动力定位噪声对全景扫描声呐干扰的特性分析
2017-08-31何先忠许枫
何先忠,许枫
(1.中国科学院 声学研究所,北京100190; 2.中国科学院大学,北京 100190)
动力定位噪声对全景扫描声呐干扰的特性分析
何先忠1,2,许枫1
(1.中国科学院 声学研究所,北京100190; 2.中国科学院大学,北京 100190)
在浅海的工作环境下,船舶或海上作业平台的动力定位噪声严重地干扰全景扫描声呐的声图。目前的各种干扰抵消技术实际效果不理想,动力定位状态下其对全景扫描声呐的信号检测能力提高有限。本文提出通过收放全景扫描声呐的铠装电缆恢复被掩盖了的目标信号的方法,计算了动力定位螺旋桨噪声干扰的直达波和海底反射波到达接收阵的入射角;仿真分析了接收阵入水深度对螺旋桨噪声干扰的直达波和多途影响,以及引起的盲区方位变化情况;仿真结果表明可提高全景扫描声呐的探测能力,为全景扫描声呐设计者采取相应的信号处理算法来抑制动力定位噪声的干扰提供了依据。
全景扫描声呐; 动力定位; 螺旋浆噪声; 声图;干扰;接收阵;铠装电缆
随着造船工业和自动控制技术的进步,船舶的动力定位技术逐步成熟,并且开始在一些实际船舶或者海上平台中得到了应用[1-3]。带有动力定位系统的船舶或海上平台主要应用于浅海中的定点作业,作业时一般用全景扫描声呐观察水体中或海底的情况。尽管船舶的动力定位系统有许多优点,但是动力定位系统工作时多个螺旋桨旋转所产生的噪声严重地干扰了全景扫描声呐的声图,形成大范围的探测盲区,同时还影响其他区域的目标探测能力[4-5]。国内外学者尝试利用多种方法抑制这种噪声,如自适应噪声抵消[6-7]、自适应波束形成、后置波束形成干扰抵消[8-9]和逆波束形成等方法,但是这些干扰抵消技术实际效果不理想,对动力定位状态下的全景扫描声呐的信号检测能力提高十分有限。本文讨论在浅海中动力定位噪声对全景扫描声呐的干扰,分析了动力定位噪声的多径传播,这种干扰和接收阵入水深度的关系,提出通过收放全景扫描声呐的铠装电缆恢复曾被盲区掩盖了的目标信号的方法,可提高全景扫描声呐对目标的探测能力。
1 动力定位噪声的干扰
一般地带有动力定位系统的船舶,船艏有侧推,船艉有艉推。动力定位时船舶在海面保持固定的位置和艏舟向以利于进行水下作业。水下作业时用全景扫描声呐观察水下的地形地貌和作业情况,全景扫描声呐的湿端用铠装电缆吊放悬挂在船舶中部的左舷或右舷。海上作业平台中动力定位螺旋桨一般分布在平台的周围。带有动力定位系统的船舶或海上作业平台通常有多个螺旋桨,如981海洋石油钻井平台有8个动力定位螺旋桨。使用的全景扫描声呐的工作频率为100 kHz,湿端的接收换能器是由4条直线换能器阵围成的正方形,每一条直线阵中有96个相邻间距为半波长的阵元,通过对这4条接收换能器进行电子切换来实现全景扫描的功能。
