“木蛙”发声的实验探究
2017-08-02陈海深
陈海深
(广西师范大学物理科学与技术学院,广西桂林 541004)
“木蛙”发声的实验探究
陈海深
(广西师范大学物理科学与技术学院,广西桂林 541004)
用木棒刮擦木蛙背部的锯齿会发出类似青蛙叫声的现象引发思考.借助普通智能手机自带的Gold-Wave软件和朗威?DISLab的声音传感器探究其发声原因,通过分析相关发声的振动波形图和物理量,并对比刮擦木蛙与青蛙发声的振动波形图发现它们的波形近似,音色也近于一致.使受迫振动、阻尼振动等声学知识在解决真实问题情景中得到了科学的应用与提升.
木蛙;发声;实验探究
手托着一只木蛙的底部,用一根木棒沿木蛙背面的锯齿以稳定的频率刮擦,木蛙会发出类似青蛙“呱呱呱”的叫声(图1、2).当刮擦的频率较稳定时,木蛙发出的声音就越来越像青蛙的叫声,声音十分的逼真,非常的有趣,引发我们进一步的思考与探究.

图1 刮擦大木蛙

图2 刮擦小木蛙
1 观察实验现象,提出初步猜想
基于实验现象,观察到青蛙内部有一个空腔,这个空腔类似于嘴的口腔.初步判断是木棒的刮擦使木蛙的空腔产生了共振从而发出类似青蛙叫的声音.大木蛙与小木蛙的规格如表1所示.

表1 大木蛙与小木蛙的规格
共振是指某一物理系统在特定频率下,比其他频率以更大的振幅做振动的情形,这些特定频率称之为共振频率.[1]要想研究共振的前提是测量出木蛙的固有频率.如图3是用声学法测量木工铣刀的频谱图,物体的固有频率即为频谱图中的几个特别突出的点的横坐标,故先要测量出木蛙的固有频率,如表1所示.根据刮擦的频率与固有频率之间的关系判断.

图3 声学法测量木工铣刀频谱
表1 木工铣刀固有频率声学法测量值一览表
2 利用普通3G\4G智能手机的GoldWave软件进行声音频谱分析
首先将木蛙放置在桌面,桌面由于木棒的刮擦产生了振动而发出声响,从而影响木蛙发出的声音与青蛙的叫声之间的判断,所以刮擦木蛙时应将其放置于柔软的平面上,例如手掌上或胶垫上.再打开手机录音软件,用木棒刮擦小木蛙背部的锯齿,在非常安静的室内环境下将手机话筒放置于大、小木蛙的口腔旁分别录音,以不同频率刮擦大、小木蛙.用普通3G/4G智能手机自带的GoldWave软件记录并查看声音的频谱图,仔细观察其固有频率.图4和图5为大木蛙分别在每秒1.7次和每秒2.9次刮擦时发出的声音频谱图;图6和图7为小木蛙分别在每秒1.6次和每秒2.6次的刮擦时发出的声音频谱图.上述实验发现木蛙的声音频谱图没有出现上图3频谱图中那些特别突出的高点,所以无法通过分析木蛙的声音频谱图得到木蛙的固有频率.故推测刮擦木棒的频率可能与木蛙发出声音的频率没有直接关系.重复实验发现以不同频率刮擦木蛙发出的声音频谱图之间没有明显变化.

图4

图5
图6
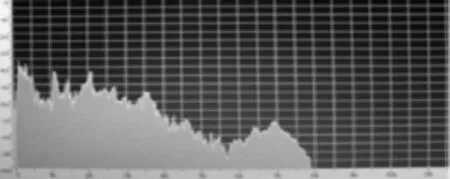
图7
3 木蛙发声振动的力学分析
进一步实验观察录音的发声振动波形图发现木蛙的发声是由于木棒以一定频率刮擦木蛙背部的锯齿时撞击产生.推断木棒刮擦其背部锯齿的振动属于受迫振动,我们知道振动系统在连续周期性外力作用下进行的振动叫受迫振动.[2]其受迫振动的动力学方程为

