基于机器视觉的室内移动机器人导航偏转角的确定*
2017-07-01钟映春刘阿明谢仁亮广东工业大学自动化学院广州510006
钟映春,刘阿明,谢仁亮(广东工业大学自动化学院,广州510006)
基于机器视觉的室内移动机器人导航偏转角的确定*
钟映春,刘阿明,谢仁亮
(广东工业大学自动化学院,广州510006)
室内移动机器人需要在结构化的环境中定位和导航。常用的方法是采用电子罗盘获得机器人的偏转角。但是电子罗盘极易受到磁干扰。为此,提出了采用图像识别技术来获取机器人的导航偏转角。首先,利用机器人上搭载的摄像装置获取原始图像,进而提取图像中特定颜色分量;然后,利用改进的霍夫变换算法检测机器人正向矢量;最后,获得正向矢量与北向矢量间的夹角数据值。实验结果表明,该文所提出的基于机器视觉的确定室内移动机器人导航偏转角的方式可以避免硬磁干扰,具有较高的精度,保证准确性、实时性。
室内移动机器人;机器视觉;机器人导航;霍夫变换;图像识别
0 引言
室内移动机器人是一种在如家庭、养老院等结构化环境中具备自主移动能力的装置。随着社会经济与科学技术的发展,智能化机器人走进人们的生活,研究具有高精度导航定位能力的机器人成为当前热点之一[1-2]。
目前,在室内移动机器人导航应用中,广泛使用电子罗盘与机械陀螺仪来确定机器人当前角度,但电子罗盘离干扰源45cm之内,容易受到干扰源的硬磁干扰,严重影响输出的准确性[3-4],极端情况下可能导致机器人无法正常移动。为此,需要研究其他技术手段来避免室内移动机器人导航领域中的磁干扰问题。
本文采用机器视觉的方法来确定室内移动机器人导航偏转角。首先构建了室内移动机器人导航系统架构,然后采用图像识别技术来获得当前机器人正向矢量与北向矢量间的夹角数据[5],由于此检测方法可以人为按需选择物理安装空间以及选用高精度抗干扰类机械指北针,可以有效避免机器人自身导磁材料对测量精度的影响。
1 室内移动机器人导航系统架构
1.1 系统架构
本文以室内移动轮椅式机器人作为开发研究平台,机器人实物如图1所示。以搭载有Android操作系统的嵌入式设备(手机或平板电脑)作为人机交换面板。指北针设备安装在嵌入式设备的正下方,以保证获取到的图像在视图的正中央。

