飞行载体自主着陆导航技术的现状与趋势
2017-06-10李丰阳贾学东
李丰阳,贾学东,董 明
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.地理信息工程国家重点实验室,西安 710054;3.卫星导航工程中心,北京 100094)
飞行载体自主着陆导航技术的现状与趋势
李丰阳1,2,贾学东1,董 明2,3
(1.信息工程大学 导航与空天目标工程学院,郑州 450001;2.地理信息工程国家重点实验室,西安 710054;3.卫星导航工程中心,北京 100094)
为了进一步研究飞行载体着陆导航系统的建设,首先论述自主着陆的概念及意义,并回顾卫星导航和视觉测量2种基于单一导航手段的自主着陆研究进展,然后重点分析飞行载体自主着陆的多源导航信息融合发展现状,最后归纳出飞行载体自主着陆导航技术的发展趋势。研究结果可为多源导航信息融合在自主着陆系统中的应用提供参考。
自主着陆;视觉导航;惯性导航;组合导航;多源信息融合
0 引言
自主着陆是指飞行载体在降落阶段,将机载设备得到的所有有用信息通过一定技术手段综合处理,快速获取稳定性强、信息充分的降落信息,使飞行载体在复杂环境下自主完成降落。
将着陆过程交由导航系统自主处理,极大地提高了工作效率,从复杂的仪表仪器指标的监测转换为简洁的飞行状态屏显的判读,有效地减轻了地面工作人员及机组人员的工作负担,降低了着陆的危险性;同时,随着科学技术的日新月异,微型飞行器呈井喷式的增长为空域管理安全埋下了极大的隐患,显然,非专业级的消费市场对快速、稳健的自主着陆技术需求非常迫切;此外,现代化战争正向高精度、无人化、远程打击方向发展,在以非对称、非接触、非线性为特点的未来作战模式中,飞行载体自主着陆技术可实现无人载体快速开辟机降场地的技术,为敌后无人化军事行动的实现提供可能。
自主着陆作为飞行载体高精度、无人化发展的重要支撑技术,其事故风险高、对导航的需求明显,作为飞行任务的末端环节,具有与其他飞行阶段完全不同的导航需求[1-2],俨然成为了整个飞行任务的重中之重。目前,围绕无人化、自主化的安全、快速、稳健的着陆导航需求,国内外已相继开展了一系列基于单一导航系统的飞行载体自主着陆技术,并显现出基于多源导航信息融合的研究新趋势。
1 基于单一导航手段的自主着陆
1.1 基于卫星导航系统的自主着陆
飞行载体自主着陆技术始于大型飞机的精密进近,限于通信和导航技术的发展阶段,早期的飞行载体着陆系统大多利用无线电信号对环境进行定位来控制飞行载体着陆在指定区域。基于传统无线电引导的自主着陆系统主要分为2个阶段即仪表着陆系统(instrument landing system,ILS)和微波着陆系统(microwave landing system,MLS)。随着卫星导航技术的不断成熟,基于卫星的着陆系统逐渐成为研究热点,并很快应用于大型飞机。其通过从多颗卫星发送的电磁信号中解析并提取有效导航信息,根据空间后方交会原理得到载体与地面的位置关系,为飞行载体提供高精度的绝对导航信息[3]。
2004年,中国电科研制出国内首套卫星导航的地基增强(ground-based augmentation systems,GBAS)着陆系统。通过采集全球卫星导航系统(global navigation satellite system,GNSS)和 GBAS信号,获取伪距、完好性以及GBAS相关数据,根据差分修正信息,引导载体进近。该系统已在国内多家机场累积试飞测试80余架次,效果良好。此外,相关学者也针对GNSS/伪卫星组合的进场着陆系统进行了研究[4-5]。
