车联网关键指标对车辆安全影响仿真测试方法∗
2017-12-18柴琳果蔡伯根王化深上官伟
柴琳果,蔡伯根,2,3,王化深,2,上官伟,2,3,王 剑,2,3
车联网关键指标对车辆安全影响仿真测试方法∗
柴琳果1,蔡伯根1,2,3,王化深1,2,上官伟1,2,3,王 剑1,2,3
(1.北京交通大学电子信息工程学院,北京 100044; 2.北京交通大学,轨道交通控制与安全国家重点实验室,北京 100044;3.北京交通大学,北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044)
提出了一种用于分析车联网关键指标对车辆安全影响的仿真测试方法。首先,基于微观交通流仿真软件设计了危险跟驰、换道等基础仿真场景;然后,分析了基于高斯分布的定位误差模型和单跳通信延误模型,并建立了定位误差、通信延误和渗透率在仿真过程中的执行策略;接着,基于车辆最小安全距离跟驰模型和车辆非线性分段制动模型分别提出了车辆危险跟驰预警和危险换道预警方法;最后,通过建立基于HLA(high level architecture)的车联网仿真平台对不同定位误差、通信延误和渗透率对车辆安全的影响进行了仿真测试。结果表明,在危险跟驰场景中,在注入了基于高斯分布的定位误差后,预警成功率为88%,预警成功率随着预警策略中减速度的减小而增大;在危险换道场景中,在注入了单跳通信延误后,预警成功率达100%;成功预警数随着OD(origin destination)取值和渗透率的增大而增大,并且受渗透率影响更加明显。
交通工程;车辆安全;仿真测试;车联网;仿真场景
前言
随着传感器技术、通信技术的发展,车联网系统在保证车辆安全方面的优势日益体现,车辆状态数据的采集和估计更加准确,车车、车地之间的信息交互也更加可靠[1]。但在实际车联网系统的设计与开发过程中,不同的定位模式会导致定位精度的巨大变化[2],且不同通信模式的选择也会对系统的信息交互带来一定的不稳定性[3-4],虽然多传感器融合定位和多通信模式竞争可在一定程度上缓解定位准确度的下降和通信性能的降低对系统的影响,但系统关键环节的核心参数在数据表示层面仍然不能表现出完全统一的特性,尤其是在城市道路中,城市峡谷所产生的遮挡和多径效应,导致车辆定位误差仍然存在,通信丢包和通信延误也不能完全消除。
车联网系统中关键参数的不稳定会对车辆安全控制效果产生巨大影响,在车辆安全控制方面,一方面,研究人员研究用提升设备性能的方法来降低对车辆状态估计的难度和保证信息交互的可靠传输,另一方面,学者也在研究多传感器深耦合定位技术和通信协议的优化方法来提高定位精度和通信可靠性。因此,考虑设备和算法性能的车辆安全测试方法显得尤为重要,目前国内外在车辆安全测试方面进行了许多研究。
文献[5]中研究设计了基于MATLAB/Simulink和车辆动力学软件CarSim的电动车辆驱动控制系统仿真测试平台,能针对不同型号的电动车辆,方便快捷地匹配不同类型的电机,设计整车驱动力控制策略;文献[6]中采用WorldSID假人对因为驾驶员说话分散注意力而产生的事故进行了模拟,分析了副驾驶位置假人的受伤情况;文献[7]中介绍了ITDNS(integrated traffic-driving-networking simulator),并通过15名平均年龄26.13岁的驾驶员的实测数据对该仿真器模型进行了矫正。
由于可能存在安全隐患,所以目前关于车辆安全的测试中并没有人的实际参与,多采用仿真的手段进行测试。目前车辆安全测试研究主要集中在两个方面,一方面是研究如何基于实测数据建立具有高逼真度的仿真环境,另一方面是在成熟的仿真环境或者半实物仿真环境中对车辆安全进行测试。
采用仿真的手段来测试评估车联网中车辆关键参数对车辆运行安全的影响具有一定优势,目前国内外针对车联网定位误差、通信性能和渗透率等也有一定的研究基础。
文献[8]中通过驾驶辅助和主动安全仿真软件PreScan研究了无信号交叉口的车辆避撞方法,提出了through-through车辆避撞策略,一定程度上给出了车辆在交叉口穿插通行问题的解决方案;文献[9]中提出了一种基于载波相位异常检测和验证的方法来提高车辆的动态定位性能,并通过仿真验证其正确性;文献[10]中研究了车联网中渗透率和MOEs(measures of effectiveness)的关系,提出了一种基于最小渗透率的路网MOEs精确估计方法。