图1是在有动力定位时全景扫描声呐获得的声图,当时作业海区水深63 m,三级海况下,全景扫描声呐的湿端入水26 m。从图1中可以看出:在动力定位情况下全景扫描声呐的声图比较粗糙,主要是因为动力定位噪声干扰很强,这种强干扰通过波束的副瓣干扰了声图的目标信号,从而使声图变得模糊;另一方面,图1中的声图出现了许多圆弧,这是因为波束的主旁瓣比一定,强的动力定位噪声干扰在波束的旁瓣方向产生了比较大的响应。由此可见,动力定位噪声干扰严重地降低了全景扫描声呐探测目标的能力。
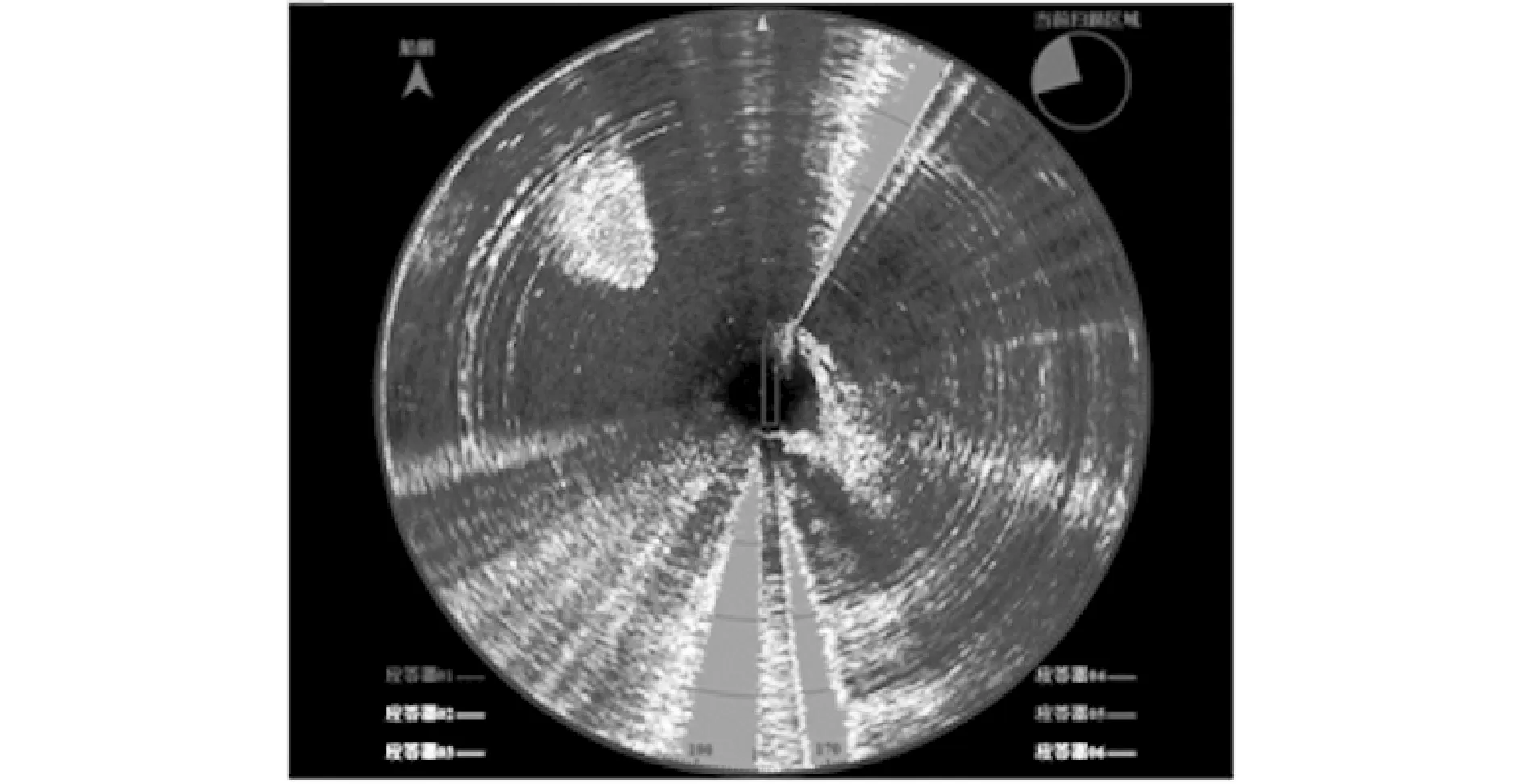
图1 有动力定位时的声图Fig.1 Sonar image with dynamic positioning
图1中的声图出现了3道强干扰,造成3个探测盲区,关闭动力定位系统,这3道强干扰消失,又可以探测海底的地形地貌,所以这是由动力定位的螺旋桨旋转而引起的强干扰。
2 动力定位螺旋桨噪声分析
为了方便分析,只考虑动力定位的一个螺旋桨噪声和一条直线阵的情况,图2是动力定位螺旋桨噪声产生干扰的示意图,假设接收直线阵的阵元数为N,相邻阵元间距为工作频率f的声波的半波长,接收直线阵长度为l,螺旋桨到接收阵的水平直线距离为r,动力定位螺旋桨的直达波和接收阵L端所在水平线的夹角为θ,和接收阵R端所在水平线的夹角为β,动力定位螺旋桨入水深度为h,接收阵在动力定位螺旋桨下方垂直距离为u,接收阵到海底的垂直距离为d。在浅海环境中,动力定位螺旋桨噪声可能通过海底和海面反射或折射等多径到达接收阵。利用基于射线理论的声场计算软件BELLHOP,根据海洋环境参数和基阵几何参数可以比较准确地计算出到达接收阵的声场,但是全景扫描声呐的工作频率100 kHz对应的声波波长为15 mm,如果基阵定位参数有几毫米的误差,那么计算出来的声场可能与实际的声场差距较大,因此严格计算声场没有实际意义。
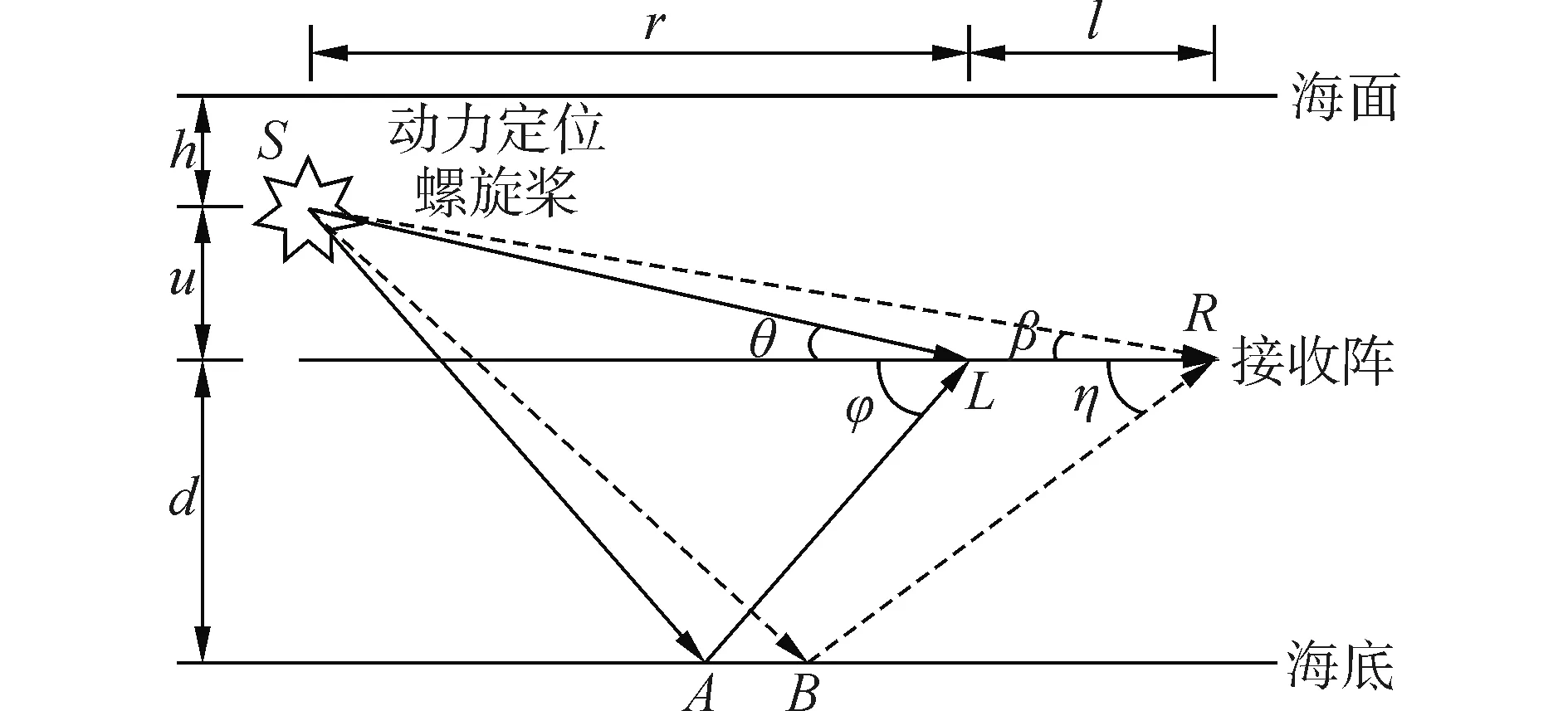
图2 动力定位螺旋桨噪声产生的干扰Fig.2 The interference of noise caused by dynamic positioning
在等声速的假设下,动力定位螺旋桨噪声直达波到达接收阵两端L和R的入射角分别为θ和β,经过平坦的海底反射动力定位螺旋桨噪声到达接收阵两端L和R的入射角分别是φ和η,如果海底是凹凸不平,那么反射波的入射角就会扩展到[η,φ]以外。实际上,反射波的强度与海底底质有关,而且声线的传播路径还和声速剖面有关[5]。
根据直达波、反射波和直线阵的几何关系,很容易证明θ、β、φ和η的计算公式为
式中:在动力定位系统工作时,h=3 m,如果u=10 m,r=30 m,那么θ=18.4°,β=17.9;当d=20 m,接收阵阵长l=0.7 125 m时,φ=59.1°,η=58.4。
3 动力定位噪声干扰的仿真分析