2010年,美军国防部[6]发布联合精密进场着陆系统(joint precision approach and landing system,JPALS)发展规划。作为典型的星基着陆系统,JPALS分别解算出载体与地面上的全球定位系统(global position system,GPS)接收机的相对位置,利用局域载波相位差分实现多机种自主着陆,着陆精度2.0~4.0 m(95 %)。
相比于传统无线电引导着陆,基于卫星的自主着陆对地面设备依赖性相对较低,经济效益明显;在卫星信号体制的基础上,对传递信息进行数据处理,工作模式与传统无线电不同,因此可以实现多系统的兼容互操作。但是,无线电信号的传播体制决定了:其一,信号在传播过程中易受到各类障碍物和接近频段电磁波的影响,导致定位精度急剧降低;其二,卫星导航系统受到所属国家的严格控制,虽在和平时期未对卫星系统的使用加以限制,但为战时应用埋下了隐患。
1.2 基于视觉测量的自主着陆
近年来,计算机视觉随着计算机技术、传感器制作工艺等的发展,从中衍生出视觉导航技术,其被认为是解决飞行载体快速稳定着陆最有前途的方式之一。
基于视觉测量的自主着陆系统根据着陆平台的不同分为机载和地基2种。机载着陆系统将视觉等多种机载导航信息融合,通过已知地面特征获取载体位姿,大多应用于旋翼式飞机;地基着陆系统是根据位置固定的相机测量载体,从外部对机载导航系统的可靠性进行检验。
21世纪初,基于合作目标的视觉导航在飞行载体着陆导航中的研究陆续展开。2002年,文献[7]设计了1.22 m×1.22 m的“H”型着陆标志,在7次飞行试验中,着陆位置误差为0.4 m,相对方位精度为7°。2007年,文献[8]提出基于红外视觉的无人机自主着陆“T”型合作目标,平均辨识时间为0.017 2 s。2008年,文献[9]设计了新型双圆图案着陆平面靶标,最终特征提取及标记耗时小于0.009 s,单轴位置的均方根误差(root mean square,RMS)小于0.06 m,姿态RMS小于0.7°(距靶标10 m)。
2009年,文献[10]创新性地提出了地基摄像测量系统的思想,利用摄像测量的方法实时测量飞机与地面环境中的特征地物的相对导航信息,计算出飞行轨迹与预计下滑轨道的偏差,从而引导飞机着陆。在1 000 m测量区域的实际外场飞行试验中,实测结果与基于机载差分全球卫星导航系统(differential global navigation satellite system,DGNSS)的载体着陆相比,着陆精度相差0.2 m。
2016年,美陆军试研发一种新型“联合精确空投系统”(joint precision airdrop system,JPADS),该系统配备“空中制导装置”,利用惯性设备控制翼伞姿态,光学传感器则用来捕捉地形特征,与卫星图像进行匹配,实现定位。JPADS预计将于7 260 m高空精确降落在半径为32 000 m范围内的指定位置,目前已在3 000 m高空进行试验,效果良好。
视觉手段由于具有自主性强、不受电磁干扰、对相对导航信息更加敏感,且精度随距离减少而增强等优点,在面向目标的应用领域(导弹末端制导、无人驾驶、火星着陆等)中发挥着重要作用;但其受环境和背景光照等因素影响严重,且高采样率在提供充足数据的同时,不可避免地导致了大量图像运算和处理时耗,不能满足飞行载体对实时性的要求。
1.3 小结
