混合动力新船舶Z源电力推进系统
2017-08-31甘世红顾伟褚建新王家毅高迪驹
甘世红,顾伟,褚建新,王家毅,高迪驹
(1.上海海事大学 商船学院,上海 201306; 2.上海海事大学 科学研究院,上海 201306)
混合动力新船舶Z源电力推进系统
甘世红1,顾伟2,褚建新2,王家毅1,高迪驹1
(1.上海海事大学 商船学院,上海 201306; 2.上海海事大学 科学研究院,上海 201306)
为了解决船舶排放的废弃物对环境的污染问题,提出以光伏电池为主电源超级电容作为辅助电源的混合动力的新能源船舶,其电力推进逆变器采用新型Z源逆变器。研究了这种混合动力船舶推进系统的工作原理和控制策略,推导了Z源逆变器的小信号模型,采用双环控制器维持直流链电压稳定,给出了控制器的设计方法,研究了Z源逆变器稳定性问题。采用三层的BP神经网络预测光伏电池的输出功率,通过控制直通占空比和调制因子来控制光伏电池和超级电容的输出功率,最后进行了仿真和试验。从仿真及试验结果可以看出,在船舶运行时,光伏电池提供平均功率,超级电容提供瞬态功率且还吸收制动功率,从而验证了理论的正确性。
混合动力; 新能源; 船舶; 电力推进; Z源逆变器; 控制策略; BP神经网络; 光伏电池
随着全球经济的持续发展,船舶排放的废弃物对环境的污染日趋严重,国际海事组织(IMO)以及越来越多的国家正积极采取各种有效措施以减少船舶排放对大气的污染,积极开发和采用节能新船型和先进动力系统[1-2]。
电力推进是一种先进的船舶推进方式,其核心是推进逆变器。但传统推进逆变器不同时具有升降压功能,彭方正提出了Z源逆变器[3-4]可以实现两级功率变换的升降压功能,非常适应新能源电压变化范围大的情况,所以在电动汽车[5-6]、新能源发电[7-8]、电机驱动[9-10]等领域有非常重要的应用价值。但传统的Z源逆变器也有一定的缺陷,如升压能力有限、起动电流大等。为此国内外学者对Z源逆变器的电路拓扑优化[11-13]和调制策略[14]进行了研究,以完善Z源逆变器的性能。
由于存在两种能源混合供电模式,高效合理的能量分配是混合动力船舶动力系统控制的核心。国内外学者在混合动力汽车和火车的整车优化及能量管理方面做了大量的研究[15]。但在混合动力船舶技术目前尚处在不断探索和研究的阶段,国外有不少科研机构提出了一些相关理论和方法, 并在军用舰艇和民用船舶领域有所实现,澳洲复合船能源专家Doctor Robert Dane 于2001 年开发了世界第一艘太阳能/风帆复合型船舶,德国Planet Solar 公司建造了世界上最大的太阳能动力船,并于2010年实现了环球航行。国内在混合动力船舶领域方面的研究起步较晚,成功应用的例子并不多,以光伏电池和超级电容作为能源的混合动力电力推进船舶方面的研究几乎是空白。
本论文将一种新型的Z源变流器应用到混合能源动力船舶推进系统中,以光伏电池组作为船舶电力推进系统的主电源、以超级电容作为辅助电源,二者共同为推进电动机供电来驱动船舶。
