铁路车轮超声波B型检测的图像分割算法
2017-08-31任明照高东海郑韵娴
任明照,高东海,郑韵娴
(中国铁道科学研究院 金属及化学研究所,北京 100081)
铁路车轮超声波B型检测的图像分割算法
任明照,高东海,郑韵娴
(中国铁道科学研究院 金属及化学研究所,北京 100081)
基于图像分割原理,对检测图像中的缺陷区域进行分割和提取,根据超声波B型图像在纵向和横向的不同特点,改进了传统区域生长的图像分割方法;以超声波B型图像中的颜色极值点为种子像素,在图像的纵向和横向采用不同的生长准则,提出了在纵向上采用波谷阈值的生长准则,在横向上采用相关系数阈值的生长准则,并通过实际的铁路车轮超声波B型检测试验验证,取得了良好的缺陷信号区域分割效果。
铁路车轮;超声波B型检测;图像分割;区域生长
铁路车轮超声波B型检测是近年来研究的热点,相比于传统的车轮A型检测[1],B型检测具有较高的检测效率。B型检测将多个A型检测波形数据显示在了一张图像上,检测人员可以一次观察到多个A型数据,并结合位置关系推断缺陷信号,这种方式受检测人员的专业知识、技能和经验等主观因素影响很大;而且对于大范围、多探头的车轮超声波B型检测,人工检测效率较低。因此研究车轮超声B型图像处理算法,自动获取图像中的缺陷信号区域,以及提高检测效率变得非常重要。现有的超声B型图像处理算法主要用于医学超声上,例如采用图像增强和边缘检测等算法,可以使肿瘤图像更清晰[2];采用均衡化处理,可以消除浅表造成超声图形的斑点噪声[3]等,但在铁路车轮超声B型图像的处理上,目前还未见报道。
笔者针对铁路车轮超声波检测的B型图像,采用图像分割方法,对检测图像中的缺陷区域进行分割和提取,结合超声波B型图像的特点,改进了传统区域生长的图像分割方法,利用超声波B型图像在二维方向所代表的不同含义,分别采用不同的生长规则,实现了缺陷区域的分割,并通过实际的车轮检测试验取得了良好的分割效果。
1 铁路车轮超声B型成像检测
铁路车轮超声B型检测以A型检测为基础,最常见的方式是在车轮踏面上放置超声波探头,铁路车轮超声B型成像检测示意如图1所示。

图1 铁路车轮超声B型成像检测示意
车轮以一定的转速转动,超声波探头保持不动,连续对车轮内部进行超声波A型检测,并记录检测数据,这样车轮转动一周后,完成了车轮整个周长的B型检测,形成的B型检测数据是由记录的大量A型检测数据组成的矩阵,以图像的方式显示(见图2);其横坐标为车轮转过的周向位移,纵坐标为声波传播时间,波幅的大小映射到颜色表上,用颜色值表示,B型图像矩阵的每一个列向量都是一次独立的A型检测数据。
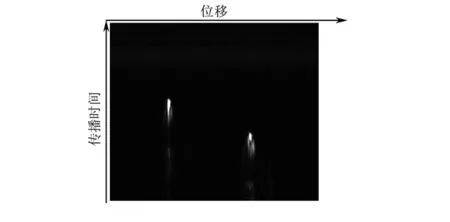
图2 铁路车轮超声波B型图像
上述B型检测过程中,为了消除检测盲区,保证相邻两次检测探头的声场有足够的重叠范围,车轮转速ω、车轮半径r、超声波探头的晶片尺寸D、还有超声波检测仪的重复频率f需要满足以下关系式[4]
(1)
式中:v为车轮与探头接触面上的线速度;N为重复次数,是车轮圆周上任意位置需要重复进行A型检测次数,N越大,相邻两次检测声场重叠越多,检测越精细可靠,但检测速度越慢。
铁路车轮超声波B型检测的数据量是比较大的,特别是采用多个超声波探头的精细检测情况,例如周长为4 000 mm的铁路车轮,采用10个不同参数的超声波探头进行B型检测,车轮每转动1 mm周长进行一次A型检测,检测完毕每个探头都记录了4 000次A型数据。假设每次A型数据的长度为500个采样点,这样每个探头形成的B型图像为4 000×500像素,总共10幅图像,图像尺寸和数量都是比较大的,使得效率低下的人工缺陷信号处理已经无法满足检测要求,因此必须研究一种快速、高效的图像处理算法,提取缺陷信号区域并应用于铁路车轮超声波B型检测中。
2 基于区域生长的超声B型图像分割方法
针对铁路车轮超声波B型图像的缺陷处理,目标是获取缺陷信号区域,将B型图像中的缺陷信号区域从背景中分割出来,这就要用到图像分割[5]。图像分割就是把图像分成各具特征的区域并提取出感兴趣目标的技术和过程,在图像处理工程中占据重要的位置。图像分割方法可大致分为基于区域的方法、基于边缘的方法、区域与边缘相结合的方法,以及在此基础上的采用多分辨率图像处理理论的多尺度分割方法等。
