压电致动器扑翼结构动力学仿真*
2017-05-14田卫军1张亚锋
田卫军1,,张亚锋,李 郁
(1.西北工业大学机电学院,西安 710072;2.西北工业大学明德学院机电工程系,西安 710124)
扑翼飞行器是一种通过机翼的上下扑动来产生升力和推力的新概念飞行器。图1为美国陆军研究实验所用锆钛酸铅(PZT)材料制成的一角美元硬币大小的机器蝇。空气动力学的研究成果表明[1],对于主尺度小于15cm的微型飞行器,扑翼飞行方式比固定翼和旋翼飞行方式具有更大的升阻比,更强的抗扰动能力和更加灵活的机动性。
常规的扑动机构由于自身原因无法实现高频率扑动而使扑翼的气动效率较低,很大程度上制约了扑翼飞行器的发展。随着压电材料的发展,采用压电致动器的扑翼机构是实现扑翼高频率扑动的一种有效手段。与其他驱动机构相比,压电致动器具有独特的优点:工作频率范围宽、动态范围大、频响速度快、灵敏度高、温度稳定性好(-20~150℃)、质量轻、结构简单,既可以粘贴在结构表面,还可以通过一定的工艺措施耦合到结构之中。特别是牺牲层刻蚀技术的开发,为压电致动器在扑翼飞行器上的应用提供技术背景[2]。
目前,国内对于压电驱动的新型扑动机构研究还处于理论探索阶段。具有代表性的有西北工业大学的张西金等[3]对电磁振动式微型扑翼机构设计和动力学特性进行研究,分析了不同电磁力激励下系统动态响应,并获得了系统的固有频率;西北工业大学的侯宇等[4]根据昆虫扑翼飞行节律运动的原理,设计了一个压电驱动的两自由度扑动机构。南京航空航天大学的王姝歆等[5]对压电双晶片驱动的仿生柔性扑翼机构进行研究,设计出了压电双晶片驱动柔性双摇杆机构放大位移并带动仿生翅拍动的扑翼系统。国外关于压电材料应用于扑翼机翼的研究也处于原理探索阶段,其中最具有代表性的是SRI和Toronto University 合作研制的Mentor概念机[6]。
机翼由一种电致伸缩的聚合物 EPAM(Electrostrictive Polymer Actuated Muscle)驱动。EPAM通过快速改变电压值来实现收缩和伸长,装置尤其适用于快速摇摆运动,如扑翼运动。英国克兰菲尔德大学Chung等进行了应用压电材料的扑翼飞行器仿真研究[7]。Chung从扑动相位、频率等不同角度对机翼扑动进行了仿真研究。韩国Konkuk大学的Nquven等[8]结合仿真和试验研究了带有压电致动器的仿生扑翼产生的气动力以及扑动特性。美国Calif Berkeley大学的Campolo[9]利用压电致动器研制了昆虫量级的微型飞行器。印度Bangalore大学的Sujoy等[10]对采用压电致动器仿蜻蜓扑翼动力学特性进行研究。美国Vanderbilt大学的Cox[11]对采用压电致动器的可悬停扑翼的升力和功率特性进行了研究。本文通过分析压电致动器扑翼驱动原理,结合已有同尺寸扑翼气动力和惯性力试验数据,通过PCL参数化结构仿真,模拟压电致动器扑翼结构动力学特性,为压电致动器扑翼研制提供理论指导。
1 压电致动器扑翼
1.1 驱动原理
采用压电致动器的翅翼(如图2所示)是一种利用压电致动器(PZT)带动翅翼产生主动变形的新概念翅翼结构形式。压电材料通过胶接平行布置于翅翼根部,主要利用压电片在面内的伸缩特性,通过驱动两翼的压电致动器遵循共振原理实现翅翼的高频扑动,改善翅翼的结构特性;同时通过调节输入电压可使两翼扑动幅值不同从而改变翅翼上气动力,如图2所示。这种扑动机构的优点为:(1)通过采用适当频率的电压驱动,利用系统共振可以实现高频扑动(较小的驱动电压实现较大的扑动角);(2)通过改变驱动电压的幅值可以调节扑动角的大小,便于扑翼飞行器控制以及姿态变换;(3)易于向微型化方向发展。

