多路相干导航卫星信号模拟方法
2017-06-10郭超云
郭超云,路 辉
(北京航空航天大学 电子信息工程学院,北京 100191)
多路相干导航卫星信号模拟方法
郭超云,路 辉
(北京航空航天大学 电子信息工程学院,北京 100191)
为了进一步研究导航测姿中多路相干GNSS信号模拟方法,根据相干信号定义,提出基于矢量投影理论生成相干GNSS信号的方法:给出相干信号模拟器的数学模型,根据矢量投影理论计算延时时间并将其折算到载波与伪码生成模块中,然后给出多路相干GNSS信号的实现原理,最后在GNSS模拟器中实现多路相干GNSS信号。实验结果表明:经由伪距差值分析得到的多路相干GNSS信号延时误差保持在合理范围内,实时动态载波相位差分得到的基线解算结果与设定的基线长度在mm级误差范围内相一致,生成的多路相干GNSS信号能够满足基线解算平台的测试要求,为姿态测量提供前提条件。
相干GNSS信号;GNSS模拟器;基线矢量;姿态测量
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)在相对定位、基线解算、姿态测量等领域应用广泛。对于飞机、舰船、车辆、雷达等载体的运动姿态测量,利用GNSS信号相对定位结果解算载体测姿,相较传统惯导测姿具有实时性高、维护成本低、受环境影响小等优势。测姿等应用中多台接收机在同一时刻接收到的同一颗卫星发射的导航信号视为相干信号,接收机间通过相干信号完成相对定位;因此多路相干GNSS信号是完成导航测姿等应用的前提条件,也是检测测姿等设备性能的重要手段。目前,测姿系统可利用接收机完成检测,不同应用场景的测姿设备需要提供相应场景下多路相干GNSS信号的模拟环境。本论文研究基于GNSS模拟器的多路相干GNSS信号模拟方法。
目前在国内外已有相关研究,美国思博伦(Spirent)GSS9000模拟器可生成全球定位系统(global positioning system,GPS)、格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)、伽利略卫星导航系统(Galileo navigation satellite system,Galileo)和北斗卫星导航系统(BeiDou navigation satellite system,BDS)信号并支持国际海运事业无线电技术委员会(Radio Technical Commission for Maritime services,RTCM)差分数据[1];CAST Navigation公司CAST-5000型波前模拟器可以根据1个参考点独立生成4个相干模拟信号[2];德国IfEN公司NavX©-NCS GPS/GNSS模拟器可应用于多星座/多频点的全球卫星导航系统中[3];国内湖南矩阵电子公司的GNS8460型多波束模拟器可应用于抗干扰测试、测姿等领域[4];华力创通HWA-RNSS-7500多天线型卫星导航信号模拟器可同步输出多个天线的卫星导航模拟信号[5]。
可以看出,国内外已有厂商涉及多路相干模拟器研究领域;但由于商业保密性该领域公开发表的内容甚少。为进一步研究相关内容,本文提出关于多路相干GNSS信号实现方法并在GNSS模拟器中加以实现。
1 相干信号
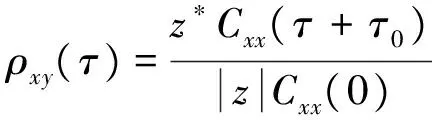
随机信号x(t)和y(t)的关联程度由互相关系数衡量,互相关系数为

(1)

Cxy(τ)=E{[x(t)-μx][y(t-τ)-μy]*}=
z*E{[x(t)-μx][x(t-τ-τ0)-μx]*}=
z*Cxx(τ+τ0);
(2)
Cyy(0)=E{[y(t)-μy][y(t)-μy]*}=

(3)
式中:E为求期望符号;μx和μy分别为x(t)和y(t)的均值;Rxx(0)为自相关函数Rxx(τ)且τ=0;z*为复常数z的共轭。因此,式(1)可表示为
(4)

