舰船辐射噪声中鲸类联络叫声检测方法
2017-06-19李大卫杨日杰韩建辉巩建文
李大卫, 杨日杰, 韩建辉, 巩建文
(1. 海军航空工程学院学 电子信息工程系, 烟台 264001; 2. 95972部队, 甘肃 酒泉 735018)
舰船辐射噪声中鲸类联络叫声检测方法
李大卫1,2, 杨日杰1, 韩建辉1, 巩建文1
(1. 海军航空工程学院学 电子信息工程系, 烟台 264001; 2. 95972部队, 甘肃 酒泉 735018)
鲸类联络叫声的频段与舰船辐射噪声频段的重叠,使其易被误检测为舰船噪声而被被动声纳接收,影响后续对被动声纳检测到的信号进行目标自主识别等信号处理的性能。针对鲸类联络叫声干扰目标识别等声纳信号后续处理的问题,提出舰船辐射噪声中鲸类联络叫声检测算法,为削除鲸类联络叫声干扰作准备,算法首先通过理论与实测数据分析得出舰船辐射噪声频谱分布的短时稳定性特征,进而采用中值滤波方法对舰船辐射噪声进行白化处理,利用三阶多项式相位信号对鲸类叫声建模,然后通过基于匹配滤波器的广义似然比检测方法,实现了舰船辐射噪声中鲸类信号的检测。经实测信号的实验验证,提出的算法适用于不同类型和工况的舰船;通过与其他三种检测方法的比较分析,算法在给定虚警率下可以取得较高的鲸类叫声检测率,检测结果优于其他三种方法。
鲸类联络叫声; 舰船辐射噪声; 多项式相位信号; 预白化处理; 广义似然比检测
由于部分鲸类联络叫声(contact calls)能量集中在50~400 Hz范围内[1],其位于舰船辐射噪声的能量集中频带范围(f≤1 000 Hz)[2]内,声信号频率范围的重叠,使得此类鲸联络叫声会被被动声纳误检测为舰船辐射噪声而被接收,在后续对被动声纳接收的信号进行目标自主识别等信号处理时,鲸联络叫声会成为干扰信号而影响识别性能,为此,在对被动声纳接收的信号进行目标自主识别时,需要先对此类鲸联络叫声干扰信号进行检测和抑制,以消除对目标自主识别的影响,本文工作集中在对被动声纳接收的信号进行后续目标识别等信号处理阶段,如图1所示,主要完成舰船辐射噪叫声中鲸类联络叫声的检测,为后续的抑制或消除干扰信号做准备。
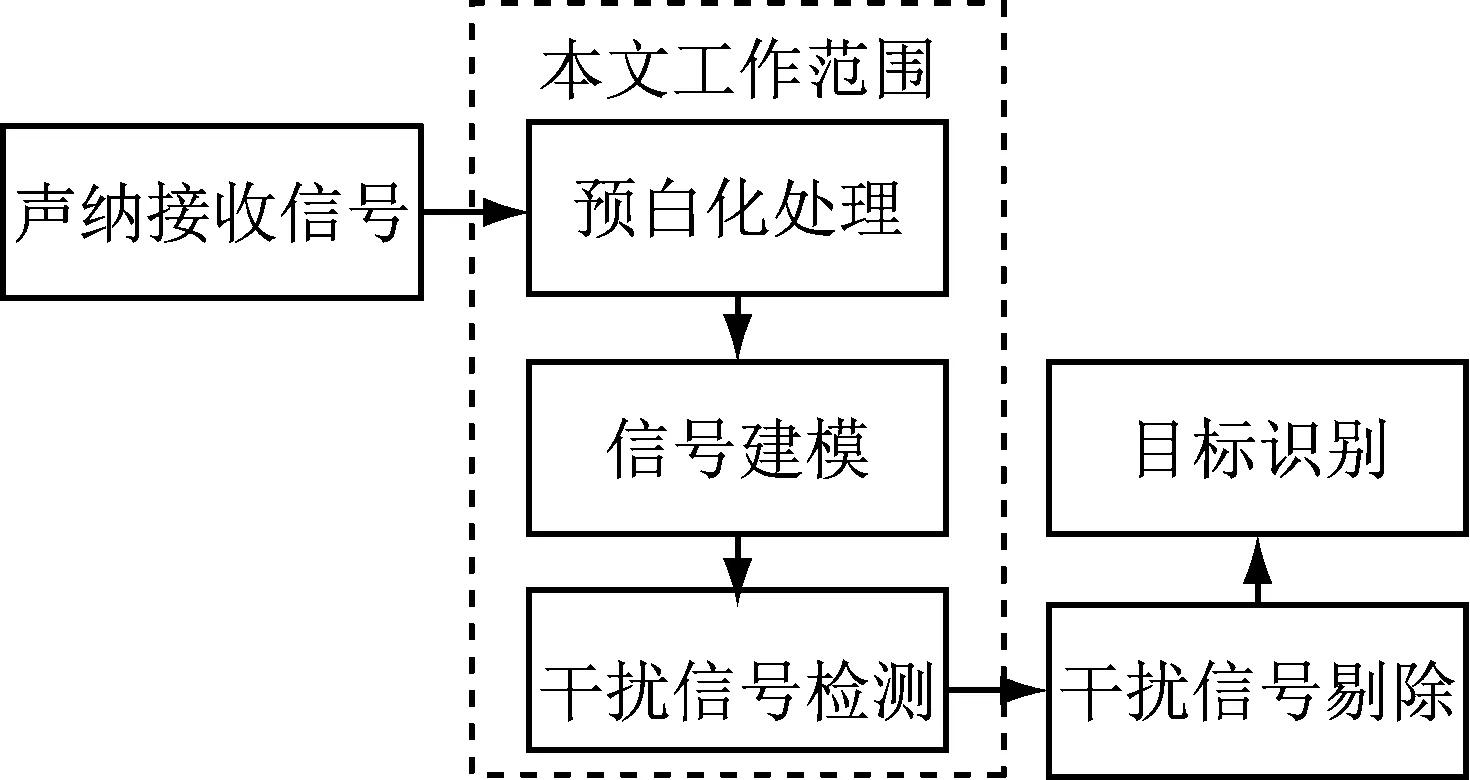
图1 本文工作在声纳信号处理流程中的位置
国外学者早在60年代就开始对各种鲸类叫声的研究,几十年来,学者们在世界各个海域对不同种类的鲸类叫声进行采集、整理[3],并提出了很多声信号的处理方法,包括总能量检测法[4],谱相关方法[5],人工神经网络,基于短时傅里叶变换时频谱的统计特性方法等等。传统的实时自动鲸类联络叫声检测方法通常基于峰值能量检测或频带峰值能量检测,但由于背景噪声中各种瞬时噪声的出现,往往产生很高的虚警。