一种强散射杂光下的快速星点提取算法
2020-04-28王子寒刘山山程会艳刘梦尧
王子寒, 严 微, 曹 哲, 刘山山, 程会艳, 刘梦尧
0 引 言
利用火工品爆破法[1-3]实现星箭分离时产生大量灰尘颗粒,星敏感器上电后,太阳、地球和月球的杂散光在灰尘颗粒的散射作用下可造成强杂光干扰.此种工况下,由于现有的星敏感器星点像素提取算法采用图像逐行扫描的方式,且软件预设了星点像素数量上限,使得星敏感器在上电初期难以提出有效星点,导致星箭分离后长时间无法实现姿态捕获[4-6].
本文通过对散射杂光的成像原理进行建模和分析,提出在散射杂光等条件下的星点图像与无杂光的星点图像具有近似的能量分布特征,进而提出一种强散射杂光下的快速星点提取算法,通过计算互相关系数,得到杂光星图与星图模板的相关系数分布图,然后利用四邻域差分法和极大值法,提取出局部最大值作为星点窗口的中心,最后利用窗口提星算法提取出有效星点,进而实现姿态捕获.开展了不同杂光工况下的星点提取和姿态识别仿真,验证了本文算法对不同的杂光工况均具有鲁棒性,且姿态捕获速度优于原有算法.
1 散射杂光成像模型
星敏感器的光学系统为望远镜系统,用于对无穷远处的恒星成像,恒星的入射光为平行光,像距等于焦距,即l′=f′,成像在焦面处;颗粒在物空间的有限物距处,其发散的入射光成离焦图像,点成像为圆斑,如图1(a)所示.根据高斯函数可计算颗粒在有限物距出的像斑尺寸.以北京控制工程研究所某型号星敏感器为例,该星敏感器的参数如图1所示.根据高斯公式[7],物距为1m的微粒(点目标)的像斑直径约为232个像素.
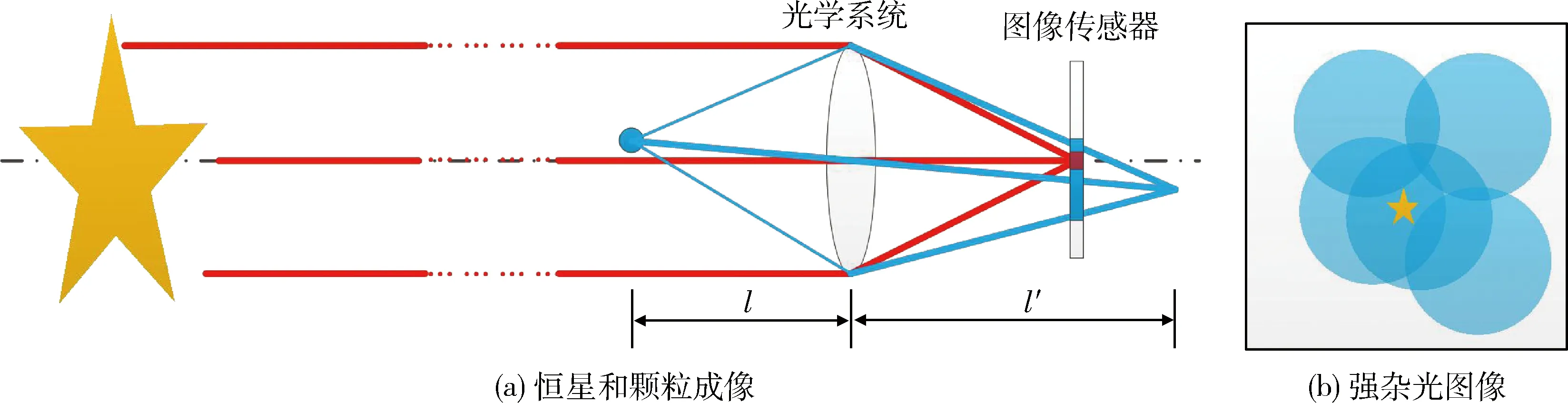
图1 星点和灰尘颗粒成像模型Fig.1 Model of star and dash particle imaging
图2为微粒散射像斑直径(像素数量)与物距(单位:米)的关系曲线.
