大视场星敏感器光学系统畸变校正方法
2017-04-25李建华李志峰牛振红刘佳琪
李建华,李志峰,牛振红,赵 茜,刘佳琪,2
(1. 试验物理与计算数学国家重点实验室,北京,100076;2. 北京航天长征飞行器研究所,北京,100076)
大视场星敏感器光学系统畸变校正方法
李建华1,李志峰1,牛振红1,赵 茜1,刘佳琪1,2
(1. 试验物理与计算数学国家重点实验室,北京,100076;2. 北京航天长征飞行器研究所,北京,100076)
针对大视场星敏感器光学系统畸变较大,严重影响角距测量精度的问题,采用多项式拟合算法,对研制的星敏感器进行了畸变校正,校正后的平均角度测量误差小于1″。
星敏感器;畸变校正;多项式拟合
0 引 言
利用星敏感器修正惯性导航系统的漂移累积误差是实现航天器自主姿态测量的首选途径。星敏感器以太空中的恒星作为姿态测量的参考源,通过星图识别,输出其在惯性参考系中的指向,是目前航天器测量精度最高的一种定姿设备[1],在民用和军用领域得到了广泛的应用[2]。
大视场星敏感器是指视场在20°左右的星敏感器[3,4],由于视场较大,单幅星图的星点数较多,星图匹配正确率高,因此得到广泛使用。但同时由于视场较大,光学系统畸变引起的测量误差也很大,难以满足高精度姿态测量的需求,必须进行畸变校正[5~8],才能提高角度测量精度。向矢量。根据星点在上述两个坐标系中方向矢量的对应关系,可以得到载体坐标系在惯性坐标系中的转移矩阵,实现姿态确定。
畸变主要影响星点在载体坐标系下的方向矢量确定精度。理想的星敏感器成像模型为针孔模型,如图1所示。

图1 星敏感器理想成像模型
1 基于多项式拟合的畸变校正原理
1.1 星敏感器理想成像模型
星敏感器定姿的基本步骤为:a)从拍摄获取的星图中提取星点的坐标,根据星点坐标确定星点在星敏感器载体坐标系下的方向矢量;b)利用星图匹配方法识别探测得到的星点,确定星点在惯性坐标系下的方
设星敏感器的载体坐标系为(x, y, z),星光经过光学系统在探测器面上形成弥散斑,通过星点提取算法计算其中心坐标为(un,vn),则恒星单位方位矢量在星敏感器载体坐标系下为

上述模型没有考虑畸变的影响。在工程上,一方面焦距f难以精确测量,往往是经过试验标定获得。另一方面,由于畸变的存在,中心坐标与方向矢量的关系不满足式(1),也需要标定。实际上往往采用两者结合的综合实验法,重建方向矢量与星点坐标的关系。
1.2 多项式拟合的校正原理
从成像面的星像坐标点计算相应星光在星敏感器载体坐标系下的矢量,需要借助一种光学系统映射模型公式,该公式的系数通过标定试验获得。标定试验通过1台高精度二轴转台和1台高精度平行光管来进行参数标定。
二轴转台按照既定规划转动N次,获得N个相对于星敏感器载体坐标系的星光矢量[xn, yn, zn],(n = 1, 2, …, N),同时记录各次转动的成像点亚像素坐标[un, vn],(n = 1, 2, …, N),基于这2组数据进行如式(2)和式(3)所示的 5次多项式的最小二乘拟合,获得 42个标定系数k0~k41。

上述公式可以写成矩阵形式,令:


则式(2)、式(3)可以写成矩阵形式:

利用最小二乘原理,已知矩阵YZ和UV,可以计算得到标定系数矩阵M。

2 畸变测试及校正
2.1 畸变测试原理及过程
测试原理如图2所示。测试设备主要由平行光管、目标分划板、高精度二维电控转台(含控制系统)、星敏感器图像处理系统和畸变计算软件组成。
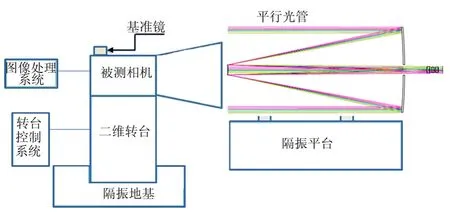
图2 相机系统畸变测试示意
将星敏感器(图 2中的被测相机)安装在转台台面,调整待测产品,使待测产品和平行光管中心基本在同一高度。测试时,在平行光管焦面放置星点板,控制转台水平运动,使星点在CCD靶面成像,记录转台水平转动的一系列标准角度ωi(i=1,2,3,…),同时相对应的待测产品采集图像Pi(i=1,2,3,…),采集过程从相机的左片出现图像开始,到右片图像消失结束。控制转台俯仰在不同角度重复以上水平方向的扫描,最终在待测产品像面进行网格状的全覆盖测试。
对于本次畸变校正试验,使用的二维电控转台方位角定位精度±0.8 ″,方位角重复精度0.2 ″;俯仰角定位精度±1.5 ″,俯仰角重复精度 0.3 ″。平行光管焦距950 mm,远大于被测系统的焦距18 mm,光束的平行性小于3 ″,波像差优于 /15λ (λ=632.8 nm)。转台移动的角度间隔设为0.7°,每行移动21次,单行覆盖14°,全幅面一共扫描 21×21=441各点,覆盖14°×14°视场范围。畸变测试现场如图3所示。

图3 畸变测试现场
部分测试数据结果如表 1所示。方向矢量与方位角α、俯仰角β关系如下:


表1 畸变标定测试数据记录(部分)
2.2 畸变校正结果
根据试验得到的坐标数据与方位数据,可以计算得到校正系数,对畸变进行校正。校正后的畸变量计算有2种方式:a)采用焦距f;b)采用主距 f'。主距采用各个视场角ωi下测得的畸变量 yδ′平方和为最小值的方法计算得到:

式中 yi′为实测像高。视场角ωi与测量的方位角αi、俯仰角βi的关系为

像高yi′的计算公式为


相对畸变定义为

根据式(10)结合试验数据计算得到的主距为 'f为18.902 mm,校正后的441个测试点的绝对畸变最大值为0.0 142 mm,对应的角度测量误差为2.6 ′,相对畸变最大值为0.43%,平均值为0.16%。
本质上采用主距替代焦距利用式(1)进行方向矢量的计算也是一种畸变校正方法。采用主距校正畸变后的理论像点与实际像点位置如图4所示。其中理论像点为利用主距以及转台的角度计算得到的值。
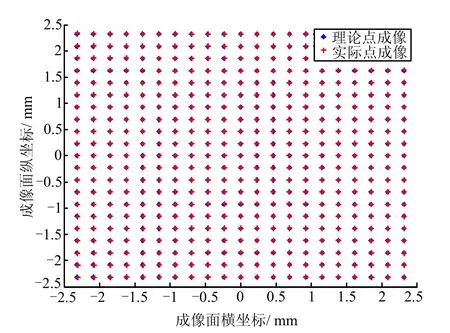
图4 理论像点与实际像点偏差
采用多项式拟合法校正后的最大角度误差为10 ″,平均角度误差为 0.79 ″。可以看到,采用畸变校正系数法校正后的精度相对主点法大大提高。实际角度与多项式拟合校正后的测试角度对比如图5所示。
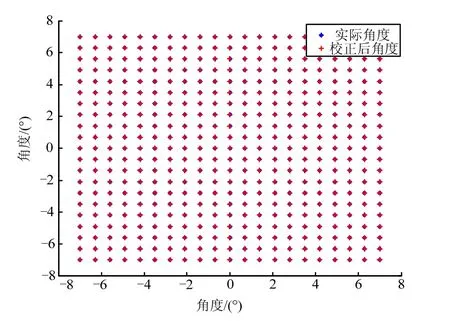
图5 实际角度与多项式拟合校正后的测试角度对比
4 结 论
本文建立了基于多项式拟合的畸变校正模型,对
式中 d为像素的尺寸,取10 µm;u0,v0为光轴与探测面的交点坐标。利用校正公式,令y和z均为零,计算得到u0和v0的值。
对于星敏感器,系统的绝对畸变影响角距的测量误差,绝对畸变定义为实测像高与理论像高之差:研制的星敏感器进行了标定试验,利用测试数据得到了最终的校正系数,利用该校正系数可以完成畸变的校正,提高星敏感器的测量精度。需要说明的是,根据校正公式,可以依据星图的质心坐标,直接解算星点在星敏感器坐标系下的方向矢量,而不需要焦距、像素尺寸信息,因为该校正公式已经把这两个信息融合进去了。该方法与主点校正法相比精度大大提高,付出的代价只是增加了计算量,而且主要是乘法运算,对运算时间影响不大。
[1]梁斌, 朱海龙, 张涛, 等. 星敏感器技术研究现状及发展趋势[J]. 中国光学, 2016, 1(9): 16-29.
[2]刘垒, 张路, 郑辛, 等. 星敏感器技术研究现状及发展趋势[J]. 红外与激光工程, 2007, 36(S): 529-533.
[3]贺鹏举, 梁斌, 张涛, 等. 大视场星敏感器标定技术研究[J]. 光学学报, 2011, 31(10): 1023001-1-1023001-7
[4]丁国鹏, 张涛, 郑伟波, 等. 大视场星敏感器畸变校正技术[J]. 光学技术, 2015, 41(2): 97-100.
[5]佟帅, 李辉, 王安国. 多通道舰载星敏感器标定方法[J]. 光电工程, 2015, 42(2): 21-27
[6]李勉洪, 丁国鹏, 郑伟波.大视场星敏感器标定技术[J]. 传感器与微系统, 2015, 34(7): 40-44.
[7]钟红军, 杨孟飞, 卢欣. 星敏感器标定方法研究[J]. 光学学报, 2010, 30(5): 1343-1348
[8]孙高飞, 张国玉, 郑茹, 等. 星敏感器标定方法的研究现状与发展趋势[J]. 长春理工大学学报(自然科学版), 2010, 33(4): 8-14.
A Distortion Correction Method for Large Field-of-view Star Sensor
Li Jian-hua1, Li Zhi-feng1, Niu Zhen-hong1, Zhao Qian1, Liu Jia-qi1,2
(1. National Key Laboratory of Science and Technology on Test Physics & Numerical Mathematics, Beijing 100076;2. Beijing Institute of Space Long March Vehicle, Beijing,100076)
For wide field of view star sensor,the lens distortion will lead the deterioration in attitude measurement accuracy. A polynomial fitting distortion correction method is proposed to correct this distortion. By using this method, the average angle measure error is less than 1″.
Star sensor; Distortion Correction; Polynomial fitting
TP333
A
1004-7182(2017)01-0103-04
10.7654/j.issn.1004-7182.20170124
2016-04-01;
2016-07-01
李建华(1985-),男,工程师,主要研究方向为光学探测及光电对抗等技术