2 相干信号模拟器生成
载体姿态测量一般应用于无人机、航天器、汽车等运动的载体上。载体姿态测量时首先解算出接收机间的基线矢量,其解算结果精度通常要求在mm级;然后通过基线矢量计算相应的姿态角。码的观测精度与比载波相位的观测精度相比,通常相差3个数量级,其对基线解的精度贡献很小,利用GNSS载波相位可达到精度要求。
测姿平台利用多路相干GNSS载波相位获得高精度的相对定位结果,并由此得到基线矢量,通过基线矢量可得到载体姿态角度,从而完成载体姿态测量。因此,GNSS模拟器能够生成多路相干的GNSS载波信号,可作为解算基线矢量与载体测量姿态平台的模拟源。利用卫星导航信号实现测姿平台的重点是利用多路相干GNSS载波信号,其中载波延时的精确控制又是生成多路相干GNSS载波信号的关键。在解算基线矢量时,码观测量起到辅助估计载波的整周模糊度的作用。
多路相干GNSS载波信号间的差别体现在载波信号间的微小延时量。通过矢量投影的方法可以计算出载波间延时量Δt的大小,在载波DDS中控制生成多路、具有延时量Δt的载波信号是实现多路相干GNSS模拟器关键。
2.1 矢量投影方法
同一时刻下同一颗导航卫星信号到达多个接收机的接收端时,导航卫星信号空间传输情况如图1所示。

以图1(a)情况为例,图2为图1(a)2路信号空间传输过程简化图。
图中基准站接收机m为参考点。t0时刻同一颗卫星s的信号已经到达基站接收机m,此时移动站接收机u还未接收到信号;在t1时刻,即卫星s的信号经过t1—t0的延时后,到达移动站接收机u:因此将基准站接收到的信号经过一定的时延后便可与移动站接收机接收信号完全重合,故2路信号为相干信号。
若存在多个接收机与基准站按短基线间距放置,则存在多路到达移动站接收机与基准站的相干GNSS信号。以基准站m为参考点,同一时刻同一颗导航卫星信号到达移动站接收机u的距离相比于到达基准站接收机m的距离相差ΔL;因此,产生多路相干GNSS信号首先产生参考点基准站m处信号,然后对该信号进行相应时延处理。
时延计算采用矢量投影方法,首先计算观测矢量ls。如图1所示:(xs,ys,zs)为卫星s在地心地固直角坐标系中的位置;基准站接收机m坐标为(xm,ym,zm);移动站接收机u坐标为(xu,yu,zu),则移动站u到卫星s的观测矢量为

(5)
卫星s在移动站接收机u处的单位观测矢量为
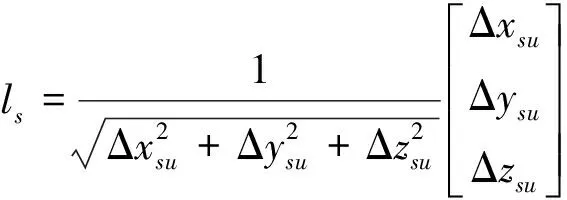
(6)
移动站-基站矢量为

(7)
相干信号间的波程差ΔL为

(8)
延时时间为

(9)
式中:c为光速,移动站接收机u处导航信号比基准站导航信号延时Δt。短基线情况下,延时量不会超过1个码片。
2.2 相干信号在GNSS模拟器中生成方法2.2.1GNSS模拟器信号模型
卫星发射导航信号与接收机接收导航信号在地心地固直角坐标系统的空间关系如图3所示。
导航卫星在s处发射的信号统一描述为ST(t),表示为
ST(t)=A(t)ej(ωt+φ0)。
(10)
式中:A(t)表示被调信号;ω为载波角频率;t为时间;φ0为信号初始相位[8]。
导航信号到达接收机处时信号模型为
SR(t)=kA(t-τ(t))ej{ω0[t-τ(t)]+φ0}。
(11)
式中:τ(t)表示在忽略电离层与传输层对信号影响的情况下,信号在传输过程中带来的延时;k为衰减系数,表明导航卫星信号经空间传输后信号强度减小。τ(t)可以表示为
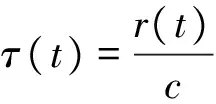
(12)
式中:r(t)表示空间几何距离;c为光速。r(t)物理计算方程为
r(t)=

(13)
式(13)为非线性函数。因此,将式(13)在tN时刻泰勒展开可表示为

(14)
式中:tN表示第N个参数更新时刻;r(n)(tN)表示在tN时刻空间几何距离的n阶导数。忽略式(14)的高阶项影响,r(t)可近似表示为
r(t)≈r(tN)+r(1)(tN)(t-tN)+