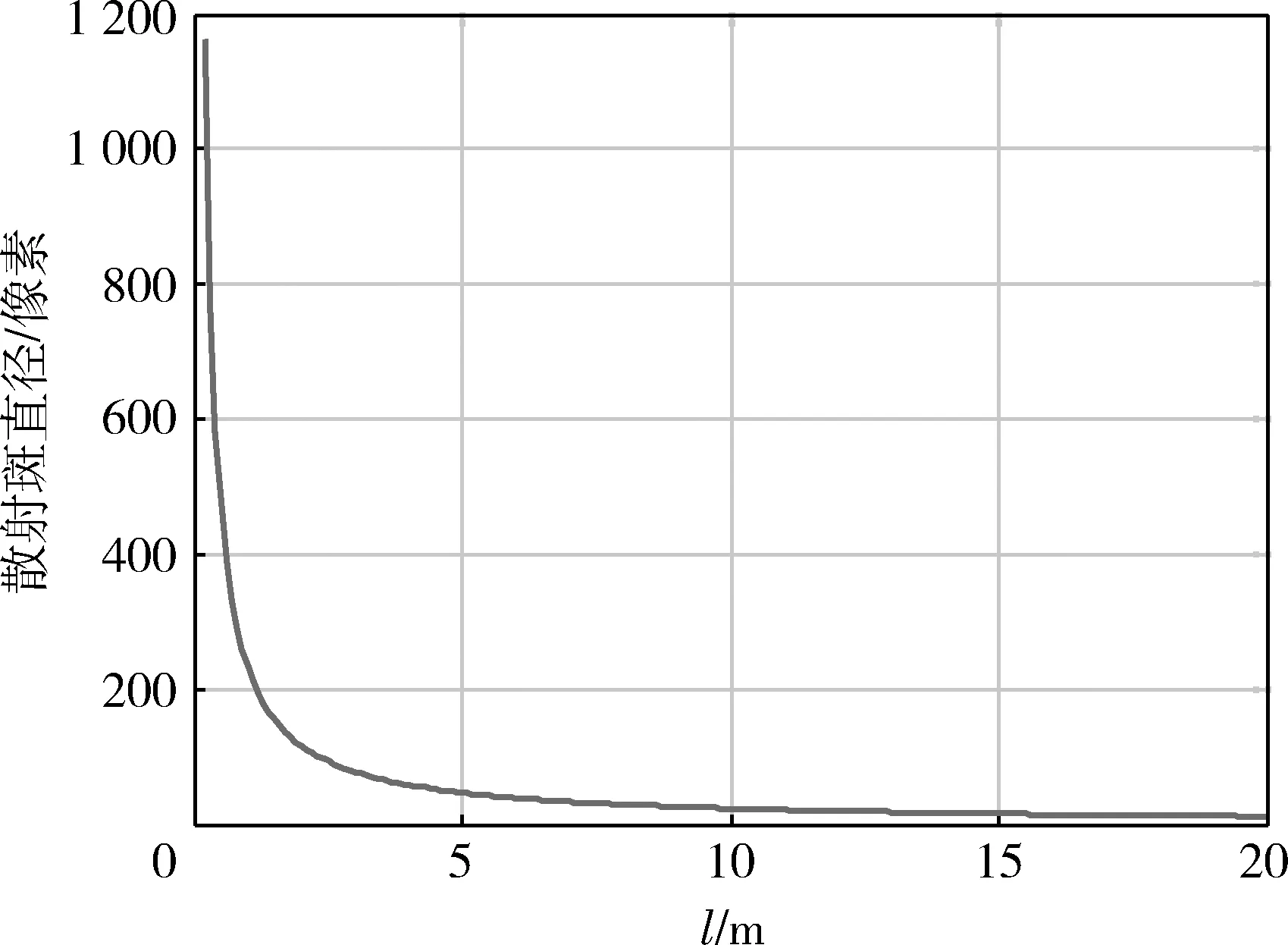
图2 散射斑直径-物距关系曲线Fig.2 Diameter of scattering spots vs object distance
(1)
从物理上,大量细小的颗粒无法阻挡或干扰恒星的全部入射平行光,因此,最终的成像结果为恒星的焦面图像和颗粒的离焦图像的叠加,模型如图1(b)所示.假设图像传感器工作在线性区间,即像素灰度与入射光能量成正比,则在星点的局部区域内,星点图像与强杂光背景的相对光强分布,和无杂光时星点图像与暗背景的相对光强分布均为近似高斯分布,即中心灰度高,边缘灰度低.即使在强杂光条件下,图像传感器已工作在非线性区域,只要像素未达到电子满阱,杂光背景中的星点图像即具有近似的能量分布特征.此外,当星点位于散射光斑的边缘附近,或散射光斑内光强分布不均匀时,星点图像在形态上存在“畸变”,但在多个梯度方向仍能保持中间灰度高、边缘灰度低的特征.
综上,在强散射杂光条件下的星点图像与无杂光的星点图像具有近似的能量分布特征.