其中β、f0和ω0称为参量.(1)式求解得

其结果为两项式之和,表示质点运动包括两项分运动,前项是阻尼振动,随时间趋于0,是受迫振动的一个暂态,这一暂态与驱动力无关.后项是一个与驱动力频率相同且振幅为A0的周期振动.在受迫振动起始,其振幅较小,但一段时间之后,受迫振动中阻尼振动的部分消失,质点进行的是与上式后项驱动力频率相同的振动,此时为受迫振动的稳定振动状态.[3]
观察到刮擦木蛙背部锯齿时木棒所给予的驱动力持续时间短暂,根据上面受迫振动动力学方程的常见形式以及该方程的解,进一步分析知道木蛙的振动属于阻尼振动,推测木蛙发声的振动频率等于其固有频率,故可得到计算固有频率的公式.通过阻尼振动相关知识发现阻尼振动的频率不等于物体的固有频率,其微分方程式如下:

根据微分方程理论,对于一定的振动系统,可以根据阻尼因数β大小的不同,解出3种可能的运动状态.分别为欠阻尼状态、过阻尼状态、临界阻尼状态.
图8 木蛙的声音振动波形图
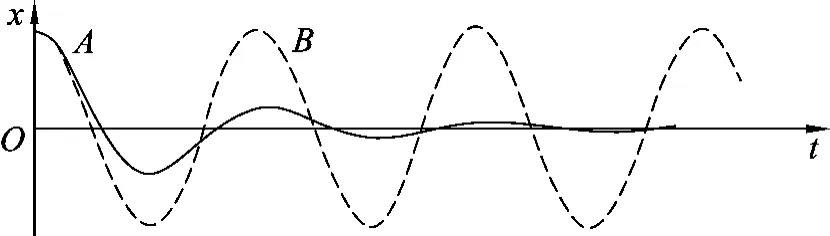
图9 欠阻尼振动波形图
通过对比两张波形图可以发现木蛙发声的振动波形图与欠阻尼状态的振动波形图相似,故推测木蛙在木棒刮擦后的阻尼振动处于欠阻尼状态.
当木蛙处于欠阻尼状态即阻尼很小,由上式可求出质点的运动学方程:
Ae-βt随时间的推移趋向于0,表示质点趋于静止.β为阻尼因数,β越大,阻尼越大,振动衰减越快;β越小,衰减越慢.[4]可用相隔一段时间的振幅之比的自然对数:

作为阻尼大小的标志,其阻尼系数为

其固有圆频率为

4 利用DISLab采集小木蛙发声的实验数据并分析
根据上述分析再次进行实验,多次以不同频率刮擦小木蛙.通过使用朗威?DISLab(数字化信息系统实验室)的声音传感器采集声音,DISLab的声传感器能测量声强并显示声音的波形、频率.声强量程在40~120dB范围,频率量程在100Hz~20000Hz范围.[5]
把小木蛙置于手掌,将声传感器放置于小木蛙的口腔边采集数据,然后用木棒刮擦小木蛙背部锯齿,采集多组实验数据后对实验所得的振动波形图进行分析.随后改变刮擦小木蛙的频率,再次进行实验数据的采集并分析.实验截图如图10、图11所示.
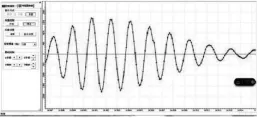
图10 快速刮擦小木蛙的声音振动波形图
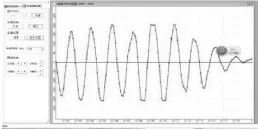
图11 慢速刮擦小木蛙的声音振动波形图
图10 刮擦频率比图11刮擦频率快,但通过图像发现两次实验中测量出来的一个周期内的计数点都是相同的.由于采用频率为10kHz,即两个点之间时间间隔为0.0001s.可以计算出声音的波形周期为
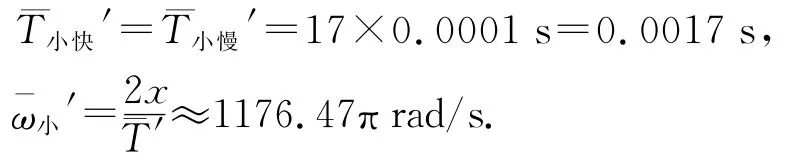
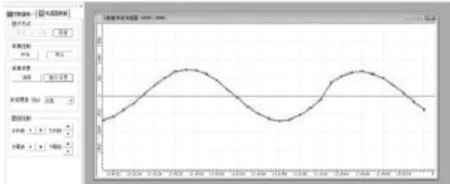
图12 小木蛙的阻尼振动图像
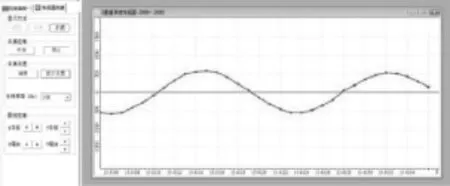
图13 小木蛙的阻尼振动图像
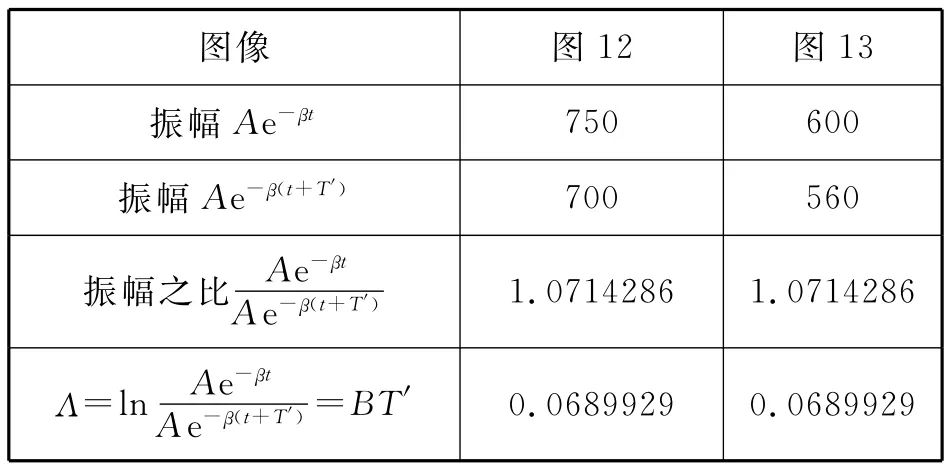
表2 小木蛙振动波形图的振幅分析表
5 利用DISLab采集大木蛙发声的实验数据并分析
将大木蛙置于手掌,开始刮擦大木蛙背部锯齿,将声传感器置于大木蛙的口腔边采集数据,在采集多组实验数据后针对振动波形图进行分析.随后改变木棒刮擦的频率,再次进行实验数据的采集并分析.实验截图如图14、图15所示.

图14 快速刮擦大木蛙的声音振动波形图
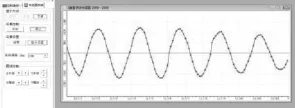
图15 慢速刮擦大木蛙的声音振动波形图
通过图像发现两次实验中测量出来的周期都相同.由于采用频率为10kHz,即两个点之间时间间隔为0.0001s,所以测量出振动的周期为

