基于反馈控制的人体颈部肌肉主动力建模∗
2017-10-12黄晶,谭瞻,胡林
黄 晶,谭 瞻,胡 林
基于反馈控制的人体颈部肌肉主动力建模∗
黄 晶1,谭 瞻1,胡 林2,3
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 2.长沙理工大学汽车与机械工程学院,长沙 410114;3.长沙理工大学,工程车辆安全性设计与可靠性技术湖南省重点实验室,长沙 410114)
鉴于用于汽车交通事故仿真研究的人体有限元模型中肌肉主动力的缺失,制约着人体损伤机理的全面认知,建立肌肉主动力数学模型,获得生物逼真度高的仿真结果,以评估主动安全系统的功效,具有重要意义。本文中基于人体头颈部有限元模型,采用LS-DYNA关键字编写反馈控制程序,对颈部肌肉实现肌肉主动力控制,在有限元模型中实现肌肉主动力模拟,并与基准模型和志愿者碰撞试验进行对比分析,结果表明,添加了肌肉主动力反馈控制的头颈部有限元模型的动力学仿真结果更贴近乘员的真实响应,肌肉主动力在提高有限元人体模型生物逼真度方面具有重要作用。
肌肉主动力;反馈控制;有限元分析;头颈部有限元模型;LS-DYNA关键字
Keywords:active muscle force; feedback control; FEA; head-neck FE model; LS-DYNA keywords
前言
近年来对高速碰撞事故中乘员损伤机理和损伤防护措施的研究,使在交通事故中死亡的人数得到稳定减少[1],但对于碰撞事故中乘员挥鞭伤损伤机理的研究还需要进行大量的工作。低速碰撞乘员损伤虽然不致命,但会带来长期性的痛苦甚至致残,因此低速碰撞机理越来越受到研究人员的重视。有研究表明,低速碰撞中乘员所受载荷不仅来自于汽车碰撞中的外部载荷,还包括人体肌肉在碰撞过程中产生的力[2],即在低速碰撞环境下,驾乘人员由于视觉或触觉引发条件反射,使肌肉紧张产生主动力,影响其运动稳定性和损伤情况。此外,随着主动安全系统的广泛应用,汽车安全系统呈现主、被动安全相结合的趋势,而主动安全系统最大的优势在于事故发生前就已经开始工作,强烈影响着驾乘人员的思维和行为。有实验表明,汽车碰撞事故中,在头部开始运动之前,颈部肌电图就已经出现信号,且在加速度的作用下,肌电图信号明显增加,肌肉发生强烈收缩,即碰撞发生过程中的载荷施加过程及载荷等级所引起的肌肉主动反应强烈影响驾乘人员的运动学响应[3]。
目前大多数肌肉主动力建模主要采用预先定义激活等级曲线的方法,即通过在模型中定义固定的激活等级曲线来设定肌肉的激活程度,以模拟神经系统对肌肉的刺激。文献[4]和文献[5]中基于这种方法建立了多刚体颈部模型;文献[6]中通过对肌肉状态进行评估,利用最优化方法设定激活等级,并将该模型用于肌肉主动力对颈部拉伸载荷影响的研究。文献[7]和文献[8]中建立了人体颈部肌肉的三维模型,并根据仿真给定的边界条件定义激活等级曲线。通过以上方法建立的肌肉主动力模型无法模拟肌肉的条件反射响应,即不能产生与碰撞事故发生时的汽车加速度和安全带预紧等因素相匹配的肌肉响应。
文献[9]中在已有的人体有限元模型中,利用Fortran语言在有限元平台开发了基于传统PID的反馈控制回路,控制人体上肢肌肉的主动收缩,研究碰撞中乘员上肢的动力学响应,首次在有限元平台中开发了肌肉主动力控制程序。文献[10]中研究了自主制动过程中志愿者乘员头颈部的动力学响应以及颈部肌肉在有意识状态下的预张力,并在有限元平台中开发了前馈控制系统,控制肌肉的预张力,在乘员自主制动的仿真中对控制回路的有效性进行验证。
将经典控制理论应用于肌肉主动收缩的控制已成为肌肉主动力研究的新方向。本文中在头颈部有限元模型的基础上,基于PID反馈控制建立了肌肉主动控制模型,不仅可实现肌肉主动控制功能,还使控制模型具有随研究对象的变化而调整的适应性。前、后志愿者碰撞实验验证结果表明:反馈控制模型在人体模型中的应用使仿真结果更加真实可靠,控制模型与肌肉力学模型有机结合,进一步提高头颈部有限元模型的生物逼真度。
1 头颈部有限元模型
所使用的头颈部有限元模型如图1所示,该模型在头颈部基础模型的基础上完成颈部肌肉重建,使肌肉模型具有主、被动响应特性。