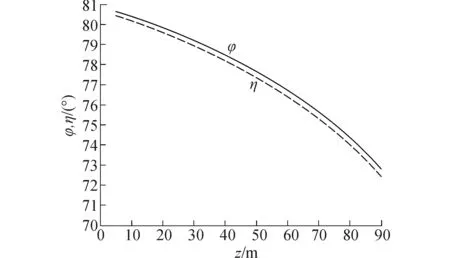
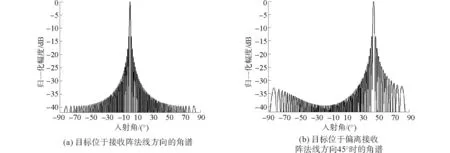
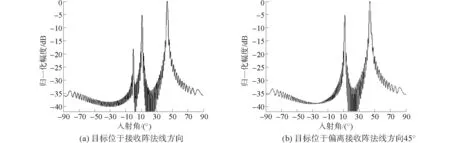
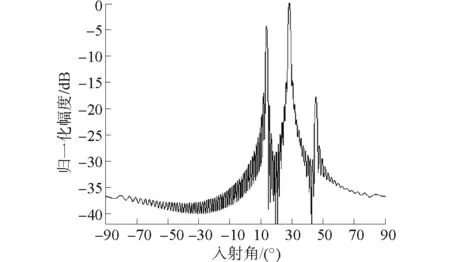
为了分析动力定位螺旋桨噪声对全景扫描声呐的干扰作用,以一艘带有动力定位系统和全景扫描声呐的实际船舶为例进行仿真,仿真的参数为:动力定位螺旋桨入水深度:h=3 m;接收阵参数:f=100 kHz,N=96,l=0.712 5 m;螺旋桨到接收阵的水平距离:r=30 m;接收阵至动力定位螺旋桨的垂直距离:2 下面对仿真的一些结果进行分析: 1)动力定位螺旋桨噪声直达波引起的干扰影响入射角5°~70°的目标探测。当全景扫描声呐的湿端接收阵入水深度z不同时,干扰直达波的入射角相应地发生变化,如图3所示。 当z增加时,干扰直达波的入射角变大,所引起的盲区方位相应地发生变化,盲区范围有所变大,但变化不明显。根据这一仿真结果,可以通过收放吊装全景扫描声呐湿端的铠装电缆使接收阵的入水深度不同而使干扰直达波引起的盲区的方位发生变化,并且盲区范围变化不大,从而检测出曾被盲区掩盖了的目标信号。 2) 动力定位螺旋桨噪声海底反射波引起的干扰影响入射角72°~81°的目标探测。当全景扫描声呐的湿端接收阵入水深度z不同时,干扰海底反射波对于接收换能器的入射角也相应地发生变化,如图4所示,当z增加时,干扰海底反射波的入射角变小,但干扰引起的盲区宽度范围不变。 根据这一仿真结果,可以通过收放吊装全景扫描声呐湿端的铠装电缆使接收阵的入水深度不同而改变干扰海底反射波引起的盲区的方位,并且盲区宽度几乎不变,从而检测出被干扰海底反射波引起的盲区掩盖了的目标信号。 3)动力定位螺旋桨噪声的直达波和海底反射波干扰会在全景扫描声呐的声图中形成盲区。从图3和图4可以看出动力定位螺旋桨噪声的直达波和海底反射波引起的盲区可以分布在90°扇面的范围内,它们会严重地影响目标信号的检测性能。 图3 动力定位螺旋桨噪声直达波的入射角Fig.3 The incident angle of the direct wave caused by the propeller noise 图4 动力定位螺旋桨噪声海底反射波的入射角Fig.4 The incident angle of the seabed reflected wave caused by the propeller noise 图5是没有动力定位螺旋桨噪声干扰时接收阵接收到的信号的角谱,图5(a)目标出现在接收阵法线(0°)方向和图5(b)目标偏离法线(45°)方向时可以清晰地辨别。 