UUV水下定位方法的研究现状与进展
2017-08-31严浙平王璐
严浙平,王璐
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
UUV水下定位方法的研究现状与进展
严浙平,王璐
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
为了解决水下无人航行器(UUV)定位问题,对现有的UUV定位方法进行总结。UUV是海洋探测、开发的重要工具,精准的水下定位方法是顺利完成各种任务的重要前提与保障。随着水下定位技术的不断发展,涌现了许多水下定位方法。水下的特殊环境使得一些定位方法的应用受到了极大的限制。为了满足UUV的智能性以及自主性的需求,学者们提出了许多定位方法。根据不同原理、应用环境以及应用需求对UUV水下定位方法分类,分析各种方法的优劣,并对近年来的新兴方法进行了总结。结合UUV水下定位方法中当前存在的问题以及未来的发展趋势提出展望。
水下无人航行器;水下定位;定位方法;智能装备;自主定位
水下无人航行器(underwater unmanned vehicles, UUV)的研究可以追溯至20世纪中期[1-2], UUV在科学实验、军事调查、商业领域中应用的重要地位日益凸显。由于具备自主水下定位的能力,通过UUV自身携带的侧扫声呐、多波束声呐、海底地层剖面仪等设备可以实现对水下船体检查、水下环境构建、海洋管道探测、水下油田开发、水下侦察攻击等[3-4]。应用简便化、价格低廉化、性能优越化、功能完善化是水下智能装备的发展目标[5]。作为UUV完成水下各种复杂任务的前提,UUV水下定位十分重要。水下定位算法从UUV布放[6]入水开始就起到了关键的作用,并伴随着UUV执行任务的整个过程。然而,由于水下的特殊环境,使得UUV水下定位面临着巨大的挑战。一些直接用于陆地上的定位设备不适用于水下定位、水下定位误差过大使得UUV搜集到无效的数据[7]、水下定位仪器价格昂贵且体积较大等问题,一方面给UUV水下定位造成困难,另一方面也极大激发了学者们的研究热情。据统计,2006年以来,涉及航行器水下定位的文献多达篇1 181,其中有91篇文章被引数十次以上,最高被引频次为146次。2010年以来,UUV水下定位发展迅速,涌现出大量解决水下定位问题的新思路以及克服水下定位困难的新方法,本文将以2010年以后的研究成果为主,综述解决UUV水下定位问题典型方法的新思路以及新方法,并分析UUV水下定位中有待解决的问题,对未来的研究方向提出展望。
1 UUV水下定位的特点及分类
1.1 UUV水下定位的特点及分类
水下环境复杂和特殊,给UUV水下定位带来了极大的挑战。如何克服水下环境对水下定位的影响,提高水下定位精度,一直以来都是学者们关注的重点,也是近年来的研究热点。水下环境对于UUV定位的影响主要表现为以下几个方面:
1)干扰多,影响大。在海洋中,不仅存在海面风、潮汐、海流、海面锋、温度跃层、密度跃层等干扰,还存在温度、盐度、密度、压强等对水下定位仪器的影响。
2)能见度低。由于光在海水中衰减和散射比在大气中强烈得多,海水中的水平视程仅为大气中的千分之一。通常情况下海中能见度为20 m,具体数值会受到水质及水色的影响。
3)电磁波在水中无法传播,声信号传播效率低,可靠率低。这使得陆地上一些精准的定位设备(如GPS)的应用受到了很大的限制。
4)成本高、体积大、重量大的设备不便于UUV携带。由于UUV自身体积和重量的限制,对水下定位设备的体积和重量会形成一定的制约。同时,高精度的水下定位设备一般价格比较昂贵,在一些非军用的航行器上的应用也受到了限制。
5)隐蔽性问题。对于军事用途的UUV而言,隐蔽性是执行任务的先决条件,有些声学或视觉的水下定位方法,会将自身暴露。
应用中,需根据UUV作业实际需求结合上述水下特点选择合适的水下定位方法。一方面要考虑UUV工作的深度范围,另一方面要考虑UUV执行任务的航程范围。不同的水下定位方法有不同的适用范围,多种水下定位方法组合可以提高定位精度。
1.2 UUV水下定位的分类
1.2.1 深度对UUV水下定位的影响
根据深度对UUV水下定位的影响,可以分为浅海定位、海中定位和海底定位。适合不同深度应用的UUV定位方法分类如图1 所示。

图1 考虑深度的UUV水下定位方法分类Fig.1 UUV localization method classification based on depth
浅海定位一般是指在海面或靠近海面航行的UUV,此时无线电信号和卫星定位信号都可以传播。可以通过无线电信号在水面船或平台上遥控操作UUV水下定位,也可以通过卫星定位系统(如GPS、格洛纳斯、伽利略、北斗等)得到UUV准确的位置信息。
海中定位是指UUV既不靠近海面,无法获得无线电和卫星信号,也不靠近海底,不能通过海底地形等信息得到自己的位置。这时,可以应用惯性原理、重力场辅助定位、地磁辅助定位、多UUV协同定位、声学、视觉等方式。实际上在海中定位适用的各种方法同样适用于浅海和海底定位,但也由于无法通过绝对位置进行高精度校准使得海中定位精度较低。
海底定位最适用的方法是地形匹配定位方法,通过已知的海底地形,可以匹配得到UUV的绝对位置,但要求UUV航行的海域地形已知。另外,也可以通过多普勒测速系统得到UUV航行的绝对速度用于辅助UUV水下定位。
1.2.2 考虑航程对UUV水下定位的影响
当UUV执行航程最高为10 km的短程任务时,经过校准的惯性导航系统(intertial navigation system,INS)可以满足UUV任何路径的精度需求。如果对于精度要求更高,可以通过DVL进行辅助。对于特殊需求的十几米范围内的定位,则可以利用视觉和声学定位方式达到更高的精度。
