基于驾驶行为的追尾避撞控制策略研究∗
2017-10-12刘志强张春雷张爱红朱伟达
刘志强,张春雷,张爱红,倪 捷,朱伟达
基于驾驶行为的追尾避撞控制策略研究∗
刘志强1,张春雷1,张爱红2,倪 捷1,朱伟达1
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.公安部交通管理科学研究所,无锡 214151)
本文中提出了一种通过制动或换道来实现的追尾避撞控制策略。首先通过模拟驾驶仪采集驾驶员避免追尾碰撞的换道时机、制动强度、最大加速度变化率和反应时间,构建了驾驶员制动避撞行为和换道避撞行为模型;然后建立基于制动安全距离、碰撞时间和换道安全距离的危险估计模型,实时计算行车发生追尾碰撞的危险等级并据此选取相应的主动避撞介入时机和方式;最后依据碰撞时间和结合前馈控制的线性状态反馈控制方法,分别建立制动避撞策略和换道避撞策略。Matlab仿真和实车试验验证结果表明,该避撞控制策略能通过自主换道或制动避免中低速跟车行驶时的追尾碰撞。
追尾避撞;模拟驾驶仪;驾驶员避撞行为;避撞控制策略;自主换道或制动
Keywords:rear-end collisions; driving simulator; drivers'collision avoidance behavior; collision avoidance control strategy;autonomous lane change or braking
前言
车-车碰撞可分为正面碰撞、侧向碰撞和追尾碰撞,其中追尾碰撞所占比例最大,2012年全国高速公路事故中追尾碰撞占32%__[1]。为减少追尾碰撞事故的发生,国内外学者提出了基于制动过程运动学分析的安全距离模型[2]、基于车头时距安全距离模型[3-4],这些模型均未考虑驾驶员因素,不能反映驾驶员避撞特性,因此接受度不高。
近年来对驾驶员避撞特性的研究越来越多___[5-7],但这些研究仅对驾驶员制动特性进行分析,未考虑驾驶员正常避撞策略的选择。问卷调查结果(图1)表明,在驾驶员感知到有追尾危险时超过60%的驾驶员第一选择是采取换道避撞策略,所以目前基于驾驶员制动避撞特性的研究不能充分反映驾驶员的避撞行为,未来主动避撞技术将通过模拟驾驶员避撞行为选择自主制动或换道来帮助驾驶员实现主动避撞[8-9]。
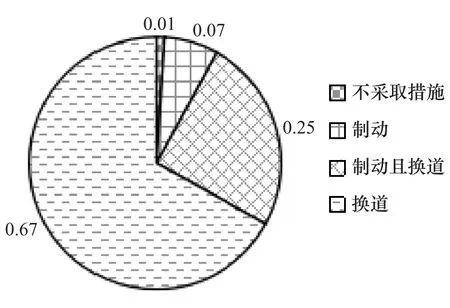
图1 驾驶员避免追尾碰撞采取的措施
主动避撞系统介入时机和方式应根据具体交通场景的危险评估和驾驶员避撞行为特性来决定。主动避撞系统首先通过车载传感器动态检测行车环境,当检测到危险目标时判断当前行车安全状态,若有潜在追尾危险则对驾驶员报警,若驾驶员未采取任何避撞措施,系统将根据危险等级和行车环境采取类似驾驶员避撞行为的换道或紧急制动策略。
根据传感器检测到的环境信息和自车的行驶状态信息对自车当前行驶安全状态做出评估是主动避撞系统的基础,环境状态感知已有学者做出详细描述[10],本文中通过模拟驾驶仪分析驾驶员在紧急状态下采取避撞的行为特性,运用基于驾驶员避撞行为特性的新型危险评估算法实时评估行车安全状态,在保证车内乘客的最大舒适度的同时根据不同的危险等级采取报警、制动和换道避撞策略。
1 驾驶员避撞行为分析
驾驶员感知到有追尾碰撞危险时采取的避撞策略有换道、制动、换道加制动,对驾驶员在危险状态下采取换道和制动两种最常见的避撞方式进行分析,在换道过程中假设车辆纵向车速保持不变。为分析系统介入时间,通过模拟驾驶仪(图2)对100名经验丰富的驾驶员避撞行为特性进行实验分析,实验场景设置为自车在单向三车道的中间车道上正常行驶,前方有同向行驶车辆且在某一任意时刻做出制动操作。

