隔膜真空泵传动机构平衡计算及性能仿真
2016-01-16应利伟,张朋奇,杨亚林等
隔膜真空泵传动机构平衡计算及性能仿真
应利伟,张朋奇,杨亚林,陈江义
(郑州大学机械工程学院,河南郑州450001)
摘要:隔膜真空泵是工业中用于控制容器压强和实现真空的关键设备之一。在工作过程中真空泵因传动机构不平衡而导致机器振动和噪声过大,从而降低机器的性能和寿命,因此需要对传动机构进行平衡。将真空泵传动机构简化为曲柄滑块机构,运用质量代换方法,计算出使机构残余惯性力最小时的平衡配重,实现了机构的部分平衡。最后利用ADAMS软件,建立了真空泵的虚拟样机,对样机的不平衡惯性力进行了性能仿真,对平衡效果进行了验证,发现不平衡惯性力显著减小。
关键词:隔膜真空泵传动机构动平衡虚拟样机
中图分类号:TH323文献标识码:A
作者简介:应利伟(1991-),男,浙江桐庐人,郑州大学机械工程学院本科生。
收稿日期:2014-11-30
Balance design and simulation for transmission mechanism of diaphragm pump
YING Liwei, ZHANG Pengqi, YANG Yalin, CHEN Jiangyi
Abstract:Diaphragm vacuum pump is one of the key equipment that is used to control the vessel pressure or to achieve a vacuum. During the running, there is excessive vibration and noise in the machine because of the unbalance of the transmission mechanism, inducing deterioration of the performance and shortening of the service life. Therefore, the balance design of the transmission mechanism is needed. In this paper, the transmission mechanism of the diaphragm vacuum pump is assumed as crank slider mechanism. By the application of quality-substitution method, the optimum balance weight is estimated to minimize the residual inertia force of mechanism. Finally, to test the effect of the balance design, the virtual prototype of the diaphragm vacuum pump is built and based on it the performance simulation of the mechanism is realized. The result shows that the unbalance inertia force of mechanism reduces significantly after the balance weight being added.
Keywords:diaphragm vacuum pump;transmission mechanism;dynamic balance;virtual prototype
0引言
隔膜泵是容积泵中较为特殊的一种形式,它是依靠隔膜片的来回鼓动来改变工作室容积以吸入和排出气体的。在医学和化学上被广泛应用以控制容器压强或实现真空[1]。隔膜泵主要由电机、偏心轮、轴承、连杆、隔膜、泵体、吸入阀和排出阀组成。由于隔膜泵偏心轮转速较高,产生了较高的惯性力,导致设备产生较强烈的振动和噪音,而且引起隔膜泵实现的真空度不高,这就严重限制了隔膜泵的应用。因此,有必要对隔膜泵进行惯性力平衡。本文通过计算优化出了为了达到最小惯性力的配重,并用ADAMS进行机构仿真分析,发现加了所算的配重之后,惯性力显著减小了。对设计隔膜泵和对现有隔膜泵进行平衡以减小振动有着重要意义。
1机构平衡计算
1.1惯性力分析
虽然在隔膜真空泵中连杆与隔膜以螺钉连接,不是纯粹意义上的曲柄滑块机构,但是隔膜属于弹性材料,而且连杆长度远大于偏心轮的偏心距,使隔膜往复运动距离较小,为了求解计算方便,可将隔膜简化为一个的滑块。根据分析,可以获得隔膜泵传动机构的运动简图,如图1所示。其中各构件(曲柄1、连杆2及连杆3)的质量分别为m1、m2和m3。其质心位置分别为S1、S2、S3。曲柄1、连杆2及3的长度分别l1、l2、l3。运用质量代换法将m1分解到运动副A和B处得到分解质量mA1和mB1,其中

图1 隔膜泵传动机构简图
mB1=lm1/l1
(1)
同理可将质量m2和m3分解到运动副B、C和D处可得
(2)
质量代换后在运动副B、C和D处存在三个假想集中质量mB,mC和mD,可分别表示为
(3)
由于原动件作匀速转动,因此运动副B点的加速度为
(4)
其中ω1为曲柄的角速度。对图1机构进行运动分析可将构件5的位移表示为
xC=l1cosφ1+l2cosφ2
(5)
根据正弦定理有

(6)
将式(6)代入(5)可得构件5的加速度

(7)
构件4与构件5的加速度相等,即aD=aC。由此可以计算出运动副B、C上集中质量的惯性力为

(8)
在隔膜真空泵中,由于l1/l2≤1,因此运动副C和D上集中质量的惯性力可简化表达为

(9)
惯性力PB由A指向B,惯性力PC和PD沿水平方向,令PC′=PC+PD,可以获得机构的总惯性力为[2]:
|PS|=[|PB|2+|PC′|2-2|PB||PC′|cos(π-φ1)]1/2
(10)

