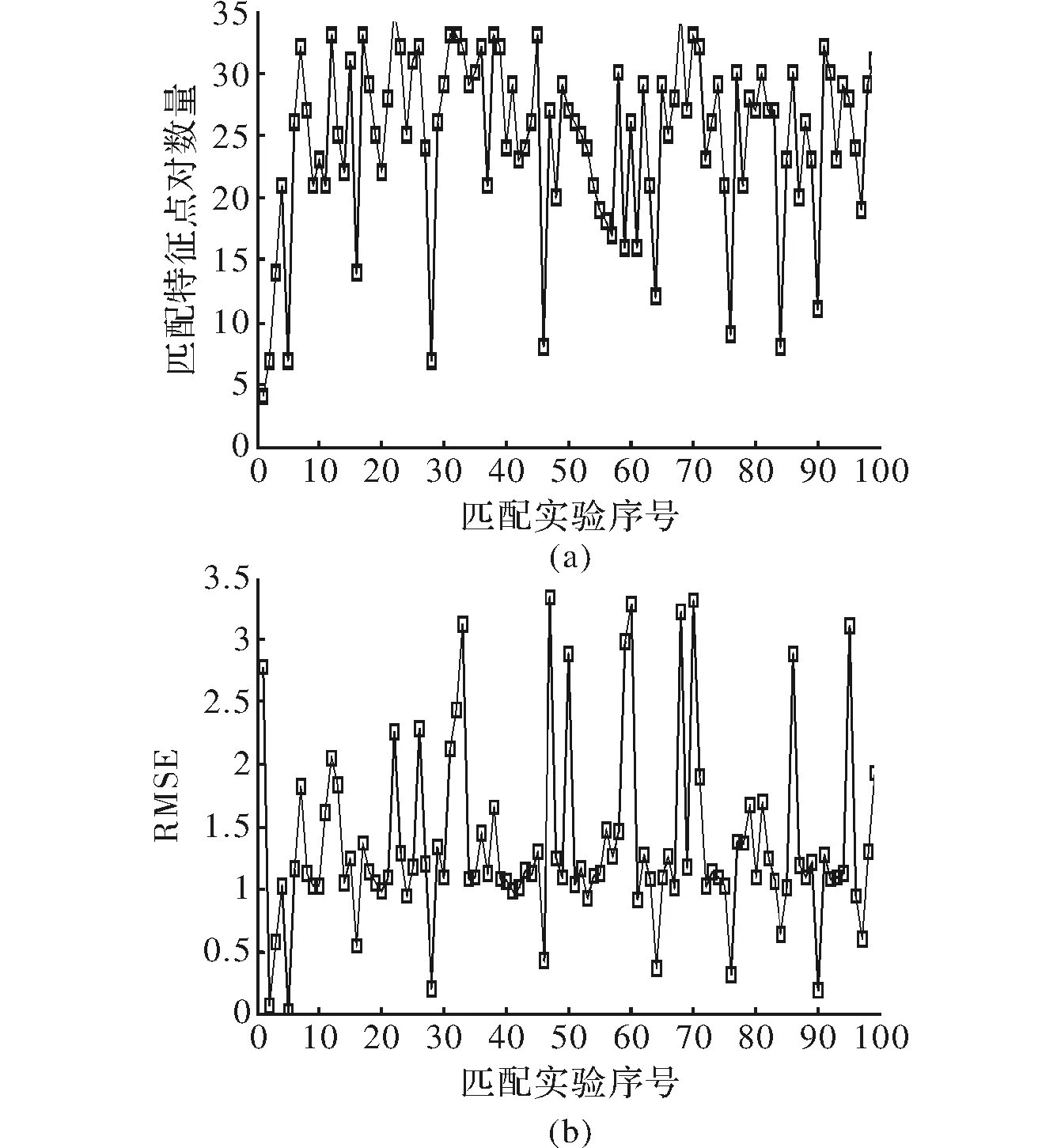
图4 100次匹配实验结果的匹配特征点对数量和RMSE

平均匹配点对数实时图平均特征点数参考图特征点数平均RMSE2042918116513913
从上述匹配实验结果看,该算法具有较强的鲁棒性,平均匹配精度可以达到约1个像素,平均匹配点对数约20个,完全可以满足景象匹配导航应用的需要。此外,匹配判决门限为2的设定,杜绝了误匹配的发生,可以证实为比较严格的门限。但是,个别实验的RMSE值偏大,匹配特征点数量较少。
3 结束语
为了使SAR景象匹配算法真正适应于各种恶劣情况,放宽对系统平台的约束。本文选择在恶劣情况下适合匹配的有效匹配特征—强散射地物作为匹配特征,并制定相应的匹配策略,提出了基于强散射地物特征的SAR景象匹配技术。通过与经典算法的实验对比,证明了本文提出的算法在匹配特征的选择和匹配算法的鲁棒性等方面优于多种经典算法。通过真实SAR图像的实验,也验证了本文算法的有效性和稳定性。
[1] 于秋则,程辉,田金文,等.基于边缘特征的SAR图像与光学图像的匹配[J].雷达科学与技术, 2003,1(4):242-245.