1 系统结构及升降压原理
混合动力船舶新型Z源电力推进系统的控制原理框图如图1所示。
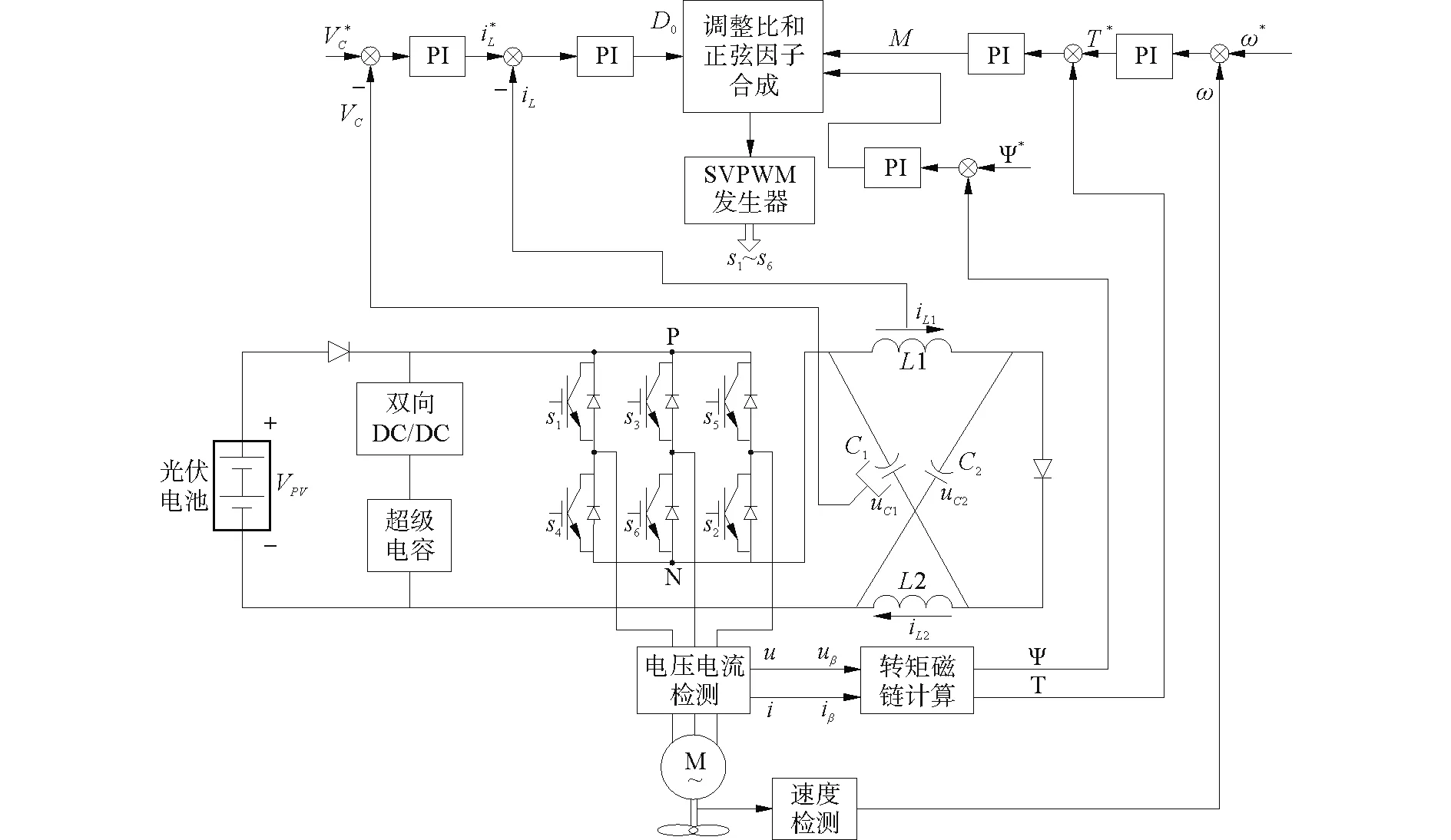
图1 系统控制原理图Fig.1 System control schematic diagram

图2是Z源等效电路,L0为电机等效直流电感,R0为电机等效直流电阻,当系统正常工作时,Z源变换器只有2种工作状态,即直通状态和非直通状态,在直通状态时,等效电路如图2(a)所示。
(1)
式中:VL为电感电压;VPN为直流链电压;非直通状态如图2(b)所示,可得
(2)
稳态时,一个周期电感平均电压为0,所以:
(3)
式中:T为开关周期;T0为直通时间。由式(3)得
(4)
式中:D0=T0/T为直通占空比,相比传统拓扑,新型拓扑的Z源逆变器电压应力能大大减小[1],直流链峰值电压可为
(5)
式中:B为升压因子,所以输出的正弦波调制电压峰值为
(6)
式中:M为正弦脉宽调制因子。所以逆变器升降压由M与B的乘积决定,通过合适的M与B可实现升降压功能。
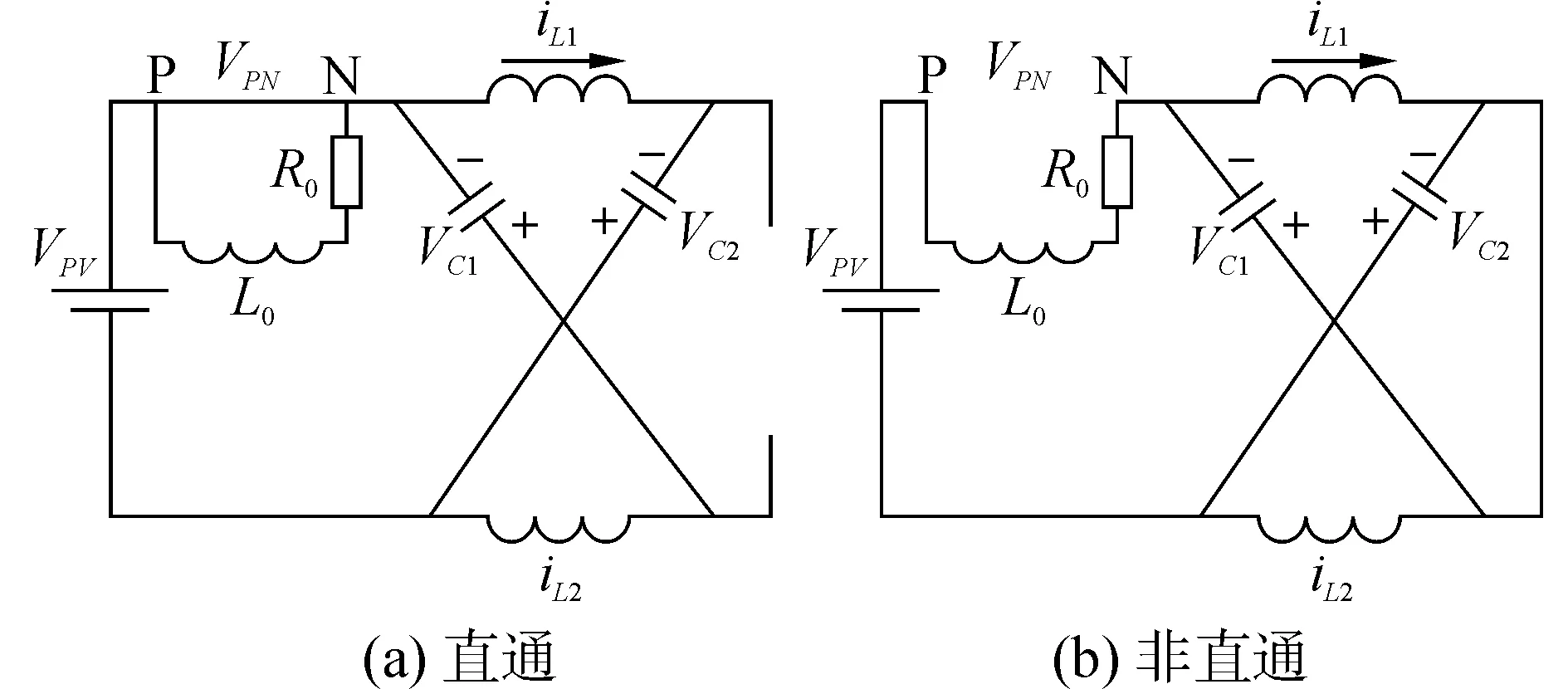
图2 Z源逆变器等效电路Fig.2 Z-source inverter equivalent circuit
2 系统的控制策略
2.1 直流侧电容电压控制
对于图2所示的电路,取电容电压uC、电感电流iL、负载电流i0为状态变量,直通时占空比为d0,由在此开关状态下的等效电路图2(a),得其状态空间方程为
(7)
非直通状态下,占空比为1-d0,由在此开关状态下的等效电路图2(b),得其状态方程为
(8)
将两个状态方程(7)、(8)平均,可得到一个开关周期平均状态方程:
(9)
假设状态变量可表示为直流稳态变量与小信号分量之和,即
(10)

(11)
由式(11)可以推导出小信号模型Z源电容电压对直通占空比的传递函数Gud(s)为
(1-2D0)L0+LR0(I0-2IL)-(VPV-2VC)L]s+
(2VC+VPV)(1-2D0)R0}/G(s)
(12)
电感电流对直流占空比的传递函数Gid(s):
(13)
式中:G(s)=CLL0s3+CLR0s2+[2L(1-D0)2+
L0(1-2D0)2]s+(1-2D0)2R0。
Gud(s) 对控制系统的设计有重要影响,对Gud(s)分析发现,该传递函数中存在一个右半平面零点,属于非最小相位系统,为减少非最小相位对系统的影响,提高系统的动态响应,可以通过选择Z源网络的参数,使右半平面的零点尽可能的远离虚轴,减小右平面零点对系统的影响,同时采用电流内环控制和电压外环控制的双闭环控制。直流链电压的稳定对逆变器的输出交流电压稳定有直接的影响,但直流链电压由于存在直通零电压,使方波信号给直流链电压的检测和反馈带来很大麻烦,所以通过控制电容电压间接控制直流链电压稳定,双环控制电路如图3所示。