图1 人体头颈部有限元模型
1.1 基础模型
基础头颈部有限元模型由湖南大学开发,根据人体解剖学结构,对脑、颅骨、椎间盘、颈椎、肌肉、韧带、小关节和相关的软骨组织等进行了建模[11]。根据颈部肌肉的解剖结构,其连接点分布在胸骨、肋骨和胸椎,为保持颈部肌肉下端与骨骼的正确连接关系,在基础模型中保留了胸腔的骨骼部分。椎骨具有高硬度,在人体运动中变形量很小,定义为刚体材料以降低计算量;椎间盘具有高柔性,模型中被定义为线弹性材料;韧带只受拉应力,通过非线性弹簧进行模拟;肌肉采用Hughes-Liu梁单元模拟,其材料属性定义为黏弹性材料,只具有被动响应特性。
1.2 肌肉模型重建
通过MRI影像资料获得人体骨骼肌的三维几何模型,并根据人体解剖学结构中肌肉的起止端,将肌肉与骨骼模型进行匹配[12]。根据Hill肌肉本构模型(图2),对颈部肌肉模型进行了重建。
Hill肌肉模型由非线性收缩元(CE)、线弹性元(SE)和弹性元(PE)3部分组成。CE代表肌小节的收缩属性,PE代表肌肉纤维和周围组织的被动属性,SE则代表肌腱的弹性属性。每条肌肉的有限元模型由3部分组成,分别模拟CE,SE和PE。其中PE采用三维实体单元,超弹性Ogden橡胶材料模型(∗MAT_OGDEN_RUBBER)定义了肌肉高度非线性黏弹性的被动力属性;CE采用一维梁单元,Hill肌肉材料模型(∗MAT_MUSCLE)定义了肌肉的主动力属性,三维实体单元与一维梁单元以共节点的方式并联,实现肌肉主动力和被动力的耦合。SE在肌肉模型中承担主动力和被动力的共同作用,其解剖学结构较小,在肌肉响应中变形量较小,建模时对其进行了简化,以梁单元的方式连接。肌肉力的计算公式为

每条肌肉的主动力FCE均可按以下公式计算:

式中:σce为单条肌肉主动应力;Apcsa为肌肉的生理横截面积;A(t)为肌肉激活等级;fl(l)和fv(v)分别为肌肉力-肌肉长度型函数和肌肉力-收缩速度型函数;σmax为最大收缩应力。
在 Hill肌肉材料模型中需对 σmax,Apcsa,fl(l),fv(v)进行定义,此外还需对肌肉的最大主动收缩力FCEmax和最大收缩速度vmax等参数进行定义,颈部肌肉的生物力学参数参考已发表的研究成果[13-14],如表1所示,单条肌肉中的主动响应是由多个并行的Hill梁单元共同承担,FCEmax平均分配至每个Hill梁单元上。肌肉激活等级A(t)与碰撞事故发生时的状况有关,本文中利用控制理论获取。

表1 颈部肌肉参数
2 肌肉控制模型及其实现