图1 室内移动轮椅式机器人
室内移动轮椅式机器人是一个复杂的系统,其导航系统的架构如图2所示。
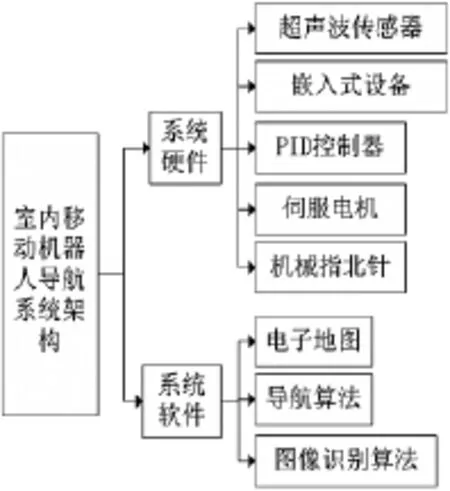
图2 室内移动机器人导航系统架构
1.2 机器人偏转角获取流程
机器人偏转角获取流程如图3所示。
3.1.1 灰度二值化
将图像进行灰度二值化,f(x,y)代表图像某一空间位置点的灰度值,g(x,y)代表变换后的灰度值,处理模型为:

图3 机器人偏转角获取流程
2 导航系统角度匹配模型
获取到的指北针示例图像如图4所示,灰色指针代表基准线,即北向矢量,黑色部分的直线方向与机器人方向一致或者成180°夹角,称为目标线,即机器人正向矢量。当指北针设备随着机器人发生角度位移时,由于地球磁场的原因,基准线将始终指向一个方向,黑色直线将随着机器人的角度位移发生偏转。当目标线所在的角度与导航地图所约定的零度方向一致时,目标线与基准线之间的夹角值代表机器人的当前角度值,即机器人正向矢量与指北矢量间的夹角数据。当目标线所在的角度与导航地图所约定的零度方向不一致时,这部分角度差值为Δθ,目标线与基准线之间的夹角值需加上Δθ才能代表机器人当前角度值[6]。

图4 指北针示例
3 机器人正向矢量与北向矢量的提取
3.1 图像预处理
在获取图像的过程中,由于各种因素的干扰会给图像带来噪声,表现为各种形式的干扰点或是条纹,图像中的噪声大大降低了图像质量,同时信息会受到干扰,在对图像进行各种操作识别之前必须对图像进行滤波操作,消除噪声对图像的干扰[7-8]。该系统中图像预处理流程如图5所示:①获取图像,尺寸为240× 320pixels;②提取图像中的蓝色分量与红色分量;③对图像进行灰度聚类处理;④确定目标象限。

图5 图像预处理流程

公式(1)中的α代表灰度阈值,采用Otsu自适应阈值法来确定[9],仿真实验中获得的α=50;灰度二值化操作将增强图像中的特征区域,使目标线或者基准线与背景区别开来。
3.1.2 灰度归一化与确定目标象限