Mellinger等[6]将匹配滤波器、隐马尔可夫模型和谱图互相关等方法用于鲸类联络叫声检测,经对检测结果进行比较分析,得出基于谱图互相关的检测方法取得最好的检测效果,在后续工作中,通过测量鲸声信号中的时变特征对基于谱图互相关的方法进行了改进优化[7-9],并将优化后的方法用于其它声信号检测,Erbe等[10]对包括基于匹配滤波器、频带相关、BP神经网络和人工观测等检测方法在气泡噪声、冰裂噪声和高斯噪声等环境下的鲸类联络叫声检测方法进行了测试比较,Gillespie等[11]提出了一种通过在露脊鲸的时频谱中寻找边缘的基于门限的检测器。Sánchez-García等[12]采用分区域分析的方法,搜索频谱矩阵的强度级别,达到检测的目的。Urazghildiiev等[13-14]采用基于露脊鲸联络叫声时频谱统计特征的检测方法,经过实验比较,取得了比基于谱相关检测[5]等更好的检测效果。
但上述检测方法更多的注重某一特定鲸联络叫声在海洋环境噪声下的检测,对于舰船辐射噪声信号中检测鲸类叫声干扰信号的情况研究的很少,仅在部分文献[13-14]中简单论述。而实际上舰船目标种类繁多且状态多变,从舰型、工况到航次,覆盖范围极广,即使同一舰型在不同状态下其噪声特征差异也很大,这使得在进行目标识别等后续处理过程中,海洋环境噪声下检测方法在舰船辐射噪声下检测鲸类联络叫声时失效,因此如何在特征多变的舰船辐射噪声中检测出鲸类联络叫声为本文工作研究的重点,为此文中以须鲸、座头鲸、露脊鲸等一类能量集中在50~400 Hz之间的鲸类联络叫声为检测对象,通过理论分析与实测数据实验分析研究舰船辐射噪声时频稳定性特征的基础上,利用舰船辐射噪声的短时稳定性采用基于中值滤波的预白化方法对舰船辐射噪声预处理、采用未知参数的三阶多项式相位信号(PPS)对鲸类联络叫声进行建模,最后采用基于匹配滤波器的广义似然比检测方法实现鲸类联络叫声在舰船辐射噪声中的检测。
1 信号建模分析
1.1 舰船辐射噪声建模分析
如前分析可知,不同类型不同工况的舰船,其噪声之间复杂多样,即使同一类型的舰船,也很难找到稳定的特征进行描述,但从舰船噪声机理可知,不论何种类型的舰船运行于何种工况,其噪声主要由机械设备的运行,螺旋桨旋转等影响产生,因而,当工作于某一工况时,舰船的形状、大小、推进系统、运行状态、结构和材料等都会成为其噪声特性的决定性因素[15-16],而根据舰船运行实际情况,这些决定因素在一个较短时间内(比如几秒钟的时间间隔)会保持在一个较稳定状态,这使得其噪声特性也会表现出较好的短时稳定性,表现在频谱分布上即为短时频谱曲线变化趋势保持一致,如图2(a)所示情况,两条曲线为相邻两帧数据的频谱曲线,从图中可以看出,两帧数据的频谱曲线变化趋势基本相同。