已有的肌肉主动力建模通常通过预先设定固定的激活等级曲线来实现。通过这种方法建立的肌肉主动力模型不能产生与实际碰撞事故发生时的汽车加速度、安全带预紧等因素相匹配的肌肉响应。在Hill肌肉模型的基础上引入PID反馈闭环控制技术,将控制技术与肌肉力学模型有机结合,实现神经系统对肌肉主动作用的模拟,并可通过PID参数的变化使肌肉模型具有随研究对象的变化而调整的特性。
2.1 肌肉主动力控制模型
根据骨骼肌神经肌肉控制生物力学以及肌肉本构模型和生物材料属性,建立基于反馈控制的肌肉主动力控制模型。控制模型为闭环控制回路,由PID模块、激活等级整定模块、Hill肌肉单元、头颈部模型和神经延迟等模块组成,如图3所示。通过PID反馈闭环控制技术获得与碰撞时刻实际情况相适应的肌肉激活等级A(t)。
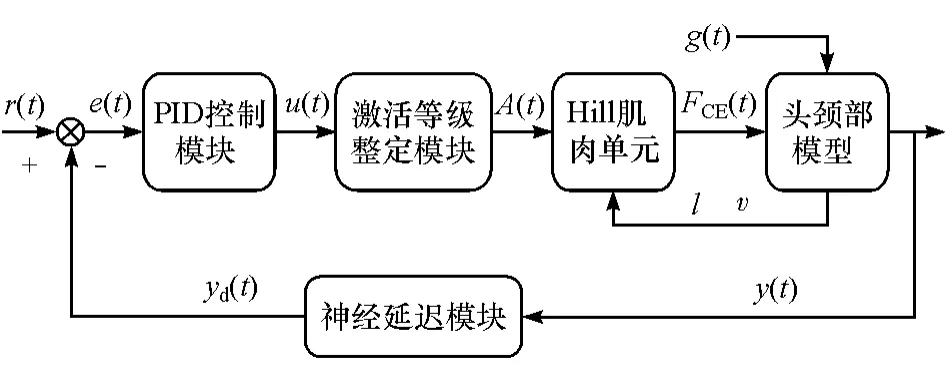
图3 基于PID反馈控制模型
肌肉的主动作用反映在预碰撞中的姿势维持以及紧急情况下的条件反射,本文中正是依据这一思路来进行肌肉激活等级A(t)的调整。人体姿势的保持和改变主要通过关节角的变化来实现,见图3,颈部实时弯曲角度为输出y(t),并经神经延迟后作为反馈信号yd(t)参与颈部运动的调节;g(t)为头颈部有限元模型碰撞仿真的运动输入,通常为碰撞加速度信号;参考信号r(t)为参考关节角,即碰撞前颈部的弯曲程度;反馈信号yd(t)与参考信号r(t)进行比较,得到偏差信号e(t);PID控制模块根据偏差信号的大小作出相应调控,得到肌肉刺激信号u(t),模拟中枢神经对肌肉收缩进行调控的电位信号;激活等级整定模块根据肌肉激活理论对刺激信号u(t)进行调整和规范,从而获得肌肉激活等级A(t),控制肌肉的激活程度;A(t)作用于头颈部有限元模型的Hill肌肉单元,控制头颈部关节弯曲角度的变化,实时角度的反馈又将产生新的误差,这样反复调整直到误差为零,从而实现了肌肉主动力对头颈部姿势的调节。
在有限元平台上实现肌肉主动力控制,需采用keyword关键字编程实现以下模块功能:
(1)实时关节角的测量;
(2)神经延迟的模拟;
(3)基于PID控制生成肌肉刺激信号;
(4)整定刺激信号,获得相应的肌肉激活等级;
(5)PID控制参数的整定。
2.2 颈部实时关节角的测量
关节角的测量和计算通过矢量计算完成。分别取人体模型中第一胸椎T1中心点和第一颈椎C1中心点为基准点n1和n2,如图4所示。
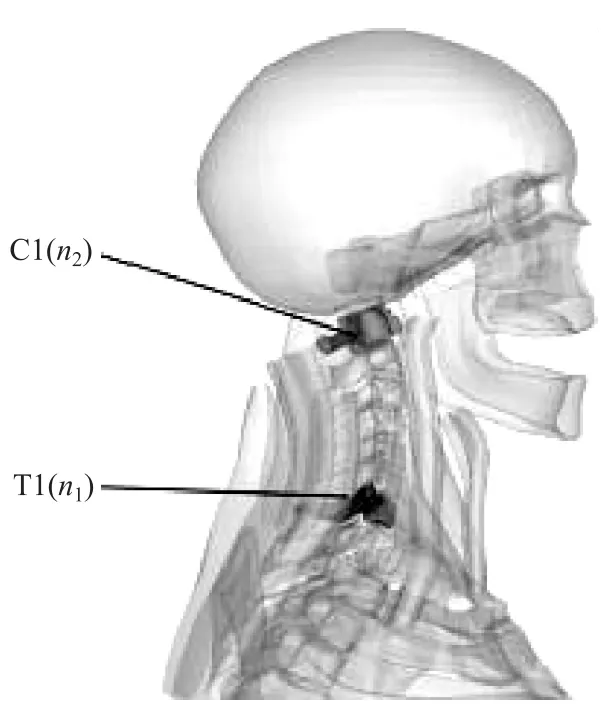
图4 颈部关节角计算基准点
根据下式可计算两点所成的矢量与竖直方向的夹角,从而获得颈部实时弯曲角y(t)。