当UUV执行远达100 km的远程任务时,首先UUV所选的路径对定位精度的影响很大。其次惯性原理的漂移较大。这种情况下,部署一个大型的网络信标,或提供UUV所在位置的海图,或应用地球物理方法进行协助定位。如果这些方法都不可行,就需要UUV在航行期间定期浮上水面进行GPS位置修正来保证定位精度。当UUV执行100 km以上的超远航程任务时,INS会产生显著的漂移。在这样一个大的面积范围内部署声信标也是不切实际的。在这种情况下,地球物理定位方法是执行这种超远航程任务的唯一可行方法,但地图的可用性会对这种方法造成限制[8]。根据航程远近对UUV定位方法的分类如图2 所示。

图2 考虑航程的UUV定位方法分类Fig.2 UUV localization method classification based on voyage
1.2.3 根据原理对UUV定位方法的分类
对于传统的水下定位方法,近年来学者不断深入研究,应用定位方法新形式解决了一些新问题,同时还提出了一些新方法应对新的挑战。但从本质上看,定位算法的原理仍可以分为惯性原理、卫星及无线电、声学、视觉、地球物理、模型和推算。
2 不同UUV定位方法的原理及特点
到目前为止,学者们所研究的定位算法的基本原理主要涉及6个方面,近年来,学者们不断深入探究,利用典型原理的新思路,解决了许多水下定位的难题。下面将对典型定位方法的原理以及最新进展加以概述。根据基本原理对UUV定位方法的分类如图3 所示。

图3 UUV定位分类概况Fig.3 Outline of UUV localization
2.1 UUV惯性原理定位
捷联惯导系统(stapdown inertial navigation system, SINS)是UUV定位中最常用的一种。其基本原理是利用加速度计和陀螺仪测得的信息结合定位算法,可以得到UUV的位置、速度、姿态信息,其原理可用4组基本方程来表示。
速度方程:
(1)
位置方程:
(2)
控制方程:
(3)
姿态方程:
(4)
式中:Vcx和Vcy为惯导捷联惯导系统计算得到的速度;φc和λc为计算得到的经纬度位置信息;ωx、ωy和ωz为指令角速度;ωcx、ωcy和ωcz为计算得到的指令角速度;α、β和γ为平台误差角;εx、εy和εz为陀螺漂移;Ax和Ay为加速度计输出; ΔAx和ΔAy为加速度计零偏;g为重力加速度;Ω为地球自转角速度。并且满足初始条件:Vcx(0)=Vx0,Vcy(0)=Vy0,φc(0)=φ0,λc(0)=λ0,α(0)=α0,β(0)=β0,γ(0)=γ0。
计算数据和估计结果的准确度取决于仪器的精度[9]。当前应用的陀螺仪主要有静电陀螺、环形激光陀螺以及干涉式光纤陀螺。近几年INS不断发展,一些新型的惯性定位系统也不断涌现,如光子惯性定位系统(photonicinertialnavigationsystem,PHINS)等。光子惯性定位系统可以输出位置、航向、横滚角、俯仰角、深度、速度、升沉等信息。光纤陀螺技术以及嵌入式数字信号处理器运行的卡尔曼滤波为其高精度测量能力提供了保障[10]。INS价格昂贵、体积较大、能源需求高等特点,严重限制了其在非军事领域的应用[11]。并且由于陀螺仪和加速度计的内在漂移误差,误差源在惯性器件内部,使得INS系统存在随时间累积的误差[12]。
2.2 UUV卫星和无线电原理定位
卫星与无线电定位均是利用无线电波在均匀介质(这里指空气)中传播时的直线性和恒速性进行定位的方法[13]。
卫星定位系统主要由定位卫星、地面台站以及用户定位设备组成。测量定位参数的几何原理主要有测角法、时间测距、多普勒测速以及组合法等系统方法。其中,时间测距定位系统以及多普勒测速系统应用较为广泛。时间测距定位系统是用户通过接收设备精确测量由系统中不在同一平面的4颗卫星发来信号的传播时间,完成数学模型计算,就可以算出用户的三维坐标。多普勒测速系统是用户定位设备根据从卫星上接收的信号频率与卫星上发送的信号频率之间的频移得到多普勒频移曲线,再根据卫星轨道参数就可以计算出用户的位置。从技术和应用前景上看,全球4大卫星定位系统分别是美国的GPS、俄罗斯的格洛纳斯、欧盟的伽利略以及中国的北斗卫星定位系统,各有优劣,GPS系统已经十分成熟,并在全球得到广泛应用,格洛纳斯系统的抗干扰性强,伽利略的明显优势在于精准性,而中国的北斗则在于其互动性和开放性。虽然优劣不同,但主要原理上基本类似。
无线电定位系统有3种主要形式:1)通过设置在母船或者地面基站以及UUV上的收发装置,来测量UUV相对于母船或地面基站的距离或距离差、相位差来进行定位,如地美依测距定位系统、罗兰双曲线定位系统、奥米加双曲线定位系统;2)通过UUV上的接收装置接收母船或地面基站发射的无线电信号,测量UUV相对于母船或地面基站的方位角实现定位,如伏尔侧向定位系统;3)测向和测距共用一个母船或地面基站的塔康定位系统,它也是目前最常用的无线电定位系统。无线电定位系统的优点是精度高;缺点是工作时必须有母船或地面基站配合,电波容易受到干扰,军用时容易暴露自身[13]。
对于近水面或浅海中航行的UUV,卫星和无线电可以提供精准的定位结果,但在海水中,信号无法传播,无法独立完成UUV定位任务[14-15]。
2.3 UUV声学定位
声学定位系统出现于20世纪70年代,最早开发的是单波束声呐,也是目前最常见的系统,通过发射的声脉冲和返回的声脉冲的双向时间来测量深度。最早的多波束声呐,受到角覆盖的限制,只有16束,与单波束相比,它可以提供更大面积的海底覆盖。如今多波束系统不断发展,工作范围从浅水域到深海,工作频率根据不同需求可以达到12~500 kHz[16]。常用的声学定位系统有长基线系统(long baseline, LBL)、短基线系统(short baseline, SBL)、超短基线系统(ultra-short baseline, USBL),其定位方式如图4所示。
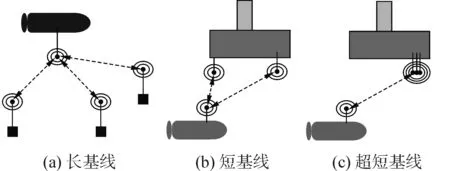
图4 长基线、短基线、超短基线示意图Fig.4 Schematic diagram of LBL, SBL and USBL