图2 模拟驾驶仪实现驾驶场景
首先考虑驾驶员换道避撞行为特性,实验时假设自车的左右车道无障碍物即允许换道,实验测得在自车与前车相对速度分别为 0,20,40,60和120km/h时,驾驶员采取换道避撞的时间和两车相对距离,并得出驾驶员认为安全、存在危险和危险3个区域(图3),图中直线表示车辆保持当前运行状态发生碰撞的时间。

图3 换道避撞操作时机
现有研究中多以制动加速度表示驾驶员制动避撞行为,本文中增加制动加速度变化率j这一参数建立考虑驾驶员能接受的最大加速度变化率的制动安全车距模型,加速度与时间的关系见图4,tj(t)为从当前加速度到以最大制动减速度制动避撞的时间,其表达式为

式中:a0(t)为当前加速度;amin和jmin分别为最小加速度和最小加速度变化率,通过实验分析保证驾驶员和车内乘客舒适度的极限值为amin=-0.6g,jmin=-10m/s3。则制动安全距离为
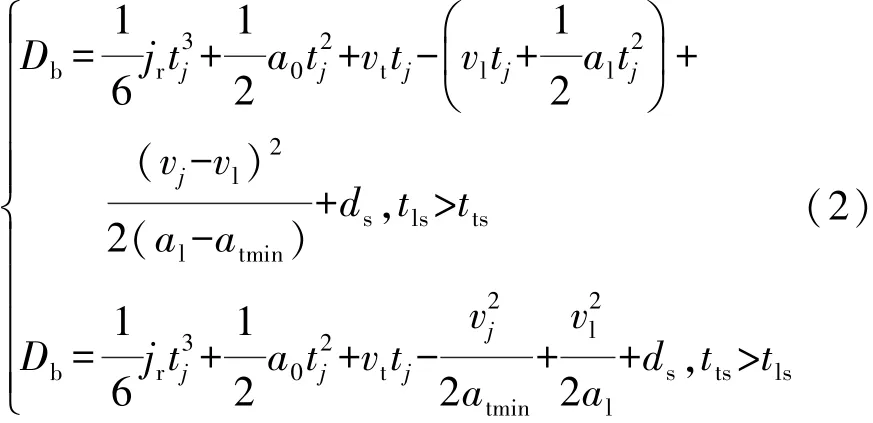
其中

式中:jr为相对加速度;vt为自车速度;vl为前车速度;al为前车加速度;atmin为自车最小加速度;ds为最小停车安全车距;tls为前车减速至停车所需时间;tts为自车减速至停车所需时间。

图4 加速度与时间的关系
分析驾驶员换道和制动避撞行为需考虑的另一参数为驾驶员反应时间,即系统需为驾驶员得到报警信号后预留时间来判断危险并作出避撞操作。在模拟驾驶仪中设置跟车实验场景,在经过一定时间跟车后,前车会突然制动,且自车在碰撞前3s发出报警,驾驶员从听到报警声音到采取制动的时间分布如图5所示。
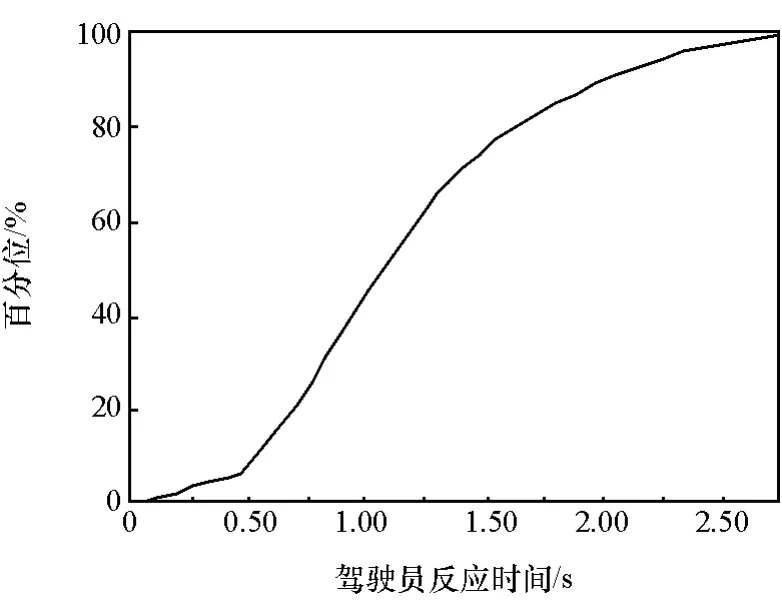
图5 驾驶员反应时间分布
由图5可知,报警声发出1.25s已有超过60%的驾驶员采取制动避撞措施。主动避撞系统的报警及制动时机的选择必须符合驾驶员避撞习惯,这样才能不干扰驾驶员正常驾驶而被其接受。触发主动报警系统的典型参数是碰撞时间(TTC)[11-12]。本文中以碰撞时间和ACC系统使用的车间时距(TG)[13]两个参数共同决定主动报警及制动干预时机。
为确定执行换道避撞策略所需参数的值,建立如图6所示的S型换道轨迹模型,车辆换道轨迹由换道时间为TB,2TB和10TB时车辆位置确定,10TB时车辆位置即为期望换道完成位置,其中TB为常量,TB=100ms,3个点被放在一起以矩阵形式传输到控制器:


图6 追尾避撞模型
以自车纵向车速方向为x轴、x轴逆时针旋转90°为y轴建立直角坐标系,则车辆在S型换道轨迹模型中的位置为偏航角ψ为(假定无侧滑)

ψ=arctan(d y/d x) (4)
其对时间的导数为

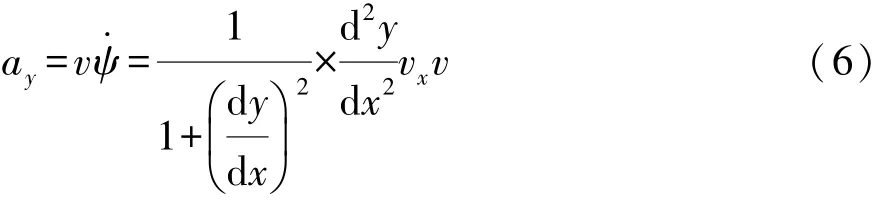
根据阿克曼原理可得车辆横向加速度为
车辆S型轨迹为

式中:yM为车辆换道所需的横向位移;a为轨迹曲线在x=c处的斜率;(c,yM/2)为曲线的拐点;c为车辆完成换道纵向位移s的一半。
换道安全距离Ds为

2 避撞策略
原则上系统执行的避撞策略要尽可能在不干预驾驶员操作的情况下按照危险等级执行相应的主动干预以实现避免追尾碰撞。系统根据目标车辆和自车行驶状态信息的处理判断出自车当前是否有追尾碰撞的危险,当存在追尾危险时选择主动避撞方式和介入时间。
2.1 危险估计模型
主动避撞方式有制动、换道、制动加换道组合,本文中不考虑第3种策略。
驾驶员正常行车过程中有以下4种模式:
(1)D>Ds且 D>Db,行车安全;
(2)D>Ds且D≤Db,系统判断道路条件允许换道则执行换道避撞策略,若不允许换道则执行制动避撞策略;
(3)D≤Ds且 D>Db,行车安全;
(4)D≤Ds且D≤Db,系统选择制动避撞策略。在执行制动避撞控制时根据驾驶员避撞特性划分3个危险等级。
TTC定义为

TG定义为

式中:D为两车的实时相对车距;vl和vt分别为前车和自车车速。
由式(9)可知,在两车相对速度较小时TTC的值将会很大,无法准确判断当前车辆危险等级,引入TG作为TTC的补充可以很好地解决这一问题。
根据驾驶员采取换道避撞时机(图3)和反应时间(图5),设置系统初级报警时间为TTC1=3.00s,二级报警TTC2=2.25s,此时不仅有声音报警系统还增加轻微制动,通过多次实验该制动强度为0.1g~0.2g最为合适,既能够加强报警效果也不干预驾驶员正常驾驶。紧急制动时间设置为TTC3=1.00s,此时驾驶员可能会有意识地转动转向盘,考虑到车辆稳定性在多种条件下多次实验得出最大制动强度为0.6g。另一方面为避免驾驶员误操作,此时锁死制动踏板。在 TTC>TTC1时,TG作为主动介入依据[14],相对应 TG1=2.10s,TG2=1.50s,TG3=1.10s。
2.2 控制逻辑
系统进入制动避撞控制策略后首先判断TTC与TTC1的关系,若TTC>TTC1则进入算法二(图7(b)),否则进入算法一(图7(a))。算法一中TTC≤TTC1,在TTC>TTC2时,若驾驶员采取措施避免追尾碰撞,则返回信息检测实时计算相关参数判断危险等级,若驾驶员未采取措施,系统初级报警提示驾驶员当前行车状态有追尾碰撞的危险;在TTC3<TTC≤TTC2时,若驾驶员采取措施避免追尾碰撞,则返回信息检测实时计算相关参数判断危险等级,若驾驶员未采取措施系统二级报警提示驾驶员当前行车状态有较大可能发生追尾碰撞;TTC≤TTC3时,驾驶员已无法避免追尾碰撞,系统采取紧急制动策略,在两车相对速度较小时TTC无法判断行车危险等级,算法二用车间时距TG代替TTC对行车状态实时判断。

