基于无先验声速的迭代搜索定位方法∗
2018-01-04于平谢胜
于 平 谢 胜
1 引言
水下大范围跟踪定位一般需要在目标上加装合作信标,测量阵元布设成基线几公里的四边形观测几何,对阵内目标进行定位跟踪测量。测量阵元通常利用应答方式或同步方式获得测距信息,至少需要3个阵元的位置信息,以及目标的传播时延测量信息联立球面交汇方程组[1~8]。
迄今国内外几乎所有的水下定位系统,均事先采用水文测量获取平均传播声速,计算与传播时延测量值的乘积,换算成各阵元的测距信息。
常规定位算法或解算模型的弊端在于:1)需要事先通过水文测量,获取平均传播声速的先验值,并装订于定位软件;2)事实上,水中传播声速具有显著的时变、空变特征,各阵元因信道差异而导致声速的非一致性,且发生较快速的数值起伏现象;3)当平均声速装订值出现偏差时,由球面交汇方程组解算的目标位置,致使定位的系统误差和随机误差增大[4~12]。
2 无先验声速迭代搜索方法
2.1 算法模型
在海底或海面布设N个测量阵元,水下目标作定深航行,目标声源在同步信号触发下周期性地发射声信号,各接收阵元接收测量声信号传播时延,建立球面交汇模型[1~8]:
式中,未知量(X,Y,Z)为待测目标的位置坐标;(Xi,Yi,Zi)为阵元i的位置坐标;Ci为阵元i对应的传播声速;τi为目标到阵元i的声传播时延,由水声跟踪定位系统测得。
建立观测矩阵方程:
式中,(X,Y,Z)表示本次迭代计算预测值,( X0,Y0,Z0)表示初值(前次迭代计算预测值),α为迭代搜索步长。矩阵及向量表示为
2.2 迭代搜索模型
任意选取目标的初值位置(X0,Y0,Z0),按照如下迭代过程进行解算:
1)设置海区可能的声速最小值到最大值范围,各阵元假定任意一组声速搭配,由式(1)建立球面交汇方程组,按照如下2)~4)步骤进行循环搜索迭代求解;
2)由式(2)矩阵方程进行一步预测,得出新的目标位置坐标;
3)根据式(5)计算各阵元测量斜距与预测值斜距的差值并统计均方误差;
4)判断该均方误差是否小于设定门限,未达到门限即将本次预测值作为初值重复以上2)~4)步骤,直至收敛于稳定的均方误差;
5)按照各阵元声速的配对关系,挑选均方误差极小值,对应的预测值即为目标的位置坐标,对应的声速组即为各阵元对应的声速。
2.3 模型分析
充分的试算表明,迭代算法稳健收敛,通常经3~4步即完成收敛运算。值得注意,矩阵方程的迭代步长由经验确定,以确保算法的收敛性和收敛速度。