(15)
式中:r(1)(tN)表示速度v(tN);r(2)(tN)表示加速


(16)
GNSS模拟器即按式(11)数学模型生成带有延时τ(t)的卫星导航信号[9]。
2.2.2 相干GNSS信号生成原理
以GPSL1波段上民用C/A码信号为例,相干GNSS信号数字中频生成原理如图4所示。
图4中:上位机计算载波、伪码、电文等参数值并下发至下位机;下位机接收传来的参数信息经伪码生成模块、电文生成模块产生数字基带信号并与载波生成模块产生的载波信号调制产生被调信号。式(11)数学模型中表明模拟τ(t)延时量是模拟器的重要内容,伪码模块、载波生成模块即生成带有延时量τ(t)的信号;式(16)延时量τ(t)3次多项式的特性表明:带有延时τ(t)的数字基带信号和数字载波信号可以采用3阶直接数字式频率合成器(directdigitalsynthesizer,DDS)控制生成,其中生成的数字载波信号结构如图5所示。
图5中:上位机计算输入参数ki,i=0,1,2,3,控制3阶DDS的输出相位序列,最终使载波信号延时输出。对式(16)以tN为采样原点坐标[10],并与3阶DDS结构输出相位序列综合分析,得到延时控制参数ki,i=0,1,2,3。计算式为
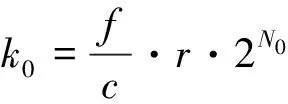
(17)
式中:f表示信号发射速率;c为光速;N0为相位累加器位数[11];r为初始更新时刻的卫星与接收机间的距离量。以基准站为参考点,卫星s信号到达移动站接收机时与参考点距离相差ΔL。根据矢量投影方法可以计算出ΔL,以基准站k0为参考值,将ΔL折算至k0计算出生成移动站接收机信号的控制参数

(18)
则2个载波模块间生成的相应的载波信号间即存在Δt的时延信息。
伪码生成原理与此类似。伪码时延控制同样采用3阶DDS,通过3阶DDS可以实时控制生成码相位,由此产生伪码计数,该伪码计数即为该卫星伪码在码表的位置。通过伪码计数值确定码表中伪码值从而产生该时刻的伪码值,如图6所示。

图6 伪码产生原理
图6中,多路相干GNSS信号伪码产生模块中3阶DDS与载波相似由3个相位累加器构成,参数控制与载波类似。此外每颗卫星的伪码信息已知,因此可以提前将其存储于现场可编程门阵列(field-programablegatearray,FPGA)的存储块(blockmemory)中。
3 实验与结果分析
以B1I信号为例,在不同基线情况下生成2路相干GNSS信号,如图7所示。基线解算软件采用实时动态(real-timekinematic,RTK)载波相位差分技术实时分析2路相干GNSS信号的载波相位特性,根据2路信号间载波相位差解算基线长度。
通过多路相干GNSS信号进行基线解算时,首先利用原始的载波相位以及码伪距量建立数学模型,接着求解整周模糊度,然后利用估计的整周模糊度解算基线向量。基线解算时,通过相应的准则使得整周模糊度的浮点解映射为整周模糊度的固定解。通过利用C-LAMBDA算法进行的基线解算过程如图8所示。
3.1 移动站与基准站间零基线解算验证
1)测试方法
导航模拟器中设置参考点和移动站在纬经高坐标系中的位置坐标均为:(39.979 047 458 6°,116.344 406 225 6°,98.011 8m),此时理论基线长度为0m,测试时间约为1h30min。2路中频信号分别经上变频输出中心频率为1 561.098MHz的相干GNSS信号,输出功率在-100dBm左右,将相干信号接入基线解算平台。
2)实验结果
首先根据主站与移动站间伪距差分析信号生成精度。主站接收机m与移动站接收机u接收到2路相干142号星信号,2接收机观测伪距情况如表1所示。
将生成的2路相干GNSS信号接入基线解算平台解算基线矢量。表1数据来自基线解算平台中商用接收机的观测值。在模拟器中设定移动站与主