显然,面向飞行载体自主着陆过程的一套完备导航体系的建立必须在利用上述单一导航信息的基础上实现飞行载体与环境间的导航信息交互,发挥单一导航系统的优势,探索新的组合导航手段以及新的导航融合方式,从而满足自主着陆过程对导航系统的精确度及可靠性的要求。
2 基于多种导航信息融合的自主着陆
随着导航与通信等技术的不断成熟,飞行载体的着陆平台逐渐从静基转向动基,应用环境逐渐从地面向深空领域发展,单一导航方式显然难以满足自主着陆对精确度、可靠性及实时性的要求,多种导航信息融合技术逐渐成为研究的主要方向。
2.1 基于2种导航手段的自主着陆
2001年,文献[11]设计了基于惯导/视觉组合导航的着陆方法。无人机根据从图像序列获取特征点的延时与概略位置,依据沿着陆轨迹方向角速度最小化的策略[12]建立着陆轨迹模型,实时评估有利着陆位置,从而导航无人机至屋顶等较高地势区域。该方法在着陆过程中,不依靠场景图像信息或航拍飞机,甚至如GPS等其他导航手段进行辅助。
2003年,文献[13]提出面向飞行载体进场、下降和着陆(entry, descent, and landing,EDL)过程的惯性/景象匹配导航算法,将提取得到的视觉特征观测量与惯性观测量进行紧组合,利用扩展卡尔曼滤波实时精确给出着陆器的地表相对位姿和速度,在探空火箭测试飞行实验中,速度误差为0.16 m/s,位置误差为6.4 m。
2008年,文献[14]将GPS组合观测量进行滤波,再将惯导融合或使用阵列天线的方式解决待着陆的飞行载体可能遇到的卫星信号干扰问题,再实时检测并避免电离层风暴、卫星星历错误等异常现象,最终实现精确的飞行载体在海基载体上的自主着陆,该“两步导航方法”可避免极端环境下JPALS完好性受损。
2016年初,德国航空航天中心实现了无人机自主降落在以20.8 m/s行驶的汽车顶部。通过车顶放置的视觉标记,无人机追踪系统利用惯性/视觉组合手段实时跟踪汽车位置并以相同的速度同步飞行,当二者速度一致时,无人机就降落到汽车顶部的网上,最终降落精度为0.5 m,如图1所示。
2016年,文献[15]设计了基于视觉/惯性组合导航的月球精密进近系统。为了解决月球着陆器由太阳能供电,以及月球地形起伏大和光照不均匀等问题,该系统可在月球表面任意飞行,利用局域范围内着陆点提取算法搜索理想的着陆点,为平台进行长时间充电。在半物理仿真试验中,着陆点的平面位置误差在4 m,在3 000 m的高度时,高程误差达到47 m(3 RMS),符合精确着陆的需求,如图2所示。
2.2 基于多源信息融合技术的自主着陆
多源信息融合是将不同时空域上的多传感器信息在一定准则下加以分析,得到被测对象的一致性解释与描述,使系统获得更优越的性能。常用导航信息有卫星、惯性、视觉、雷达及激光测距以及测高仪测高信息。
1991年,文献[16]对GPS/INS组合的导航系统进行仿真,并利用无线电高度表对其辅助,验证了在飞机精密进场着陆过程中系统的可靠性。
2004年,文献[17]提出基于GPS/INS/激光扫描仪/计算机视觉组合的无人机导航和着陆精确引导技术。在GPS被关闭或受干扰情况下,领域惯导引导载体至着陆点附近,再利用红外激光扫描/计算机视觉探测识别着陆点,最后通过视觉导航手段在近距离获取跑道方向,实现无人机全天候精确自主着陆。
2011年,文献[18]提出了面向微小型无人机的卫星/惯性/视觉的组合导航方案,利用视觉测量和GPS测量分别与INS组成子滤波器系统。仿真验证表明在GPS信号失效时,该系统具有一定容错性能。