图2 残余惯性力
如果在机构上加一个平衡配重,则会产生一个平衡惯性力Pe,经过该力平衡后,机构的不平衡惯性力可以得到很大改善,即由PS变为P,该力称为残余惯性力,如图2所示。
很明显,当机器运转一周时,φ1从0到2π,不平衡惯性力PS也呈周期性变化,周期也为2π。
1.2平衡计算
由图2可知,如果不对机构进行平衡,机构的总不平衡惯性力PS比较大,会给运行中的真空泵带来很严重的振动和噪声。为了减小机构中的惯性力,需要添加配重来部分平衡惯性力。如图2所示,针对某一角度φ1,当所加配重产生的惯性力Pe与残余惯性力P正好垂直时平衡效果最好,这时候的P称为最小残余惯性力。此时配重产生的平衡惯性力满足
Pe=PB+PC′cosφ1
(11)
最小残余惯性力P为
P=PC′sinφ1
(12)
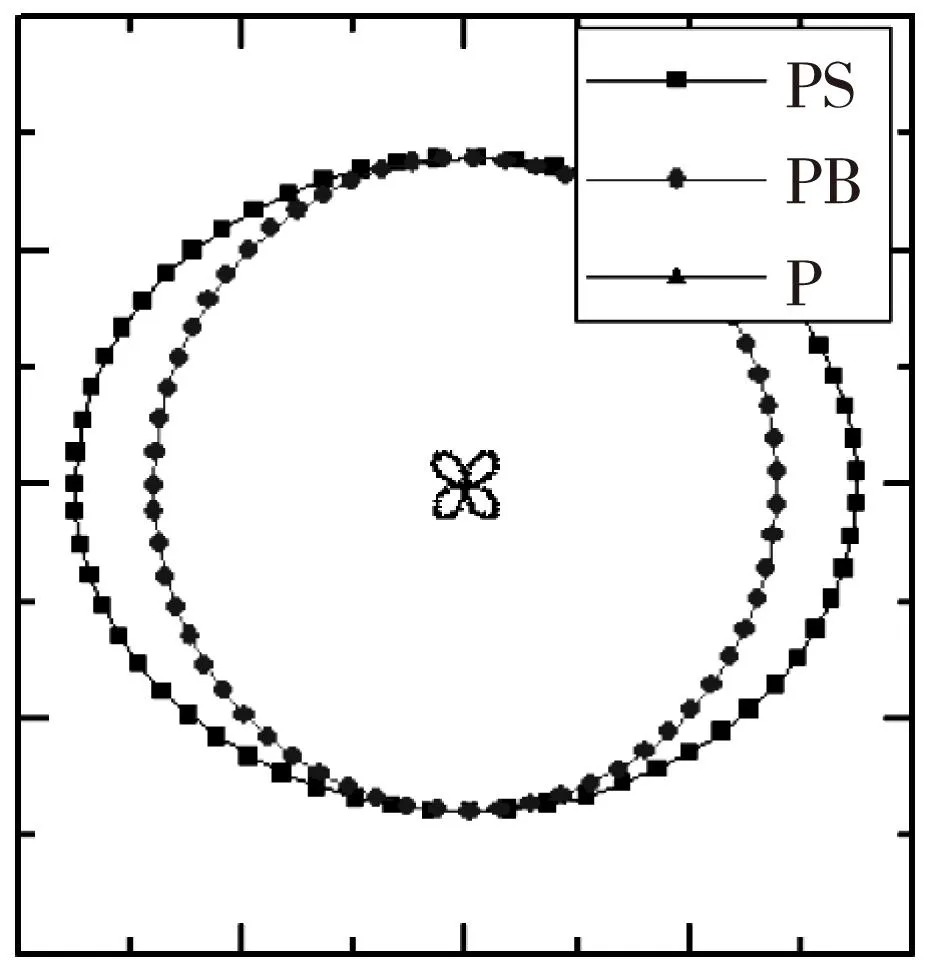
图3 最小残余惯性力
因此当曲柄旋转一周时,运动副B上集中质量的惯性力PB的矢量端点轨迹为一个圆,平衡前机械的总不平衡惯性力PS矢量端点的轨迹为一椭圆,而平衡后残余惯性力P矢量端点的轨迹花瓣形,如图3所示。
如图2,要产生最好的平衡效果,平衡配重产生的惯性力Pe最好随φ1变化,但在工程实际中添加平衡配重时不可能做到这一点。在隔膜真空泵平衡时,为了设计和制造方便,通过在曲柄AB的反向延长线上添加配重来部分平衡惯性力。由于在图1所示中BA方向上加配重,为了计算上的方便,可以将加配重后运动副B上集中质量的不平衡惯性力表示为[3]:
(13)