在有限元平台,利用LS-DYNA函数库中的CX(节点ID)、CY(节点ID)、CZ(节点ID)指令获取基准点 n1和 n2的实时坐标,并通过∗DEFINE_CURVE_FUNCTION完成公式计算,实现有限元环境中对实时颈部弯曲角的计算。
利用所编程序获得颈部弯曲角,与仿真hyperview测得的颈部弯曲角进行对比,结果如图5所示,验证了程序的功能。
2.3 神经延迟的模拟
神经延迟模块模拟驾乘人员面对紧急情况下肌肉反应的延迟,利用简单1阶惯性环节的相位滞后特性来实现神经延迟的模拟,在有限元环境中构建1阶惯性环节的思路,如图6所示。

图5 实时颈部弯曲角度测量程序验证
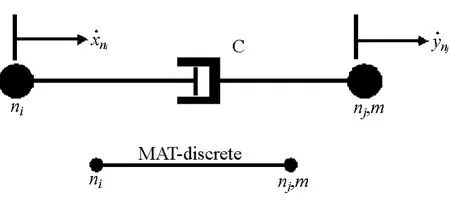
图6 1阶惯性环节的物理模型
在头颈部有限元模型外定义两个参考点(ni,nj),用纯黏性属性的离散单元连接两个参考点,C为离散单元的黏性参数值,定义nj质量为m,并通过关键字∗BOUNDARY_PRESCRIBED_MOTION_NODE加载一速度曲线作为ni的运动输入,利用关键字∗HISTORY_NODE获取nj的速度输出,则其传递函数为
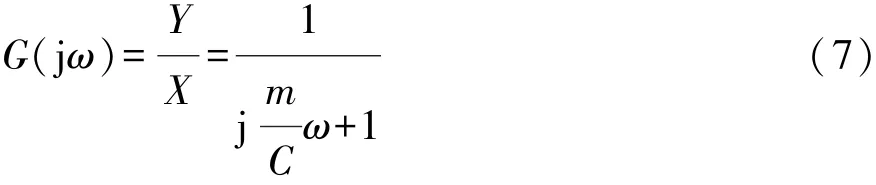
神经延迟取决于刺激信号往返中枢神经所需要的时间,采用 Vlugt实验[15]获得的神经延迟时间Tde,令1阶惯性系统的时延等于Tde,根据式(8)即可通过确定合适的m和C值获得需要的延迟时间。