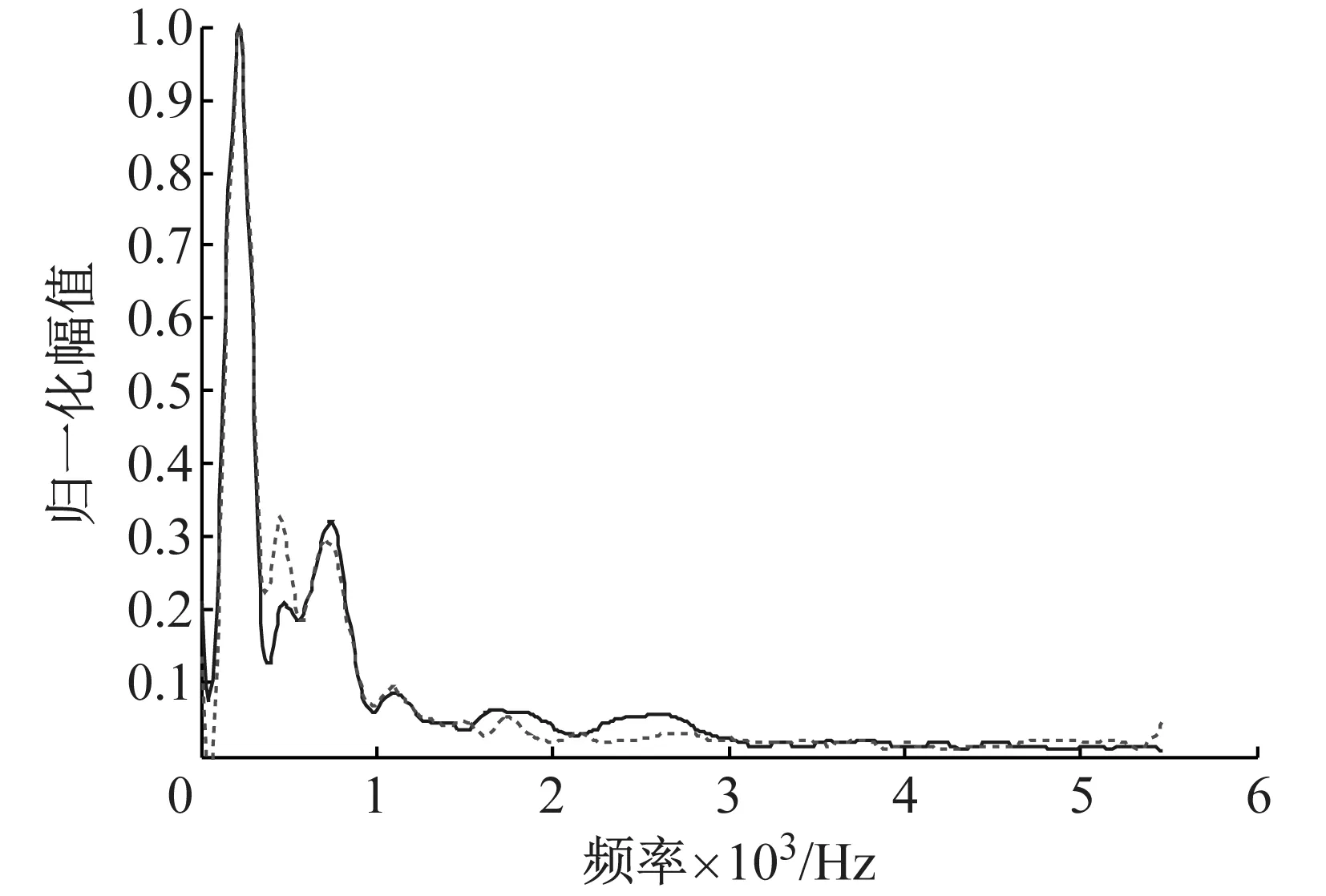
(a) 舰船辐射噪声相邻帧信号频谱分布曲线
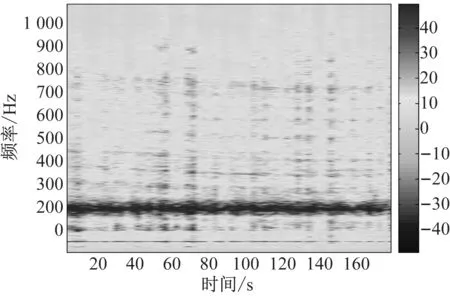
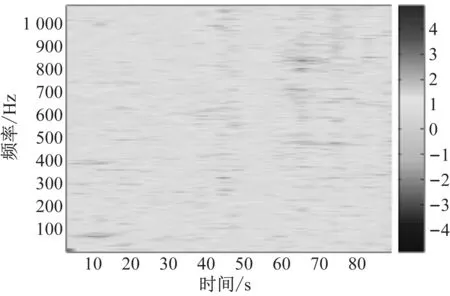
(b) 某型舰船辐射噪声LOFAR时频谱图
如图2(b)所示为某舰船实测辐射噪声在一段时间内的时频谱图,从图中可以看出,在一个持续的时间里,舰船辐射噪声的频谱分布表现出一个较好的稳定性。通过实测舰船噪声数据进一步实验验证,短时频谱稳定性在舰船辐射噪声中普遍存在,基于这一特征,文中采用中值滤波方法估计信号的功率谱中值,利用该功率谱中值实现对辐射噪声每帧信号功率谱进行白化处理。
设在进行被动声纳信号处理时,长度为q的信号片断为Ω(q),采用长度为K点,重叠Kov点的短时窗函数对Ω(q)分帧,并计算每一帧信号的短时傅里叶变换得到时频谱图G(k,n),
(1)
(2)


(3)
式中的向量相除运算为按元素计算。
如图3所示为某舰船辐射噪声在中值滤波预白化处理后的效果图,可见,预白化后的频谱分布符合高斯白噪声频谱分布特点,经过对实测舰船辐射噪声数据处理后的统计分析及后续实验验证,预白化后的舰船辐射噪声可以用均值为0,协方差矩阵为R(q)的高斯白噪声信号进行建模,即

(4)

1.2 鲸类联络叫声模分析
鲸类主要有联络叫声和回波定位信号(clicks)[18],由于回波定位信号主频较高,很多情况下超出被动声纳频带范围,文章仅针对与舰船辐射噪声频带重叠的能量集中在频率50~400 Hz之间的鲸类联络叫声信号进行检测。
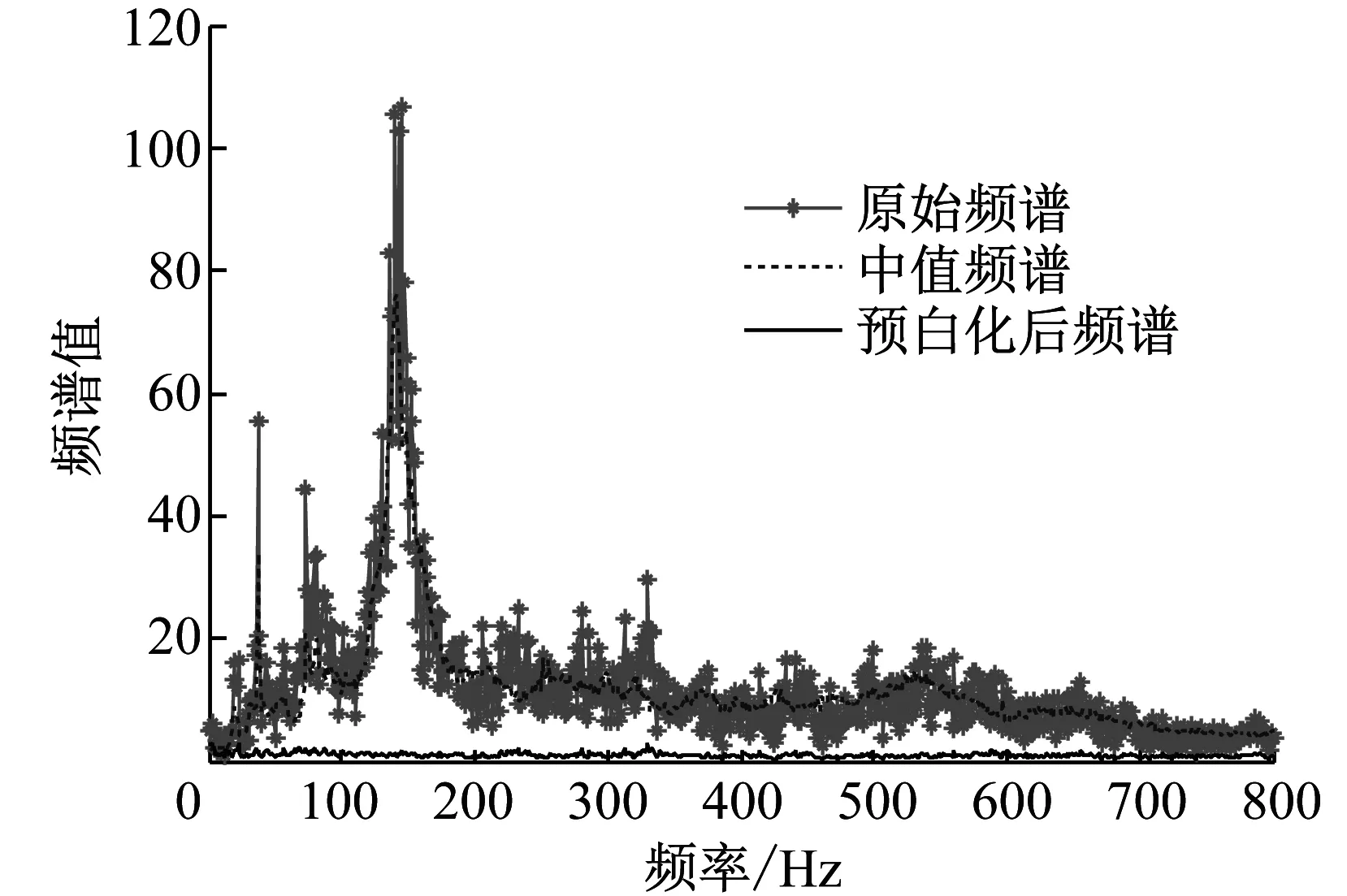
(a) 舰船噪声预白化过程
(b) 舰船噪声预白化结果时频谱图
在实测信号检测过程中,由于鲸类声信号自身的固有变化,其功率谱和先验概率往往是未知的,而且信号的频谱结构也会随着时间、季节、鲸的习性和外部环境因素的不同而有较大差异,但结合文献所述,对实测鲸联络叫声分析发现,如图4(a)所示,99%的露脊鲸联络叫声持续时间在0.3~1.5 s之间,并且频带能量集中在50~250 Hz[17],其时频谱图中能量集中在瞬时频率(Instantaneous Frequency, IF)附近的窄带范围内,且为正调频非线性调频信号[1],调制形式为随着时间的增加,主频逐渐减少;长须鲸、大须鲸和座头鲸的声信号也具有相似特征,其时频谱图中能量集中在瞬时频率附近的窄带范围内,且为负调频信号,调制形式为随着时间的增加,主频逐渐增大及频率稳定信号,如图4(b)、(c)和(d)所示。此类声信号频率调制部分的能量占据信号持续时间内总能量的30%~100%,文中采用三阶多项式相位信号(PPS)对此类鲸信号进行参数化建模[13]。