[2] 康欣,韩崇昭,杨艺.基于结构的SAR图像配准[J].系统仿真学报,2006,18(5):1307-1310.
[3] 任三孩.弹载SAR景象匹配制导关键技术研究[D].长沙:国防科学技术大学,2011.
[4] 杨朝辉.SAR景象匹配中边缘特征基准图的制备方法[J].苏州科技学院学报,2015,32(4):57-62.
[5] 李娜,刘方.基于模糊聚类视区划分的SAR目标识别方法[J].电子学报,2012,40(2):394-399.
[6] 韩萍,梅雪兰,吴仁彪,等.一种提高SAR目标识别率的有效方法[J].中国民航大学学报,2003,21(3):6-9.
[7] 姜百汇.图像匹配技术在巡航导弹中的应用[J].战术导弹技术,2001(2):54-61.
[8] 安如,王慧麟.图像匹配制导技术研究[C].北京:全国图像图形学学术会议,2006.
[9] 于秋则.合成孔径雷达(SAR)图像匹配导航技术研究[D].武汉:华中科技大学,2004
[10] Franceschetti G, Migliaccio M, Riccio D.The SAR simulation: an overview[J].IEEE Transactions on Circuit,1995(7):2283-2285.
[11] 李素敏,张万清;地磁场资源在匹配制导中的应用研究[J].制导与引信,2004(3):98-102.
[12] 安如,王慧麟,晏翔.基于SIFT和渐进局部几何约束的多源遥感图像自动匹配研究[C].北戴河:全国图像图形学学术会议,2008.
[13] 安如,王慧麟.遥感图像匹配方法研究[M].南京:河海大学出版社,2006.
[14] 程华,田金文.基于双近邻模式和最小二乘支持向量机的SAR景象匹配区选择[J].宇航学报,2009,30(4):1626-1632.
[15] Polidori L.SAR image simulation strategies for mapping[M].MI:Commission III Working Group,1998.
[16] 韩先锋,李俊山,毕义明,等.基于混合遗传算法的景象匹配技术研究[J].微电子学与计算机,2004(8):109-113.
A Scene Match Technology of SAR Based on Ground Features with Strong Scattering
ZHAO Weiwei1,SONG Xiaowei2
(1. Military Representative Office of Air Force in Gansu,Lanzhou 730070,China; 2. Xi’an iTHOR Information Technology Co.,Ltd,Xi’an 710065,China)
SAR is applicative in any weather and any time, and the SAR pictures have many types which have huge information. Studying the scene match technology of SAR is very useful. However, traditional scene match technology can't be used if the difference of pictures is huge and the SNR is low. A scene match technology of SAR based on ground features with strong scattering is proposed in this paper. The ground features with strong scattering is selected to be the match feature which is more effective, stable and easy to be abstracted. And experimental results validate our proposed method is effective and applicative.
scene match technology of SAR;ground features with strong scattering;feature match
2017- 03- 16
赵为伟(1969-),男,硕士。研究方向:雷达系统技术。宋晓伟(1982-),男,硕士,研究方向:雷达系统技术。
TN957.52
A
1007-7820(2018)02-081-04