图5 无动力定位螺旋浆噪声干扰时目标的角谱Fig.5 Angular spectrum of the target without the interference of noise caused by dynamic positioning 图6是当z=35 m有动力定位螺旋桨噪声干扰时接收阵接收到的信号的角谱,图6(a)目标出现在接收阵法线(0°)方向时可以清晰地辨别,但是当目标出现在偏离法线(45°)方向时,接收阵接收到的信号的角谱如图6(b),在45°附近有强干扰盲区,不能分辨出目标信号。 图6 z=35 m,有动力定位螺旋桨噪声时接收到的信号的角谱Fig.6 Angular spectrum of a signal received under the interference of the propeller noise caused by dynamic positioning when z=35 m 如果放出铠装电缆将全景扫描声呐的湿端放深,当z=60 m有动力定位螺旋桨噪声干扰时接收阵接收到的信号的角谱如图7所示,可看出在图6(b)中位于45°方向曾被动力定位噪声干扰淹没了的目标信号又出现了,远离盲区,清晰可辨。 图7 z=60 m,有动力定位螺旋桨噪声时接收到的信号的角谱Fig.7 Angular spectrum of a signal received under the interference of the propeller noise caused by dynamic positioning when z=60 m 1)动力定位螺旋桨噪声对全景扫描声呐产生的干扰除了直达波外还有海底反射的多途,多途的存在使动力定位噪声对全景扫描声呐的干扰变得复杂; 2)全景扫描声呐的湿端入水深度不同会引起动力定位噪声的直达波和多途干扰而引起的探测盲区方位发生变化,因此收放全景扫描声呐的铠装电缆可以改变盲区的方位,从而使原来探测盲区中的目标信号又变得清晰可见; 3)本文对一个动力定位螺旋桨噪声干扰一条接收直线阵的计算和仿真分析可以推广到实际的动力定位船舶或海上作业平台多个螺旋桨噪声干扰接收阵的情况,认识到实际系统中动力定位噪声对全景扫描声呐声图的干扰规律,将有利于采取相应的信号处理技术来抑制这种干扰,从而提高了在动力定位船舶或海上作业平台上全景扫描声呐的探测目标的能力。 [1]赵志高,杨建民,王磊,等. 动力定位系统发展状况及研究方法[J]. 海洋工程,2012,20(1):91-97. ZHAO Zhigao, YANG Jianmin, WANG Lei, et al.Development status and research method of dynamic positioning system[J]. Oceanographic engineering, 2012,20(1):91-97. [2]LIU Lu, WANG Dan, PENG