可以看出,目前在车联网车辆安全仿真测试的研究中,对特定功能,如定位性能、通信性能和道路渗透率等的测试较为常见,但缺少建立在多模块、多子系统协同运作之上针对某一特性对系统影响而建立的测试方法。
在考虑车辆定位性能、通信性能和联网车辆渗透率的基础上,本文中设计了一种车联网关键指标对车辆安全影响的仿真测试方法。通过建立基础的交通流仿真环境、信息交互环境和车辆预警控制机制,在实现基本车联网车车、车路交互仿真的基础上,设计了定位性能、通信性能和联网车辆渗透率在仿真平台的运行机制,结合危险跟驰和危险换道仿真场景,进行关键环节对车辆安全影响的分析和评价。
1 仿真与测试方法概述
为更符合车联网中车辆运行状态和信息交互过程,本文中基于HLA[11]建立了基本仿真环境,设计了5个仿真联邦,分别为交通仿真、通信仿真、行为控制、管理评估和三维视景联邦。仿真框架如图1所示。
其中,交通仿真联邦主要模拟交通流特性,基于Q-Paramics[12-13](以下称Paramics)微观交通仿真软件建立,实现危险仿真场景生成、定位性能和渗透率的模拟;通信仿真联邦主要功能包括路侧节点设置、节点信息获取机制模拟、节点信息的数据库存储和通信性能模拟,以模拟车辆的通信过程;行为控制联邦主要依据交通仿真数据和通信仿真结果对道路中的危险场景进行危险预测,并给出预警信息和冲突消解策略;管理评估联邦主要实现危险场景参数设置和关键环节参数对交通影响的评价;三维视景联邦主要通过VEGA三维软件进行可视化显示。仿真测试流程如下:
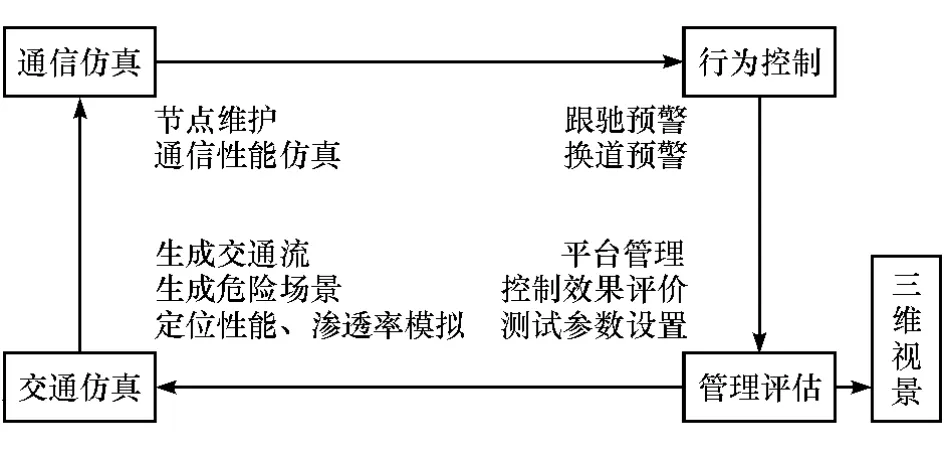
图1 仿真框架
(1)仿真开始,生成仿真场景,交通仿真联邦在生成交通流之后,根据测试信息,基于车辆状态预演生成危险跟驰和换道仿真场景;
(2)交通仿真、通信仿真、行为控制联邦成员判断测试信息,触发被测参数的运行机制,将其影响效果叠加到危险跟驰和换道仿真场景中;
(3)行为控制联邦成员对路网的所有车辆状态进行遍历,辨识车辆危险,给出驾驶员预警信息;
(4)管理评估联邦成员对仿真测试结果进行统计分析,给出车联网关键环节参数的仿真评价结果。
基于以上流程,即可完成对某一关键指标参数对车辆安全影响的仿真测试。
2 基于轨迹预演的危险仿真场景生成方法
为使仿真更加贴近真实情况,本文中采用Paramics作为交通仿真的基础模块。车联网系统建立在传统交通系统基础之上,在车联网车辆未达到100%路网渗透率的情况下,势必会出现多种类型车辆混合运行的模式,Paramics可很好地模拟社会车辆的运行;车联网系统中对于车辆安全相关功能的仿真验证大多是基于仿真场景的,为使仿真场景更加真实,仿真场景应尽可能从正在运行的仿真路网中动态生成,这样才能保证仿真场景的可信度;Paramics能够提供动态的交通仿真环境,能够产生符合交通流规律的运行车辆;通过建立仿真平台给测试提供环境和条件,仿真测试的优点之一是可重复性,Paramics能在一次仿真中持续产生交通流,并多次生成仿真场景,实现测试的可重复性;对于车联网中关键指标的测试,应能精确地生成仿真场景,并精确地进行车辆控制,Paramics的API(application programming interface)接口提供对车辆控制的支持,能降低开发工作量。目前其他的微观交通流仿真软件如Vissim和SUMO等具有完全的单车控制接口,也可作为交通仿真模块备选。
Paramics等微观交通仿真软件目前被研究人员应用较多,但其底层模型较为理想化,不会在仿真系统中自发产生交通冲突,例如追尾、侧撞等现象。因此,若不进行二次开发,很难基于该类软件实现对危险跟驰和换道行为的模拟,也不能实现针对该类场景的预警方案的仿真验证。本文中结合Paramics的API函数对仿真运行的车辆参数进行设置,实现危险跟驰和危险换道仿真场景的精确控制。
2.1 危险跟驰场景
交通仿真联邦接收到危险跟驰场景之后,开始分析路网车辆状态数据,判断路网车辆之间的跟驰关系,之后随机选择距离超过100m的同车道相邻两辆车(前车设为A,后车设为B),通过增大后车B的加速度来提高车辆速度。经验数据表明,车辆在道路行驶最大加速度一般不超过6m/s2,当车辆到达场景参数规定的最大速度时,后车停止加速,保持匀速行驶。车辆速度的变化量和加速度的关系如下:

式中:vs(n)为第n个仿真步长中后车的速度值;as为最大加速度,取为6m/s2;ts为仿真步长,取50ms。若不进行车辆预警控制,后车高速行驶,将会与前车发生追尾事故,如图2所示。
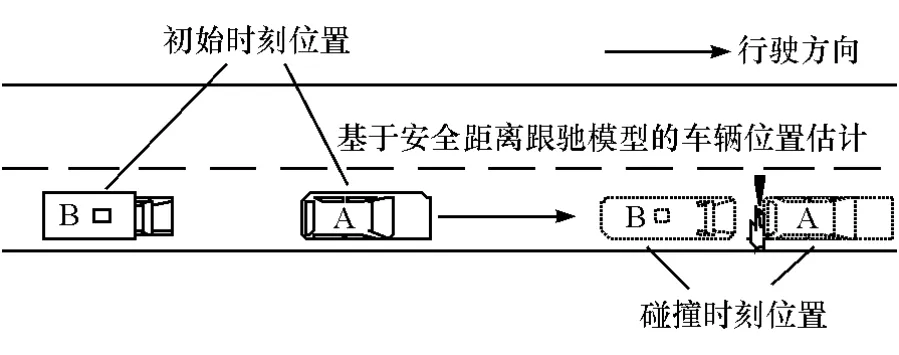
图2 危险跟驰场景生成
2.2 危险换道场景
随机锁定一辆行进中车辆A,计算并获得A车周围100m内与其不在同一车道上的其他所有车辆信息,通过比较同道路不同车辆距离前方交叉口的距离来判断车辆之间的前后关系。选择距离A车最近且在A车后方的车辆B,根据危险跟驰场景生成方法对B车进行加速至场景规定速度,然后通过车辆制动模型对B车的行驶轨迹进行预演,如果B车采用最大制动加速度时仍然可能会和变道之后的A车发生追尾危险,此时控制A车进行换道行为,生成危险换道场景,如图3所示。
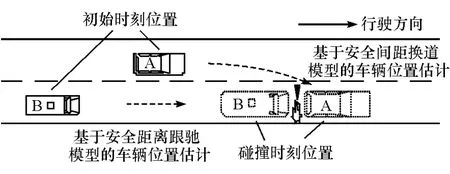
图3 危险换道场景生成
2.3 Paramics接口调用方法
交通仿真联邦包括两部分:Paramics部分和控制程序。Paramics部分主要功能一方面是建立仿真路网、设计OD矩阵、设置道路渠化信息等,建立路网环境。其中,OD表示出发节点到目标节点的车流量,对于不同出发节点和目标节点的车流量,则可用一个OD矩阵表示;另一方面通过API实时提取仿真数据,并在收到控制程序的控制信息之后对Paramics中的车辆实现实时控制,包括车辆速度、换道行为等。控制程序主要完成Paramics危险场景的实现,程序化危险跟驰和危险换道场景,输出并且显示路网车辆状态信息,基于HLA的接口与其他联邦成员进行通信。交通仿真联邦中Paramics和控制程序的接口关系如图4所示。
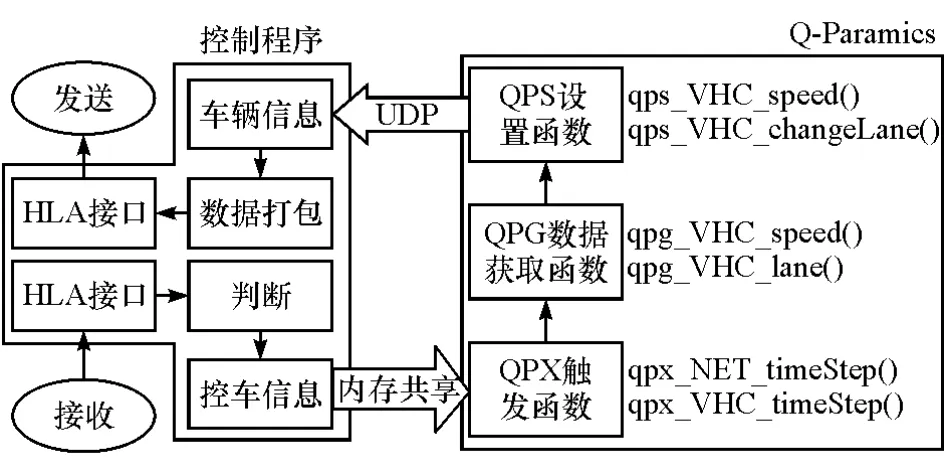
图4 Paramics软件API调用
3 车联网关键环节仿真运行机制
3.1 基于高斯分布的定位误差模型
在行驶过程中,车辆的横向误差会直接影响车载设备对车辆所在车道的正确判断,但目前通过图像处理技术能很好地解决这一问题。因此平台主要分析车辆纵向误差对车辆安全的影响。
车辆的纵向误差对车辆安全影响如图5所示,以车辆行进方向为正方向,车辆实际位置为原点,当某一联网车辆的定位误差为正时,其与前车的实际距离要大于路侧计算出来的距离,可能会发生错误预警的情况;其与后车的实际距离要大于路侧计算出来的距离,可能会发生预警不及时而导致追尾的现象。
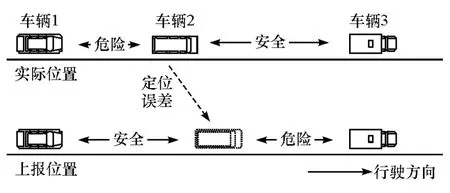
图5 车辆定位误差对车辆安全的影响
定位误差模型很难被精确定义,目前应用较多的定位误差模型为高斯误差模型,本文中采用高斯误差模型模拟车辆的定位误差φ,其分布函数定义为