2013年,文献[19]提出基于卫星/惯性/视觉的固定翼无人机自主着陆系统,使用视觉相机检测着陆跑道的轨迹,并凭借GPS进行定位。该跑道检测算法利用高阶几何模型处理大量图像信息,得到跑道的着陆点和相对该位置的航向角,实现了在不同季节,以及恶劣环境下安全、稳健的自主着陆。
2.3 小结
综上所述,以惯性为主的多源组合引导着陆系统应用广泛。对于惯性/卫星组合着陆系统,可利用可靠的惯导信息实时监测卫星的异常现象,从而快速捕获卫星信号,卫星导航则在可用时提供高精度着陆信息;对于惯性/视觉组合着陆系统,惯性设备自主性强、系统稳定、数据采样率高,而视觉相机在以非接触为特点的航空航天领域,能够充分发挥其在复杂环境下便于人机交互的优势,且随着着陆距离的缩短而精度不断提高。随着多源信息融合技术在导航领域的发展,基于卫星/惯性/视觉信息融合的飞行载体自主着陆成为研究新趋势,卫星在数据可用时,为载体提供高精度的位置信息,当卫星失锁或者受到障碍无遮挡时,利用视觉导航辅助惯性导航进行误差修正。
3 发展趋势
随着军事应用从空域逐渐拓展到深空领域,飞行载体种类不断增多,促使面向自主着陆的导航技术更加完善。
3.1 卫星技术
北斗卫星导航系统(BeiDou navigation satellite system,BDS)是我国拥有自主知识产权的GNSS。我国于2016-06-12成功发射了第23颗北斗导航卫星,在完成入轨、在轨测试后,这颗地球同步轨道(geostationary Earth orbit,GEO)卫星将与其他在轨卫星共同提供服务。至此,BDS共有6颗GEO卫星、8颗中圆地球轨道(medium Earth orbit,MEO)卫星和8颗倾斜地球同步轨道(inclined geo-synchronous orbits,IGSO)卫星,BDS建设将从“保稳”向着“扩展”迈进,从而为系统服务从“局域”向“全球”拓展奠定基础,如表1所示。
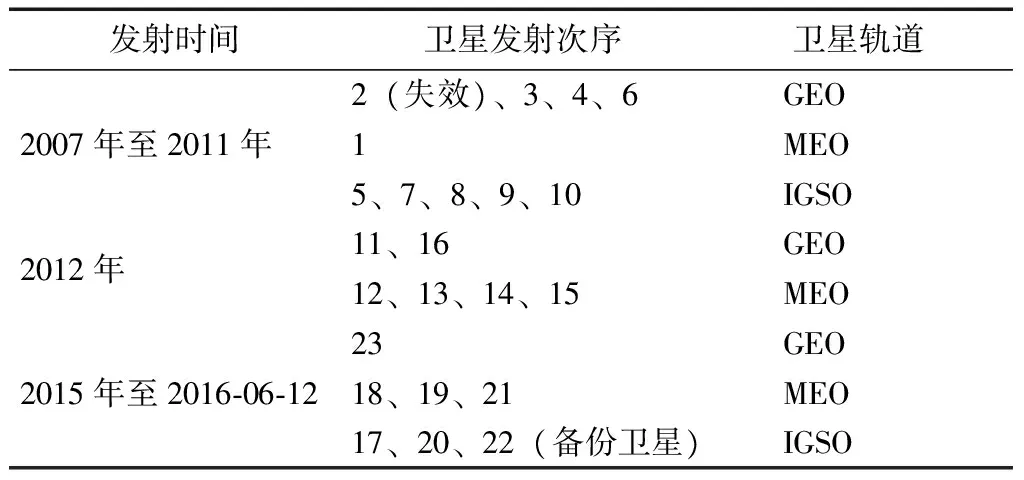
表1 二代BDS发射卫星概况
截至2016-06-12,全世界在轨运行的导航卫星103颗,正式提供导航服务的卫星70颗。在全球卫星服务上,只有美国的GPS、俄罗斯的格洛纳斯系统(global navigation satellite system,GLONASS)和BDS投入全面运行服务,为用户提供定位、导航与授时(position, navigation and timing,PNT)服务,如表2所示。
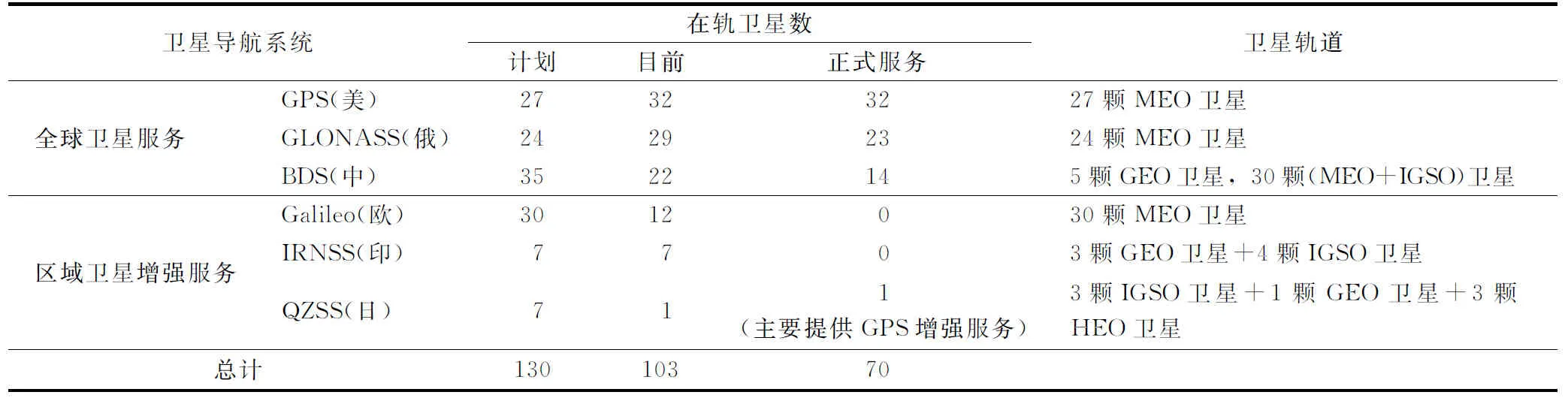
表2 全球卫星导航系统在轨卫星数量(数据统计时间截至2016-06-12)
随着各国导航卫星数量的不断增加,精度已经不再是衡量卫星导航性能的唯一标准。“北斗+”“GPS备份能力”等概念的提出,使完好性和服务性能成为飞行器自主着陆等导航关键领域的迫切需求。卫星信号的频段扩展(S频段等)、卫星星座的合理布设、地面基站的稳定可靠,以及后续用户终端服务(卫星通信、卫星搜救等)的完善将成为关键环节。同时,在电子对抗日益激烈的战场环境中,由于依赖GPS等卫星导航手段而造成的任务失败屡见不鲜,比如2011年,伊朗通过GPS信号欺骗成功引诱RQ-170隐形无人机在敌营着陆;此外,在面向信息化的未来战争中,反卫星导弹、卫星干扰装置的应用不断成熟:显然,卫星导航不能承担无人战机自主着陆等关键任务的重要责任。
3.2 惯性技术