Zhonghua. Cooperative dynamic positioning of multiple offshore vessels with persistent ocean disturbances via iterative learning[C]∥Proceedings of the 33rd Chinese Control Conference. Nanjing, China, 2014:28-30. [3]HU Xin, DU Jialu, XU Dayu, et al. Robust nonlinear control for dynamic positioning system of ships based on disturbance observer[C]∥Proceeding of the 11th World Congress on Intelligent Control and Automation. Shengyang, China, 2014. [4]杨波,卜应勇,赵海明.基于信号稀疏分解水下回声提取的特性[J].声学学报, 2012, 31(2): 202-210. YANG Bo, BU Yinyong, ZHAO Haiming. Features of underwater echo extraction based on signal sparse decomposition[J]. Chinese journal of acoustics, 2012, 31(2): 202-210. [5]陈艳,汤卫林,范伟. 用几何声学方法计算在浅水波导中掩埋目标的回声[J].声学学报, 2012, 31(1): 73-86. CHEN Yan, TANG Weilin, FAN Wei. The geometrical acoustic method for calculating the echo of targets submerged in a shallow water waveguide[J]. Journal of acoustics, 2012, 31(1): 73-86. [6]HODGKISS W. Source ship contamination removal in a broadband vertical array experiment[C]∥Proceeding Oceans′88 on A Partnership of Marine Interests. Boltimore, Morgland, 1988: 310-314. [7]CANDY J V, SULLIVAN E J. Canceling ship noise using an adaptive model-based approach[C]∥Proceeding