设定神经延迟时间Tde为3ms,用简谐信号进行测试,结果如图7所示,输入和输出曲线波形不变,产生了3ms的时间延迟,达到了预期的效果,从而验证了采用1阶惯性环节在有限元平台实现信号延迟的可行性。
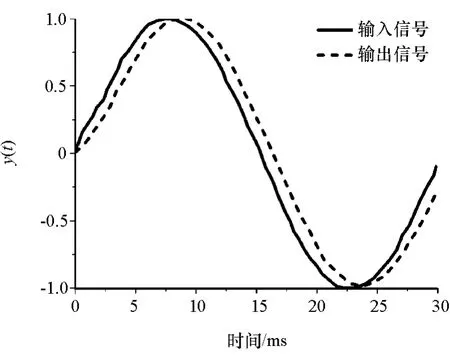
图7 神经延迟环节程序验证
2.4 基于PID控制生成肌肉刺激信号
PID控制模块对颈部实时弯曲角度与碰撞前的弯曲角度之间的误差信号进行比例、积分、微分运算,得到姿势保持所需的相应肌肉刺激信号u(t),计算公式为

LS-DYNA函数库中没有积分和微分函数,通过物理建模的方法,利用LS-DYNA求解器实现积分和微分运算,获取误差信号的积分和微分曲线。通过∗BOUNDARY_PRESCRIBED_MOTION_NODE定义某节点的速度曲线为偏差信号e(t),并通过∗DEFINE_CURVE_FUNCTION的指令 dx(节点ID)与accx(节点ID)获取该节点的位移和加速度曲线,即分别完成了积分∫e(t)和微分d e(t)运算,并利用LS-DYNA关键字编写相应的PID计算程序,完成PID控制模块的建立。
利用所编程序完成单位阶跃信号的调整,结果如图8所示,验证了该方法的可行性。
2.5 激活等级整定模块
PID控制模块生成模拟肌肉用以维持姿势所受的电位信号u(t),但该信号不能直接作用于力学模型。激活等级整定模块主要功能包含两部分:模拟肌肉激活等级机理和限定激活等级范围,从而获得可用的肌肉激活等级A(t)。
根据肌肉激活理论,文献[13]中用两个低通滤波器串联模拟肌肉激活等级生成过程,对控制曲线的幅值和曲率进行调整,即


图8 PID控制回路验证

第一个滤波器模拟由肌肉刺激信号u(t)获得神经刺激Ne(t)的过程,时间常数Tne的大小影响刺激信号的输出速率;第二个滤波器模拟了肌肉激活/钝化的过程,获得了肌肉激活等级A(t),时间常数Tna影响肌肉的响应速度,分为激活时间常数Tnaa和钝化时间常数Tnad,分别控制肌肉的激活和钝化速度。
根据文献[2]中的研究可知,肌肉激活等级的最大极限为70%,最小极限为0.5%,激活等级越大,肌肉的主动收缩力越大。激活等级整定模块对刺激信号u(t)进行规范,并将其限制在最大最小极限之间,得到可用的激活等级A(t)。
2.6 PID控制参数整定
PID控制参数的整定是控制器能否达到最优效果的关键所在,需要对其控制参数进行整定。PID控制参数整定流程如图9所示。

图9 PID控制参数整定流程图
利用头颈部参考角度与hyperview所测得的被动力模型颈部弯曲角度进行对比,获取偏差信号。对偏差信号进行延迟,模拟神经调节的延时性,PID控制器与激活等级整定模块对延迟信息进行处理,获得颈部肌肉激活等级A(t),对PID参数进行调整,获得较优结果,经PID参数整定所获取的肌肉主动力控制系统参数如表2所示。
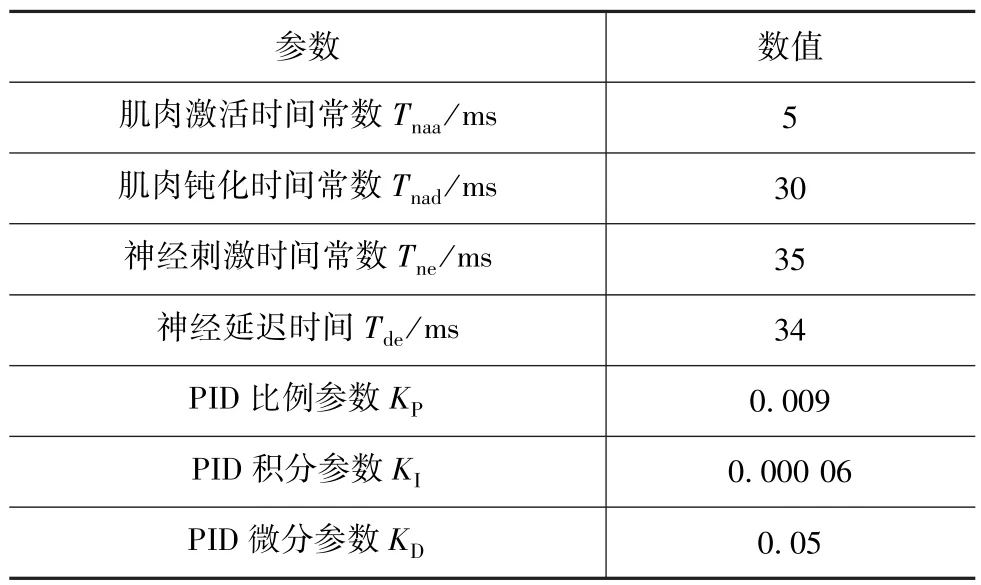
表2 肌肉主动力控制系统参数
3 模型验证
对建立了肌肉主动力控制模型的头颈部有限元模型进行前、后碰撞仿真实验,通过与志愿者实验数据和基础模型进行对比分析,对基于PID反馈控制的肌肉主动力模拟效果进行评估,并完成改进后的头颈部模型验证。
3.1 前碰撞验证
对添加了肌肉主动力控制的头颈部有限元模型进行15g前碰撞仿真实验,对其有效性进行验证。文献[16]中在美国海军生物力学实验室开展了一系列志愿者台车实验,研究人体头颈部在冲击载荷下的动力学响应,积累了大量实验样本,并测定了丰富的动力学参数,可为模型验证提供重要的数据来源。该实验中,志愿者的胸部被约束系统所限制,以便于研究头颈部的动力学响应,这也为独立的头颈部模型的验证提供了参考。根据志愿者前碰撞实验条件设置仿真模型的边界条件,从仿真结果提取特定运动学参数与志愿者实验数据进行对比,对肌肉主动力控制模型进行验证。
整个模型置于加速度为9.81m/s2的重力场中,约束胸部除Y向水平平动和绕X轴转动以外的其他自由度,定义肌肉之间、肌肉与骨骼之间、骨骼之间的接触约束。根据志愿者实验数据,设置运算时间为250ms,并将志愿者实验结果T1水平加速度和转动角位移作为有限元模型的运动输入,完成前碰撞验证仿真实验,前碰撞验证加载曲线如图10所示,头颈部的动力学响应全过程如图11所示。