图1 机器蝇Fig.1 Micromechanical flying insect
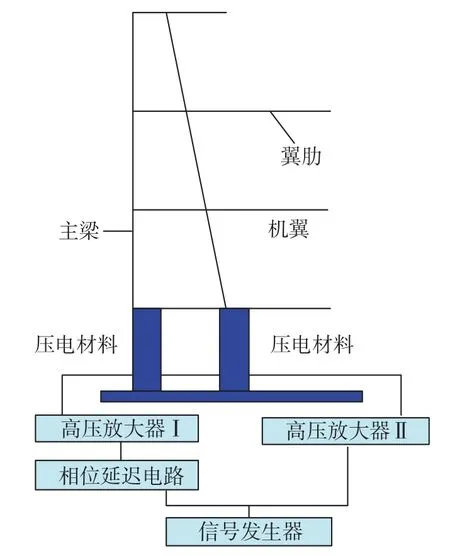
图2 采用压电致动器的翼驱动原理图Fig.2 Principle diagram of piezoelectrically driven wing
1.2 机翼模型
机翼为翼展400mm,弦长100mm的矩形机翼。机翼主要由碳纤维梁和蒙皮构成;机翼骨架由碳杆构成,蒙皮由聚四氟乙烯薄膜构成。压电片(PZT) 粘贴于机翼根部,机翼模型如图3所示,有限元仿真材料属性及尺寸见表1,质量为4g,机翼质心位于半展向0.1m处。

图3 压电扑翼机翼模型Fig.3 Piezoelectrically driven flapping wing

表1 有限元仿真材料属性及尺寸
2 PCL参数化结构仿真
2.1 有限元模型
利用有限元软件Patran中PCL模块对采用压电致动器的机翼进行结构仿真。梁采用beam单元,单元适合于分析从细长到中等粗短的梁结构,该单元基于铁木辛哥梁结构理论,并考虑碳纤维杆剪切变形的影响。翼肋采用Bar单元,薄膜采用shell单元,PZT压电片采用shell单元,机翼外形定义如图4所示,网格划分如图5所示。
2.2 边界条件
机翼仅存在绕x轴旋转的自由度,当体坐标系和x轴上的节点以同机翼相同的角频率在惯性坐标系中旋转时,根弦处于相对静止状态,不存在平移、转动和沉浮运动。将机翼前缘和斜梁根部作固支处理。扑翼机翼最大扑动角为70°,扑动频率7.8Hz。上下扑动对称,在单个上扑角或下扑角中,水平线以上扑动角为45°大于水平线以下扑动角25°;带有被动的弦向扭转变形。
2.3 载荷
机翼上的载荷包括气动力和惯性力。气动力沿机翼展向分解后直接施加于机翼翼肋上。惯性力采用均布载荷的形式也直接施加于机翼翼肋上。

图4 机翼外形及尺寸设置窗口Fig.4 Wing shape and size setting window

图5 网格划分Fig.5 Meshing division
(1)气动力。
扑翼机翼上的作用力包括气动力和惯性力。文中对同尺寸扑翼模型在来流速度为10m/s,扑动频率为7.8Hz,机身中轴线与来流夹角为0°的情况下进行了风洞试验。升力、阻力与瞬时扑动角的对应关系如图6所示。升力沿展向分布,具体展向分布参照文献[12]。
(2)机翼上的惯性力。
当机翼进行周期性扑动时,机翼上随之产生周期性惯性力。惯性力计算公式如下:

式中,mi为机翼第i个微元的质量,ai为第i个质量微元所对应的线加速度。
由于机翼惯性力是阻滞机翼运动的一种假象力,惯性力越大其驱动机翼扑动需要的输入功率就越大,能量消耗越严重。因而在设计时应尽量减小惯性力对机翼变形的影响。机翼的惯性力最大正值为0.689N,最小负值为-0.515N[12]。
2.4 结果与讨论

图6 升力、阻力与瞬时扑动角Fig.6 Lift and drag versus instantaneous flapping phase

图7 一阶模态Fig.7 The first step model
经有限元仿真,模型的一阶模态固有频率为6.74Hz,如图7所示;二阶模态固有频率为19.39Hz,如图8所示;三阶固有频率为25.49 Hz,如图9所示。当作用力的频率与某一固有频率接近时,可能引起结构共振,结构将产生强烈的振动,从而实现高频扑动。通过采用有限元分析方法对机翼结构进行动力学分析,研究了机翼结构与其固有频率和振型的关系,从而为研究机翼的动力学问题和改进设计提供了一定的依据。现已研制出的压电致动器扑翼飞行器扑动频率为12Hz,故而有限元模型模拟的结果比较接近真实情况。