定位误差分布规律如图6所示[14]。
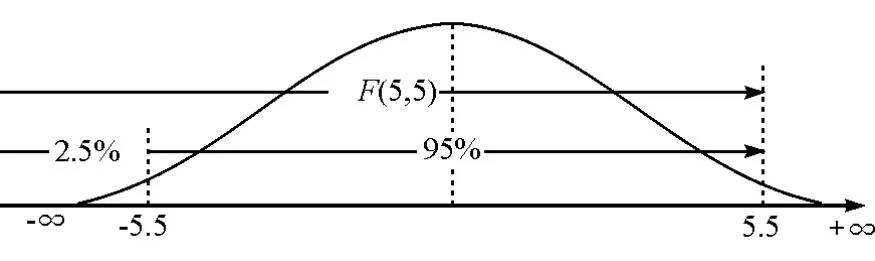
图6 定位误差的高斯分布模型
当F(5.5)=0.975时,能够得到σ=2.8。因此误差分布函数定义如下:


仿真运行中的每一辆车均服从以上的定位误差模型。
3.2 通信延误模拟
车车、车地交互作为车联网系统中车流诱导信息和车辆安全控制信息发布的通道,其性能直接影响交通流诱导效率和安全控制效果。本文中分析了通信延误对车辆安全控制的影响,通信延误模型如图7所示。
定位误差的概率密度函数为

图7 通信延误示意图
车载定位模块无法输出连续的定位信息,一般情况车载定位模块输出定位数据的频率为10Hz,不同车辆定位时刻无法严格同步和定位信息输出的不连续性是造成通信延误的原因之一。在车车或车地通信过程中,数据传输的延误是造成通信延误的另外一个重要原因。针对定位时间不同步所产生的通信延误,采用均匀分布对其进行模拟。此部分通信延误d1的误差分布函数定义为

目前,基于DSRC的车车通信方式被广泛采用,本文中针对通信延误的模拟主要基于单跳传输的DSRC通信协议。本文中对文献[15]中基于OPNET的仿真数据进行处理,通过对仿真数据在置信概率0.05时的概率分布形式进行拟合,发现数据传输延时产生的延误 d2符合 Rayleigh分布,均值为29.98ms。Rayleigh分布的概率密度为