鉴于卫星信号固有的脆弱性,惯性导航受到各国的重视。目前,惯性测量精度已进入发展“瓶颈”,无论是军事武器装备小型化、紧凑化的发展趋势,还是民用智能设备集成化、微型化的迫切需求,长期稳定的高精度,以及设备的低成本与小型化将是惯性技术新的发展方向。微机电、光学、量子力学等领域的技术突破为新型惯性器件的研制注入了新的动力,光子晶体光纤陀螺、微光机电(micro optic electro mechanical system,MOEMS)陀螺、原子陀螺等技术不断取得新进展。美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)已着手研究导航级集成微陀螺(navigation grade integrated micro gyroscopes,NGIMG),并于2010年开展微型导航、定位和授时(micro technology for positioning navigation and timing,Micro-PNT)项目,研究目的均是在减少对GPS依赖的同时,提升系统精确度,增加作用范围,同时减少尺寸、重量和功率,如表3所示。预计2020年,干涉式光纤陀螺仪将达到0.000 1(°)/h的零偏稳定性,与目前静电陀螺的精度相当;而MOMES陀螺精度将达到0.01(°)/h,与目前光纤陀螺的精度相当,这将使微型惯性系统的精度提高2个数量级左右;此外,有报道称基于量子效应的新型惯性系统的理论精度高达10-12(°)/h,且具有长期稳定性,这有望摆脱惯性系统不能作为单一导航系统使用的魔咒。但是现阶段,中国无论是微型惯性技术的研发水平,还是微型惯性器件的制造与批量生产能力均与国外有较大差距。在飞行器自主着陆等对导航精度具有较高要求的应用领域,以惯性为主的组合导航技术仍为研究的重点。
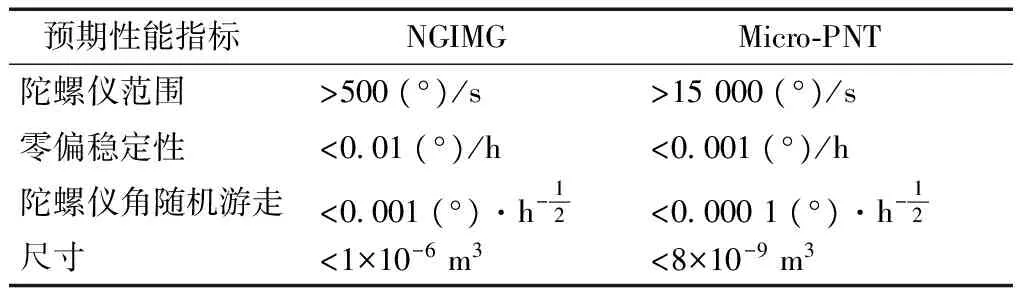
表3 NGIMG和Micro-PNT预期指标
3.3 视觉技术
随着视觉传感器水平和图像处理能力不断进步,视觉技术在自主着陆领域显现出向使用平台更轻盈、传感器表现水平更低,以及导航计算消耗的资源更少的方向发展。传感器方面,美国预计于2022年建成巡天望远镜相机,分辨率高达32亿,而日本将在2016年发布8K相机。算法方面:视觉里程计不依赖于合作目标,对航位进行推算,广泛应用于星际探测器着陆领域;视觉光流法在无GPS信号的室内环境下可实现导航与着陆,在消费级微型无人机领域具有广阔应用前景;同时定位与地图构建(simultaneous localization and mapping,SLAM)在完全未知环境中创建地图,同时进行导航定位,是飞行载体自主着陆领域的新兴技术;此外,基于视觉的增强现实导航系统也逐渐从航空航天领域向地面导航过渡。随着视觉导航技术的发展,在民用领域,新型的地基摄影着陆系统有望成为更稳定、不受电磁干扰的陆基着陆系统;而在军用领域,该系统并不能满足复杂天气条件下的实时、稳健着陆要求,可以作为辅助引导手段。但是,视觉信息获取的途径决定了其受光线以及环境因素影响较大,对视觉标志有一定依赖性,如2015-01,加拿大货船“Atlantic Erie”在海面通视不佳的情况下,仅利用视觉导航将浮标作为主要参照物,并没有采用其他导航设备对船位核实和监控,导致搁浅。因此,在天气复杂的环境下,飞行载体的自主着陆仍需要依赖其他导航手段。
3.4 小结
考虑到飞行器载体自主着陆在导航领域存在的问题与需求,未来的发展趋势主要是在满足飞行载体完好性的基础上保证实时的导航定位性能,具体有以下3方面:
1)在飞行载体着陆系统方面,基于卫星导航的机载着陆系统依靠无线电信号对环境定位,这种方式严重依赖于电磁信号的质量;同时,基于视觉测量的地基着陆系统可从外部对机载导航系统的完好性进行检验,但受天气环境和背景光照等因素影响严重:因此建立机载和地基融合的飞行载体自主着陆系统可以从信息源层面弥补单一着陆系统失效导致的问题。
2)在导航技术方面,随着导航手段飞速发展,导航设备的体积、功耗以及定位性能不断提高,新的组合导航技术逐渐能够满足不同的飞行平台的导航需求:对于民用飞行载体,高容错率的微波/卫星/惯性组合导航系统为客机提供了安全保证;对于商业消费级微型无人机,高实时性的视觉/MEMS/卫星组合导航技术的突破为非专业级的消费者提供了更便捷、操作性强的用户体验;对于军用无人机,高精度的惯导/地形匹配等导航融合技术可实现机降场地的快速开辟,为敌后无人化军事目的的实现提供可能。
3)在导航信息融合方面,现有方法包括:对子导航系统独立输出的导航解进行松组合模式的数据融合,即基于导航解的融合;以及对导航系统的内在信息以及各导航系统之间的相互信息进行紧组合模式的数据融合,即基于观测量及几何关系的融合。但无论是哪种方式,均是利用其他导航系统的误差信息对主导航系统的导航解和系统性能进行优化,而对于外界的环境变化,显然可以利用信息融合的导航方式提取有价值的环境特征信息,可以将这些环境信息作为先验信息参与到导航系统的模型、算法中,使系统更加真实、有效,还可以用于敏感状态辨识和故障的检测与警告。
4 结束语
虽然各项导航技术不断发展并趋于稳定,但目前单一的导航手段难以满足自主着陆的导航需求,而多种导航手段的信息融合、缺点互补,能够达到面向自主着陆的导航载体对精度、可靠性、实时性的要求;显然,以卫星/惯性/视觉融合为主的组合导航技术是发展趋势。因此,建立一整套可以实现导航信息在飞行载体的自主着陆过程中载体和环境间的交互,以及从导航到定位、从误差修正到故障检测等一系列导航处理功能的,完备的导航着陆系统将是进一步的发展趋势。
[1] 陈楸,曹卫涛.基于场景识别的无人机自主着陆组合导航研究[J].计算机仿真,2011,28(2): 84-87.
[2] 唐大全,毕波,王旭尚.自主着陆/着舰技术综述[J].中国惯性技术学报,2010,18(5): 550-555.
[3] 许其凤.空间大地测量学:卫星导航与精密定位[M].北京:解放军出版社,2001:3-10.
[4] 孙红星,唐卫明,陈渠森.GNSS/伪卫星组合定位实现飞机高可靠性高精度进场着陆导航[J].数字通信世界,2011(8): 55-58.
[5] 张京娟,谢淑香,高文,等.伪卫星/惯性飞机自动着陆导引技术[J].中国惯性技术学报,2005,13(5): 20-23.
[6] 刘菁.基于联合精密进近着陆系统(JPALS)技术研究[J].现代导航,2014(1): 75-78.
[7] SARIPALLI S,MONTGOMERY J F,SUKHATME G S.Vision-based autonomous landing of an unmanned aerial vehicle[C]//Institute of Electrical and Electronic Engineers(IEEE).Proceedings of 2002 IEEE International Conference on Robotics and Automation(ICRA 2002).Washington D.C,USA:IEEE,2002: 2799-2804.