图8 二阶模态Fig.8 The second step model

图9 三阶模态Fig.9 The third step model

图11 压电机翼试验Fig.11 Experiment of piezoelectric wing
3 压电致动器机翼研制
结合仿真结果研制了采用压电致动器扑翼机翼,试验中功率放大器采用双通道供电,试验电压为160V,当扑动频率和机翼共振频率一致时,压电机翼产生的扑动频率为12Hz,压电扑翼机翼翼尖最大变形为±32mm。压电致动器机翼如图10所示,压电致动器扑翼扑动试验如图11所示。
4 结论
通过PCL语言建立采用压电致动器的扑翼有限元模型,结合同尺寸扑翼气动力试验数据,进行压电致动器扑翼结构动力学仿真。研究表明,采用压电致动器后扑翼扑动频率从8Hz明显提高到12Hz,为研究机翼的动力学问题和改进设计提供了一定的依据。随着将来MEMS技术的发展,功率放大器、压电片等部件的质量将大幅度减小,扑动频率将显著增加。根据以往研究结果可知,扑动频率的增加,有助于推力的增加,频率对升力的影响相对较小,因此采用压电致动器后有助于提高扑翼的气动效率。最后结合仿真结果研制出采用压电致动器扑翼原理样机,实现了压电片对机翼弯扭变形的有效控制。
参 考 文 献
[1] 崔尔杰.生物运动仿生力学与智能微型飞行器[J].力学与实践,2004,26(2):1-8.CUI Erjie. Biomimatics of flying animals and intelligent micro air vehicle[J]. Mechanics in Engineering,2004,26(2):1-8.
[2] 宋颖,王志臣,杜彦良.压电传感测试技术的应用研究进展[J].传感器与微系统,2008,27(5): 8-11.SONG Ying, WANG Zhichen, DU Yanliang. Research progress of piezoelectric sensing measurement technology[J]. Transducer and Microsystem Technologies, 2008,27(5): 8-11.
[3] 张西金,方宗德,张明伟.电磁振动式微扑翼机构设计和动力学研究[J].机器人, 2007, l29 (6): 575-580.ZHANG Xijin, FANG Zongde, ZHANG Mingwei. Design of the electromagnetic vibratory mechanism for fmav and the research on its dynamics[J]. Robot, 2007, l29(6): 575-580.
[4] 侯宇,方宗德,孔建益.扑翼节律运动的产生与控制[J].中国机械工程, 2006, l17 (22): 2410-2414.HOU Yu, FANG Zongde, KONG Jianyi. Generation and control of flapping-wing rhythmic movement[J]. China Mechanical Engineering,2006, 117(22): 2410-2414.
[5] 王姝歆,陈国平,周建华.压电双晶片驱动的仿生柔性扑翼机构研究[J].光学精密工程, 2006, 14(4): 617-622.WANG Shuxin, CHEN Guoping, ZHOU Jianhua. Study on insectbased flapping-wing system driven by piezoelectric bimorph[J]. Optics and Precision Engineering, 2006, 14(4): 617-622.
[6] 金晓怡,颜景平,范厚进.电致伸缩器在仿生扑翼飞行器中的应用[J].机械制造与自动化, 2007, l36(1): 39-41.JIN Xiaoyi, YAN Jingping, FAN Houjin. Investigation and application of electrostriction appliance for bionics flapping aircraft[J]. Machine Building & Automation, 2007, 136(1): 39-41.
[7] CHUNG H C,KUMMARI K L,SCROUCHER S J, et al.Coupled piezoelectric fans with two degree of freedom motion for the application of flapping wing micro aerial vehicles[J]. Sensors & Actuators A Physical, 2008, 147(2): 607-612.
[8] NQUVEN Q V, PARK H C, GOO N S. Flapping performance and simulation of an insect-mimicking flapper actuated by a compressed unimorph piezoelectric composite actuator[J/OL]. The International Society for Otics and Photonics. Http://oloi:10.117/12.775733.
[9] CAMPOLO D. Development of piezoelectric bending actuators with embedded piezoelectric sensors for micromechanical flapping mechanisms[J]. IEEE International Conference on Robotics & Automation,2003, 3(3): 3339-3346 .
[10] MUKHERJEE S,GANGULI R. Nonlinear dynamic analysis of dragonfly inspired piezoelectrically driven flapping and pitching wing[C].AIAA. 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Mater Conforence, Colorade, 2011.
[11] COX A G. Analysis of power and lift for a hovering piezoelectrically actuated flapping wing micro-aerial vehicle[D]. Nasville:Vanderbilt University, 2003.
[12] 张亚锋,宋文萍.翼机翼气动力和惯性力对翼杆结构变形研究[J].航空动力学报, 2010, 25(7): 542-545.ZHANG Yafeng, SONG Wenping. Research on wing structure deformation for aerodynamic force and inertial force of flapping-wing[J].Journal of Aerospace Power, 2010, 25(7): 542-545.