设鲸类声信号为s(t),则利用多项式相位信号对鲸类声信号进行建模:
(5)
式中,N为信号处理长度,

(a)露脊鲸声信号时频谱图(b)须鲸声信号时频谱图

(c)须鲸叫声时频谱图(d)座头鲸声信号时频谱图
图4 鲸类信号时频谱图特征
Fig.4 Time-frequency spectrogram of Whale Contact Calls
(6)
为多项式相位,φ0为信号初相位,在(0,2π)内均匀分布,fm为第m个系数,对于三阶PPS,f0为信号的起始频率,f1为信号线性调频成分的调频斜率,f2为信号非线性调频成分调频曲线的曲率,λ=(f0,f1,f2)T与鲸类声信号的时频特征相关,可根据实测声信号实验获得。根据信号的多项式相位表达式,可以很容易得到信号的瞬时频率:
(7)
瞬时频率描述了信号频率分布中频谱绝对值最大值对应的瞬时频率,在人工判读中具有重要的作用。
综上所述,通过多项式相位信号对鲸类声信号建模和高斯白噪声对预白化后的舰船辐射噪声建模,舰船辐射噪声中鲸类联络叫声检测转变为高斯噪声环境中未知参数三阶多项式相位信号的检测。
2 基于匹配滤波器的鲸类叫声检测方法
2.1 未知参量广义似然比统计量分析
设被动声纳接收信号为,x(t),t=1,2,…,N鲸类声信号为s(λ)=[s(1,λ),s(2,λ),…,s(N,λ)],则舰船辐射噪声中鲸类联络叫声的检测可表示为
(8)
式中:假设H0表示被动声纳仅接收到了舰船噪声信号,而假设H1则表示被动声纳接收到的信号中含有鲸类声信号。式中{A,λ}为未知非随机参数,未知参数广义似然比统计量可表示为
(9)
式中:P[x(t)|H0]和P[x(t)|H1]为两种假设下信号x(t)的概率密度函数。式中,{A,λ}可通过最大似然比进行估计计算。根据本文第2节对信号的建模分析,x(t)在两种假设下的概率密度函数可表示为
lnP[x(t)|H0]=-x(t)TR(q)-1x(t)/2+b
(10)
lnP[x(t)|H1]=-[x(t)-As(λ)]TR(q)-1[x(t)-As(λ)]/2+b
(11)


(12)
(13)
(14)
式(14)的分母不受到信号x(t)的影响,因而也不影响检测统计量的结构。联合式(11)~(14),基于广义似然比的检测统计量表示为
(15)
2.2 基于匹配滤波器的检测统计量实现
根据式(15)直接计算Λ(t)计算量很大难以实现,为此,引入复向量h(λ)[18]
(16)

(17)
式中,λm为给定的m=1,2,…,M个相位系数向量。式(17)可以看做信号s(λm)的匹配滤波器(MF),这样,未知参量的广义似然比统计量可以表示为
(18)