算法模型的描述基于冗余测量,对方程数约束较宽,因此多个方程参与迭代可抵消测量误差,从而提高定位精度。当有效阵元个数即方程个数与未知量个数相等时,由于没有冗余信息判别真解、假解(双解现象),此时算法将收敛于距离初值位置较近的真解或假解。也就是说,如果没有冗余阵元信息,初值选取不当算法有可能收敛于假解。鉴于这种情况,初值选取的原则是:尽可能根据测量方案的先验知识,将初值限定于目标就位点位置的小范围内,尔后的解算初值只需要替换前一帧的迭代结果即可。
3 无先验声速迭代搜索方法应用效果分析
3.1 海面浮标基阵定位系统海上静态实验精确度评估结果
如图1所示,测量基线约4km,声源深度约6m,浮标DGPS精度约0.6m,目标声源DGPS精度约0.25m,定位系统采用同步测距工作方式[12]。在E1点区域共获得1~3组数据,E2和E3区域分别获得4、5组数据。
表1列出了常规定位模型的系统误差和随机误差,同时给出固定声速迭代算法(取水文测量声速值)和声速搜索迭代算法(声速搜索范围1530m/s~1540m/s)的定位精确度评估结果,最后由搜索声速的平均值再次带入固定声速迭代模型进行解算评估。数据表明,由声速搜索迭代算法平滑求解声速平均值,再带入固定声速迭代算法进行解算,可明显改善阵中区域的精确度。
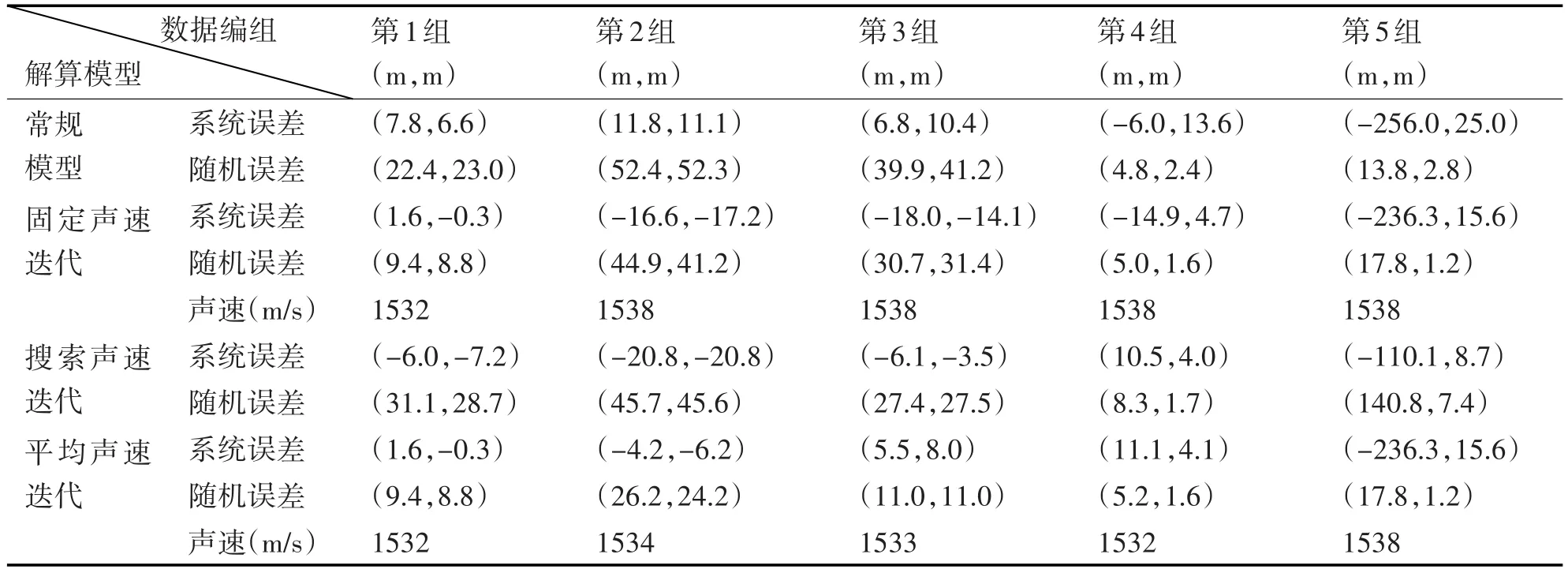
表1 海面浮标基阵定位系统海上静态实验精确度评估结果
3.2 海面浮标基阵定位系统海上动态实验精确度评估结果
在图2中,4枚海面浮标阵元布设成四边阵形,基线约2海里,目标声源深度7m。目标航迹分成了3段典型航路,定位系统采用同步测距工作方式。
表2数据对定位算法精度进行比较,同时给出固定声速迭代算法(取水文测量声速值)和声速搜索迭代算法(声速搜索范围1520m/s~1540m/s)的定位精确度评估结果,分别给出测量精度的统计评估。数据表明,常规解算模型存在着较大的系统偏差和随机误差,尤其当采用固定声速的迭代算法后,阵中区域可明显提高测量精确度。
3.3 海底潜标基阵定位系统海上动态实验精确度评估结果
在图3中,共布设6个海底潜标,分别组成1×2km和2×2km测量阵形,共获得2个航路的实验数据。

表2 海面浮标基阵定位系统海上动态实验精确度评估结果
海区深度约40m,声速分布呈负梯度,询问换能器深度约5m,采用询问应答测距方式。将试验航路分为4段分别给予数据处理,装订平均声速1532m/s进行固定声速迭代解算,统计精确度列于表3。
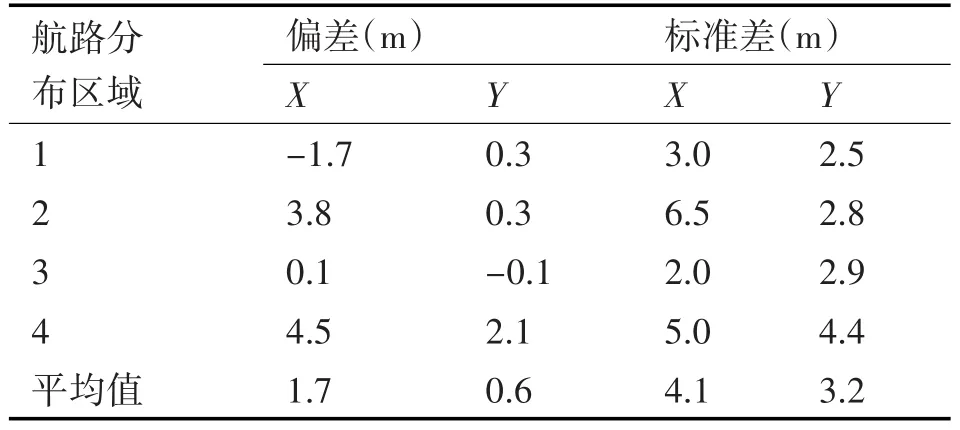