根据Rayleigh分布特性,样本期望值定义为

可以得到σ=23.93,因此得到数据传输延误的分布函数为

概率密度函数为

定位时间不同步产生的延误和数据传输延误之和为总通信延误。
3.3 渗透率模拟
在车联网系统中,在道路行驶的车辆并非全是联网车辆,一般情况为联网车辆和社会车辆混合行驶的模式。因此,引入渗透率的概念:路网中联网车辆与全部车辆的比值。假设联网车辆在路网中随机分布,联网车辆能通过自身的传感器,包括雷达、微波等对周围的车辆状态进行检测,并将检测到的车辆信息一同上报到路侧中心。通过此机制,路侧中心能够获取更多的车辆信息,提高危险辨识率,渗透率对车辆安全的影响如图8所示。
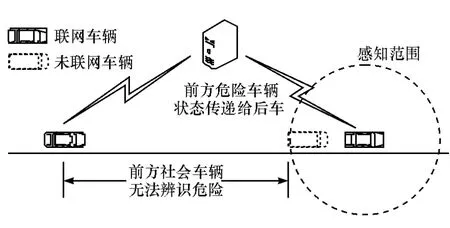
图8 渗透率对车辆安全的影响
4 车辆安全预警方法
本文中基于车辆最小安全距离跟驰模型[16]和车辆非线性分段制动模型[17]分别提出了车辆危险跟驰预警和危险换道预警方法。
4.1 危险跟驰预警
在发生危险跟驰场景时,后车速度要大于前车速度,图9是车辆距离前方交叉口的距离随时间变化的曲线示意图,给出了两对跟驰场景的消解情况。当有预警时车辆1和车辆2的时空曲线无重叠;当无预警时车辆3和车辆4的时空曲线会相交,即会发生追尾事故。

图9 跟驰冲突消解
本文中采用最小安全距离跟驰模型实现对危险跟驰场景的预警。预警模型如下:

式中:vf为后车的车速;vl为前车的车速;am为最大制动减速度阈值,考虑到车辆的最大减速度一般不超过6m/s2,本文中取值为4m/s2;s为两车在执行预警算法时刻的距离;ss为两车的最小安全距离,取值为5m。当上述判断成立时,预警模块即开始预警,生成预警控制信息,当跟驰车辆以高于am的减速度进行制动时,能够避免追尾事故发生。预警控制信息发送给交通控制模块,交通控制模块通过接口模块来控制交通仿真模块改变跟驰车辆的状态,从而避免危险发生。
4.2 危险换道预警
本文中采用车辆分段非线性制动模型对车辆换道危险进行辨识。车辆的制动过程可分为3个阶段:反应阶段、减速度上升阶段和最大减速度阶段,如图10所示。
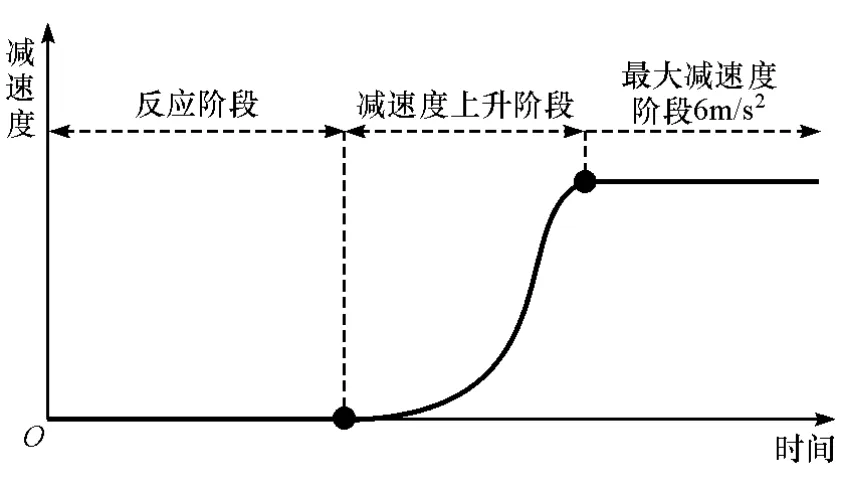
图10 车辆制动过程
反应阶段车辆保持匀速行驶,设置反应时间tr=0.5s,则在初速度为v0条件下在反应时间内行驶的距离sr为

