“自动控制原理”课程案例式教学方法探索
2017-09-08林旭梅
林旭梅
(青岛理工大学 自动化工程学院, 山东 青岛 266520)
“自动控制原理”课程案例式教学方法探索
林旭梅
(青岛理工大学 自动化工程学院, 山东 青岛 266520)
本文针对“自动控制原理”课程内容偏向理论、学生学习积极性不高等问题,在一系列教学改革措施的基础上提出案例式教学方案。方案中以电子设计竞赛中简易旋转倒立摆为研究对象,将倒立摆数学建模和PID控制算法应用到简易旋转倒立摆系统的分析中。本文通过对这一案例的分析表明了案例式教学方法有助于学生深刻理解自动控制理论,能够将课程理论知识与实际应用相结合,提高学生学习兴趣。
自动控制原理;教学改革;案例式教学;旋转倒立摆
0 引言
“自动控制原理”课程是高校自动化工程、电气工程及自动化和测控专业学生必修的一门专业基础课[1]。在当今科技信息飞速发展的时代,自动化技术地位日臻凸显,“自动控制原理”作为自动化专业的核心课程其作用之大毋庸置疑[2]。
“自动控制原理”课程的主要特点是理论性很强,概念较多,计算量较大。目前,如何提高该课程的教学质量,加强课程的建设与改革成为教学工作者需研究的首要问题。
随着大学教育改革推进,大学课程的课时数在缩减,为了让学生在短时间内掌握“自动控制原理”课程的基本内容与原理,并将学到的理论知识用于分析和解决工程问题。这就要求本课程必须的教学改革不单单是教学手段和教学方法的改革,也不单单是提高教师的授课水平和质量,还要提高和利用好与本课程相关的实验教学。
1 目前存在的主要问题
在“自动控制原理”课程教学中常见的问题有以下几个方面[3]:
(1)学生学习主动性不高,不能主动将精力投入到本课程的学习中,缺乏兴趣,从本质上来说就是缺少主动学习的动力;
(2)本课程侧重理论教学和数学模型的建立与分析,内容比较抽象,相关理论知识比较枯燥且难以理解;
(3)学生在学习的过程中把握学习重点、知识系统性能力较弱;
(4)学生在学习过程中主动提出问题、综合分析问题、亲自解决问题的能力有限;
(5)学生不能将课程中的理论知识与实际应用中遇到的问题紧密结合,将理论知识熟练灵活地应用到解决实际问题中去。
(6)很多高校虽然具备一定的实验教学设备,但大多是以简单的实验教学设备满足课程教学。实验教学中,缺乏实际的案例,尤其是系统级的案例。
教学中存在这些问题,致使有些学生在学习完这门课程后,还不知道自动控制理论应用于什么场合,能解决什么问题,更谈不上分析和解决实际问题了。
2 教学改革措施
针对上述的“自动控制原理”课程教学中存在的主要问题,我们结合多年教学经验,把案例式教学引入并贯穿于本课程整个教学过程中,即:紧跟信息时代发展前沿,提高课程的先进性;重视理论知识的学以致用,提高课程的应用性;着重培养学生动手实践的能力,提高课程的应用与实践性;加大具体案例与课程中的分析方法、理论知识的结合,充分激发学生的学习兴趣,提高学生的自主学习能力体现课程的行业性[4]。