图3 Z源电容电压双环控制Fig.3 Capacitor voltage double-loop control
图3中,Gud(s)、Gid(s)如式(12)、(13),电压环输出作为电感电流的给定,内环是电感电流环,GM(s)为直通占空比和调制信号的传递函数:
(14)
式中Vtri为三角载波信号的幅值。
图3中,电流内环的开环传递函数和电压外环的开环传递函数为
(15)
(16)
式中:Gic为内环电流调节器,其目的为了保证电流的快速响应;Gvc为外环电压调节器,其目的为了保证电容电压稳定。电流、电压调节器方程为:
(17)
为了保证闭环控制系统具有足够的相位裕度和幅值裕度,可以分别选择2个闭环的剪切频率wc和相位裕度q,控制器的wz和wp可表示为[15]
(18)
控制器的放大倍数为
(19)
根据仿真,电流环的剪切频率选择为开关频率的1/10,即1 kHz, 电流控制器的K0=4.5,wz=1 950,wp=20 000;电压环的剪切频率为100 Hz,电流控制器的K0=40,wz=140,wp=2 900,此时双闭环控制系统有65°的相位裕度和14.7 dB的幅值裕度,表明系统的有足够的稳定性。
2.2 交流侧推进电机控制
将空间矢量调制和传统的直接转矩控制(direct torque control,DTC)结合起来获得恒定的开关频率来驱动推进电机,如图1所示。当船舶启动时,速度较低时,Z源逆变器工作在低频区,电机需要的电压较低,直流链电压不需升压,所以Z源逆变器不需要直通零状态,直流链电最大值保持在较低水平,通过调整Z源逆变器调制因子M,使其逐渐增大来使电机逐渐升压;在船速较高时,Z源逆变器工作在高频段,当直流链电压最大值不足以得到所需的交流电压时,引入直通零状态,调整直通占空比D0使直流链电压最大值随输出交流电压的变化而变化,此时保证逆变器调制因子M为一恒值。通过协调计算后,求得用于控制的直流链电压最大给定值和逆变器调制因子值,然后通过这2个值分别得到控制直通信号和非直通状态时Z源逆变器的驱动信号。整个推进系统控制框图如图1所示,直流侧产生的直通信号D0和交流侧产生的PWM信号合成,送至驱动电路产生驱动信号驱动Z源逆变器。
3 混合动力船舶能量控制策略
能量控制策略的总体目标是尽可能提高船舶动力系统的效率,控制策略的原则是:1)光伏电池组运行在最大功率点附近;2)保持推进电机工作在高效率区;3)维持超级电容荷电状态(SOC)在一定的范围,避免过度的充放电导致超级电容效率降低,在船舶航行中及时回收制动时的能量,超级电容SOC的控制采用门限电平法,设置超级电容的最低门限值SOCL和最高门限值为SOCH,船舶正常航行时,超级电容的SOC维持在SOCL与SOCH之间。