由于时域的卷积等效于频率相乘,式(17)可进一步写为频率域表达式为
(19)
式中:X(wi)为被动声纳信号的FFT,C(wi,λm)为第m个MF的频谱响应,而B2(wi)为舰船辐射噪声的功率谱密度,由于舰船辐射噪声信号已经进行预白化处理故式(19)可进一步简化为
(20)
联合式(18)和(20),可以利用匹配波滤器计算出鲸类声信号检测的广义似然比统计量,将统计量与计算得到的阈值进行比较,可以做出接收H0或H1的二元假设判断。阈值可以通过Neyman-Pearson优化准则计算得到,这里不作为重点。
3 鲸类联络叫声检测方法仿真及实验
为测试本文提出的检测算法的性能,实验分两个阶段,首先测试在无鲸类干扰声信号仅有舰船噪声情况下,算法对舰船辐射噪声检测的虚警率,以验证对舰船噪声建模是否合理;其次以合成信号为信号源,检测算法对舰船噪声环境下鲸类声信号的检测效果。
实验中实测数据主要使用在实验、演习及出海执行任务期间录制的各种舰船辐射噪声数据,共计100小时,录制设备包括船用被动声纳、声纳浮标及各种标准水听器。由于设备不同,信号频段各异,为统一信号频段,在实验前使用截止频率为40 Hz到300 Hz的Chebyshev I型IIR带通滤波器对所有辐射噪声数据进行滤波,滤波器截止频率的设置主要与后续检测鲸类干扰声信号相一致,滤波后数据的采样率降采样为2 kHz。匹配滤波器阶数设置为m=12[13],信号检测片断长度为1.5 s[17]。由于鲸类联络叫声获取的局限性,本文根据相关文献中对鲸类信息特征的分析,采用多项式相位λ∈Q(m)取值范围为
(21)
式中:Δf为频率分辨率,u(t,λm)由匹配滤波器计算得到。
3.1 舰船噪声中无鲸类干扰声信号时的检测实验
尽管本文工作重点是鲸类干扰信号的检测,但从图1所示被动声纳信号处理流程可知,本文工作的最终目标是利用剔除鲸类干扰信号后的舰船辐射噪声信号进行目标自主识别,因此,在鲸类干扰声信号未出现时,算法应确保舰船辐射噪声信号的正确判别。本节实验以不含有鲸类干扰声信号的多种舰型及工况下的实测舰船辐射噪声为实验对象,实验中对辐射噪声信号进行预白化处理,然后将预白化后的辐射噪声信号视为背景,对其中的鲸类干扰信号进行检测,以测试在无鲸类干扰信号时,算法将辐射噪声误判为干扰信号的虚警率,进而验证算法对舰船辐射噪声进行预白化处理并采用高斯白噪声进行建模的有效性。
实验分两部分进行,首先使用置信水平为0.05的非参数Kolmogorov-Smirnov(KS)检测方法[20]对预白化处理后的舰船噪声进行有无鲸类联络叫声干扰信号的检测实验,实验时根据数据的采样率和KS方法的参数设置将舰船辐射噪声数据分成8.192 s的实验片断43,945个,测试结果显示95.45%的实验测试片断无虚警报警;然后使用本文提出的基于广义似然比的方法对相同的辐射噪声片断进行虚警率检测实验,检测阈值使用Neyman-Pearson准则计算,检测参数使用式(21)给出的λ值,测试结果显示96.12%的实验片断无虚警报警。