具体的实施策略为:①以学术探讨和科学研究促进教学,开拓学生的视野。教师在教学过程中,除了教授本课程的知识,还可以将自己在学术研究上的成果与本课程的教学相结合,使科研与教学紧密相连,有利于学生对本课程的前沿知识的了解及对本课程知识点的理解;②以实践为中心促进教学,加强学生动手操作与分析问题解决问题能力的培养。本课程的实践内容包括:以验证某个定理或理论知识正确性为目的的实验、系统的综合设计性实验,还有相关的课程设计以及课外探讨研究性试验等;③以实际案例项目促进教学,强调工程背景的重要性与关键性。例如联系全国大学生电子科技竞赛等方面的实际案例,结合本课程的相关知识点,以适当的方式嵌入到课程教学中,加强学生动手能力的培养;④以激发学生的兴趣为目标推动教学,在满足学生的个性需求的基础上不断培养学生的学习积极性。满足学生的兴趣爱好来带动教学,会达到事半功倍的效果。教师应根据学生的兴趣点和教学理论知识框架,通过分层次、多层次的教学方法来完成对本课程知识的讲解与传授。
3 案例式教学方法
在“自动控制原理”课程的传授与讲解中,我们一再强调案例式教学方法的必要性与重要性。一方面能够加强学生对所学理论知识的深入理解,另一方面也能够使学生对实际工程产生兴趣,提高对本课程的深入认知[5,6]。一直以来,倒立摆控制系统在“自动控制原理”教学中得到广泛传授,因为它融合了自动控制领域以及物理、数学等专业领域的多种技术,它的被控对象具有多变量、高阶次、强耦合的特点[7]。
为了实现对旋转倒立摆系统的控制,数学模型的建立是研究的第一步。建模过程中要对控制系统进行受力分析。这部分知识学生可以根据所学的物理知识或查阅资料文献自行研究,得出系统传递函数。模型建立后,运用 Matlab仿真软件对控制系统进行Simulink仿真。学生需要通过不断修改PID控制算法参数,使仿真的系统性能指标符合要求,再将该PID控制参数应用于实际,并根据实际控制效果适当调整PID参数,使相关性能指标满足要求。
作为案例式教学方法应用的一个案例,本文以2013年全国大学生电子设技竞赛题目——简易旋转倒立摆为例,采用PID控制算法等与“自动控制原理”相关的理论知识对旋转倒立摆系统进行分析。通过对该系统的分析与仿真,学生能够对自动控制理论中的建模、PID控制算法有更深入的认识,理解比例(P)的快速调节作用、积分 (I)消除余差以及微分(D)提前遏制误差变化趋势作用。
首先,要求动手设计制作一个简易旋转倒立摆模型。将一电动机固定在支架上,另有一旋转臂通过转轴与支架相连,旋转臂的一端安装另一转轴,摆杆通过转轴与旋转臂相连。简易旋转倒立摆控制系统的结构示意图如图1所示。

图1 简易旋转倒立摆结构示意图
针对这一案例的具体要求,确定系统的方案如图2所示。
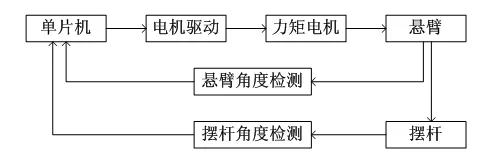
图2 系统方案框图
方案主要包括以下几个模块:单片机控制模块、旋臂和摆杆执行机构、角度检测模块以及机械模块。系统角度传感器测量摆杆的摆动角度并将采集的角度数值反馈给控制器,控制器根据接收的数值进行姿态计算,选取合适的控制量对电机控制,控制旋臂的转角和方向,使摆杆获得理想的摆动角度。
图3为简易旋转倒立摆系统的采样控制流程图。本系统通过运用闭环控制,经过PID参数调整,使摆杆达到期望要求的状态。
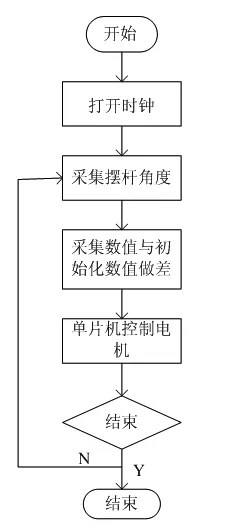
图3 系统采样控制流程图
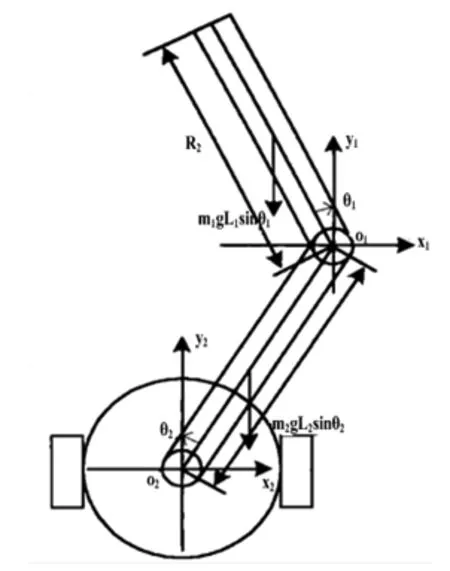
图4 简易旋转倒立摆模型分析
简易旋转倒立摆系统模型分析示意图如图4所示。
根据文献[8]得到如下公式:
(1)