表3 海底潜标基阵定位系统海上动态实验精确度评估结果
结果表明,缩短基线有利于提高定位精度,缘于多路径干扰减弱,但是极限定位精度大约只能达到2m~3m。此外,固定声速的装订对定位标准差影响较大,为提高定位精度,必须在精度评估的基础上慎重考虑声速的装订问题。
4 结语
无先验声速迭代定位算法,实现了对各阵元非一致声速进行折中的平滑处理,而无需装订先验的声速值。尤其利用冗余阵元的预测迭代解算时,多个方程参与迭代可以抵消测量误差,从而提高定位精度,并且能够自动搜索各阵元声速。仿真及海试结果表明,该算法稳健收敛,运算速度快。
[1]田坦.水下定位与导航技术[M].北京:国防工业出版社,2007:46-65.
[2]李守军,包更生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):130-135.
[3]李嶷,孙长瑜.不同布阵方式下球面交汇定位系统性能分析[J].声学技术,2008,27(5):649-653.
[4]吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003,23(4):18-21.
[5]R.J.尤立克.水声原理[M].洪申译.哈尔滨:哈尔滨船舶工程学院出版社,1990:79-183.
[6]马大猷.现代声学理论基础[M].北京:科学出版社,2004:5-31.
[7]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,2002:59-119.
[8]钱洪宝,孙大军.水声定位系统现状[J].声学技术,2011,30(3):389-391.
[9]Lurton X.Swath bathymetry using phase difference:Theoretical analysis of acoustical measurement precision[J].IEEE Journal of Oceanic Engineering,2000,25(3):351-363.
[10]杨日杰,王正红等.浮标阵形对搜潜效能影响的研究[J].计算机仿真,2009,20(12):16-20.
[11]王泽民,罗建国等.水下高精度立体定位导航系统[J].声学与电子工程,2005,2:1-3.
[12]于平,吴波.长基线水声定位基阵阵形优化设计.舰船电子工程,2015,35(5):125-127.