图10 前碰撞验证加载曲线

图11 前碰撞仿真验证中头颈部动力学响应
从图10可知,0-60ms整个模型几乎处于静平衡状态;60-100ms,T1开始有明显的水平运动,头部因为惯性作用几乎没有运动;100ms后,头部发生明显的转动,在 160ms左右达到最大弯曲;160-250ms,头颈在肌肉的拉伸作用下逐渐回弹;在250ms时基本恢复正常坐姿时头颈的姿态。
已有研究表明,活性肌肉会在碰撞过程中产生响应,所产生的力将改变头颈部的动力学响应。当志愿者身处不断增强的冲击载荷时,肌肉会紧绷以反抗冲击的影响。仿真中,肌肉激活的触发时间Ta受碰撞强度和神经反应时间的影响,即

式中:Tc为T1水平加速度曲线加速段的起点;Td为神经延迟时间,即刺激在反射弧中传递所需要的时间。在本研究中,根据志愿者实验结果,Tc定义为44ms,Td的取值范围为10~120ms,其值取决于该神经刺激传递所需要的时间,头颈部神经延迟的取值为34ms,故肌肉激活时间Ta为78ms[17]。如通过基于PID肌肉主动力控制模型所获取的胸锁乳突肌激活等级曲线与志愿者T1加速度曲线的关系如图12所示。
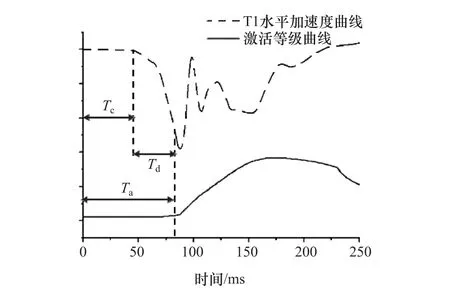
图12 肌肉激活等级曲线和T1冲击加速度曲线
对基础模型、主动力模型和志愿者实验的运动学指标进行对比,如图13所示,其中头部相对转动角度和颈部相对转动角度分别定义为正中矢状面内头部质心与颅骨枕髁连线以及颅骨枕髁与T1质心连线相对于T1解剖学坐标系转动的角度。
从图13可见:添加了反馈控制的有限元模型在前碰撞验证仿真中的运动学参数与志愿者实验数据具有更好的一致性,幅值与变化趋势基本相同,且曲线基本位于志愿者实验所确定的响应范围内,其误差分析如表3所示。

表3 具有反馈控制模型的前碰撞响应误差分析
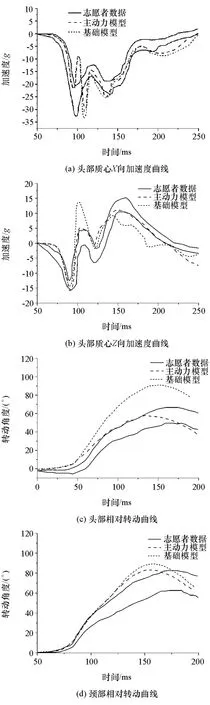
图13 前碰撞运动学响应对比
头部质心X向加速度产生偏差的原因在于本文中采用独立的头颈部模型进行前碰撞仿真实验,在水平加速度达到第一个波峰时,由于缺少胸部对颈部冲击载荷的缓冲,会出现双波峰现象,这是独立头颈部模型前碰撞出现的普遍现象;仿真模型在250ms前已经回到了初始位置,由于惯性的作用继续向后运动,此时头部受到颈部屈肌拉伸作用,从而导致了仿真与实验的头部质心Z向加速度出现偏差;志愿者在前碰撞实验前期,预知即将发生碰撞,会潜意识地向后微仰,所以在25~75ms之间头部转角为负;有限元模型不能模拟人的潜意识,只能随着碰撞强度的增大,作出相应的响应,头部相对转动响应有些许偏差;仿真模型颈部弯曲最大角度与志愿者实验的角度值相当,但由于仿真模型的肌肉激活速率略慢,使伸肌的拉伸不强,从而导致颈部达到最大弯曲的时间提前,所以产生了偏差。
由以上前碰撞头颈部动力学响应对比和误差分析可见,具有反馈控制的有限元模型的有效性得到验证,且优于基础模型。
3.2 后碰撞验证
对添加了肌肉主动力控制的头颈部有限元模型进行4g追尾碰撞仿真实验,对其进行有效性验证。日本汽车研究中心(JARI)进行的滑车志愿者实验,研究人体头颈部在模拟追尾环境下的动力学响应,具有丰富的志愿者实验样本和丰富的运动力学参数,为模型追尾碰撞仿真提供重要的数据参考[18-19]。通过台车实验获取的志愿者T1运动学数据,可作为独立的头颈部模型后碰撞仿真的边界条件。从仿真结果提取特定运动学参数与志愿者实验数据进行对比,对肌肉主动力控制模型进行验证;并与基础模型的动力学响应对比。
仿真实验载荷与边界条件设置如下:对模型加载9.81m/s2竖直向下的加速度,模拟重力加速度;约束胸部的自由度,使其只能进行水平和矢状面的运动;将JARI志愿者实验的T1水平位移、竖直位移与转角曲线作为运动加载曲线,如图14所示。通过关键字∗BOUNDARY_PRESCRIBED_MOTION_NODE分别加载在T1的解剖学坐标系原点上;运算时间设置为300ms,完成后碰撞验证仿真实验。
后碰撞过程中头颈部有限元模型与志愿者的动力学响应全过程对比如图15所示。