2.1 算法基础
在众多的图像分割方法中,基于区域的方法中的区域生长法[6],在算法思想上,与现行的人工处理超声波B型图像的思想非常相似。
区域生长法的算法思想是将具有相似性质的像素集合起来构成区域,首先对每个需要分割的区域找出一个种子像素作为生长的起点,然后按照事先确定的生长准则来判定种子像素周围邻域中的像素,如果符合生长准则,则将邻域中的像素合并到种子像素所在的区域,否则舍弃邻域像素。新合并进区域的像素继续做种子向四周生长,直到没有满足条件的像素可以合并进来,生长过程结束,一个区域就生长而成了。现行的超声B型图像中,缺陷的反射信号一般表现为突出的颜色值,如256级灰度图,缺陷信号幅值越高,其颜色越亮,因此人工判定缺陷区域时,首先寻找B型图像上的突出颜色,相当于区域生长法中的种子像素,然后由里及外确定缺陷信号区域。由此看来,人工判断缺陷信号区域与区域生长法的思想非常相似,这就为区域生长法在铁路车轮超声波B型图像分割上的应用准备了条件。
在区域生长法的计算过程中,需要解决两个问题,一是确定种子像素,作为生长的起点;二是确定生长准则,也就是合并规则。由前面所述,缺陷信号会体现出突出的颜色值,因此选择B型图像中颜色值突出的像素作为种子像素,下面结合超声波B型图像的特点,详细介绍生长准则的确定。
2.2 超声B型图像的生长准则
区域生长法常用于图像的区域分割[7-8]上,选定了种子像素,确定了生长准则后,由种子像素向4邻域或8邻域像素扩展生长,这种生长方式是基于灰度图像的各向同性,向各个方向生长时采用统一的生长准则。而超声B型图像中每一列都是一次A型检测数据,相邻的两列是相邻位置的两次A型检测数据,正是因为超声B型图像在列方向(纵向)和行方向(横向)代表的含义不同,致使采用区域生长法进行超声B型图像分割时,在横向和纵向上需要采用不同的生长准则进行生长。
2.2.1 基于波谷阈值的纵向生长准则
超声B型图像在纵向上符合A型检测数据的特点,缺陷信号以波峰的形式体现(见图3,波峰的起点为b,终点为e),前面已经选定了B型图像中的颜色极值作为种子像素,也就是图3中的波峰峰值,纵向生长就是以波峰峰值为起点向两侧生长,直到波峰起点b和波峰终点e,停止生长,形成一个包含完整信息的波峰。
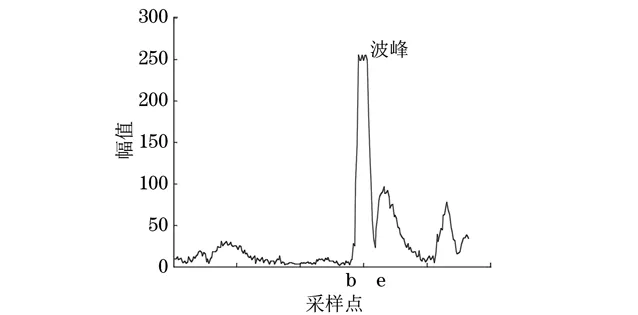
图3 B型图像中1列A型数据中的波峰信号
由此可见,纵向生长的终点是波峰的起点和终点,因此必须寻找波峰起点和终点的特征,归纳出生长的准则,才能开始生长过程。在超声A型数据中,波峰的起点和终点都符合波谷的特点,例如图3中的波峰终点e是一个很明显的波谷,其幅值小于相邻两侧数据点的幅值,由此可以推出波谷的判定关系式,波谷i的幅值f(i)满足:
(2)
考虑到超声波检测仪具备波形抑制功能,当打开抑制时,仪器会将低于一定幅度波形数据置为零,有可能将波峰的起点、终点以及背景杂波都置为零,此时波谷i的幅值f(i)满足以下两个关系式其中的一个:
(3)
(4)
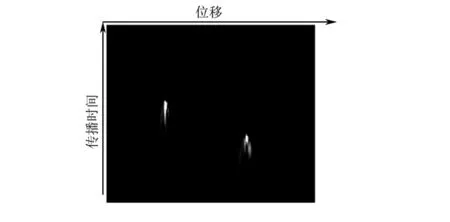
上述的关系式(2)~(4)中,满足其中任意一个,即可确定为波谷,但波谷不一定是波峰的起点或终点,如图3所示,波峰起点和终点的幅值都已经接近背景杂波,因此还需要附加一个阈值Tm来确定波峰的起点和终点;当波谷i的幅值f(i) 以上就是纵向生长的准则,基于波谷的特征和阈值的判定,生长的详细过程如下: (1) 以波峰峰值为种子像素,沿纵向向两侧生长。 (2) 根据关系式(2)~(4)判断邻域的像素点是否为波谷,如果不是波谷,则直接合并,继续生长;如果是波谷,则需要进一步根据阈值Tm判断波谷的幅值。当波谷的幅值不小于阈值Tm,则合并波谷像素,继续生长;当波谷幅值小于阈值Tm,则停止生长,纵向生长结束。 