混合动力船舶运行时有4种工作状态:1)船舶需要功率适中时,由光伏电池提供船舶需要的平均功率,且超级电容SOC
系统进入哪种工况由整船能量控制器依据驾驶员的指令、天气状况、当前船速和超级电容SOC来判断。
推进电机的需求功率随时在变化,光伏电池的输出功率可表示为
PPV=VPVIPV
(20)
在一定的光照和温度下,光伏电池的V-I特性就确定了,所以当控制光伏电池的输出电压VPV,即双向DC/DC变换器的输出电压就控制了光伏电池的输出功率和电流。
同时,通过控制直通占空比和调制因子就可以得到逆变器的期望输出电压vo,从而控制了逆变器的输出功率,输出功率为
(21)
式中:Im是负载电流,cosφ是负载功率因数。所以超级电容的充放电功率为
(22)
混合能量控制系统有3大功能模块构成,分别是动态检测模块、状态控制模块和协调控制模块。由于光伏发电的特殊性,混合能量控制的核心便是减弱光伏电池的动态过程。光伏电池自身机理及响应的滞后性决定了输出功率不适应频繁变化,所以光伏电池提供负载平均功率,故根据当前的天气状况、船舶当前状态等信息对光伏电池输出功率进行预测,可在电动机系统功率变化时提前调节Z源逆变器。
光伏电池是一个多输入多输出非线性复杂的系统,而神经网络具有很强的非线性映射能力,可以映射任意非线性系统,本文采用三层BP网络对光伏电池的输出功率进行预测。按天气建立了晴天、多云、阴天和雨天4个预测子模型,如图4所示。模型的输入变量有5个,分别是天气类型G(t+1),分别对应晴天、多云、阴天和雨天,t时刻的输出功率P(t),光照强度S(t+1),当前温度T(t+1),时间L(t+1),输出是6∶00~18∶00的12个时间点的预测功率P1(t+1)…P12(t+1),预测表达式为P(t+1)=f[G(t+1),P(t),S(t+1),L(t+1),T(t+1)]
(23)

图4 光伏电池功率预测网络Fig.4 Predictive network of PV cell power
首先以光伏电池的典型输入输出数据作为样本,训练具有一定精度的神经网络模型,使神经网络输出P(t+1)尽量逼近光伏电池的实际输出P。BP网络采用非线性Sigmoid函数,输出被限定在[0,1],而期望输出往往不在此区间,所以输入输出数据必须进行归一化处理。
基于以上的神经网络模型,预测控制器结构如图5所示,Pd为期望输出,P(t+1)为实际输出,U(t)为控制量,PR(t+1)为神经网络预测输出,可从当前系统信息中预测出未来I步的输出PR(t+I),误差函数E(t+1)反馈给性能指标函数J,利用预测控制器求出优化的控制量U(t)。

图5 预测控制系统结构Fig.5 Predictive control system structure diagram
4 混合动力船舶仿真和试验
4.1 仿真分析