式(1)中J1为旋臂绕轴转动惯量,J2为摆杆绕轴转动惯量,m1为旋臂质量,m2为旋臂长度,R1为旋臂长度,R2为摆杆长度,L1为旋臂质心到转轴距离,L2为摆杆质心到转轴距离,θ1为旋臂位置,θ2为摆杆位置,f1为旋臂绕轴转动摩擦力矩系数,f2为摆杆绕轴转动摩擦力矩系数,Km为电机力矩-电压比,Ke为电机反电势-转速比。
对系统进行相应的机理建模后可以得到较为准确的数学模型,进而通过计算和分析可以得到系统的传递函数。根据所得传递函数,在Matlab应用软件中运用Simulink对系统进行仿真与分析。简易旋转倒立摆系统θ2的仿真模型见图5。
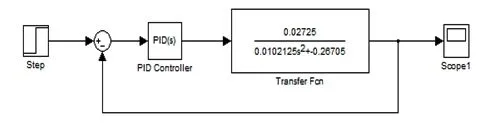
图5 简易旋转倒立摆系统的仿真模型
第一步建立好系统仿真模型,下一步工作是对倒立摆控制系统的PID参数进行调节和整定。图5中,“PID Controller”为封装后的PID控制器,用于设置和修改PID控制参数Kp、Ki和Kd;“Transfer Fcn”是摆杆的摆动角度和悬臂加速度之间的传递函数;通过“Scope1”可以显示在不同参数下相应的仿真结果图。在只有P控制时,将Kp、Ki、Kd分别设置为40,0,0时得到的仿真结果如图6所示。
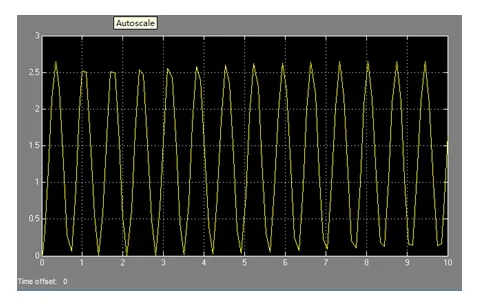
图6 Kp=40,Ki=0,Kd=0时的仿真结果图
从图6中可以看出,控制曲线是振荡不收敛的。为了减小或消除系统的振荡,增加微分控制环节,将Kp、Ki、Kd分别设置为40,0,1时得到的系统仿真结果如图7所示。
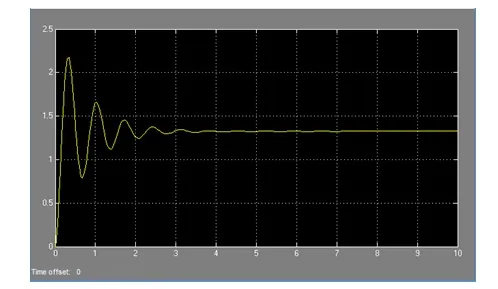
图7 Kp=40,Ki=0,Kd=1时仿真结果图
由图7可知,当Kp=40,Ki=0,Kd=1时,闭环控制系统依然存在振荡现象,为更好的消除系统的振荡,在Kp=40的基础上增大微分系数Kd,Kd=10时系统仿真结果图如图8所示。
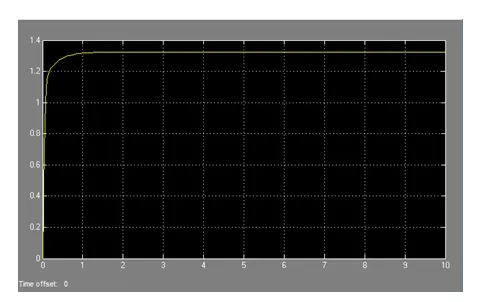
图8 Kp=40,Ki=0,Kd=10时系统仿真结果图
由图8可得,系统虽能较快达到平衡状态,但是存在一定的稳态误差。为了提高系统的无差度,消
除系统的稳态误差,添加积分环节Ki,令Kp=40,Ki=35,Kd=10,得到系统的仿真结果如图9所示。
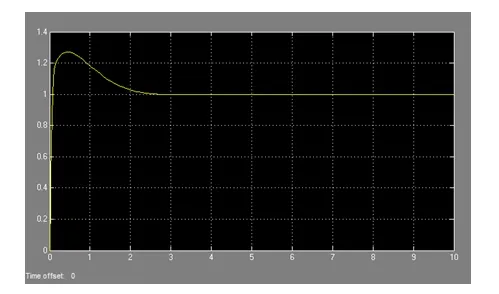
图9 Kp=40,Ki=35,Kd=10系统仿真结果图
5 结语
通过简易旋转倒立摆系统模型的建立及PID控制下的仿真试验,学生不仅对倒立摆的二阶系统有了了解,对PID不同环节的作用有了更深体会,还对自动控制系统的建模技术、闭环控制、系统校正等相关知识有了深入的理解。简易旋转倒立摆的案例证明,将案例式教学方法应用于“自动控制原理”课程教学中,使学生对“自动控制原理”相关知识具有深刻的认知和体会,让学生深入掌握课程核重点难点,进而提高学生的学习效率。
[1] 唐超颖,姜斌. “自动控制原理”课程的探究性教学实践[J]. 南京:电气电子教学学报,2007,29(06):91-93.
[2] 何兵. 基于案例化的高职《自动控制原理与应用》教学改革[J]. 泸州:泸州职业技术学院学报,2011(02):1-16.
[3] 刘海涛,赵娟,李伟洪. 面向创新能力培养的自动控制原理教学方法研究[J]. 中国教育技术装备. 北京:2015,12(24):90-92.
[4] 欧阳鑫玉,陈雪波. 自动控制原理课程建设与教学实践[J]. 北京:中国电力教育,2012(18):52-54.