图14 后碰撞加载曲线
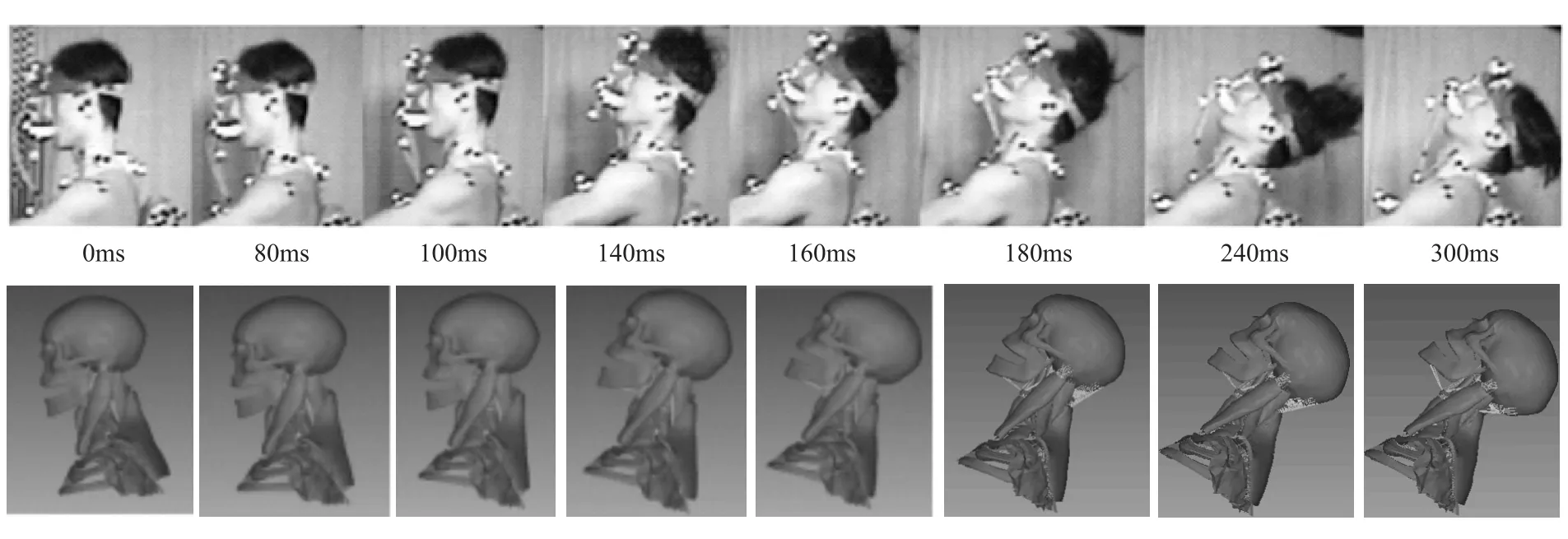
图15 后碰撞仿真验证中头颈部动力学响应
从图15可知,0-80ms之间整个模型几乎处于静平衡状态;从80ms时刻开始T1产生向前的水平运动,并带动C2-C7颈椎和肌肉下端点向前运动,头部和C1颈椎由于惯性作用几乎没有运动;直至100ms,头部和上端椎体开始产生明显的向后运动;100-120ms之间,头部和上端椎体继续向后弯曲,而下端椎体则开始不同程度的伸展运动,颈部上端椎体弯曲运动,下端椎体伸展运动,使整个颈椎形态呈现“S”曲线;120ms之后颈椎各个阶段均处于伸展状态,整个颈椎伸展,头部继续向后转动,直至200ms头部向后运动到极限位置,颈部运动达到最大弯曲变形;200-300ms期间,由于没有头枕的约束,头将继续向后,但是在肌肉、韧带拉伸作用下,颈部的弯曲角度几乎没有发生太大变化,在T1转动的驱动下,有明显的下潜现象。整个仿真实验运动过程与志愿者后碰撞中颈部运动响应过程基本一致。基础模型、主动力模型和志愿者实验的运动学响应对比如图16所示。
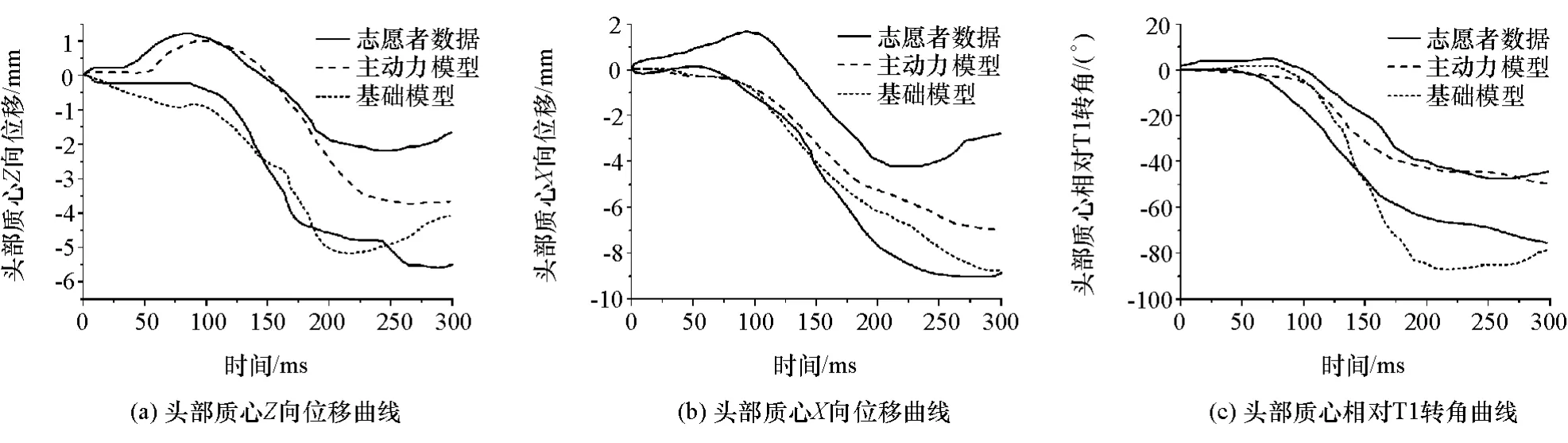
图16 后碰撞运动学响应对比
从图16可见:添加了反馈控制的有限元模型在前碰撞验证仿真中的运动学参数与志愿者实验数据具有更好的一致性,幅值和变化趋势基本相同,曲线基本位于志愿者实验所确定的响应范围内,且相对于基础模型,其结果更接近志愿者的运动学响应。如图16(a)所示,追尾碰撞中,基础模型具有较大的头部质心Z向位移,因为在颈部伸展的过程中,主动力模型的颈前肌肉被激活,产生肌肉主动收缩,一定程度上抑制了颈部的伸展,从而减小Z向位移;而图16(b)和图16(c)中,125ms之前,主动力模型和基础模型差别不大,因为此时载荷较小,颈部发生了较小的弯曲,主动力作用不强。125ms后,颈部加速弯曲,随之主动力作用加强,主动力模型与基础模型之间的差异也逐渐增加,其误差分析如表4所示。