OES Eighth Working Conference on Current Measurement Technology. Chorleston SC, USA, 2005: 14-18. [8]GODARA L C. A robust adaptive array processor[J]. IEEE Trans. Circuits Syst, 1987, 34(7): 721-730. [9]GODARA L C. Post beamformer interference canceller with improved performance[J]. Journal of the acoustical society of America, 1989, 85(1): 202-213. 本文引用格式: 何先忠, 许枫. 动力定位噪声对全景扫描声呐中干扰的特性分析[J]. 哈尔滨工程大学学报, 2017, 38(7): 1031-1034, 1064. HE Xianzhong, XU Feng. Characteristics of dynamic positioning noises interference to panoramic scanning sonar[J]. Journal of Harbin Engineering University, 2017, 38(7): 1031-1034, 1064. Characteristics of dynamic positioning noises interference to panoramic scanning sonar HE Xianzhong1,2, XU Feng1 (1.Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China; 2.University of Chinese Academy of Sciences, Beijing 100190, China) Under a shallow-water working environment, the dynamic positioning noises coming from ships or offshore platforms seriously interfere with the acoustic images obtained from the panoramic scanning sonar. The actual effects of all kinds of interference counteraction technologies are not ideal, and their abilities to improve the signal detection abilities of the panoramic scanning sonar under the state of dynamic positioning remain limited. In this paper, we calculated the interfered incident angles, which were formed by the direct wave and/or bottom reflection originated from the noises of the dynamic positioning propeller. The simulation analysis indicated that blind ranges caused by direct wave and multipath changed due to the changing depth of the receiving array in water. These findings suggest that changing the retractable armored cable can eliminate the blind spot and improve the detection sensibility of the panoramic scanning sonar. The results provide a theoretical basis that can allow panoramic scanning sonar researchers to design technologies that can suppress the interference of dynamic positioning noise. panoramic scanning sonar; dynamic positioning; propeller noise; sonar image; interference; receiving array; armored cable 2016-04-17. 日期:2017-04-27. 国家自然科学基金项目(61471353). 何先忠(1969-),男,副研究员; 许枫(1969-),男,研究员,博士生导师. 许枫,E-mail:xf@mail.ioa.ac.cn. 10.11990/jheu.201604047 TN911.7 A 1006-7043(2017)07-1031-05 网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170427.1413.052.html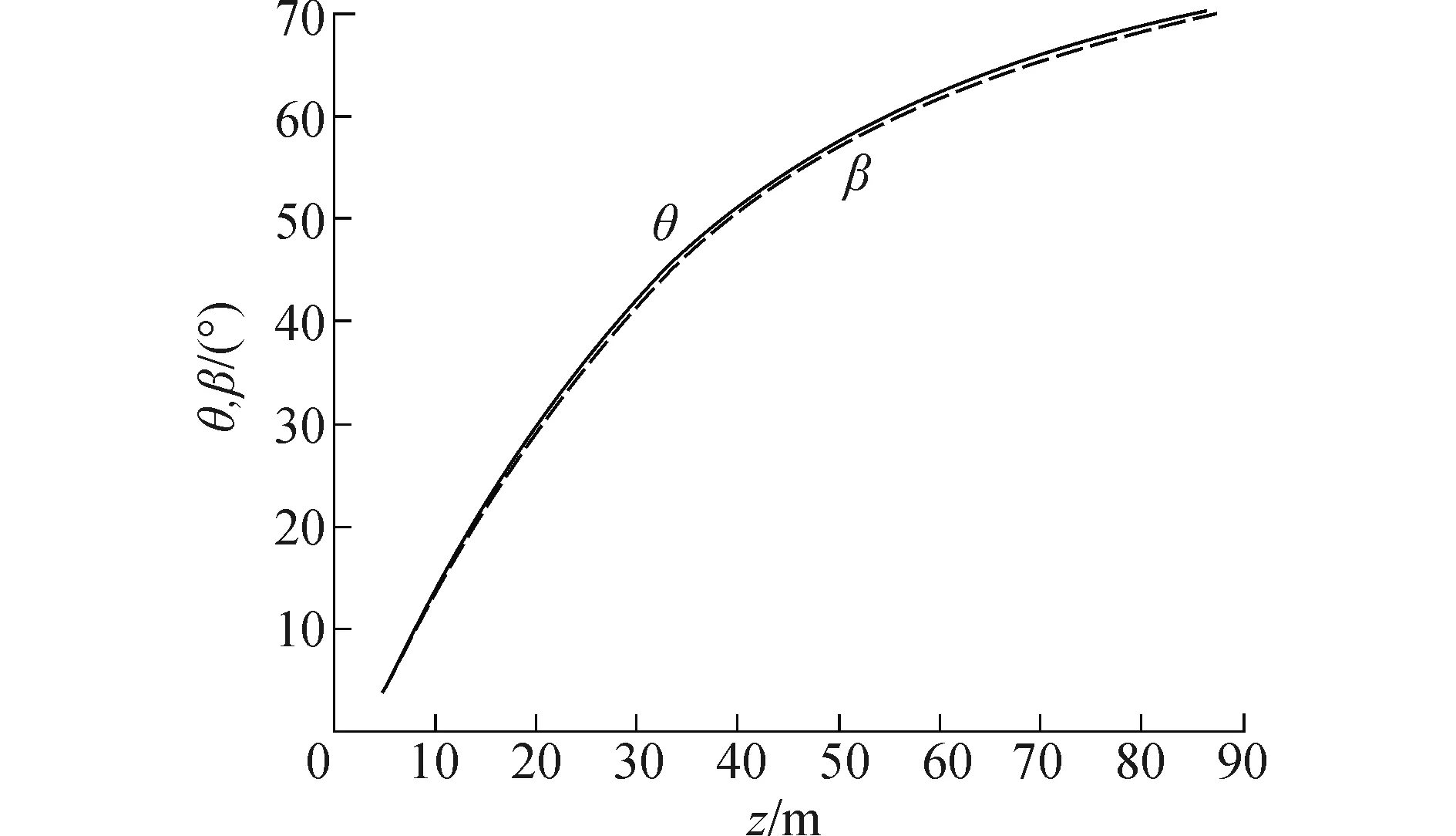
4 结论