2.2.2 基于相关系数阈值的横向生长准则 超声B型图像相邻的两列代表了超声波探头在相邻位置对车轮进行的两次A型检测,试验证明:如果相邻的两次A型检测都包含同一缺陷的反射信号,则缺陷信号具有很强的相似性,而且这种相似性随着检测精细程度的提高而加强,也就是式(1)中的N越大,声场重叠越多,检测越精细,相似性也就越强,这是由于缺陷信号具有相对固定的性质。下面引入描述信号相似性的统计量相关系数[9-10],来描述横向相邻的缺陷信号的相似性,进而确定超声B型图像的横向生长准则。 设x(n),y(n)是两个能量有限的确定性信号,并考虑到实际工作中处理的都是有限长信号,所以假定信号x(n)序列长为N1,信号y(n)序列长为N2,则x(n)和y(n)的相关系数为: (5) 由于x(n)的长度为N1,因此令n>N1时x(n)为零,同理,令n+N2-m>N2时y(n+N2-m)为零。 实际操作时,可以取相关系数ρ(m)的最大值ρmax作为横向生长准则。根据检测试验的情况,取合适的相关系数阈值TC作为停止生长的条件,当ρmax (1) 以种子像素纵向生长得到的波峰作为横向生长的种子,向两侧生长。 (2) 利用纵向生长规则,得到种子波峰相邻的波峰。 (3) 根据式(5)求种子波峰和相邻波峰的相关系数ρ(m),求其最大值ρmax。当ρmax>TC时,合并相邻的波峰;当ρmax 铁路车轮超声波B型检测定制了一条包含人工模拟缺陷的轮对,车轮直径为1 050mm,以此作为检测对象,采用型号2.5P12mm×20mm的超声波双晶直探头从车轮踏面上入射,检测车轮内部不同深度的φ3mm横通孔。检测时采用摩擦轮驱动车轮转动,转速约为2r·min-1,超声波探头连接的超声波检测仪重复频率为1 000Hz,根据式(1)计算得到的重复次数N约为182次,车轮每转动0.11mm进行一次A型检测,声场重叠的范围很大,检测非常精细,这就为后面的缺陷信号横向生长准备了相似性条件。 图2是一定声程范围内的B型图像,在进行区域生长时,取图2中颜色最大值作为种子像素,纵向生长的阈值Tm取该列A型检测数据的均值,横向生长的阈值TC取0.7,对图2的B型检测数据进行区域生长法的图像分割,分割后的超声B型图像如图4所示。 图4 区域生长法分割后的铁路车轮超声B型图像 对比图2和图4可以看出,文中所提出的区域生长法,应用在铁路车轮超声波B型检测的图像分割上,有效地提取了缺陷信号区域,去除了图像中的噪声,保留了完整的缺陷信号,为后续进一步的缺陷区域处理准备了条件。 针对铁路车轮超声波检测的B型图像,采用图像分割方法,对检测图像中的缺陷区域进行分割和提取,根据超声波B型图像在纵向和横向的不同特点,改进了传统区域生长的图像分割方法;提出了在纵向上基于波谷阈值的生长准则,在横向上基于相关系数阈值的生长准则,并通过实际的铁路车轮超声波B型检测试验,取得了良好的缺陷信号区域分割效果。 [1] 刘宪,范军.机车轮箍和整体轮的超声波探伤[J].无损检测,2006,28(9):498-501. [2] 吴迪,刘逸军.前列腺肿瘤超声图像清晰化处理研究[J] .中国卫生标准管理, 2015(26):141-142. [3] 李金冬,郑政.浅表组织超声图像的均衡化处理[J].中国生物医学工程学报,2013, 32(2):191-196. [4] 中国机械工程学会无损检测分会.超声波检测[M].北京:机械工业出版社,2000. [5] RAFAEL C G, RICHARD E W.数字图像处理[M].北京:电子工业出版社,2011. [6] SUJATHA G S, KUMARI V. An innovative moving object detection and tracking system by using modified region growing algorithm[J]. Signal & Image Processing: An International Journal(SIPIJ), 2016, 4(7):39-55. [7] 彭智浩,杨风暴,王志社,等.基于数学形态学和自动区域生长的红外目标提取[J].