实验采用两种方法对预白化处理后的舰船辐射噪声信号进行干扰信号检测,一方面,KS检测方法是海洋环境背景噪声下检测鲸类联络叫声信号的有效方法[14],采用该方法对预白化处理后的舰船辐射噪声信号进行干扰信号检测取得较低的虚警率而在图7中对未进行预白化处理的信号进行干扰信号检测时取得较差的检测效果,说明文中对辐射噪声信号的预白化处理是合理的;另一方面,采用本文方法对预白化处理的辐射噪声信号进行干扰信号检测,取得较低的虚警率,说明预白化方法对本文算法是适用的,也说明算法在信号中无鲸类联络干扰叫声时,可以确保舰船辐射噪声信号的正确判断,减少对后续目标识别的影响。
分析两次实验结果,并结合有经验的声纳员对声音信号及其声LOFAR谱图的判读,虚警的产生主要是因为舰船辐射噪声中出现了类似于鲸类声信号的短时瞬态噪声,包括环境强脉冲噪声、电缆噪声及部分鱼虾声音等,但对于实际应用,这些瞬时强脉冲噪声的存在,也会对目标自主识别信号处理造成影响,剔除这些噪声对目标自主识别是有利的。尽管由于数据获取的局限性,该实验并不能测试影响舰船辐射噪声中特征的所有因素,比如环境、气候、声速梯度、被动声纳位置、舰船自噪声等,但从实验结果可以得出预白化方法对舰船辐射噪声进行预处理,满足文中算法对鲸类干扰声信号的检测以及后续目标识别的要求。
3.2 鲸类干扰声信号检测率实验
为了测试算法在舰船辐射噪声背景下对鲸类信号的检测率,对实验数据进行了如下合成,首先将3.1节实验使用的舰船辐射噪声中检测的突变干扰噪声剔除,以消除背景噪声对检测结果的影响,其次,对获得的海洋环境噪声背景下的鲸类噪声信号通过有经验的声纳员的听音和时频LOFAR谱图辅助判断,获得清晰的鲸类联络叫声信号,然后对舰船背景噪声信号与鲸类联络叫声信号按式(22)的平均分段信噪比进行混合,混合过程及结果如图5所示。对检测得到的鲸类声信号,根据式(3)得到其瞬时频率,再利用相关方法估计出其信号的持续时间,以原鲸类信号的持续时间左右各加0.5 s为一个信号窗,以检测到的信号位于该信号窗内为正确检测信号(如图5第四个子图中的虚线框为正确检测结果),计算实验中鲸类信号的检测率。如图6所示,为在给定虚警率为10-2、10-3和10-4下的检测率结果,图中横轴为合成信号的信噪比,其值为0~10 dB并以0.25 dB为步长变化,纵轴为检测率。从图中可以看出,不同虚警率下,检测率随着信噪比增大而升高。

(22)