LBL、SBL和USBL定位系统都是基于声学原理,即声信标在收到UUV发来的信号后会在极短延迟后进行应答,根据声信号往返的时间、声信标位置和传播速度就可以计算UUV实际位置[1,17]。它们的区别在于声信标布放的位置以及工作的适用距离。LBL系统是由多个固定在海底区域的声信标构成适用于较远距离定位,SBL系统的信标安装在船体的两端,基线取决于船体的长度,USBL系统最近的传感器之间的距离近似小于10 cm,适用于回收UUV任务[1,11,18]。对于漏斗式UUV回收系统,可实现水下2 000 m深度的成功对接回收[19]。这些方法也存在不足,如在操作前需要校准复杂的声信标网络,精度和更新率取决于声波的频率、范围和几何路径等[11]。
随着声学定位的不断发展,伪长基线(pseudo long baseline, PLBL)、水下声学应答器(Underwater transponder positioning, UTP)、水下声学网络等声学定位系统不断涌现。PLBL系统与LBL系统不同的是在海底或海面基站近布放两个声信标,UUV在2个声信标之间巡航[12]。UTP是基于单海底应答器的定位方法,在海底布放多个应答器时,可以扩大定位范围。与LBL和USBL不同的是,UTP定位方法通过UUV上的换能器以固定的时间间隔发射水声信号,应答器接收到后返回一个不同频率的信号,确定UUV的距离和方位[20-21]。UTP系统的工作流程如图5所示。

图5 UTP系统工作流程图Fig.5 Flow chart of UTP
利用声学调制解调器系统进行UUV定位时,声信标不再是固定的,定位系统灵活程度得以增加[22]。采用侧扫声呐的侧扫线信息可以实现对海底的实时测绘,并采用占用格网映射方法的格网细胞限制特征点数量,减少UUV实时定位时间[23]。水下声学网络的链路层协议和声学网络网络层规划是通过一套简洁的数据包进行的,通过发射和回收实用程序包,利用三角测量方法可以计算点到点之间的距离,从而辅助UUV的定位[24]。
水声信号在水下的传播速度约为1 500 m/s,对处于运动状态的UUV定位时,必须考虑延迟误差,文献[25]在一个Ping(packet internet grope)采样周期内对惯导位置误差状态前推,重构与量测时间相匹配的量测方程,修正水声延迟误差。文献[26]通过运动方程推得基于随机延迟周期的多UUV协同定位定方程,基于状态转移矩阵得到系统的量测方程,利用基于状态估计均方误差最小的延时扩展卡尔曼滤波修正水声通信延迟误差。另外,文献[27]提出适用于UUV运行中实时噪声处理的散斑噪声抑制算法。文献[28]利用Lie导数的非线性系统秩判据对选用的深度、偏航角、俯仰角观测值进行系统分析,并且讨论了控制输入和运动轨迹对于系统可观测行的影响。
2.4 UUV视觉定位
UUV声学定位在水下中长距离定位中优势明显,但在对于安全性、精度和更新速率要求较高的近距离定位中,其优势就不突出了。应用于近距离定位的视觉定位近年来也在不断发展。
在适当的能见度条件下,UUV可以通过光学相机提供的一系列图像分析海流或特征物来实现自身定位[29]。文献[1]提供了一种利用光信标进行近距离UUV定位的系统。在UUV上安装光信标,并令不同UUV上的光信标以不同的方式闪烁。在需求近距离定位的编队UUV中,领航者UUV上安装全方位水下摄像机,就可以通过光信标来识别编队中其它UUV的位置和姿态。通过闪烁光信标追踪UUV的方式如图6所示。

图6 通过闪烁光信标追踪两个目标UUV示意图Fig.6 Representation of the localization of two target UUV using active light markers
激光测距系统由激光指示器以及彩色CCD相机组成,在能见度允许的情况下可进行水下结构的可视化研究,将一种基于目标相对位置的三角测量计算方法用于UUV水下定位[30]。文献[31]中的立体视觉里程计可以估计UUV的位移和航向信息,通过简化特征监测和跟踪过程,加快了处理进程,促进了三维重建模块的集成和再利用,每一个连续立体图像库中有大量的特征匹配信息,使得其可以处理高分辨率图像,保证实时性并提高准确性。 对于回收UUV操作的短距离UUV定位需求,文献[32]在UUV艏部安装两架摄像机,在回收基站周围安装4盏绿色的LED灯,通过摄像机实现视觉定位,其核心算法是通过判断两架摄像机的图像数量而在单目算法和双目算法之间切换。
UUV视觉定位可以达到很高的精度,如上面提到的各种利用视觉原理进行定位的方法,主要都是通过对视觉图像的分析得到定位结果。这就对能见度有极高的要求,而在水下,特别是深海,能见度很低,极大的限制了视觉系统在深海远程的应用。
2.5 UUV地球物理定位
地球物理定位是利用UUV的水下物理环境进行UUV的位置估计,地球物理环境是指已经存在的环境或者有针对性的特点[8]。目前应用在UUV上的地球物理定位方法主要有地形匹配定位、地磁场辅助定位、重力场辅助定位。
地形匹配定位(terrain based navigation, TBN)通过提前给出的地图信息对UUV的位置姿态信息进行估计[33-34]。地形高度匹配是TBN的关键技术。水下地形定位的准确性和可靠性取决于地形信息的丰富程度[35]。TBN方法主要分为两类:单束点线匹配以及多束线面匹配。多束线面匹配算法优于单束点线匹配的方面是可以同时获得成百上千的声数据,为水下地形匹配定位提供充足的数据供应。相关性方法是TBN的研究热点,实时比较探测数据与水下数字地图深度数据,最大相关点即为最佳匹配点。基于最小二乘估计的TBN是一种适用于UUV的定位方法[36]。地磁场辅助定位是通过UUV携带的磁力计测得磁数据,并将其与已经存在的地磁基准图比较,匹配定位。