将提取出的颜色分量图像采用分象限筛选的方式进行投票确定目标象限,基本思路是:将提取出来的红色分量图像按照标定的四个象限进行投票,黑点最多的象限,其区域灰度值保持不变,同时将黑点最多的象限标记为目标象限,其余象限灰度值全部置1。处理模型为:

3.2 原始图像处理流程图
原始图像处理过程如图6所示[10],分为4步:①获取指北针图像;②对图像进行预处理,剔除干扰,使检测目标易于识别;③识别检测目标,提取被测对象特征;④将图像特征形态学细化成一条细线;⑤利用霍夫变换,计算移动设备(如室内移动机器人)角度。
经过上述预处理处理的图像中,虽然大部分噪音已经被滤除,但还是存在一些冗余、干扰信息。如直接对其进行边缘检测和Hough变换,由于信息较复杂,Hough变换仍将占据较多的内存量和计算时间,影响整个导航系统的实时性。所以,在处理步骤上先利用形态学腐蚀操作对预处理后的图像进行二次去噪处理,去除原始图像中的冗余、干扰信息,以有效减少边缘信息总量,提高算法效率。
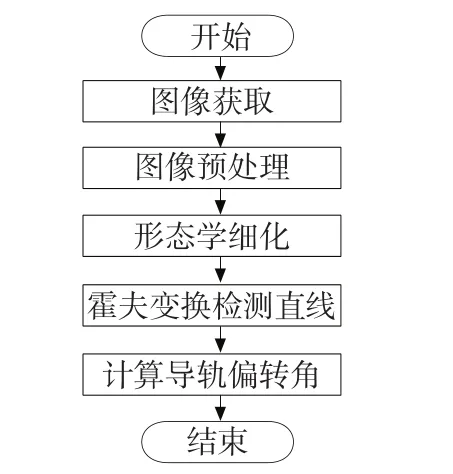
图6 原始图像处理流程
3.3 霍夫变换及其改进检测算法
3.3.1 标准霍夫变换检测直线原理
图像中的直线检测经常采用霍夫变换。霍夫变换的原理是:把笛卡尔空间中排列的像素点转换到极坐标空间,简化两两像素点斜率的检测,进而判定像素点是否在一条直线上[11]。
3.3.2 霍夫变换算法的改进
霍夫变换具有优异的鲁棒性和极佳的抗干扰能力,对图像中的噪音不敏感,能够较好地处理局部遮挡、覆盖等情况,但由于它是一种穷尽式搜索,因而其计算复杂度和空间复杂度都很高,巨大计算量阻止了它在移动设备如手机等实时性要求很高的领域的广泛应用。针对标准霍夫变换的缺点,本文采用多级分象限霍夫变换检测算法,该算法成倍缩小标准霍夫变换中的投票范围,提高了霍夫变换的计算速度。
3.3.3 两点表决霍夫变换原理
一个图像空间的点对应参数空间一条曲线,反之亦然,霍夫变换建立了不同空间下点线之间的对偶关系。在直线检测中,2个不同图像点唯一对应一个参数点,而不是一条参数曲线,从几何学上来说就是两点确定一条直线[12-13]。用这个参数点的参数进行表决同样能找出图像中的直线,但无需对图像点在整个参数空间进行计算,因此能大大减少计算量。