减速度上升阶段,减速度au随时间t的变化规律符合双曲线的变化规律,即

式中:p,q,r为双曲线的参数,p= 6,q= 1833,r=0.16。同跟驰预警,取最大制动减速度阈值为4m/s2,则减速度上升时间内车辆行驶距离su为

最大减速度阶段按照4m/s2制动减速度阈值制动,则此阶段车辆的行驶距离sm为

假设换道车辆一直保持速度vc行驶,若存在t>0使式(15)成立,则进行预警。

5 仿真验证
本文中通过基于HLA的车联网仿真测试平台实现对车辆关键指标参量的仿真测试,仿真平台如图11所示,针对定位误差、通信延误和渗透率3个参数进行了仿真测试。
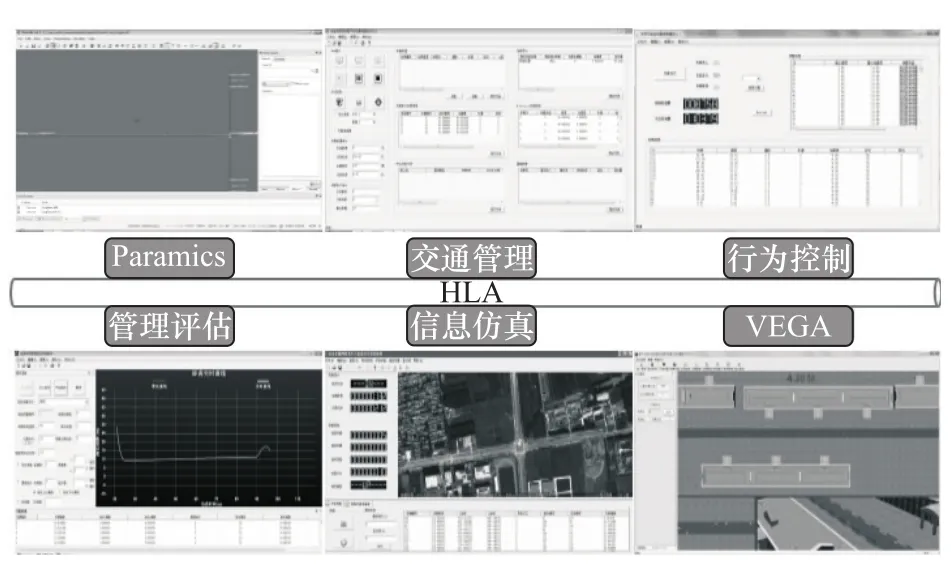
图11 基于HLA的车联网仿真测试平台
5.1 定位误差仿真测试
在定位误差的仿真测试中,场景参数设置如表1所示。

表1 定位误差测试条件
图12为仿真过程中某一次危险跟驰场景中前车和后车的速度变化情况。

图12 跟驰单车曲线
由图12可见,后车在接收到预警信息之后,根据提出的危险跟驰预警方法进行减速,并在车辆接触预警之后,由车辆制动转换为与前车保持跟驰行为。进行100次仿真后,得到两车预警时刻实际车距,如图13所示。
在前后车均具有高斯分布的定位误差时,预警时刻两车的距离出现了一定幅度的波动,这一方面是因仿真的离散性所致,但更主要是因定位误差所致。由图13可见,最小预警距离为后车采用6m/s2减速度时两车应该保持的最小距离,正常预警距离为后车采用4m/s2减速度制动时两车应该保持的最小距离,一般情况下,车辆的制动减速度不会大于6m/s2,因此当制动时两车实际距离小于8.33m时,可视为发生追尾事故。在100次场景的执行中,共发生12次事故,预警成功率为88%,可通过降低预警模型的减速度值来避免事故的发生,但这会降低车流效率。本文中提出的仿真测试方法能为不同定位误差等级条件下的预警参数的选择提供仿真测试建议。
5.2 通信延误仿真测试
在通信延误的仿真测试中,场景参数设置如表2所示。

表2 通信延误测试条件
图14为仿真过程中某一次危险换道场景中换道车辆和后车的轨迹图。
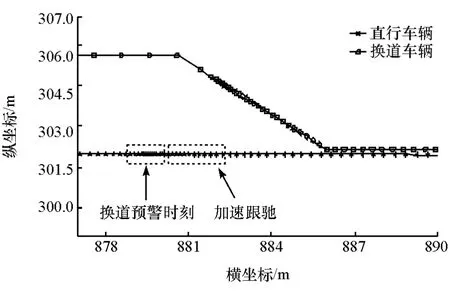
图14 车辆换道轨迹
可以看出,车辆在进行换道时,目标车道上的后车轨迹由稀疏变得密集,在仿真步长一定的条件下,说明后车进行了制动操作;随后解除预警,后车的轨迹又开始逐渐变得稀疏,说明后车进行了加速并与换道的车辆保持跟驰行为。进行了100次仿真之后,仿真结果如图15所示。

图15 通信延误统计结果
由图15可见,采用DSRC作为车车通信方式,通信延误的存在并不会严重影响预警的最终效果,预警成功率达到了100%。车联网系统中,多种通信协议并存,数据的传输方式从单跳到多跳也存在变化,且数据的集中、发布方式也存在区别,系统功能的具体计算单元也会根据系统设计的不同而分布在不同的节点中,本文中提出的仿真测试方法能对不同通信方式的通信延误进行仿真测试。
5.3 渗透率仿真测试
渗透率仿真条件如表3所示。