图7 追尾避撞控制算法
在换道避撞过程中系统存在干扰和偏差,为此设计了一个结合前馈控制的反馈控制器,如图8所示。通过车辆速度v、轴距l和期望轨迹曲率k可计算出基于自身转向梯度USG的转角δFF为


图8 线性反馈控制与前馈控制相结合的结构
使用车辆的偏航角ψ和纵向位置xE控制偏差进行坐标变换定义e=Δy。期望转角δM为前馈和反馈控制得到的δFB与δFF之和。所建立的制动和换道相结合的追尾避撞控制系统结构如图9所示。

图9 追尾避撞控制系统结构
3 实验验证
采用德国汽车俱乐部(ADAC)有效性测试方法[15]对前车静止、匀速、紧急制动3种典型工况进行实验,这里仅对最危险的前车紧急制动工况详细说明。设置交通场景为跟车行驶过程中自车道前方突然发生追尾碰撞交通事故,系统根据对相邻车道环境检测判断换道条件决定主动避撞策略方案。
实验车辆为装配了毫米波雷达、速度传感器、转向盘转角传感器、偏航率传感器、ECU、报警、主动前轮转向和自动制动装置的凯越轿车。
3.1 换道避撞策略
通过附加传感器确定相邻车道允许换道时(图10),系统根据驾驶员反应时间、安全车距计算决定换道时机和轨迹以避免追尾碰撞,自车换道过程按照系统计算的路径行驶,无需驾驶员操作。