3.3.4 缩小标准霍夫变换投票范围
标准霍夫变换的投票过程中,将根据整幅图像的尺寸按照ρ和θ的步长进行穷尽似计算投票[14-15],极端情况下,其复杂度将达到o(n3)。在图像预处理模块,人为的将图像分为四个象限,根据各象限区域图像的像素值确定出直线所处的目标象限,这样,在霍夫变换投票过程中,我们可以根据目标象限直接将投票范围缩小到原来的四分之一,避免了标准霍夫变换中穷尽似搜索带来的能耗问题,提高计算速度。
3.3.5 改进后的霍夫变换直线检测算法
将上面两种策略结合起来,具体描述如下:①将颜色分量图像分为四个象限,确定目标象限;②根据目标象限,将(xj,yj)限定在目标区域;③针对目标区域进行霍夫变换检测,即从图像块中任意取两个特征点(xi,yi)和(xj,yj),根据式(1)计算经过这两点直线的参数ρ和θ,并对参数空间的(ρ,θ)单元投票,进而检测得到目标区域中的直线参数ρ和θ。
由上述分析可知,改进的Hough变换在以下2个方面减少了计算量:①缩小目标区域,减少了复杂的正弦和余弦运算次数;②缩小了参数ρ和θ的范围。表1为算法测试运行时间。

表1 角度精度为0.5ο的运行时间表(ms)
4 机器人导航偏转角软件系统的构建
算法程序流程图,如图7所示。

图7 导航偏转角软件流程
4.1 特定颜色分量的图像仿真处理结果
按照上述图像预处理步骤得到的效果图如图8所示。
从图8可见:①红色颜色分量与蓝色颜色分量可以清晰地提取出来,说明图像预处理对原始图像所进行的滤波细化操作是有效的;②采用形态学细化的策略可以将特定颜色分量的图像进行腐蚀细化,且滤除大部分噪音。③在实验过程中,红色分量存在被蓝色分量遮盖的情况,存在色素提取不完整,所得图像模糊的情况,需要另外确定合适的二值化阀值大小。

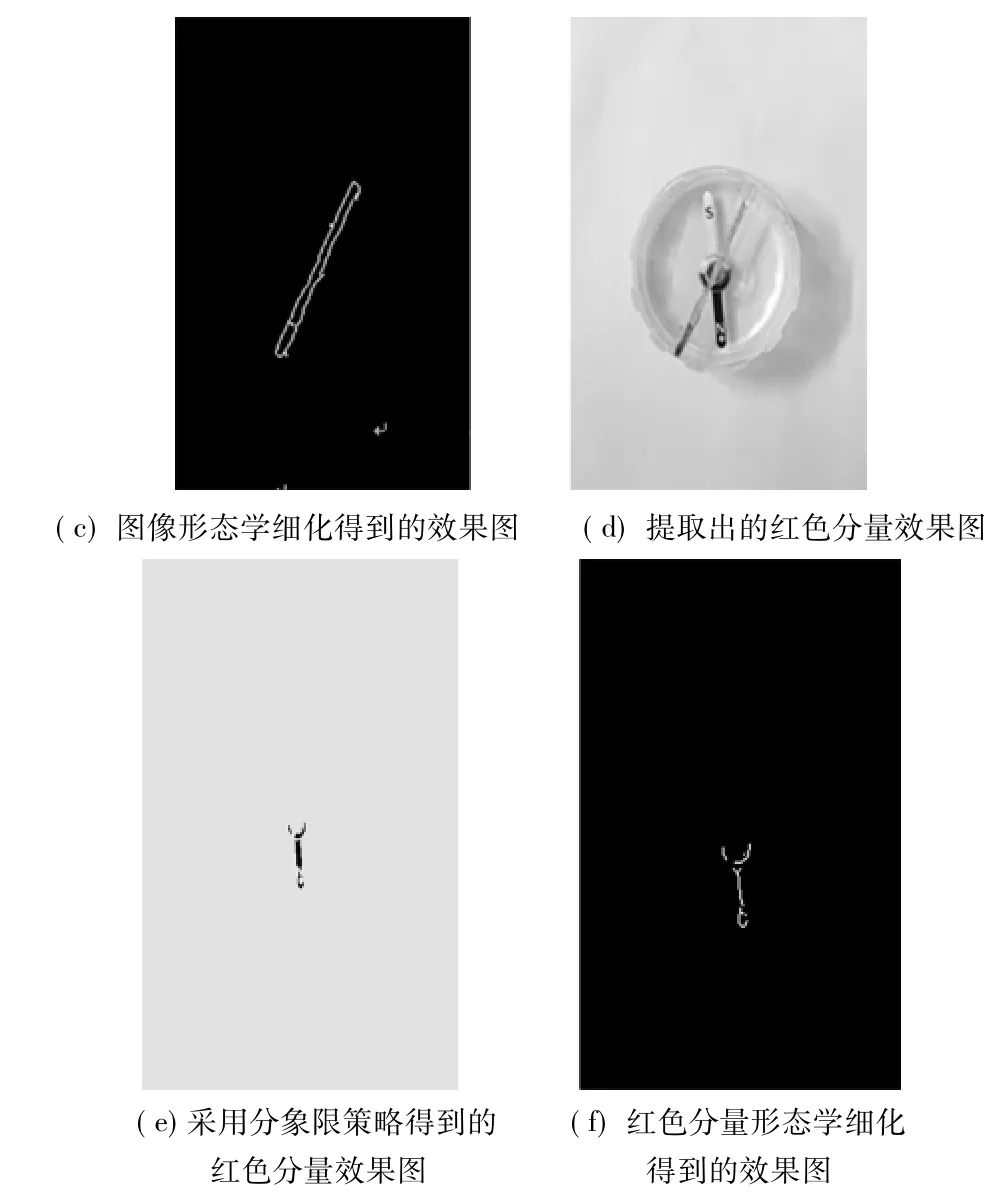
图8 图像仿真结果
4.2 机器人导航偏转角测试结果与分析