为了验证以上原理和控制策略的正确性,对图1所示混合动力船舶,利用Matlab/Simulink平台构建仿真模型, Z源逆变器采用三次谐波注入升压控制,仿真参数如下:Z源网络:L1=L2=4 mH,C1=C2=500 mF,开关频率:10 kHz。
假设光伏电池的输出电压VPV=160 V,当D0=0.311,M=0.861, 由式(4)、(5)、(6)可以算出稳态时,VC=130.5 V,VPN=420 V,vo=180 V。
图6是仿真曲线,其中图6(a)是采用新型Z源逆变器的仿真曲线,图6(b)是传统Z源逆变器的仿真曲线。可以看出VPN稳态时被升压到420 V时,新型Z源电容电压逐渐上升,最终稳定在VC=130 V;而传统的Z源逆变器的电容电压在电源接通瞬间马上充电到90 V左右,然后上升最终充电到VC=290 V,而电感电流冲击也远远大于新型Z源逆变器,所以传统的Z源逆变器启动初期的电压电流冲击很可能损坏逆变器,进一步验证了理论分析的正确性。
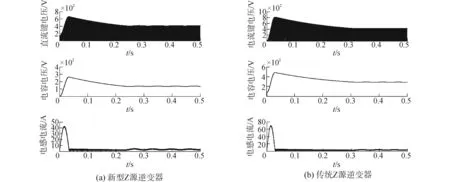
图6 Z源逆变器的仿真曲线仿真曲线Fig.6 Z-source inverter simulation curves
图7是推进电机负载变化时,逆变器输出电流i、电容电压VC的变化曲线,由于采用电容电压闭环控制,电容电压维持在给定值附近。

图7 逆变器电容电压、输出电流变化曲线Fig.7 Curves of capacitor and inverter output current
在此基础上,进一步对混合动力船舶运行工况进行仿真,仿真参数如下:
1)超级电容额定容量1 000 F,等效电阻0.31 mΩ;
2)推进电机采用鼠笼电机,UN=380 V,PN=3 kW,转动惯量Jm=0.201 kg·m2。
图8(a)是电机速度曲线,0~0.5 s时电机带额定负载起动;0.45~1 s时,电机在800 r/min速度下带额定负载稳定运行;1~2 s电机以120%TN进行过载运行;2~3 s,电机进行再生制动,速度逐渐降低到0。图8(b)、(c)是当混合动力船舶工作在不同模式下的光伏电池和超级电容输出功率曲线,由图可以看出,光伏电池提供船舶的额定功率,而超级电容在加速状态下提供瞬态的峰值功率,过载时提供过载部分功率,同时当船舶制动时,还吸收制动功率。8(d)是超级电容的SOC曲线,从响应曲线可以看出,0~0.45 s时,峰值加速功率由超级电容提供,超级电容的SOC逐渐下降,混合动力船舶工作在工况2;0.5~1 s时4电机带额定负载在800 r/min速度下稳定运行,超级电容不提供电流,额定功率都由光伏电池提供,超级电容的SOC维持不变,混合动力船舶工作在工况1;1~2 s电机在800 r/min速度下,带120%TN负载进行运行,额定功率仍由光伏电池提供,而超级电容提供过载功率,混合动力船舶工作在工况4;2~3 s,电机减速进行再生制动,制动能量回馈给超级电容,同时光伏电池也对超级电容充电,混合动力船舶工作在工况3,超级电容的SOC逐渐上升。