表1 零基线主站移动站141号星伪距信息
站为零基线;因此产生的2路相干GNSS信号即主站接收机与移动站接收机处的信号应当完全一致。主站伪距与移动站伪距在任何一时刻下都应当相等,理论上二者的差为0。然而表1表明,在观测时间内,任一观测时刻得到的伪距误差Δρmu为理论值同主站伪距与移动站伪距差的差值,即
Δρmu=0-(ρm-ρu)。
(19)
零基线时对表1中所有观测时间下伪距误差大小Δρmu取平均值,则142号星伪距误差其均值(绝对值)为0.478 m,误差均值占码片长度为0.327 %,因此根据伪距分析得到142号星的伪距误差值1.598 ns。
基线解算结果稳定后,基线解算平台通过载波相位差分技术得到的基线大小如图9所示。
验证结果表明:在测试时间内单频2路GNSS信号基线解算后的误差均值为0.002 3 m,方差为1.051×10-6,解算精度较高;但基线解算结果并非完全为0 m,这与设备硬件延时等情况有关。基线解算采用载波相位差分技术,其解算结果精度较高,表明模拟器生成的2路相干GNSS信号满足测试零基线情况的要求。
3.2 移动站与基准站间2 m基线解算验证
模拟器中设置参考点坐标的纬经高坐标为(39.979 047 458 6°,116.344 406 225 6°,98.011 8 m),移动站纬经高坐标为(39.979 047 458 6°,116.344 429 639 9°,98.011 8 m),理论基线长度约为2 m,测试时间约为2 h,其他设置与零基线情况相同,测试结果如表2所示。
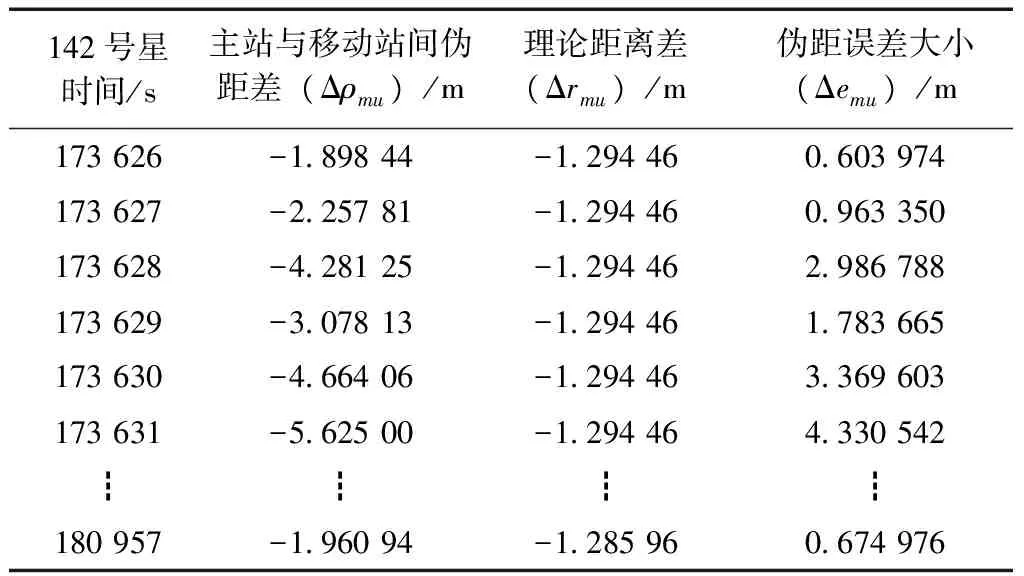
表2 基准站与移动站2 m基线142号星伪距信息
表2中,在2 h观测时间内任一观测时刻(s)主站与移动站间伪距差Δρmu通过处理基线解算平台中主站与移动站的商用接收机伪距观测值得到。理论距离差值误差Δrmu通过模拟器上位机程序计算输出主站与移动站在对应观测时刻下的理论距离差值得到,伪距误差大小
Δemu=Δrmu-Δρmu。
(20)
基线长为2 m时,对所有观测时间下伪距误差大小Δemu取平均值,则142号星解算的伪距误差均值(绝对值)为0.070 9 m,误差均值占码片长度为0.048 %,因此根据伪距分析得到142号星的伪距误差值0.236 ns。同样根据载波相位差分技术分析基线长度。
实验表明,在测试时间内单频2路B1I信号,解算结果在2 m左右波动,基线解算的均值为1.999 7 m,方差为1.147×10-6m2,解算精度较高,满足基线解算mm级精度要求。由于测姿需要准确解算出基线矢量,因此生成的该2路相干GNSS信号同样满足测姿系统精度要求。
4 结束语
本文分析在相对定位、基线解算、姿态测量等应用领域中多路相干信号的特点。论文提出采用矢量投影的方法,以基准站为参考点计算信号到达移动站处的延时时间来用于生成多路相干信号。根据多路相干GNSS信号数学模型的特点,在模拟器中实现了多路相干GNSS信号模拟方法,误差满足测试设备要求,能够为检测相应设备提供模拟源。目前生成的多路相干信号间均为静止状态,下一步将研究对检测姿态变化设备十分重要的动态情况。
[1] SPIRENT. GSS9000 GNSS constellation simulator datasheet[EB/OL]. (2016-03)[2016-08-17]. http://www.spirent.cn/-/media/Datasheets/Positioning/Brochures/GSS9000.pdf.
[2] CAST Navigation, LLC. CAST-5000 GPS wavefront generator[EB/OL].[2016-08-17]. http://www.castnav.com/cast_pdf/cast_5000.pdf.
[3] IfEN. NavX®-NCS professional simulators datasheet[EB/OL]. (2013-08)[2016-08-17]. https://www.ion.org/ gnss/upload/files/956_Datasheet.NavX-NCS-PRO-for-PDF_August2013_Letter.pdf.
[4] 湖南矩阵电子科技有限公司. 多波束导航信号模拟器[EB/OL].[2016-08-17]. http://www.matrix-sirc.com/productDetail.aspx?nid=385.
[5] 北京华力创通科技股份有限公司. HWA-RNSS-7500多天线型卫星导航信号模拟器[EB/OL].[2016-08-17]. http:// www.hwacreate.com.cn/products_detail/&productId=189.html.