洛克希德马汀公司海事系统和传感器部门(Lockheed Martin maritime system and sensors mitchel field, MS2)在重力感应技术领域的研究已经超过20年,MS2公司主要通过应用两种重力传感器来提高惯性定位系统的性能:重力仪和重力梯度仪。重力仪测量重力异常或相对于标称地球模型的重力矢量的偏差。重力梯度仪测量重力梯度以及由于线性代换造成的重力变化率,三维正交梯度仪可以测量三轴梯度的变化率。MS2定位算法应用所有可用的信息(重力、测量值、存储的数字重力地图、惯性定位数据等)进行组合估计并限制UUV定位误差[9]。重力场辅助定位的精度取决于重力地图的质量。
2.6 UUV模型和推算定位
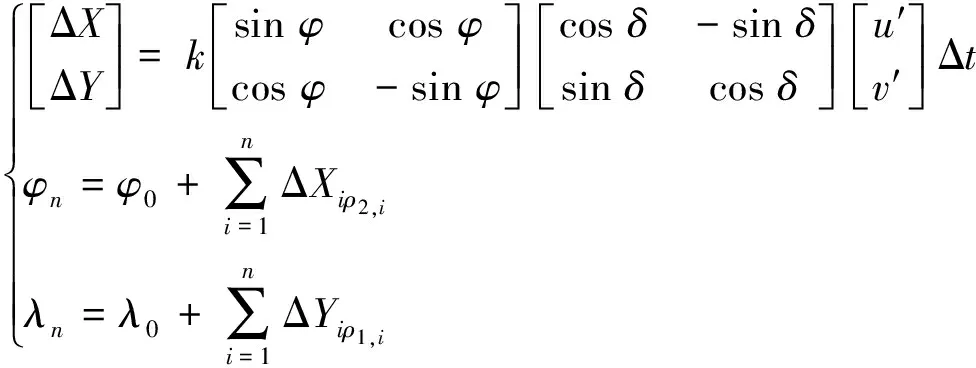
(5)
式中:X和Y分别为东向位置和北向位置, ΔX和ΔY为位置的改变量,u′、v′为前向和横向速度,φ为航向角,k为速度校正系数,δ为多普勒测速仪的安装误差角,Δt为采样时间间隔,ρ1,i和ρ2,i分别为时刻子午椭圆和纬线圈曲率,φi和λi分别为i时刻时,UUV的经度位置和纬度位置[37-38]。
对于航位推算方法运行过程中遇到UUV速度信息不可获得时,为了保证推算位置的准确有效性,文献[40]提出了一种基于UUV动力学模型辅助定位的方法,UUV的六自由度动力学模型为
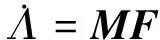
(6)
式中:Λ为UUV系统状态矩阵,M为质量矩阵,与系统质量、附加质量以及转动惯量相关,F为力矩阵,由执行机构和水动力产生。UUV数学模型已知时,通过数值积分方法可以得到系统状态矩阵,速度信息可以有状态代替,同时将海流信息加入到系统中,有效提高了这种情况下航位推算系统的准确性。文献[41]基于小波分解和单层重构的方法对航位推算输入信号进行滤波,既保留了UUV速度和载体信息,又消除了随机干扰。
通过模型辅助UUV定位的方法近年来不断发展。文献[42]提出的基于海流剖面的UUV辅助定位方法可以使得UUV在DVL信息失效的情况下仍可以得到较准确的速度辅助信息进行辅助定位。DVL速度信息有效时,一方面利用DVL信息辅助定位,另一方面用来控制海流剖面信息的卡尔曼滤波器的激励噪声方差Q通过最小二乘拟合的方法建立海流剖面—定位速度关系数据库。DVL速度信息部分有效或无效时,Q为定值,海流剖面数据经过滤波后输入到海流剖面-定位速度关系数据库得到UUV速度并用于航位推算。基于自身动态模型以及在定位任务开始之前和执行过程中的海流估计,通过卡尔曼滤波实现对于UUV惯性定位的模型辅助定位是一种新颖的定位算法,其优点在于不需要额外的硬件系统进行辅助,难点在于对于海流的准确估计,有很强的实用性和很大的发展空间[43]。多模型EKF组合定位方法[44]可以为UUV获得更加准确的定位结果。基于采样周期建立简单有效的适当数量的系统模型,且模型的测量方程的协方差满足自适应。为每一种模型选择合适的滤波方法,由UUV估计自己的位置。根据概率数据辅助理论确定所有滤波器的加权组合作为定位更加准确的结果。
3 UUV定位典型问题及解决方式
由于水下特殊的环境,UUV定位面临着许多亟待解决的问题,近年来学者们不断探索,为解决定位中的典型问题提出了许多新方法新思路。
3.1 振荡问题
由于SINS中有舒勒振荡、傅科振荡以及地球周期振荡的影响,对于长时间运动的UUV会产生影响[45]。通过在SINS系统中引入阻尼,可以抑制振荡误差,通常的阻尼抑制振荡误差的方法有内阻尼和外阻尼方法。针对单轴旋转的INS引入混合水平阻尼系统,通过引入旋转机构,旋转坐标轴的常值误差得到了补偿。同时引入内阻尼和外阻尼的混合水平阻尼系统可以提高系统精度,减小UUV驱动对于系统稳定性的影响,并且避免了参考速度精度对于系统的限制[46]。文献[45]设计了一种独立阻尼系统,在3个回路中添加3种不同的阻尼反馈,利用自己的速度信息进行误差补偿。文献[47]将外测速度作为参考,基于最优控制的思想设计了抑制振荡误差的反馈校正算法。文献[48]通过分析周期性振荡误差的特点,提出了一种基于预测时间序列的SINS振荡误差抑制方法。基于最小二乘法曲线拟合得到预测时间序列,利用估计振荡信号平均值半波延迟原理抑制振荡误差。
3.2 隐蔽性问题
对于军事应用的UUV而言,隐蔽性十分重要。而一些定位方法由于原理的限制,极易暴露自身位置。如声学定位时需要与外界交换声信息的过程中容易暴露UUV位置。卫星定位时,水下无线电信号无法传播,需要UUV定期上浮校正位置,这是也容易暴露自身位置。解决这个问题的方法就是以UUV自主定位为主。
3.3 成本问题
高精度惯导系统昂贵且体积较大,无法应用在小型低成本非军用UUV上。带有微电机系统惯性传感器(micro-machined electro mechanical system, MEMS)的姿态航向参考系统(attitude heading reference system, AHRS)如图7所示,体积小成本低,成为近几年来学者们关注的热点。由于MEMS系统的小型化和低能耗需求,可以很好地应用在小型低成本UUV上。AHRS系统由3轴MEMS陀螺,3轴MEMS加速度计以及3轴MEMS磁力计构成,可有效地安装在长1.5 m,宽度仅为15 cm的微小型UUV上。可以通过基于欧拉定理的从线性加速度到特定力的变换矩阵算法,又称为方向余弦矩阵算法以及EKF确定姿态[39]。

图7 基于MEMS的AHRS系统结构Fig.7 Configurations of AHRS based MEMS
对于多UUV协同定位,只在单独一个UUV上装有高精度DVL系统,并提出四面体构型几何算法,可以通过编队中装有DVL的UUV确定未装有DVL的UUV的位置,在消除SINS累积误差的前提下,极大降低了成本[49]。
3.4 效率问题
对于海中搜寻等任务,由单个UUV完成时经常需要数天甚至数月的时间。UUV编队可以大大提高效率[50],也是近几年来学者们研究的热点,学者们针对多UUV协同定位提出了许多有效的方法。如欧洲提出了GREX项目(2006-2009)(在未知环境中多无人系统的协同控制)[1,51]。