表4 具有反馈控制模型的后碰撞响应误差分析
由以上分析可见,具有反馈控制的有限元模型的后碰撞有效性得到验证,且添加了PID主动力控制的头颈部有限元模型在后碰撞中,通过肌肉的主动收缩,能够有效地限制头颈的运动,避免了不实的过度伸展,能够较好地反映乘员的动力学响应。
4 结果与讨论
研究基于控制理论的肌肉主动力模拟方法及其在有限元模型中的实现,利用LS-DYNA关键字构建反馈控制模型,将控制模型与力学模型相结合,实现了肌肉主动力的控制,并根据志愿者碰撞实验数据对模型进行了验证。依据验证结果和理论的分析,得到以下结论。
(1)在人体有限元模型中,通过反馈控制实现人体模型的姿势维持和肌肉条件反射模拟的方案是可行的。
(2)用LS-DYNA关键字编写控制程序实现主动力控制模型是可行的,灵活利用LS-DYNA关键字,建立物理控制模型,是关键字编写控制程序的一种重要方法。
(3)肌肉的主动响应对头颈动力学过程存在影响。
(4)添加了反馈控制的头颈有限元模型在前后碰撞中的动力学响应与志愿者实验数据基本一致,验证了模型的可靠性。该模型可用于后续工作,研究肌肉主动力对碰撞交通事故中头颈部的动力学响应和损伤的影响。
本研究中把颈部肌肉划分为屈肌和伸肌两大类,并分别生成不同的激活等级曲线,这种分类方法忽略了碰撞过程中肌肉的作用部位,这可能是引起头部和颈部相对转动曲线波峰偏移的重要原因。下一步工作应根据肌肉的作用部位以及功能对肌肉进行更细致的划分,从而提高其生物逼真度。
[1] MIZUNO Y,ISHIKAWA H.Summary of IHRA pedestrian safety WG activities-proposed test methods to evaluate pedestrian protection afforded by passenger cars[C].Proceedings of the 18th ESV conference.Washington:The Ehanced Safety of Vehicles Conference,2005.
[2] BRELIN-FORNARI J, SHAH P, El-SAYED M.Physically correlated muscle activation for a human head and neck computational model[J].Computer Methods in Biomechanics and Biomedical Engineering,2005,8(3):191-199.
[3] VAN DER HORST M J,THUNNISSEN J G M,HAPPEE R,et al.The influence of muscle activity on head-neck response during impact[C].Stapp Car Crash Conference,1997:382-383.
[4] 黄晶,钟志华,胡林,等.新型管式气囊的防护性能分析及结构优化[J].机械工程学报,2009,45(6):107-112.
[5] BROLIN K,HALLDIN P,LEIJONHUFVUD I.The effect of muscle activation on neck[J].Traffic Injury Prevention,2005,6(1):67-76.
[6] CHANCEY V C,NIGHTINGALE R W,VAN C A,et al.Improved estimation of human neck tensile tolerance:reducing the range of reported tolerance using anthropometrically correct muscles and optimized physiologic initial conditions[J].Stapp Car Crash Journal,2003,47:135-153.
[7] HUANG J, ZHONGZ, HU L, et al.Modeling and simulation of a sandwiched tube-type airbag and its optimization using design of experiments[J].PIMEPart D:Journal of Automobile Engineering,2007,221(9):1089-1095.
[8] CAO Y C,LI F,HU W,et al.Development and validation of a human neck muscles FE model in low-speed vehicle collisions[C].Proceedings of the 11th International Forum of Automotive Traffic Safety,2014:326-333.
[9] ÖSTH J,BROLIN K,HAPPEE R.Active muscle response using feedback control of a finite element human arm model[J].Computer Methods in Biomechanics and Biomedical Engineering,2012,15(4):347-361.
[10] ÓLAFSDÓTTIR J M,ÖSTH J K H,DAVIDSSON J,et al.Passenger kinematics and muscle responses in autonomous braking events with standard and reversible pre-tensioned restraints[C].Proceedings of the IBCOBI Conference.Gothenburg, Sweden,2013:602-617.
[11] 杨济匡,姚剑峰.人体颈部动力学响应分析有限元模型的建立和验证[J].湖南大学学报(自然科学版),2003,30(4):40-46.
[12] LI F,LAVILLE A,BONNEAU D,et al.Study on cervical muscle volume by means of three-dimensional reconstruction[J].Journal of Magnetic Resonance Imaging,2014,39(6):1411-1416.
[13] WINTERSJM,STARK L.Analysis of fundamental human movement patterns through the use of in-depth antagonistic muscle models[J].IEEE Transactions on Bio-medical Engineering,1985(10):826-839.
[14] WINTERS J M,STARK L.Estimated mechanical properties of synergistic muscles involved in movements of a variety of human joints[J].Journal of Biomechanics,1988,21(12):1027-1041.
[15] DEVLUGT E,SHOUTEN A C,VAN DER HELM,et al.A force-controlled planar haptic device for movement control analysis of the human arm[J].Journal of Neuroscience Methods,2003,129:151-168.
[16] GAYZIK F S,MORENO D P,VAVALLE N A,et al.Development of a full human body finite element model for blunt injury prediction utilizing a multi-modality medical imaging protocol[C].12th International LS-DYNA Users Conference,2012.
[17] DONG L Q,KIM Y J,BOZEK G,et al.Investigation of pediatric neck response and muscle activation in low-speed frontal impacts[J].Computer Methods in Biomechanics and Biomedical Engineering,2015,18(15):1680-1692.
[18] ONO K, INAMI S, KANEOKA K, et al.Relationship between localized spine deformation and cervical vertebra motions for low speed rear impacts using human volunteers[C].International IRCOBI Conference on the Biomechanics of Impacts,1999:149-164.
[19] 杨济匡,肖志,万鑫铭.使用人体颈部有限元模型研究汽车后碰撞中的颈部损伤[J].汽车工程,2007,29(6):457-461.
Modeling of Active Muscle Force in Human Neck with Feedback Control
Huang Jing1, Tan Zhan1& Hu Lin2,3
1.Hunan University, State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Changsha 410082;2.School of Automotive and Mechanical Engineering, Changsha University of Science and Technology, Changsha 410114;3.Changsha University of Science and Technology,Hunan Province Key Laboratory of Safety Design and Reliability Technology for Engineering Vehicle,Changsha 410114
In view of that the absence of active muscle force in human body model used in vehicle traffic accident simulation restrains the thorough cognition of human injury mechanism,establishing the math model for active muscle force to get the simulation results with high biofidelity in evaluating the efficacy of active safety system is of high significance.In this paper, based on the finite element(FE)models for human head and neck, the feedback control program is compiled with keywords in LS-DYNA to fulfil active muscle force control and conduct active muscle force simulation in FE model,with its results compared with those from base model and volunteer sled tests.The results show that adding the feedback control of active muscle force in head-neck FE model makes the dynamics simulation results closer to the real response of occupants and active muscle force plays an important role in enhancing biofidelity of human body FE model.
10.19562/j.chinasae.qcgc.2017.09.009
∗国家自然科学基金(11202077和51475048)资助。
原稿收到日期为2016年9月20日,修改稿收到日期为2016年10月25日。
黄晶,助理教授,E-mail:haungjing926@hnu.edu.cn。