随机获取不同位置的图像,按照上述算法,进行霍夫变换直线角度识别,得到结果如表2所示,表中的数字代表获取到的指针所在直线的角度值,从表2可知:①由于指北针上黑色分量与灰色分量的分布特点,相比于灰色分量,黑色分量其色素的提取相对较清晰准确,在图像二值化过程中直接通过自适应选取二值化阀值方式,就能准确的识别出所代表的直线角度;②灰色分量所代表的直线,经过多次试验验证,取thresh= 0.20时可以获得理想的检测结果;③不同时间下的采样图片,都能获得较好的检测角度,可见本文提出的检测移动机器人导航偏转角的方式具有实用性。④检测使用中将指北针上的黑色部分缩小为一个半径的长度,在以指针交点为原点的坐标系中,黑色直线所对应的正向矢量将只对应一个角度。⑤利用改进的霍夫变换检测算法可以较快的得到检测结果。
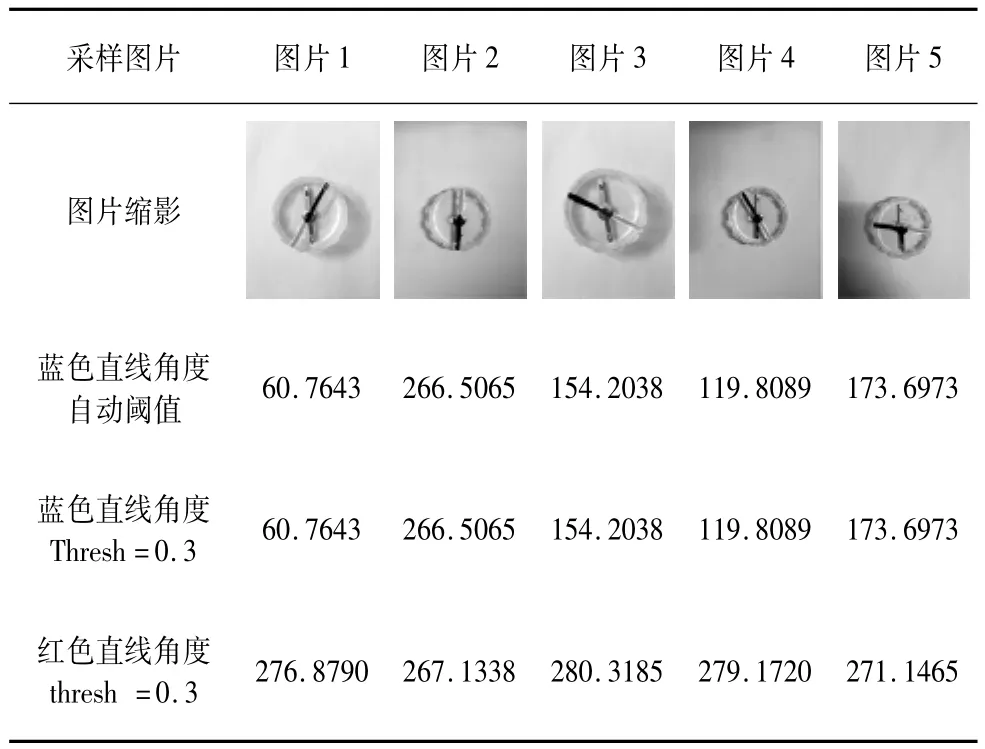
表2 偏转角测试结果

续表
5 结论
针对室内移动机器人导航领域中电子罗盘容易受到磁干扰,影响机器人正常移动的问题,提出了基于机器视觉的方式来确定机器人导航偏转角。同时针对标准霍夫变换检测算法存在的穷尽式搜索问题,提出了改进策略,提高了检测效率。为了得到机器人导航中的偏转角参数,构建了角度匹配模型,通过提取、检测指北针中的颜色分量来达到获取导航偏转角的目的。通过试验和分析表明:
(1)采用机器视觉的方式来确定导航偏转角,可以有效地避免磁干扰,通过Hough变换算法检测黑色分量所代表的北向矢量与灰色分量所代表的正向矢量,检测出的角度值准确率可达96%,角度误差范围在0°~3°;
(2)在运行Hough变换检测算法之前,将图像进行形态学细化有助于减少干扰与减少Hough变换的计算时间与内存空间,通过采用分象限的策略,缩小Hough投票范围为原来的四分之一,程序平均执行时间缩小为标准Hough变换检测算法执行时间的30%左右;
(3)在Android 4.2系统,1G运行内存,系统正常运行的情况下,测试实验每100ms~125ms可以得到一次角度值,能够满足大多数情况下的室内移动机器人定位导航的使用需求。
[1]宋章军.服务机器人的研究现状与发展趋势[J].集成技术,2012,1(3):1-9.