表3 渗透率测试条件
图16为OD值为1 500时,不同渗透率条件下预警成功次数的统计。
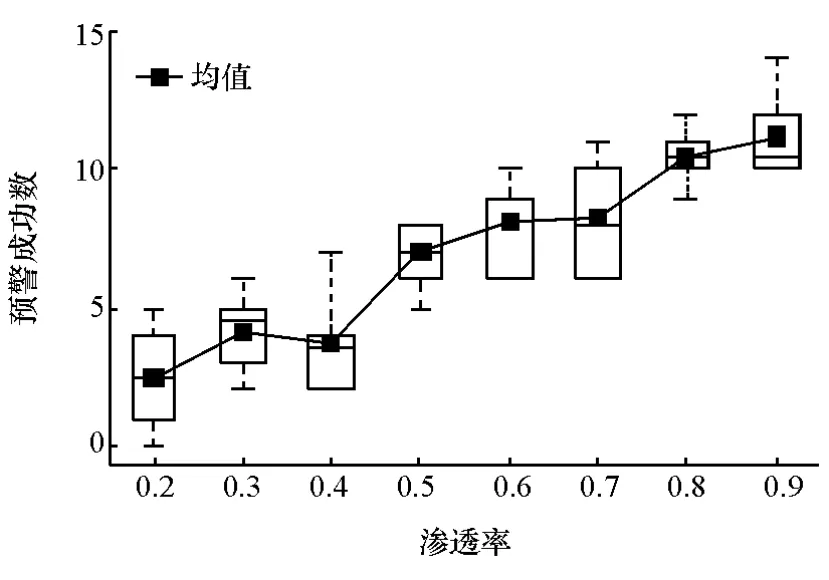
图16 渗透率统计结果
由图16可见,当OD值相同时,路网中联网车辆越多,危险跟驰场景被正确辨识的概率越大。图中当渗透率等于0.4时,识别的均值要小于渗透率等于0.3时候的均值,这是由路网车流的随机性导致。在Paramics中,车辆从小区中生成遵循一定的随机规则,这种车辆生成的随机性导致了图中现象的发生。
图17为OD矩阵变化条件下,渗透率分别为0.2,0.4,0.6和0.8时,进行30次危险跟驰仿真测试的结果。