[6] 张贤达. 现代信号处理[M]. 北京:清华大学出版社有限公司,2002:15-17.
[7] 谢钢. GPS 原理与接收机设计[M]. 北京:电子工业出版社,2009:168.
[8] 舒展, 王迪. 多系统卫星导航信号软件模拟器体系设计[J]. 电子设计工程, 2014, 22(13): 48-51.
[9] 刘旻, 吴嗣亮. 实时高动态 GNSS 信号模拟器高精度伪距生成方法[J]. 北京理工大学学报, 2011, 31(9): 1053-1057.
[10]陈向东, 高青, 郭莉莉. 卫星导航信号高精度模拟产生与控制技术[J]. 测绘科学技术学报, 2010, 27(3): 165-168.
[11]宋媛媛, 曾大治, 曾涛. 基于三阶 DDS 的卫星信号多普勒模拟方法[J]. 北京理工大学学报, 2010, 30(10): 1213-1216.
Simulation of multi-channel coherent navigation satellite signals
GUOChaoyun,LUHui
(School of Electronic Information and Engineering, Beihang University, Beijing 100191, China)
In order to further study on the simulation of multi-channel coherent GNSS signals, the paper proposed to generate the coherent GNSS signals based on the theory of vector projection according to the definition of coherent GNSS signals: the mathematical model of coherent signal simulator was given, the delay time based on vector projection theory was calculated and converted into the generated module of pseudo-code and carrier, thus the schematic diagram was designed for achieving multi-channel coherent GNSS signals; finally the multi-channel coherent GNSS signals were achieved in GNSS simulator.Experimental result showed that the delay error of multi-channel coherent GNSS signals by analyzing the pseudo-range difference could be in a reasonable range, the baseline solution results obtained by RTK could be consistent with the set baseline length within millimeter range of error, and the generated multi-channel coherent GNSS signals could meet the testing requirements of baseline solution platform, which would provide a precondition for attitude measurement.
coherent GNSS signals; GNSS simulator; baseline vector; attitude measurement
2016-08-16
郭超云(1992—),男,陕西西安人,硕士研究生,研究方向为卫星导航信号模拟器。
路辉(1977—),女,黑龙江肇东人,博士,教授,研究方向为信息系统模拟、测试、优化与评估等。
郭超云,路辉.多路相干导航卫星信号模拟方法[J].导航定位学报,2017,5(24):65-71.(GUOChaoyun,LUHui.Simulationofmulti-channelcoherentnavigationsatellitesignals[J].JournalofNavigationandPositioning,2017,5(2):65-71.)DOI:10.16547/j.cnki.10-1096.20170212.
P
A
2095-4999(2017)02-0065-07