图10 换道避撞策略
结合前馈控制的线性反馈控制换道避撞策略的实车实验中换道横向位移yM设置为3m,在实验第5s时开始换道,经过1s换道完成,随后驾驶员返回原车道,在该车道内行驶2s后制动停车,结果如图11所示。由图11(d)可知,实验测得的实际横向位移与Matlab仿真得到的期望横向位移吻合较好,仅有少许误差。图11(c)中期望值为控制器输出值,实验测得转角度数表明驾驶员未采取换道措施,换道由系统自主完成,实验中横向最大加速度为|ay|≈7m/s2。
3.2 制动避撞策略
通过附加传感器确定相邻车道不允许换道时,系统采取制动避撞策略(图12)。根据图5驾驶员反应时间分布,设定驾驶员感受到二级报警再到系统紧急制动时间为1.25s,确保超过60%的驾驶员可以主动避免追尾碰撞,系统紧急制动的最大制动减速度为0.6g。
实车验证系统避免追尾碰撞效果时以静止的海绵块(2m×0.6m×1.6m)替代前方车辆。实验时驾驶员在感受到二级报警后1.25s内采取避撞措施,实验结果如图13所示。
由图可知,车辆在中低速行驶时该系统可有效实现避免追尾碰撞,在高速区时可将碰撞速度大大降低。
4 结论
在车辆同向行驶过程中驾驶员未能及时判断自车与前车存在追尾碰撞危险并作出避撞操作时,设计的避撞控制策略在不妨碍驾驶员正常操作的同时能实现以下功能:
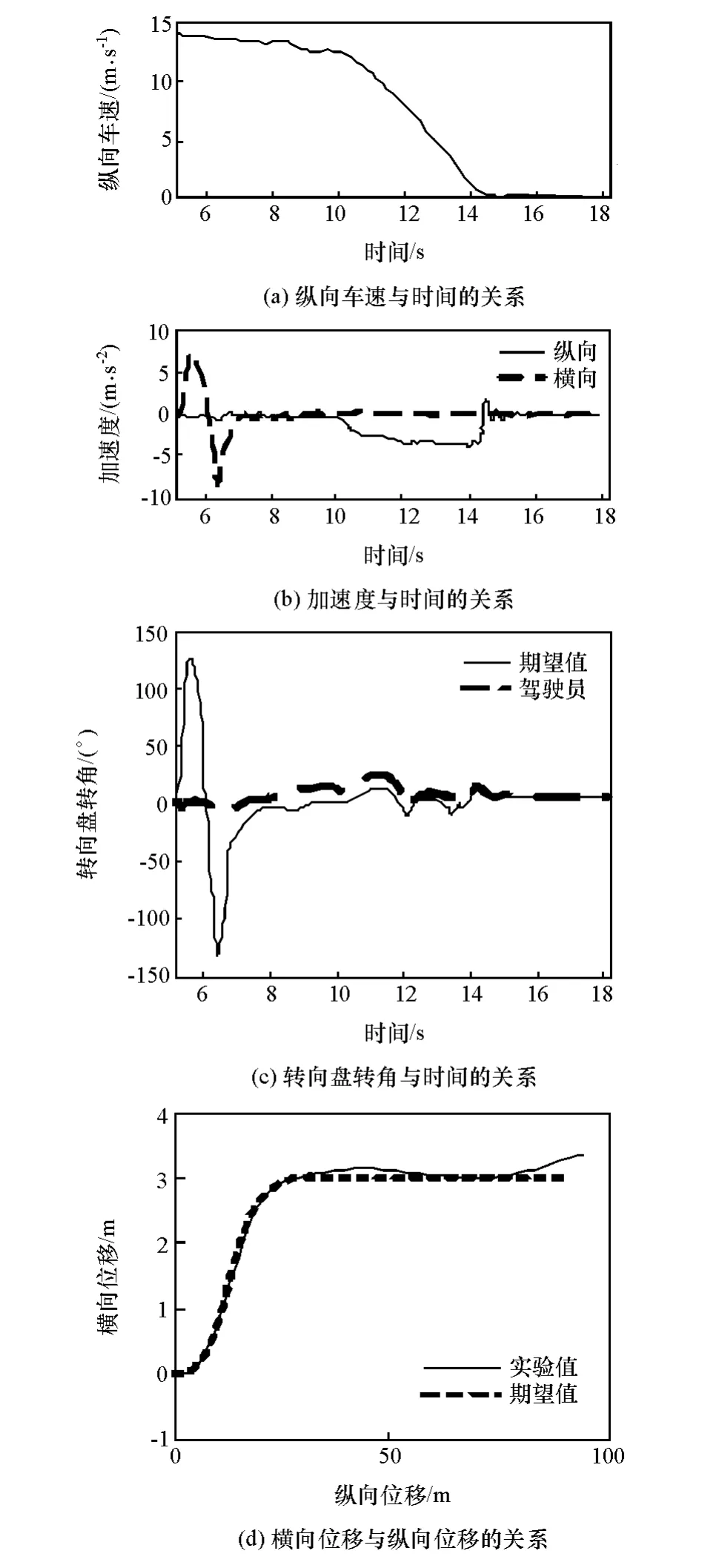
图11 与前馈控制相结合的线性反馈控制的换道测试结果