[2]S János,I Matijevics.Implementation of Potential Field Method for Mobile Robot Navigation in Greenhouse Environment with WSN Support[A].in 2010 8th International Symposium on Intelligent Systems and Informatics(SISY)[C].2010:319-323.
[3]周璐璐.抗磁干扰电子罗盘的制作[J].卷宗,2014,4 (11):275-276.
[4]周鹏.基于水文定位的电子指南针系统设计[J].通讯世界,2015,8(15):214-214.
[5]RUSS R.Testing and field calibration procedure for the KVH C100 compass[R].Victoria:SpaceandSubsea Robotics Lab,University Victoria,2001.
[6]邹庆胜,汪仁煌,明俊峰.基于机器视觉的瓷砖多参数分类系统的设计[J].广东工业大学学报,2010,27(4): 46-50.
[7]刘军超.图像处理和图像识别基本理论[J].科技博览,2015,5(5):230-230.
[8]杜慧,邓潇潇,李建,等.智能的图像滤波去噪算法[J].计算机工程与设计,2015,36(8):2180-2184.
[9]赫颖明,朱枫.2维Otsu自适应阈值的快速算法[J].中国图象图形学报,2005,4(10):484-488.
[10]兰华勇,严华.基于图像识别技术的水尺刻度提取方法研究[J].人民黄河,2015,37(3):28-30.
[11]姚敏.数字图像处理[M].北京:机械工业出版社,2012.
[12]易玲.基于分级的快速霍夫变换直线检测[J].微计算机信息,2007,23(11):206-208.
[13]Spak J,Moyer L R,Lamanna P A.multidimensional Hough transform based trackbefore-detect technique for detecting weak targets in strong clutter backgrounds[J].IEEE Transactions on In strumentation and Measurement,2011,47(4):3062-3068.
[14]李鸿武,董波.基于霍夫变换的工具痕迹特征提取方法研究[J].中国刑警学院学报,2014,4(4):25-28.
[15]刑坤,何红艳,岳春宇,等.遥感图像中基于Hough变换的直线提取算法[J].航天返回与遥感,2015,36(1): 87-94.
(编辑李秀敏)
The Determ ination of Navigation Deflection Angle for M achine Vision-based Indoor M obile Robots
ZHONG Ying-chun,LIU A-ming,XIE Ren-liang
(School of Automation,Guangdong University of Technology,Guangzhou 510006,China)
Indoor mobile robots are needed to locate and navigate in a structured environment.To obtainthe deflection angle of the robots,a common method is using electronic compass.However,since electronic compass is highly susceptible to magnetic interference,a new method using image recognition technology is put forward.Firstly,original image can be acquired from the photographic device installed on the robots,and then its specific color components can be extracted;afterw ards,modified Hough transform algorithm canbe used to detect the positive vector of the robots.Lastly,the included angle data betw een the positive vector and the north vector can be acquired.Experimental results show that the proposed method of determineng navigation deflection angle for machine vision-based indoor mobile robots avoids hard magnetic interfere-nce and ensures high accuracy,precision and timeliness.
indoor mobile robots;machine vision;robot navigation;Hough transform;image recognition
TH166;TG659
A
1001-2265(2017)04-0001-04
10.13462/j.cnki.mmtamt.2017.04.001
2016-06-25;
2016-07-24
广东省佛山市科技计划项目(FZ2010013);广东省高性能计算重点实验室开放课题项目(TH1528)
钟映春(1973—),男,江西赣州人,广东工业大学副教授,研究生导师,博士,研究方向为模式识别与图像处理;通讯作者:刘阿明(1991—),男,湖南耒阳人,广东工业大学硕士研究生,研究方向为图像处理与算法研究,(E-mail)675234258@qq.com。