根据如图16所示的波形图,大木蛙振动波形图的振幅分析如表3所示.固有圆频率为
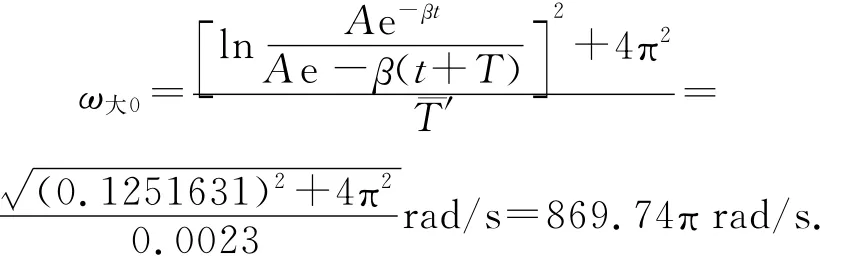

图16 大木蛙的阻尼振动图像
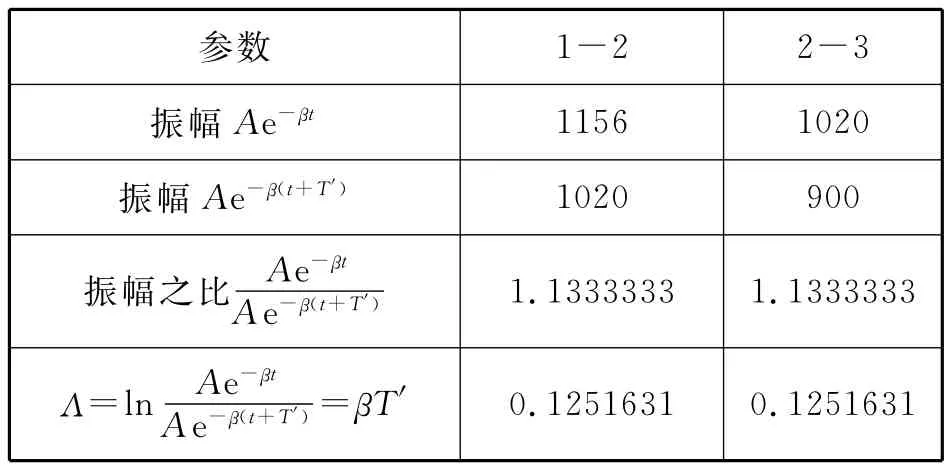
表3 大木蛙振动波形图的振幅分析表
6 实验结果分析
对比以上两种规格的大、小木蛙发出的声音频率,计算出大木蛙的固有圆频率和固有频率分别为ω大0=869.74πrad/s和f大0=434.87Hz,小木蛙的固有圆频率和固有频率分别为ω小0=1176.54πrad/s和f小0=588.27Hz.结合上述实验及计算出的实验数据,发现刮擦频率与木蛙的发声频率无关也与其固有频率无关.刮擦木蛙发出的“呱呱呱”叫声不是由于木棒刮擦木蛙背部锯齿导致木蛙振动而达到的共振.通过朗威?DISLab声传感器采集木蛙发声的振动波形图,进一步处理得到图17,而图18为青蛙叫声的振动波形图.
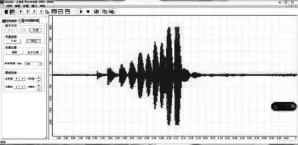
图17 大木蛙的放大的振动波形图

图18 青蛙叫声的振动波形图
对比刮擦木蛙的声音振动波形图以及青蛙真实发声振动波形图发现它们之间的波形近似,说明它们之间的音色近于一致,木棒刮擦木蛙发出的声音传到人耳听起来就与青蛙的声音非常相似.
1 苏晓琴,姜其畅,苏艳丽,王小平.共振的研究及应用[J].运城学院学报,2011,29(2):24-29.
2 刘惠娜,程敏熙.利用位移传感器改进受迫振动实验[J].大学物理实验,2009,(1):56-59.
3 陈良,徐勇,韩家骅.复摆运动中的混沌现象[J].巢湖学院学报,2003,(3):35-40.
4 漆安慎,杜蝉英.普通物理学教程力学[M].北京:高等教育出版社,1998:298-303.
5 宋樟伟.DISIab在中学物理实验教学中的应用研究[D].浙江:浙江师范大学,1998.
2017-02-12)
本文为广西高等教育本科教学改革工程项目重点课题“探索理科师范生探究教学能力发展的培养体系构建”(课题批准号:2016JGZ113)阶段性成果;本文为广西高校中青年教师基础能力提升课题“理科生从事科普活动资源开发的实践研究”(课题批准号:2017KY0047)阶段性成果.