4.2 试验验证
构造了8 kW的试验电路,试验电路参数采用仿真电路参数。图9是电容电压uC、直流链电压VPN、电动机线电压uab的波形,由图可以看出稳态时,电容电压uC、直流链电压VPN与图6(a)仿真波形基本一致。
当负载功率开始是3 kW,10 s后突变到5 kW,30 s后减少到0.5 kW,45 s又回到3 kW,光伏电池和超级电容的输出电流波形如图10所示,从曲线可以看出,光伏电池提供稳态电流,而超级电流提供动态电流,负载功率小时,光伏电池除了给负载提供功率,还同时给超级电容充电。

图8 电机速转、光伏电池和超级电容的输出功率、SOC曲线Fig.8 Curves of motor speed, PV power and super capacitor power, SOC

图9 直流链电压波形Fig.9 DC-link voltage waveform
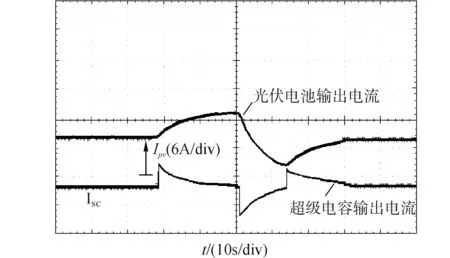
图10 光伏电池和超级电容电流Fig.10 Curves of PV cell and Super capacitor current
5 结论
本文提出了以光伏电池为主电源超级电容为辅助电源的混合动力船舶,其推进逆变器采用新型Z源逆变器,经过对其工作原理和控制策略的研究得到以下结论:
1)新型Z源逆变器可解决光伏电池输出电压变化比较大的问题,同时还可以减少Z源网络的电容电压应力和起动冲击电流。将其应用到混合动力船舶推进系统中,可维持推进电机的电压恒定。
2)采用双闭环控制既可以控制直流链电压的稳定,还可以使推进系统具有较好的动态过程,克服稳态时经常过载。
3)仿真和实验的结果较为接近说明本文所提出的混合动力船舶Z源推进系统和相应控制策略的有效性,为设计新能源船舶提供了一种新的思路,具有很强的工程实用价值。
[1]张桂臣,马捷.基于SIMOTION吊舱式电力推进的应用研究[J]. 中国造船, 2010, 51(193): 45-50. ZHANG Guichen, MA Jie. Study and application of podded electric propulsion system based on SIMOTION[J]. Ship building of China, 2010, 51(193): 45-50.
[2]赵红,郭晨,姚玉斌. 模糊控制有源电力滤波器在电力推进船舶中应用[J]. 中国造船, 2011, 51(194): 193-200. ZHAO Hong, GUO Chen, YAO Yu-bin. Research on fuzzy logic control-based active power filters applied in electric propulsion ships[J]. Shipbuilding of China, 2011, 51(194): 193-200.