式中:M为信号分段数;N为一段信号的长度;Nn为一段信号的起始点;x(n)为鲸类联络叫声信号而y(n) 为舰船辐射噪声。
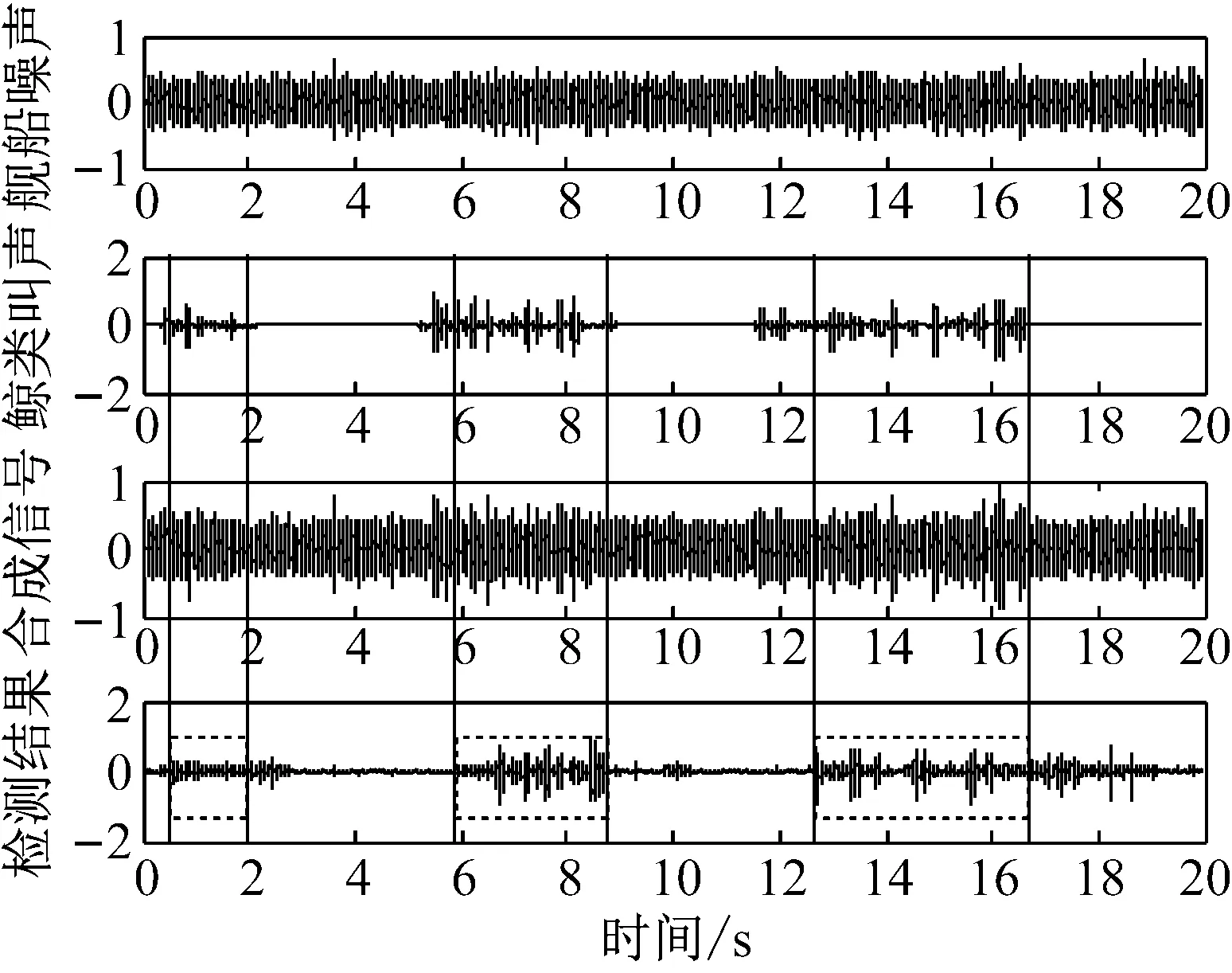
图5 鲸类联络叫声信号与辐射噪声结果图
为了进一步验证本文算法的检测结果,文中使用上述实验数据选取分段信噪比6 dB,测试了基于能量检测方法、KS检测方法和基于“边缘”的检测方法[17],并将检测结果与本文算法进行了比较,结果ROC曲线,如图7所示。
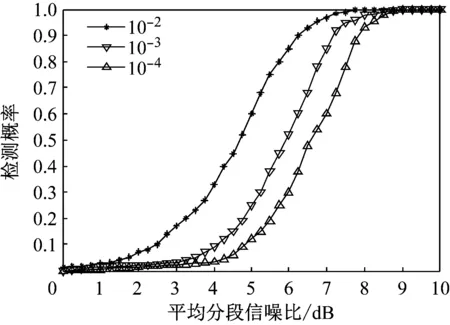
图6 不同分段信噪比下检测率
从图7中可以看出,在给定分段信噪比为6 dB时,相比其他几种检测方法,本文算法取得了较好的检测效果,在检测率位于(0.75,0.9)内,本文算法取得最小的虚警率。基于“边缘”的检测方法使用一个离散统计量d(t)∈(0,1,…,9),将鲸类联络叫声量化为0到9共十个量级,分别表示声信号质量最差和最好,其使用了与本文算法不同的频率调制模型,因而,在检测率小于0.75时,其获得最小的虚警率,但如图7所示,当检测大于0.8时,其虚警迅速增大,这主要由其模型造成的。KS方法检测效果最差,这主要是因为KS方法对强信号或强突变信号检测效果敏感。通过实验对比分析,可以得出,在给定虚警率下,本文算法获得较高的检测效果。
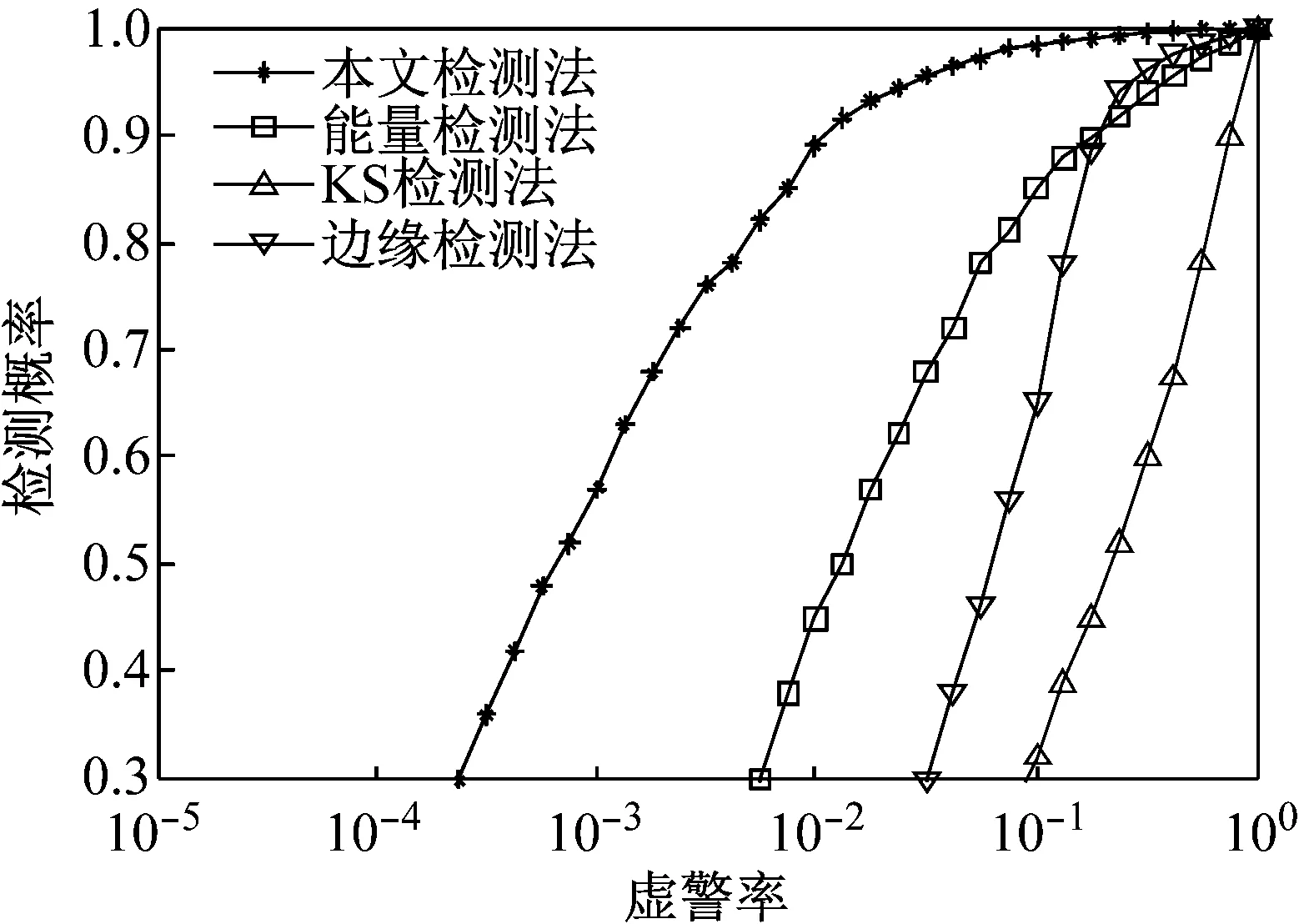
图7 不同虚警率下的检测率(分段信噪比为6 dB)
从实验结果可以得出,在给定的舰船背景噪声下,本文提出的基于舰船辐射噪声信号预白化处理的的检测方法可以实现较高的鲸类联络叫声信号检测率,同时能保持对舰船辐射噪声信号低虚警率,以确保有用的舰船辐射噪声信号可以到达如图1所示流程的目标识别阶段,有利于目标自主识别性能的提高。
4 总 结
本文在分析舰船辐射噪声短时频谱稳定性特征的基础上,通过预白化处理实现舰船噪声进行了高斯建模,并通过实测被动声纳舰船噪声数据对建模的有效性进行了实验验证;通过三阶多项式相位信号对鲸类联络叫声进行建模,进而通过广义似然比检测实现了舰船辐射噪声环境下鲸类联络叫声信号的检测,实验及比较结果分析显示,本文提出的算法在给定虚警率下可以获得较好的检测率,为后续被动声纳干扰信号的剔除和自动目标识别的实现做好准备。
[1] URAZGHILDIIEV I,CLARK C W. Detection and recognition of north atlantics right whale contact calls in the presence of ambient noise[J].IEEE Journal of Oceanic Engineering, 2009, 34(3):358-368.