基于智能行为编队的UUV协同定位算法,如进行带障碍物的水下三维动目标围捕,受生物启发的神经网络算法控制下,多UUV编队可以很好的完成围捕任务[52]。通过研究动物群体(如蚁群、蜂群、鸟群、鱼群)生活的典型行为,受到动物群体行为的启发应用模糊控制规则,编队UUV协同跟踪海流中的一个动目标,未发生碰撞的情况,证明了算法的有效性[53]。文献[54]采用改进蚁群小波神经网络伪点估计器和遗传小波神经网络估计器进行多UUV协同点估计,提高协同定位精度。
UUV协同定位常采用主从式编队结构,文献[55]在直角坐标系中对主从式UUV定位系统进行了能观测性证明。多UUV协同完成任务的效率源高于单个UUV,编队UUV之间相互协作也可以极大提高定位精度,降低完成任务的成本,有很大的发展空间,将逐渐成为中间层海域定位的重要方法[56]。
3.5 精度问题
提高UUV定位精度,是一直以来学者们追求的目标,也是关注的重点。学者们普遍采用两种方式提高精度,一种是采用多种方法的组合定位,扬长避短。另一种是从提高算法自身来提高精度。
应用于UUV的最常见的组合定位为INS与GPS以及DVL的组合形式[6-7,10,57-60]。针对海洋中声散射、鱼群、海底沟壑等造成的DVL的随机噪声以及突发噪声问题,文献[61]提出了基于UUV运动约束的SINS/DVL组合定位DVL速度预处理方法,即基于恒速模型和UUV慢动作假设的速度跟踪方法,并采用基于χ2规则的故障诊断方法处理突发噪声。文献[62]将洋流信息对SINS/DVL组合定位系统的影响考虑进来,有效提高定位精度。文献[63]提出针对INS/DVL组合定位的回溯定位方案,UUV在布放时,无需等待校准过程完成,在已知初始位置和DVL速度信息的情况下,可获得当前的精确位置,定位精度在航程的0.3%。 多种方式(SINS、GPS、DVL、USBL、深度传感器、磁罗盘等)共同组合可以达到实时精确定位的效果[11,64-65]。文献[66]提出了一种将航位推算定位方法与多个信标测距信息利用延迟状态的扩展卡尔曼滤波相融合算法,应用离群点识别技术,提高多信标测距的精度。文献[67]应用SINS/LBL紧耦合算法解决误差积累问题。利用多传感器信息融合方法将SINS与LBL融合,可以克服误差累计以及多通道声信号传输造成多峰值的问题[68]。另外,可以利用压力传感器辅助INS定位来实时进行高度更新,减小误差[69]。混合USBL/LBL辅助INS定位系统工作主要分为两个连续的步骤。首先,借助GPS对固定节点定位,找出LBL拓扑,其次,声学辅助定位,UUV利用声学混合信息以及以前得到的信息共同提高定位精度[70]。组合定位的方式多种多样,其主要目的就在于对多种定位方式取长补短,共同作用,在保证UUV完成任务的广度和深度的同时,提高定位系统的精度。
从抑制自身误差、延迟、干扰等方面可以提高精度。如文献[71]对于多波束测深系统测量设备误差源分析,建立了深度估计模型和位置误差模型用于UUV深海定位辅助。对于单水面领航者的UUV协同定位,利用声学测距方法可以测得UUV相对与领航者的相对位置和姿态,结合胡贝尔迭代差分滤波算法可以得到更精确的结果并具有更快的收敛速度,同时对于测量值中的离群点具有鲁棒性[72]。文献[73]验证了编队中各个UUV之间的距离小于10m时,应用光信标视觉辅助姿态估计将提供比声信标估计更好的准确性。当几个从UUV距离较近,被主UUV上的声纳观测时,它们受到的干扰噪声具有相同的性质,即处于“相同观测环境”,在这种情况下可以通过系统辨识去除测量误差,提高精度[74]。应用EKF融合内部、外部传感器信息实时定位,可以有效解决协同定位中水声传播延迟的问题[75]。文献[76]提出了一种基于新息重建的状态估计方法解决水声通信延迟问题,即将从UUV上收集的信息储存起来,当收到主UUV的信息后,通过递推对系统信息重建并补偿到系统状态估计中。文献[77]通过统计建模方法对主UUV航迹进行预测,基于非等间隔滤波设计了用于不同传感器的实时滤波算法,将其用于从UUV相对距离更新的实时算法克服水声延迟。
下面通过表1对UUV定位方法的特点加以总结和比较。

表1 UUV定位方法比较
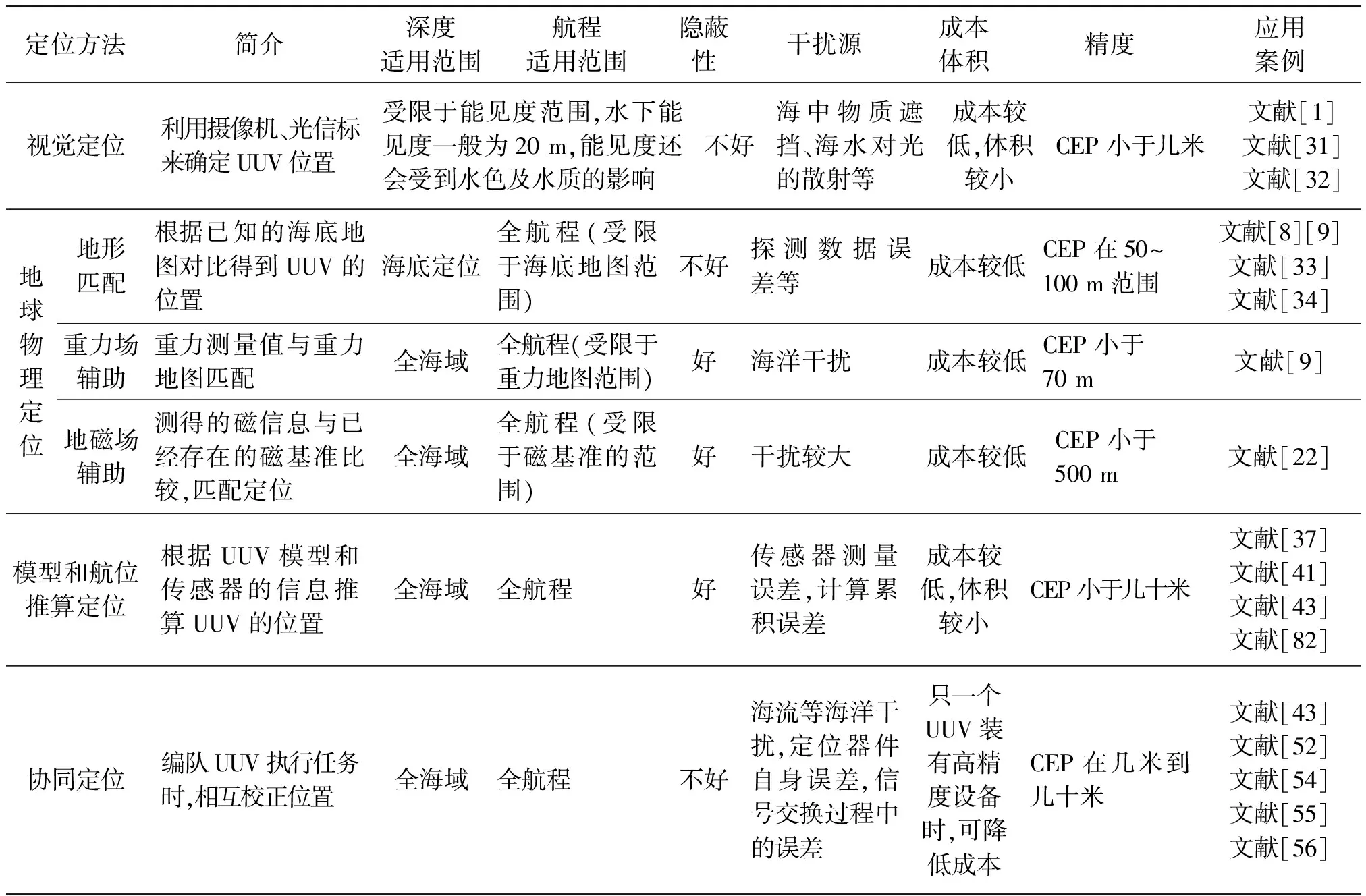
表1(续)
4 结论
本文以近十年来学者的研究为重点,概述了典型的UUV定位方法,并总结了UUV定位中常见问题的新方法新思路,对UUV定位方法的特点加以总结。
水下的特殊环境为UUV定位带来了挑战,同时也激发了学者们的研究热情。国内外学者针对特殊形状的UUV以及有特殊用途的UUV和UUV不同的作业方式提出了不同场景独特适用的定位方法,极大提高了定位精度。对于未来UUV定位的研究重点主要有:1)鲁棒性强的数据融合滤波算法;2)在保持定位精度的前提下,降低定位成本;3)UUV定位中的隐蔽性需求。对于应用于军事领域的UUV而言,其隐蔽性是十分重要的;4)多UUV协同定位,成为未来的发展方向;5)深远海UUV定位问题;6)UUV定位系统的可观测性分析。
[1]JOSEP B, NUNO G, PERE R, et al. Close-range tracking of underwater vehicles using light beacons[J]. Sensors, 2016, 16(4): 26.
[2]严浙平,周佳加.水下无人航行器控制技术[M].北京:国防工业出版社, 2015: 4-15. YAN Zheping, ZHOU Jiajia. Control technology of underwater unmanned vehicles[M].Beijing: National Defense Industry Press, 2015: 4-15.