[3]PENG F Z. Z-source inverter[C]∥Cooference Record of the 2002 IEEE Industrg Appilcations Pittsburgh, USA,2002: 775-781.
[4]彭方正,房绪鹏,顾斌等.Z源变换器[J].电工技术学报, 2004, 19(2):47-51. PENG Fangzheng, FANG Xupeng, GU Bin, et al.Z-Source converter[J]. Transactions of China electrotechnical society, 2004, 19(2): 47-51.
[5]OMAR E, JOERI V M, PHILIPPE L. Control of a bidirectional Z-source inverter for electric vehicle applications in different operation modes[J]. Journal of power electronics, 2011, 11(2): 120-131.
[6]PENG Fangzheng, SHEN M, HOLLAND K. Application of Z-source inverter for traction drive of fuel cell-battery hybrid electric vehicles[J]. IEEE transactions on power electronics, 2007, 22 (3): 1054-1061.
[7]苏建徽,茹心芹.基于Z源逆变器的光伏水泵系统研究[J].太阳能学报,2009(5): 628-632. SU Jianhui, RU Xinqin. Study of photovoltaic pump based on Z-source inverter[J]. Acta energiae solaris sinica, 2009 (5): 628-632.
[8]尤鏊,黄金军,郑建勇,等.基于滞环控制的Z源三相全桥光伏并网系统的研究[J]. 太阳能学报,2011, 32(5): 684-689. YOU Jun, HUANG Jinjun, ZHENGJianyong, et al. Research on Z source based three-phase full-bridge photovoltaic grid-connected system using current hysteresis control[J]. Acta energiae solaris sinica, 2011, 32(5): 684-689.