图4 实际残余惯性力 与理论残余惯性力
其中n为系数。通过优化计算可以求出最优配重[3],即最优系数n,这时可以获得平衡配重的质径积为
mere=mBl1(1+n)
(14)
最后得到实际残余惯性力PS1与理论最小残余惯性力PS的对比如图4。
2性能仿真与分析
为了检验上述理论的正确性,现对某公司生产的一种隔膜真空泵进行平衡计算及性能仿真。该产品型号为MP-201,功率为180W,排气量为20L/min,曲柄转速为1 440r/min,最大真空度为0.098MPa,重量为10kg,外形尺寸为230mm×300mm×150mm。该机器传动机构的运动简图如图1所示,其中各构件的尺寸、质量及质心位置分别为:m1=0.183kg,l1=4mm,l=5.03mm,m2=0.096kg,l2=60mm,b=54.69mm,m3=0.096kg,l3=60mm,c=54.69mm。经过平衡计算可得参数n=-0.1272;平衡质量的质径积mere=0.001 83kg·m。加过配重之后残余惯性力为PS1=4.75N。

图5 传动机构几何模型
为了检验本文所述方法的正确性和有效性,采用虚拟样机软件ADAMS对真空泵的传动机构进行性能仿真。首先建立隔膜真空泵传动机构的三维几何模型,如图5所示。
将建好的几何模型导入到ADAMS系统后,设定相关仿真参数,对该传动机构的惯性力进行分析[6]。分析结果如图6所示,其中(a)图表示平衡前机构的惯性力,(b)图表示平衡后的惯性力。实线竖直方向的分力,虚线为水平方向的分力。根据图2分析,PS由PB和PC′叠加而成。而PB与曲柄的方向相同,并随其旋转而旋转。将PB分解为水平和竖直方向的分力,可得这两个分力幅值大小相同,周期相同,且相位差相差π/2;PC′始终为水平方向,周期和相位与PB竖直方向的分力相同,可得PS的水平和竖直分力相差π/2。通过在AB反方向添加配重已减小PB的幅值从而起到减小总惯性力PS的作用。

图6 不平衡惯性力仿真结果

图7 平衡前后残余惯性力
平衡前后不平衡惯性力的曲线如图7所示。
前述,由图中可以看出加配重后残余惯性力约为20 N,与计算的4.75 N有一定差距,这是因为上面模型的质量代换法用的是静代换,代换前后构件对质心轴的转动惯量不相同。
3总结
本文采用质量代换方法对隔膜真空泵传动机构的动平衡进行了分析和计算,并给出了最佳平衡配重计算方法,最后虚拟样机软件ADAMS对机构的不平衡惯性力进行仿真。理论分析和仿真结果说明了产生振动的主要原因,该工作对这类设备的设计和制造能提供有意义的指导。根据图2可得,该设备产生强烈振动的主要原因是PB很大,对机构总惯性力PS的影响较大。PB很大的原因主要有:构件1、2、3的质心S1、S2、S3都比较靠近运动副B,使mB大于mC、mD。如果质心S1、S2、S3都远离运动副B,则使PB较小、PC增大,使得最小残余惯性力P增大,也使得实际残余惯性力增大,从而会加剧设备的振动和噪声。基于此,为了提高设备的动态性能和改善平衡效果,应使构件1、2、3的质心尽可能靠近运动副B,可在连杆设计时采用轻质材料。
参考文献
[1]唐一科,阴红艳,陈国聪,徐正昭.摩托车曲柄连杆机构动平衡测试与校正的新方法[J].重庆科技学院学报(自然科学版),2013,15(6):112-115
[2]陈峰华.ADAMS2012虚拟样机技术从入门到精通.清华大学出版社,2013
[3]张栋,翟俊萌,高志文.基于ADAMS的直列四缸汽油机曲柄连杆机构动力学仿真及平衡分析[Z].中国内燃机学会燃烧节能净化分会2012年度学术年会,2012
[4]薛定宇,陈阳全.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011
[5]王磊,刘杰,太兴宇,刘树英.虚拟样机技术在隔膜泵设计开发中的应用[J].矿山机械.2011,39(8)
[6]郝亮,黄艳萍,郝刚,管长焦.往复式隔膜泵曲柄滑块机构虚拟样机研究[J].煤矿机械.2011
[7]祁兵,杨晓京,吕鹏翔,何冠璋.基于ADAMS的往复式切割机构惯性力仿真研究[C].国际农业工程大会论文集.2010
[8]黄麟,张春林,韩宝玲.曲柄滑块机构惯性力部分平衡的研究[J]. 机械设计, 2006,23(8): 37-40
[9]张志勇.精通MATLAB—基于6.5版本[M].北京:北京航空航天大学出版社,2003