[3]MARCO J. Autonomous inspection of underwater structures[J]. Robotics and autonomous systems, 2015, 67: 80-86.
[4]RUSSELL B W, VEERLE A I H, TIMOTHY P, et al. Autonomous underwater vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience[J]. Marine geology, 2014, 352: 451-468.
[5]CONTE G, CAPUA G P D, SCARADOZZI D. Designing the NGC system of a small ASV for tracking underwater targets[J]. Robotics and autonomous systems, 2016, 76: 46-57.
[6]CADENA A. Design and construction of an autonomous underwater vehicle for the launch of a small UAV[C]// Proc. of IEEE International Conference on Technologies for Practical Robot Applications. Wobum, MA, 2009, 78-83.
[7]LOBIS D, SUTTON R, CHUDLEY J. Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation system[J]. Control engineering practice, 2004, 12(12): 1531-1539.
[8]LUKE S, LIU Honghai. Navigation technologies for autonomous underwater vehicles[J]. IEEE Transactions on systems man and cybernetics-part C:application and review, 2008, 38(4): 581-589.
[9]RICE H, KELMENSON S, MENDELSOHN L. Geophysical navigation technologies and applications [C]// IEEE Position Location and Navigation Symposium. Monterey, CA, 2004, 618-624.
[10]GIACOMO M, SONG K C, JUNKU Y. Underwater autonomous manipulation for intervention missions AUVs[J]. Ocean engineering, 2009, 36(1): 15-23.
[11]JAMES C, KINSEY, LOUIS L. Whitcomb. preliminary field experience with the DVLNAV integrated navigation system for oceanographic submersibles[J]. Control engineering practice, 2004, 12(12): 1541-1549.
[12]LEE P M, JUN Bonghuan. Pseudo long base line navigation algorithm for underwater vehicles with inertial sensors and two acoustic range measurements[J]. Ocean engineering, 2007, 34(3-4): 416-425.
[13]朱家海. 惯性导航[M]. 北京:国防工业出版社,2008: 2-3. ZHU Jiahai. Inertial navigation system[M]. Beijing: National Defense Industry Press, 2008: 2-3.
[14]CHOI W S, HOANG N M, JUNG J H, et al. Navigation system development of the underwater vehicles using the GPS/INS sensor fusion[J]. Intelligent robotics and application, 2014, 8917: 491-497.
[15]ZHAO Lin, GAO Wei. The experimental study on GPS/INS/DVL integration for AUV[C]//Proeeding of IEEE Position Location and Navigation Symposium. Monterey, CA, 2004, 337-340.
[16]KEIR C, TETJANA R, CRAIG B, et al. A review of oceanographic applications of water column data from multibeam echosounders[J]. Estuarine, coastal and shelf science,2014, 145: 41-56.
[17]CONTI R, MELI E, RIDOIFI A, et al. An innovative decentralized strategy for I-AUVs cooperative manipulation tasks[J]. Robotics and autonomous systems, 2015, 72: 261-276.
[18]ALBERT S M, EDMUND F B, ØYVIND H, et al. Navigation and probability assessment for successful AUV docking using USBL[J]. IFAC Proceedings volumes (IFAC Papers Online), 2015, 48(16): 204-209.
[19]LI Dejun, CHEN Yanhu, SHI Jianguang, et al. Autonomous underwater vehicle docking system for cabled ocean observatory network[J]. Ocean engineering, 2015, 109: 127-134.
[20]王久光. 基于UTP的UUV远程航海水下位置校准及控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2012: 12-17. WANG Jiuguang. Underwater position calibration and control for UUV long-distance navigation based on UTP[D]. Harbin: Harbin Engineering University, 2012: 12-17.
[21]严浙平,邓超,李本银,等. UTP/DR组合导航算法研究[J]. 计算机工程与应用, 2014, 50(19): 7-10. YAN Zheping, DENG Chao, LI Benyin, et al.Research on UTP/DR integrated navigation system[J]. Computer engineering and applications, 2014, 50(19): 7-10.
[22]LIAM P, SAJAD S, MAE S, et al. AUV navigation and localization: A Review[J]. IEEE journal of ocean engineering, 2014, 39(1): 131-149.
[23]CHEN E, GUO J. Real time map generation using sidescan sonar scanlines for unmanned underwater vehicles[J]. Ocean engineering, 2014, 91: 252-262.
[24]OUIMET S P, HAHN M J, RICE J. Undersea communication network as a UUV navigation aid[C]// Proc. of Oceans 2005 Conference. Washingon, DC, 2005: 2485-2490.
[25]陈建华,朱海,郭正东,等. 基于水声传播时延补偿的惯导误差修正方法[J]. 舰船科学技术, 2016, 38(3): 97-100. CHEN Jianhua, ZHU Hai, GUO Zhengdong, et al. INS positioning error correction based on acoustic propagation time compensation[J]. Ship science and technology, 2016, 38(3): 97-100.
[26]高伟,杨建,徐博,等. 基于水声通信延迟的多UUV协同定位算法[J]. 系统工程与电子技术, 2014, 36(3): 539-545. GAO Wei, YANG Jian, XU Bo, et al. Cooperative location of multiple UUVs based onhydro-acoustic communication delay[J]. System engineering and electronics, 2014, 36(3): 539-545.
[27]HYEONWOO C, YU S C. Real-time sonar image enhancement for AUV-based acoustic vision[J]. Ocean engineering, 2015, 104: 568-579.
[28]严卫生,房新鹏,崔荣鑫. 单信标测距AUV水下定位系统观测性分析[J]. 中南大学学报:自然科学版, 2012, 43(8): 3085-3090. YAN Weisheng, FANG Xinpeng, CUI Rongxin. Observability analysis of single-beacon underwater localization of autonomous underwater vehicle[J]. Journal of Central South University: science and technology, 2012, 43(8): 3085-3090.
[29]NICOSEVICI T, GARCIA R, CARRERAS M. A review of sensor fusion techniques for Underwater Vehicle navigation[C]// Proc. of Oceans ’04 MTS/IEEE Techno-Ocean ‘04 Conference. Kobe, Japan, 2004, 1600-1605.
[30]HAYATO K, TAMAKI U. Navigation of an AUV for investigation of underwater structures[J]. Control engineering practice, 2014, 12(12): 1551-1559.
[31]FRANCISCO B F, MIQUEL M C, PEP L N C, et al. Inertial sensor self-calibration in a visually-aided navigation approach for a Micro-AUV[J]. Sensors, 2015, 15(1): 1825-1860.
[32]LI Ye, JIANG Yanqing, CAO Jian, et al. AUV docking experiments based on vision positioning using two cameras[J]. Ocean engineering, 2015, 110: 163-173.
[33]SEBASTIAN C, PHILIP W, PERE R, et al. A Survey on terrain based navigation for AUVs[C]// Proceeding of Washington State Conference and Trade Center(WSCTC). Seattle, WA, 2010, 7.
[34]张静远,谌剑,李恒,等. 水下地形辅助导航技术的研究应用于进展[J]. 国防科技大学学报, 2015, 37(3): 128-135. ZANG Jingyuan, SHEN Jian, LI Heng, et al. Research and application progress on underwater terrain-aided navigation technology[J]. Journal of National University of Defense Technology, 2015, 37(3): 128-135.