图12 制动避撞策略
(1)制动避撞策略可实现有效避免中低速(≤50km/h)跟车行驶时追尾碰撞危险,能帮助驾驶员避免城市交通常见的低速行驶时的追尾事故;
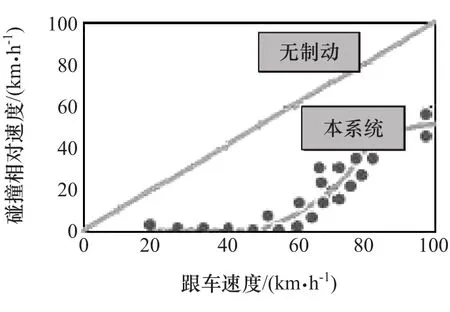
图13 制动策略避撞效果
(2)三级制动避撞控制策略充分考虑驾驶员避撞特性,为驾驶员提供2s的自主避撞时间;
(3)换道避撞策略可在1s内自主完成换道操作,满足最危险的驾驶员对换道时机的要求。
[1] 郭景全.我国高速公路交通事故现状及特点分析[J].黑龙江交通科技,2015(3):184.
[2] 侯德藻,李克强.汽车主动避撞系统中的报警方法及其关键技术[J].汽车工程,2002,24(5):438-441.
[3] KADE A.Automatic time headway setting for adaptive cruise control system:US,US7966118[P].2011.
[4] AYREST J, LI L, SCHLEUNING D, et al.Preferred time-headway of highway drivers[C].Intelligent Transportation Systems,2001.Proceedings.2001 IEEE.IEEE,2001:826-829.
[5] 高振海,管欣,李谦,等.驾驶员最优预瞄纵向加速度模型[J].汽车工程,2002,24(5):434-437.
[6] MCLAUGHLIN SB,HANKEY J M,DINGUST A.A method for evaluating collision avoidance systems using naturalistic driving data[J].Accident Analysis & Prevention,2008,40(1):8-16.
[7] Takada, Shota Hiraoka, Toshihiro Kawakami, et al.Effect of forward obstacles collision warning system based on deceleration for collision avoidance on driving behavior[J].Jsae Transactions,2012,43:619-625.
[8] BRÄNNSTRÖM M, COELINGH E, SJÖBERG J.Model-based threat assessment for avoiding arbitrary vehicle collisions[J].Intelligent Transportation Systems, IEEE Transactions on,2010, 11(3):658-669.
[9] EIDEHALL A,POHL J,GUSTAFASSON F,et al.Toward autonomous collision avoidance by steering[J].Intelligent Transportation Systems, IEEE Transactions on,2007,8(1):84-94.
[10] DARMS M, WINNER H.Umfelderfassung für ein fahrerassistenzsystem zur unfallvermeidung[J].VDI BERICHTE,2006,1931:207.
[11] GÖRMER S,MÜLLER D,Hold S,et al.Vehicle recognition and TTC estimation at night based on spotlight pairing[C].Intelligent Transportation Systems,2009.ITSC'09.12th International IEEE Conference on.IEEE,2009:1-6.
[12] ANDERSON D M,AKDENIZ A,BANKS D L,et al.Radar based ground vehicle collision prevention:U.S.7,579,980[P].2009-08-25.
[13] NARANJO J E, GONZÁLEZ C, GARCÍA R, et al.Cooperative throttle and brake fuzzy control for ACC+Stop&Go maneuvers[J].Vehicular Technology, IEEE Transactions on,2007,56(4):1623-1630.
[14] LIN T W,HWANG S L,GREEN P A.Effects of time-gap settings of adaptive cruise control(ACC)on driving performance and subjective acceptance in a bus driving simulator[J].Safety Science,2009,47(5):620-625.
[15] ERIKSSON H, JACOBSON J, HÉRARD J, et al.On the design of performance testing methods for active safety systems[M].Springer Berlin Heidelberg,2012.
A Study on the Control Strategy for Rear-end Collision Avoidance Based on Drivers'Behavior
Liu Zhiqiang1, Zhang Chunlei1, Zhang Aihong2, Ni Jie1& Zhu Weida1
1.School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013;2.Traffic Management Research Institute of the Ministry of Public Security,Wuxi 214151
A control strategy for rear-end collision avoidance by braking or lane change is proposed in this paper.Firstly the model for drivers'collision avoidance behavior by braking or lane change is established based on the timing of lane change, braking strength, the maximum jerk and reaction time for driver to avoid rear end collision collected by driving simulator.Then a risk assessment model is built based on the safety distance in braking or lane change and time to collision,and the risk level of rear-end collision occurrence in driving is calculated real time,based on which the corresponding timing and way of active collision avoidance intervention are selected.Finally the collision avoidance strategies by braking or lane change are set up respectively according to the time to collision and the method of combined linear state feedforward-feedback control.The results of Matlab simulation and real vehicle test show that the collision avoidance control strategy proposed can avoid rear-end collision in medium/low speed vehicle following driving by autonomous lane change or braking.
10.19562/j.chinasae.qcgc.2017.09.014
∗国家自然科学基金(61403172)和道路交通安全公安部重点实验室(2016ZDSYSKFKT09)资助。
原稿收到日期为2016年10月25日,修改稿收到日期为2016年12月1日。
刘志强,教授,博士,E-mail:Zhqliu@ujs.edu.cn。