[2] 汪德昭, 尚尔昌. 水声学[M]. 北京:科学出版社, 2013,7.
[3] BERCHOK C L, BRADLEY D L, GABRIELSON T B, et al. Lawrence blue whale vocalizations revisited: Characterization of calls detected from 1998 to 2001[J]. Journal of the Acoustical Society of America, 2006, 120(4):2340-2354.
[4] GILLESPIE D, CHAPPELL O. An automatic system for detecting and classifying the vocalizations of harbour porpoises[J]. Bioacoustics:The International Journal of Animal Sound and its Recording, 2002, 13(1):37-61.
[5] GILLESPIE D, LEAPER R, CLARK C W, et al. Right whale acoustics: practical applications in conservation[C]. International Fund for Animal Welfare, Yarmouth Port, MA, 2001:23.
[6] MELLINGER D K, CLARK C W. A method for filtering bioacoustics transients by spectrogram image convolution[J]. Oceans’93. Engineering in Harmony with the Ocean, 1993, 3:122-127.
[7] MELLINGER D K. Handling time variability in bioacoustics transient detection[J]. Oceans’93. Engineering in Harmony with the Ocean, 1993, 3:116-121.
[8] MUNGER L, MELLINGER D, WIGGINS S, et al. Performance of spectrogram cross-correlation in detecting right whale calls in long term recordings from the Bering See[J]. Canadian Acoustics, 2005, 33(2):25-34.
[9] MELLINGER D K. A comparison of methods for detecting right whale calls[J]. Canadian Acoustics, 2004, 32(2):55-65.
[10] ERBE C. Detection of whale calls in noise: Performance comparison between a beluga whale, human listeners, and a neural network[J]. Journal of the Acoustical Society of America, 2000, 108(1):297-303.
[11] GILLESPIE D. Detection and classification of Right Whale calls using ’edge’ detector operating on a smoothed spectrogram[J]. Canadian Acoustics, 2004, 32(2):39-47.
[13] URAZGHILDIIEV I, CLARK C W. Acoustic detection of North Atlantic Right Whale contact calls using spectrogram-based statistics[J]. Journal of the Acoustical Society of
America, 2007, 122(2):769-776.
[14] URAZGHILDIIEV I, CLARK C. Acoustic detection of North Atlantic right whale contact calls using the generalized likelihood ratio test[J]. Journal of the Acoustical Society of America, 2006, 120(4):1956-1963.
[15] HSU C L, JANG J S. On the improvement of singing voice separation for monaural recordings using the MIR-1K Dataset[J]. IEEE Transactions on Audio Speech and Language Processing, 2010, 18(2):310-319.
[16] DURRIEU J E, DAVID B, RICHARD G. A musically Motivated Mid-level Representation for Pitch Estimation and Musical Audio Source Separation[J]. IEEE Journal of Selected Topics in Signal Processing, 2011, 5(6):1180-1191.
[17] PARKS S E, TYACK P L. Sound production by North Atlantic right whale (Eubalaena glacialis) in surface active groups[J]. Journal of the Acoustical Society of America, 2005, 117(5):3297-3306.
[18] 郭龙祥,梅继丹,张亮. 鲸豚类动物声信号的分析与识别[J]. 声学技术, 2011, 30(3):64-66.
GUO Longxiang, MEI Jidan, ZHANG Liang. Analysis and identification of cetacean sounds[J]. Technical Acoustic, 2011, 30(3):64-66.
[19] MARPLE S L. Digital spectral analysis with applications[M]. Englewood Cliffs, NJ, US, Prentice-Hall, Inc., 1987: 55-69.
[20] LA COUR B R, LINFORD M A. Detection and classification of North Atlantic right whales in the Bay of Fundy using independent component analysis[J]. Canadian Acoustics, 2004, 32(2):48-54.
[21] ERBE C, KING A R. Automatic detection of marine mammals using information entropy[J]. Journal of the Acoustical Society of America, 2008, 124(5):2833-2840.
[22] OSHEA P. A fast algorithm for estimating the parameters of a quadratic FM signal[J]. IEEE Transactions on Signal Processing, 2004, 52(2): 385-393.
Automatic detection of whale contact calls in background of ship-radiated noise
LI Dawei1,2, YANG Rijie1, HAN Jianhui1, GONG Jianwen1
(1. Department of Electronic Information Engineering, Naval Aeronautical Engineering Institute, Yantai 264001, China;2. the 95972 Unit of PLA, Jiuquan 735018, China)
Some whale contact calls are mis-detected as ship-radiated noise by a ship’s passive sonar due to their frequency bands overlapping. So, these whale calls should be detected correctly and eliminated to improve the further target autonomous recognition. Here, a two-stage whale calls detection algorithm was proposed. In the first stage, whale calls were modeled with the polynomial phase signal and the ship-radiated noise was modeled with the local stationary Gaussian random process after pre-whitened based on its frequency stability. Then whale contact calls were detected using the generalized likelihood ratio detection method based on matched filters. The test results based on a great many measured data showed that the proposed method is applicable for various types of ships; compared with another three detection methods, the proposed method is superior to the other three ones, and can achieve a higher whale calls detection rate under a certain false alarm rate.
whale contact calls; ship-radiated noise; polynomial-phase signals; pre-whitening treatment; generalized likelihood ratio detection
国家自然科学基金(61271444);“泰山学者”建设工程专项经费资助(2011)
2016-01-07 修改稿收到日期:2016-04-15
李大卫 男,博士,工程师,1983年3月
杨日杰 男,博士后,教授,1963年9月
TN912.35
A
10.13465/j.cnki.jvs.2017.11.023