[35]WANG Lihui, YU Lei, ZHU Yanhua. Construction method of the topographical features model for underwater terrain navigation[J]. Polish maritime research, 2015, 22: 121-125.
[36]CHEN Pengyun, LI Ye, SU Yumin, et al. Underwater terrain positioning method based on least squares estimation for AUV[J]. China ocean engoneering, 2015, 29(6): 859-874.
[37]边信黔, 周佳加, 严浙平,等. 基于EKF的无人潜航器航位推算算法[J]. 华中科技大学学报:自然科学版, 2011, 39(3): 100-104. BIAN Xinqian, ZHOU Jiajia, YAN Zheping, et al. Dead reckoning method for autonomous underwater vehicles based on EKF[J]. Journal of Huazhong University of Science & technology: natural science edition, 2011, 39(3): 100-104.
[38]KINSEY J C, WHITCOMB L L. In situ alignment calibration of attitude and doppler sensors for precision underwater vehicle navigation: theory and experiment[J]. IEEE journal of oceanic engineering, 2007, 32(2): 286-299.
[39]HWANG A R, YOOM S. A study on attitude heading reference system based micro machined electro mechanical system for small military unmanned underwater vehicle[J]. Journal of the korean society of marine engineering, 2015, 39(5): 522-526.
[40]严浙平, 吴迪,周佳加,等. 基于UUV动力学模型的导航方法[J]. 华中科技大学学报:自然科学版, 2013, 41(11): 108-113. YAN Zheping, WU Di, ZHOU Jiajia, et al. UUV dynamic model-based navigation method[J]. Journal Huazhong University of Science & Technology: natural science edition, 2013, 41(11): 108-113.
[41]周佳加,边信黔,王宏健,等. 基于小波的无人潜航器航位推算算法研究[J]. 仪器仪表学报, 2012, 33(3): 670-676. ZHOU Jiajia, BIAN Xinqian, WANG Hongjian, et al. Study on dead reckoning method for unmanned underwater vehicle based on wavelet[J]. Chinese journal of scientific instrument, 2012, 33(3): 670-676.
[42]张勋,边信黔,严浙平,等. 基于海流剖面的UUV辅助导航方法[J]. 仪器仪表学报, 2013, 34(6): 1346-1352. ZHANG Xun, BIAN Xinqian, YAN Zheping, et al. Aided navigation method for UUV based on current profile[J]. Chinese journal of scientific instrument, 2013, 34(6): 1346-1352.
[43]ALAIN M, LUIS H, HICHEM S, et al. Model-aided navigation with sea current estimation for an autonomous underwater vehicle[J]. International journal of advanced robotic systems, 2015, 12: 14.
[44]LI Dongdong, JI Daxiong, LIU Jian, et al. A Multi-model EKF integrated navigation algorithm for deep water AUV[J]. International journal of advanced robotic systems,2016, 13: 15.
[45]XU Bo, SUN Feng. An independent damped algorithm based on SINS for ship[C]//Proc of International Conference on Computer Engineering and Technology. Singapore, 2009: 88-92.
[46]WANG Chao, ZHU Hai, LI Gang, et al. The mixed level damping of the single-axial rotation of INS[C]//Proc of SPIE. Singapore, 2011: 5.
[47]GAO Xin, BIAN Hongwei, FAN Songwei. Optimal damping algorithm design in inertial navigation system[C]//Proc of International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC). Chenyang, China, 2013: 2946-2949.
[48]ZHAO Lin, LI Jiushun, CHENG Jianhua,et al. A Method for oscillation errors restriction of SINS based on forecasted time series[J]. Sensors, 2015, 15(7): 17433-17452.
[49]ALLOTTA B, COSTANZI R, MELI E, et al. Cooperative localization of a team of AUVs by a tetrahedral configuration[J]. Robotics and autonomous systems, 2014, 62(8): 1228-1237.
[50]许真珍,封锡盛. 多UUV协作系统的研究现状与发展[J]. 机器人, 2007, 29(2): 186-192. XU Zhenzhen, FENG Xisheng. Current status and future directions of multiple UUV cooperation system[J]. Robot, 2007, 29(2): 186-192.
[51]LORENZO B, JOO A, JAN O. GREX sea trials: first experiences in multiple underwater vehicle coordination based on acoustic communication[C]// Proc of Oceans 2009 Conference. Bremen, Gernany, 2009, 633-638.
[52]HUANG Zongrui, ZHU Daqi, SUN Bing. A multi-AUV cooperative hunting method in 3-D underwater environment with obstacle[J]. Engineering applications of artificial intelligence,2016, 50: 192-200.
[53]HOU Yan, ALLEN R. Intelligent behaviour-based team UUVs cooperation and navigation in a water flow environment[J]. Ocean engineering, 2008, 35(3-4): 400-416.
[54]张彦超,候恕萍,邓超,等. 多UUV系统蚁群小波神经网络伪点迹估计器研究[J]. 计算机测量与控制, 2013, 21: 1605-1658. ZHANG Yanchao, HOU Shuping, DENG Chao, et al. Research on wavelet neural network pseudo point estimator adjusted by ant colony optimization for MUUVS[J].Computer measurement & control, 2013, 21: 1605-1658.
[55]冀大雄,李一平,刘健. 主从式UUV群的随从UUV导航[J]. 仪器仪表学报, 2009, 30(6): 631-634. JI Daxiong, LI Yiping, LIU Jian. Slave UUVs navigation in lead-slave UUVs[J]. Chinese journal of scientific instrument, 2009, 30(6): 631-634.
[56]徐博,白金磊,郝燕玲,等. 多AUV协同导航问题的研究现状与进展[J]. 自动化学报, 2015, 41(3): 445-461. XU Bo, BAI Jinlei, HAO Yanling, et al. The research status and progress of cooperative navigation for multiple AUVs[J]. ACTA automatica sinica, 2015, 41(3): 445-461.
[57]王冲,曾庆军. 基于Sage-husa自适应滤波算法的AUV组合导航系统设计[J]. 电子设计工程, 2013, 21(15): 75-80. WANG Chong, ZENG Qingjun. Design of AUV integrated navigation system based on Sage-husa adaptive filtering algorithm[J]. Electronic design engineering, 2013, 21(15): 75-80.
[58]LOEBIS D, SUTTON R, CHUDLEY J, et al. Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation system[J]. Control engineering practice, 2004, 12(12): 1531-1539.
[59]TRAN N H, CHOI H S, BAE J H, et al. Design, control, and implementation of a new AUV platform with a mass shifter mechanism[J]. International journal of precision engineering and manufacturing, 2015, 16(7): 1599-1608.
[60]张宏德. 微小型观探测UUV水下组合导航技术的研究[D]. 哈尔滨: 哈尔滨工程大学, 2013, 20-40. ZHANG Hongde. Research of mini UUV integrated navigation technology for ocean surveying and detecting[D]. Harbin: Harbin Engineering University, 2013, 20-40.
[61]ZHAO Liye, LIU Xianjun, WANG Lei, et al. A pretreatment method for the velocity of DVL based on the motion constraint for the integrated SINS/DVL[J]. Applied sciences-basel, 2016, 6(3): 15.