红外技术, 2014, 36(1):47-52. [8] QIN A K, DAVID A C. Multivariate image segmentation using semantic region growing with adaptive edge penalty [J].IEEE Transactions on Image Processing, 2010,8(19):2157-2170. [9] 胡广书.数字信号处理-理论、算法与实现[M].北京:清华大学出版社,2012. [10] 任明照,黄永巍,高东海.基于多幅连续相关法的超声检测信号的缺陷识别技术[J] .无损检测,2012,34(4):38-41. Image Segmentation Method in Ultrasonic B-scan for Railway Wheels REN Mingzhao, GAO Donghai, ZHENG Yunxian (Metals and Chemistry Research Institute, China Academy of Railway Sciences, Beijing 100081, China) In the ultrasonic B-scan inspection for railway wheels, defection region is to be isolated from the B-scan image on the basis of image segmentation. According to the deferent features of B-scan image at vertical and horizontal directions, a new method is introduced in this paper to solve the B-scan image segmentation as a result of improving the traditional region growing method. In the new method, the pixels with maximal color value are picked out as the seed pixels, and then different growing principles are used in the region growing method at vertical and horizontal directions, in which the principle of wave valley threshold is used at the vertical direction, and the principle of correlation coefficient threshold is used at the horizontal direction. By the experiments of ultrasonic B-san for railway wheels, it shows that the new region growing method behaves well and acquires a satisfied result of defection region segmentation. railway wheel; ultrasonic B-scan; image segmentation; region growing 2016-10-10 中国铁道科学研究院院基金资助项目“机车小修时车轮顶轮探伤系统的研制”( 2014YJ061) 任明照(1979-),男,副研究员,硕士,主要从事铁路无损检测信号处理技术和软件研发工作 任明照, arrenah@gmail.com 10.11973/wsjc201707002 TG115.28 A 1000-6656(2017)07-0008-043 算法实例
4 结语