[5] 陈艳菲. 倒立摆在自动控制原理综合实验中的应用[J]. 北京:中国科教创新导刊,2013(32):94-96.
[6] 魏伟,翁贻方,金学波,刘翠玲,刘载文. “自动控制理论”教学中几个问题的探讨[J]. 南京:电气电子教学学报,2015,37(06):57-60.
[7] 梁春辉,冯雷,张欣. 直线一级倒立摆控制策略研究及仿真分析[J]. 长春:长春工程学院学报(自然科学版),2010,11(1):36-40.
[8] 段旭东,许可. 单级旋转倒立摆的建模与控制仿真[J]. 机器人技术与应用,2002,5:43-46.
The Exploring of Case Teaching Method in Automatic Control Principle Course
LIN Xu-mei
(SchoolofAutomation,QingdaoTechnologicalUniversity,Qingdao266520,China)
According to the questions which lay particular stress on theory and student′s learning enthusiasm is lower for Automatic Control Principle course. The case teaching method is proposed based on series of measures of the teaching reform. By using a simple rotary inverted pendulum in electronic design competition as the research object, mathematic modeling of inverted pendulum and the PID control are applied to the analysis of a simple rotary inverted pendulum system. By the control of a simple rotary inverted pendulum system shows that the case teaching method is helpful for students to deep understanding the theory of automatic control and to be able to combine the theory of curriculum knowledge with practical application, which improve students' learning interest.
principle of automatic control ; teaching reform ; case teaching method; rotational inverted pendulum
2016-08-07;
2016-12- 29
林旭梅(1970-)女,博士,教授,主要从事自动化专业教学与科研工作,E-mail:lxm-ll@163.com
G642.0
A
1008-0686(2017)04-0116-04