[62]张福斌,鲍鸿杰,段小伟,等. 一种考虑洋流影响的AUV组合导航算法[J]. 计算机测量与控制, 2012, 20: 513-522. ZHANG Fubin, BAO Hongjie, DUAN Xiaowei, et al. A AUV integrated navigation algorithm considering the effect of ocean current[J].Computer measurement & control, 2012, 20: 513-522.
[63]LI Wanli, WU Wenqi, WANG Jinling, et al. A novel backtracking navigation scheme for Autonomous Underwater Vehicles[J]. Measurement, 2014, 47:496-504.
[64]ZANONI F D, BARROS E A. A real-time navigation system for autonomous underwater vehicle[J]. Journal of the brazilian society of mechanical sciences and engineering, 2015, 37(4): 1111-1127.
[65]ALLOTTA B, CAITI A, CHISCI L, et al. Development of a navigation algorithm for autonomous underwater vehicles[C]∥Proceeding of IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV 2015). Girona, Spain, 2015: 64-69.
[66]JI Daxiong, SONG Wei, ZHAO Hongyu, et al. Deep sea AUV navigation using multiple acoustic beacons[J]. China ocean engineering, 2016, 30(2): 309-318.
[67]ZHANG Tao, SHI Hongfei, CHEN Liping, et al. AUV positioning method based on tightly coupled SINS/LBL for underwater acoustic multipath propagation[J]. Sensors,2016, 16(3): 16.
[68]ZHANG Tao, CHEN Liping, LI Yao. AUV underwater positioning algorithm based on interactive assistance of SINS and LBL[J]. Sensors,2016, 16(1): 22.
[69]ITZIK K, ROEE D. Observability analysis of DVL/PS aided INS for a maneuvering AUV[J]. Sensors, 2015, 15(10): 26818-26837.
[70]ALLOTTA B, BARTOLINI F, CAITI A, et al. Typhoon at CommsNet13: Experimental experience on AUV navigation and localization[J]. Annual reviews in control, 2015, 40: 157-171.
[71]WANG Yanhui, SHAO Shuai, WANG Shuxin, et al. Measurement error analysis of multibeam echosounder system mounted on the deep-sea autonomous underwater vehicle[J]. Ocean engineering, 2014, 91: 111-121.
[72]GAO Wei, LIU Yalong, XU Bo. Robust Huber-based iterated divided difference filtering with application to cooperative localization of autonomous underwater vehicles[J]. Sensors, 2015, 14(12): 24523-24542.
[73]NUNO G, JOSEP B, MOHAMMAD E K. Pose estimation for underwater vehicles using light beacons[J]. Proceeding of IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV 2015). Girona, Spain, 2015: 70-75.
[74]卢健,徐德民,张福斌. 共同观测环境多UUV协同定位[J]. 西北工业大学学报, 2013, 31(3): 378-384. LU Jian, XU Demin, ZHANG Fubin. Cooperative navigation in a common observation environment for multiple UUVs[J]. Journal of Northwestern Polytechnical University, 2013, 31(3): 378-384.
[75]张立川, 刘明雍, 徐德民,等. 多UUV协同定位与定位研究[J]. 系统仿真学报, 2008, 20(19): 5342-5349. ZHANG Lichuan, LIU Mingyong, XU Demin, et al. Cooperative localization and navigation for multiple UUVs[J]. Journal of system simulation, 2008, 20(19): 5342-5349.
[76]王文佳,孙睿智,高伟,等. 基于通信延迟误差补偿的协同导航算法[J]. 火力与指挥控制, 2014, 39(12): 27-30. WANG Wenjia, SUN Ruizhi, GAO Wei, et al. Cooperative navigation based on error compensation of communication delays[J]. Fire control & command control, 2014, 39(12): 27-30.
[77]姚尧,徐德民,张立川,等. 通信延迟下的多UUV协同定位—基于航迹预测的实时更新算法[J]. 机器人, 2011, 33(1): 161-168. YAO Yu, XU Demin, ZHANG Lichuan, et al. Cooperative localization of multiple UUVs with communication delays—A real-time update method on path prediction[J]. Robot, 2011, 33(1): 161-168.
[78]王宏健,李村,么洪飞,等. 基于高斯混合容积卡尔曼滤波的UUV自主[J]. 仪器仪表学报, 2015, 36(2): 254-261. WANG Hongjian, LI Cun, ME Hongfei, et al. Gaussian mixture cubature Kalman filter based autonomous navigation and localization algorithm for UUV[J]. Chinese journal of scientific instrument, 2015, 36(2): 254-261.
[79]BRYAN S, ROBERT H, EDWARD M, et al. The development of a free-swimming UUV for mine neutralization[C]// Proceeding of Oceans 2005 Conference. Washington, DC, 2005, 1443-1447.
[80]ALLOTTA B, CAITI A, COSTANZI R, et al. A new AUV navigation system exploiting unscented Kalman filter[J]. Ocean engineering, 2016, 113: 121-132.
[81]邓超. UTP辅助UUV导航误差校准方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2015, 17-95. DENG Chao. Research on error calibration method of UUV navigation aided by UTP[D]. Harbin: Harbin Engineering University, 2015: 17-95.
[82]李村. 无人水下航行器导航定位与环境感知技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2012, 15-43. LI Cun. Research on navigation and environment perception for unmanned underwater vehicle[D]. Harbin: Harbin Engineering University, 2012: 15-43.
本文引用格式:
严浙平,王璐. UUV水下定位方法的研究现状与进展[J]. 哈尔滨工程大学学报, 2017, 38(7): 989-1000.
YAN Zheping, WANG Lu. Research status and progress of UUV underwater localization[J]. Journal of Harbin Engineering University, 2017, 38(7): 989-1000.
Research status and progress of UUV underwater localization
YAN Zheping, WANG Lu
(College of Automation, Harbin Engineering University, Harbin 150001, China)
To solve the localization problem of underwater unmanned vehicles (UUVs), the localization methods of UUV were summarized in this paper. UUVs are important tools for oceanic exploration and development. Accurate underwater localization is an important prerequisite and guarantee for the successful completion of various tasks. With the development of underwater navigation technology, numerous underwater localization methods have emerged. The application of some underwater localization methods is greatly restricted by the special underwater environment. To satisfy the requirements of UUV for intelligence and autonomy, several localization methods were proposed. UUV underwater localization methods were classified according to different principles, application environments, and application requirements. The advantages and disadvantages of each method were analyzed, and recent methods were summarized. Present defects in the UUV underwater localization method were combined with future development trends.
underwater unmanned vehicle(UUV); underwater localization; positioning method; intelligent equipment; autonomous positioning; prospect; overview
2016-08-30.
日期:2017-04-27.
国家自然科学基金项目(51679057,51309367);黑龙江省杰出青年基金项目(J2016JQ0052).
严浙平(1972-), 男, 教授,博士生导师; 王璐(1991-), 女,博士研究生.
王璐,E-mail:wanglu0419@163.com.
10.11990/jheu.201608067
U666;TJ63
A
1006-7043(2017)07-0989-12
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170427.1321.016.html