[9]PENG F Z, YUAN X, FANG X, et al. Z-source inverter for adjustable speed drives[J].IEEE power electronics letters, 2003(2): 33-35.
[10]THANGAPRAKASH S, KRISHNAN A. Current mode integrated control technique for Zsource inverter fed induction motor drives[J]. Journal of power electronics, 2010, 10(3): 285-292.
[11]程志友,程红江,于浩,等.开关电感型Z源逆变器拓扑结构的设计与仿真[J]. 农业工程学报,2013, 29(17): 129-136. CHENG Zhiyou, CHENG Hongjiang, YU Hao, et al. Design and simulation of topology structure for switched-inductor Z-source inverter[J]. Transactions of the Chinese society of agricultural engineering, 2013, 29(17): 129-136.
[12]TRINH Quocnam, LEE Honghee. A new Z-source inverter topology with high voltage boost ability[J]. Journal of electrical engineering & technology, 2012, 7(5): 714-723.
[13]TANG Y, XIE S, ZHANG C. Feed forward plus feedback control of the improved Z-source inverter[C]∥IEEE Energy Conversion Congress and Exposition. San Jose, CA, USA, 2009: 783-788.
[14]郑宏,邝文明,赵伟,等.多电平逆变器三段法空间矢量脉宽调制算法设计[J].农业工程学报, 2012, 28(21): 170-176. ZHENG Hong, KUANG Wenming, ZHAO Wei, et al. Design of three-segment SVPWM algorithm for multilevel inverter[J]. Transactions of the Chinese society of agricultural engineering, 2012, 28(21): 170-176.
[15]LONG B, SHIN T L, BAI Zhifeng, et al. Energy management and control of electric vehicles[J]. Energies, 2014(7): 4300-4315.
本文引用格式:
甘世红, 顾伟, 褚建新,等. 混合动力新船舶Z源电力推进系统[J]. 哈尔滨工程大学学报, 2017, 38(7): 1015-1022.
GAN Shihong, GU Wei, CHU Jianxin, et al. Study of a Z-source electrical propulsion system for a hybrid power boat [J]. Journal of Harbin Engineering University, 2017, 38(7): 1015-1022.
Study of a Z-source electrical propulsion system for a hybrid power boat
GAN Shihong1, GU Wei2, CHU Jianxin2, WANG Jiayi1, GAO Diju1
(1.Merchant Marine College, Shanghai Maritime University, Shanghai 201306, China; 2.Scientific Research Academy, Shanghai Maritime University, Shanghai 201306, China)
We investigated a type of hybrid power boat in order to solve the environmental pollution problem caused by the ship emission. The hybrid power boat uses photovoltaic (PV) cell and a super capacitor as the main power supply and auxiliary power supply, respectively. The electrical propulsion system of the hybrid power boat used the novel Z-source inverter. Details about the operating principle and control strategy of the hybrid power propulsion system were investigated. The stability of the DC-link voltage was maintained by the dual loop control, and the controller was designed based on a small signal model. The predictive model of the PV cell output power was established by applying a three-layer BP neural network. Furthermore, we designed the power predictive system of the PV cell. The output power of the PV cell and the super capacitor was controlled by the shoot-through duty cycle and the modulation factor. Finally, simulation and experiment results indicated that the PV cell delivered average power, and that the super capacitor provided the transient power and absorbed the regenerative braking power when the boat was running. These results verified the validity of the proposed control strategies.
hybrid power; new energy; boat; electrical propulsion; Z source inverter; control strategy ;BP neural network; photovoltaic cell
2016-04-19.
日期:2017-04-27.
国家自然科学基金项目(61304186);上海市自然科学基金项目(14ZR1419100);上海海事大学校基金项目(20130430).
甘世红(1970-),男,副教授.
甘世红,E-mail:shgan@shmtu.edu.cn.
10.11990/jheu.201604054
TM464
A
1006-7043(2017)07-1015-08
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170427.1413.054.html