图17 不同OD时预警成功率
由图17可见,成功预警的次数与OD取值和渗透率均成正相关关系,并在渗透率为0.6,OD取值为4 500时达到100%预警成功率。
6 结论
本文中提出了一种用于分析车联网关键指标对车辆安全影响的仿真测试方法。通过仿真场景生成、关键指标参数注入和车辆危险辨识预警等对车联网中定位误差、通信延误和渗透率进行了仿真验证。结果表明,在危险跟驰场景中,在注入了基于高斯分布的定位误差后,预警成功率为88%,预警成功率随着预警策略中减速度的减小而增大;在危险换道场景中,在注入了采用基于均匀分布和Rayleigh分布的单跳通信延误后,预警成功率达100%;成功预警数随着OD取值和渗透率的增大而增大,且受渗透率影响更加明显。通过本方法能对车联网关键指标进行测试,为实际车联网系统需要达到的性能等级提供参考建议。
今后的主要工作将集中在如下两方面:研究车联网系统中关键参数变化机理,比如定位误差在遮挡环境中的误差特性和多径效应中通信延误变化特性;精确刻画车辆的运行过程,进一步优化跟驰和换道预警方法。
[1] HUANG J M,YARLAGADDA P,KIM Y H.Research on internet of vehicles and its application in intelligent transportation[C].Mechatronics and Industrial Informatics, PTS 1-4.Switzerland:TransTech Publications LTD,2013:2818-2821.
[2] GRUYER D,BELAROUSSI R,REVILLOUD M.Accurate lateral positioning from map data and road marking detection[J].Expert Systems with Applications,2016(43):1-8.
[3] MUN C,CHOI J,KIM Y,et al.Cell planning and deployment for IEEE 802.11p/WAVE network[J].IEEE Intelligent Transportation Systems Magazine,2015,7(4):49-57.
[4] 李家文,曹建东,成波.基于危险感知机理的状态适应式碰撞预警策略研究[J].汽车工程,2016,38(4):329-434.
[5] 邱斌斌,朱绍鹏,马浩军,等.电动车辆驱动控制系统仿真测试平台设计[J].浙江大学学报(工学版),2015,49(6):1154-1159.
[6] SUNNEVANG C,PIPKORN B,BOSTROM O.Assessment of bilateral thoracic loading on the near-side occupant due to occupantto-occupant interaction in vehicle crash tests[J].Traffic Injury Prevention,2015,162(SI):217-223.
[7] ZHAO Y J, HOU Y F, WAGH A, et al.A partial reality experimental system for human-in-the-loop testing of connected and automated vehicle applications: development, validation and applications[C].2nd Annual Workshop on Road Vehicle Automation,2014:185-196.
[8] WU Z Z, YANG J, HUANG L Y.Study on the collision avoidance strategy at un-signalized intersection based on PreScan simulation[J].Procedia-Social and Behavioral Sciences,2013,2013(96):1315-1321.
[9] WON H D, AHN J, LEE E, et al.GNSS carrier phase anomaly detection and validation for precise land vehicle positioning[J].IEEE Transactions on Instrumentation and Measurement,2015,64(9):2389-2398.
[10] CABANERO A J, CHRISTOFA E, SKABARDONISA.Connected vehicle penetration rate for estimation of arterial measures of effectiveness[J].Transportation Research: Part C,2015(60):298-312.
[11] 范林军,凌云翔,王涛,等.分布仿真系统HLA联邦快速开发包的设计与实现[J].高技术通讯,2013,23(6):623-630.
[12] RATROUT T N, RAHMAN M S, REZA I.Calibration of PARAMICS model:application of artificial intelligence-based approach[J].Arabian Journal for Science and Engineering,2015,40(12):3459-3468.
[13] ESSA M,SAVED T.A comparison between PARAMICS and VISSIM in estimating automated field-measured traffic conflicts at signalized intersections[J].Journal of Advanced Transportation,2016,50(5):897-917.
[14] YANG L,YANG J H,FERON E,et al.Development of a performance-based approach for a rear-end collision warning and avoidance system for automobiles[C].Proceedings of IEEE IV2003: Intelligent Vehicles Symposium,2003:316-321.
[15] XIANG X H,QIN W H,XIANG B F.Research on a DSRC-based rear-end collision warning model[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(3):1054-1065.
[16] 袁伟,付锐,马勇,等.基于高速实车驾驶数据的驾驶人跟车模型研究[J].汽车工程,2015,37(6):679-685.
[17] 杨军,张伟光,陈先华.减速度非线性变化对制动距离影响分析[J].东南大学学报(自然科学版),2011,1(4):848-853.
A Simulation Scheme for Testing the Effects of Key Indicators of the Internet of Vehicles on Vehicle Safety
Chai Linguo1, Cai Baigen1,2,3, Wang Huashen1,2, Shangguan Wei1,2,3& Wang Jian1,2,3
1.School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing 100044;2.Beijing Jiaotong University,State Key Laboratory of Rail Traffic Control and Safety, Beijing 100044;3.Beijing Engineering Research Center of EMC and GNSSTechnology for Rail Transportation, Beijing Jiaotong University, Beijing 100044
A simulation testing scheme for analyzing the effects of the key indicators of the internet of vehicles(IOV)on vehicle safety is proposed.Firstly the basic simulation scenarios of dangerous vehicle following and lane change are devised based on microscopic traffic flow simulation software.Secondly,Gaussian distribution-based vehicle positioning error model and single-hop communication delay model are analyzed,and the executed strategies of positioning error,communication delay and penetration ratio during simulation are determined.Then the ways of warnings for dangerous vehicle following and lane change are proposed based on minimum safety distance model and vehicle nonlinear piecewise braking model respectively.Finally,a high level architecture-based IOV simulation platform is setup and a simulation is conducted for testing the effects of poisoning error,communication delay and penetration ratio on vehicle safety.The results show that in dangerous vehicle following scenario,the success rate of warning increases with the lowering of vehicle deceleration in warning strategy and the bringing-in of Gaussian distribution-based vehicle positioning error can get a warning success rate of 88%,while in dangerous lane change scenario, the success rate of warning increases with the rises of origin-destination value and penetration ratio, in which the latter has more obvious effects,and the bringing-in of single-hop communication delay can achieve a warning success rate of 100%.
traffic engineering; vehicle safety; simulation testing; internet of vehicles; simulation scenarios
10.19562/j.chinasae.qcgc.2017.11.015
∗中央高校基本科研业务费(2016YJS035)、国家重点研发计划项目(2016YFB1200100)、国家自然科学基金重大项目(61490705)、国家自然科学基金面上项目(61773049)和北京市自然基金面上项目(4172049)资助。
原稿收到日期为2016年6月22日,修改稿收到日期为2017年1月7日。
上官伟,教授,E-mail:wshg@ bjtu.edu.cn。