[8] 嵇盛育,徐贵力,冯文玲,等.基于红外视觉的无人机自主着舰合作目标的研究[J].红外技术,2007,29(10): 593-597.
[9] 张广军,周富强.基于双圆特征的无人机着陆位置姿态视觉测量方法[J].航空学报,2005,26(3): 341-348.
[10]于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009: 204-211.
[11]VISHNU R,MICHAEL N,HUMENBERGER M,et al.Vision-based landing site evaluation and trajectory generation toward rooftop landing[EB/OL].(2015-06-22)[2016-01-22]. http://www.roboticsproceedings.org/rss10/p44.pdf.
[12]SHEN S,MULGAONKAR Y,MICHAEL N,et al.Vision-based state estimation and trajectory control towards high-speed flight with a quadrotor[EB/OL].(2015-06-22)[2016-01-22]. http://www.roboticsproceedings.org/rss09/p32.pdf.
[13]ANASTASIOS I M,NIKOLAS T,STERGIOS I R,et al,Vision-aided inertial navigation for spacecraft entry, descent, and landing[J].IEEE Transactions on Robotics,2013,25(2): 264-280.
[14]RIFE J,KHANAFSEH S,PULLEN S,et al.Navigation,interference suppression,and fault monitoring in the sea-based joint precision approach and landing system:special antennas and a combination of satellite and inertial guidance data promise to overcome system faults and interference to allow safe landing of aircraft on U.S. navy carriers at sea[J].Proceedings of the IEEE,2008,96(12): 1958-1975.
[15]DELAUNE J,BESNERAIS G L,VOIRIN T,et al.Visual-inertial navigation for pinpoint planetary landing using scale-based landmark matching[J].Robotics and Autonomous Systems,2016,78(C): 63-82.
[16]袁信,刘建业,倪永锡.GPS组合系统在飞机进场着陆中的应用[J].南京航空学院学报,1991,23(4): 1-7.
[17]徐贵力,程月华,沈春林.基于激光扫描和计算机视觉的无人机全天候自主着陆导引技术[J].航空学报,2004,25(5): 499-503.
[18]邵玮,祝小平,赵刚,等.基于视觉/GPS/MEMS-INS数据融合的MUAV导航方案[J].系统仿真技术,2011,7(1): 77-81.
[19]MAXIMILIANL,KONSTANTIN K,MARC S.et al.Vision aided automatic landing system for fixed wing UAV[J].IEEE/RSJ International Conference on Intelligent Robots & Systems,2013,11(3): 2971-2976.
Currentnavigation development and tendency of aircraft autonomous landing
LI Fengyang1,2, JIA Xuedong1, DONG Ming2,3
(1.Institution of Navigation and Aerospace Engineering, Information Engineering University, Zhengzhou 450001, China;2.State Key Laboratory of Geo-information Engineering, Xi’an 710054, China;3.Satellite Navigation Engineering Center, Beijing 100094, China)
In order to further study on the construction of aircraft autonomous landing navigation system, the paper introduced the concept and meaning of aircraft autonomous landing, and reviewed the history of the aircraft autonomous landing about satellite navigation and visual measurement from the aspects of single navigation, then focused on the current development of multi navigation information fusion of aircraft autonomous landing, finally induced the prospect of navigation technology for aircraft autonomous landing. The study result could provide a reference for the application of multi navigation information fusion in autonomous landing system.
autonomous landing; vision navigation; inertial navigation; integrated navigation; multi information fusion
2016-08-29
地理信息工程国家重点实验室重点基金项目(SKLGIE2014-Z-2-1);国家自然科学基金资助项目(41274046);省部级及重要横向科研项目(2015XD01256-613)。
李丰阳(1992—),男,陕西西安人,硕士研究生,研究方向为组合导航、卫星/惯性/视觉导航信息融合。
贾学东(1975—),男,河南南阳人,博士,副教授,研究方向为导航时间与频率系统、导航装备。
李丰阳,贾学东,董明.飞行载体自主着陆导航技术的现状与趋势[J].导航定位学报,2017,5(2):7-13.(LIFengyang,JIAXuedong,DONGMing.Currentnavigationdevelopmentandtendencyofaircraftautonomouslanding[J].JournalofNavigationandPositioning,2017,5(2):7-13.)DOI:10.16547/j.cnki.10-1096.20170202.
P
A
2095-4999(2017)02-0007-07