2 强散射杂光下的快速星点提取算法
原有算法在强散射杂光工况下识别失败的主要原因在于无法提取有效星点.基于杂光背景下星点图像的能量分布特征,本文提出了一种基于互相关系数[8-9]的星点提取算法.图像的互相关系数是对两个图像相关性的一种度量,可用于图像目标匹配,定义如式(2)所示,其中,w为目标模板,f为待匹配图像.空域的互相关运算等价于频域的复共轭乘积,而快速傅里叶变换有利于互相关运算的快速实现.
f(i,j)=
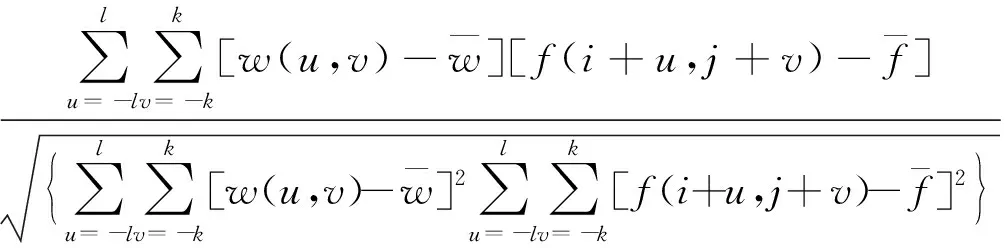
(2)
图5(a)为暗室内通过转台控制太阳模拟器的入射光线与星敏感器光轴夹角,通过鼓动气流的方式激起大量灰尘而采集的强散射杂光图像.此时太阳模拟器的出射光线与星敏感器光轴夹角为60°,大于杂光抑制角35°.杂光图像的像素均值为639,灰度峰值为976.减去暗背景灰度60,并叠加图5(b)的观星图像后,得到图5(c)含强散射杂光的观星图像,用于模拟星箭分离时的在轨工况.
本文提出的散射杂光下的快速星点提取算法流程如图3所示.
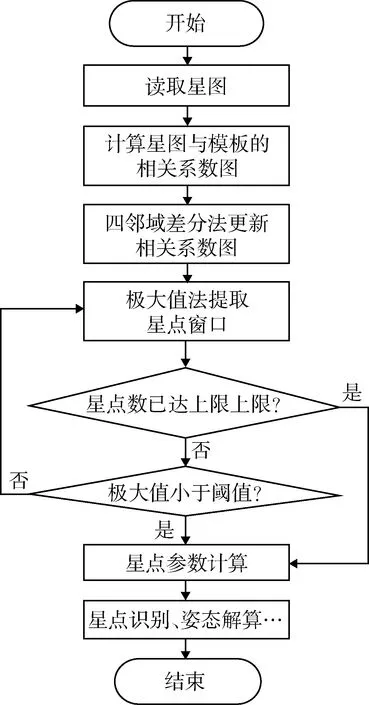
图3 算法流程图Fig.3 Algorithm flow diagram
首先,通过计算互相关系数得到模板和杂光星图的相关性分布图,如图6(a)所示.假设图中波峰位置为星点,而波峰为局部极大值.通过四邻域差分法,首先将图中像素与右方像素做差,并用绝对值更新当前像素值,然后将该像素与下方像素做差,取绝对值更新该像素值,得到最终的相关系数分布图,如图6(b)所示.
然后,循环检索全局最大值提取星点窗口中心坐标,直到提取星数达到阈值上限,或当前全局最大值小于预设的阈值.每提取一组坐标,便将窗口内相关系数置零,以免相同窗口的次大值被再次提取.至此,可提取出星图中所有潜在的星点窗口,如图5(c)中的红色窗口.
最后,利用原有的窗口跟踪模式中的星点提取算法,得到有效的星点和质心坐标,进而利用全天球星点识别、姿态计算和投影验证算法等实现最终的姿态捕获.
星图模板可在星敏感器的外场观星星图中进行截取,应覆盖单个星点的全部有效星点像素.所选星点应为靠近视场中心规则星点,非过暗星或过亮星,以保证模板与不同工况下的目标星点均具有相关性.仿真结果显示,模板的尺寸对星点提取的结果基本无影响.考虑到算法效率,应在覆盖单个星点的全部有效星点像素基础上,尽量选取小尺寸模板.
以图4为本文算法的星图模板,图5(b)中的所有窗口为无杂光星图的星点提取结果,其中红色窗口可与图5(c)中的红色窗口一一对应.此外,图5(b)(c)中右下角的框图为蓝色箭头指向的星点放大图.可以看出,边缘部位已发生畸变的条形星点可以成功提取出来.由此可以看出,本文算法在强散射杂光条件下可提取出有效星点.

图4 星图模板Fig.4 Star image template
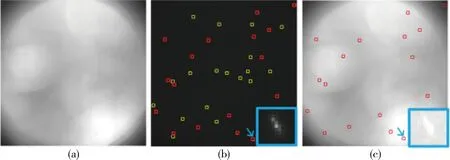
图5 散射杂光和星图Fig.5 Scattering stray light and star images
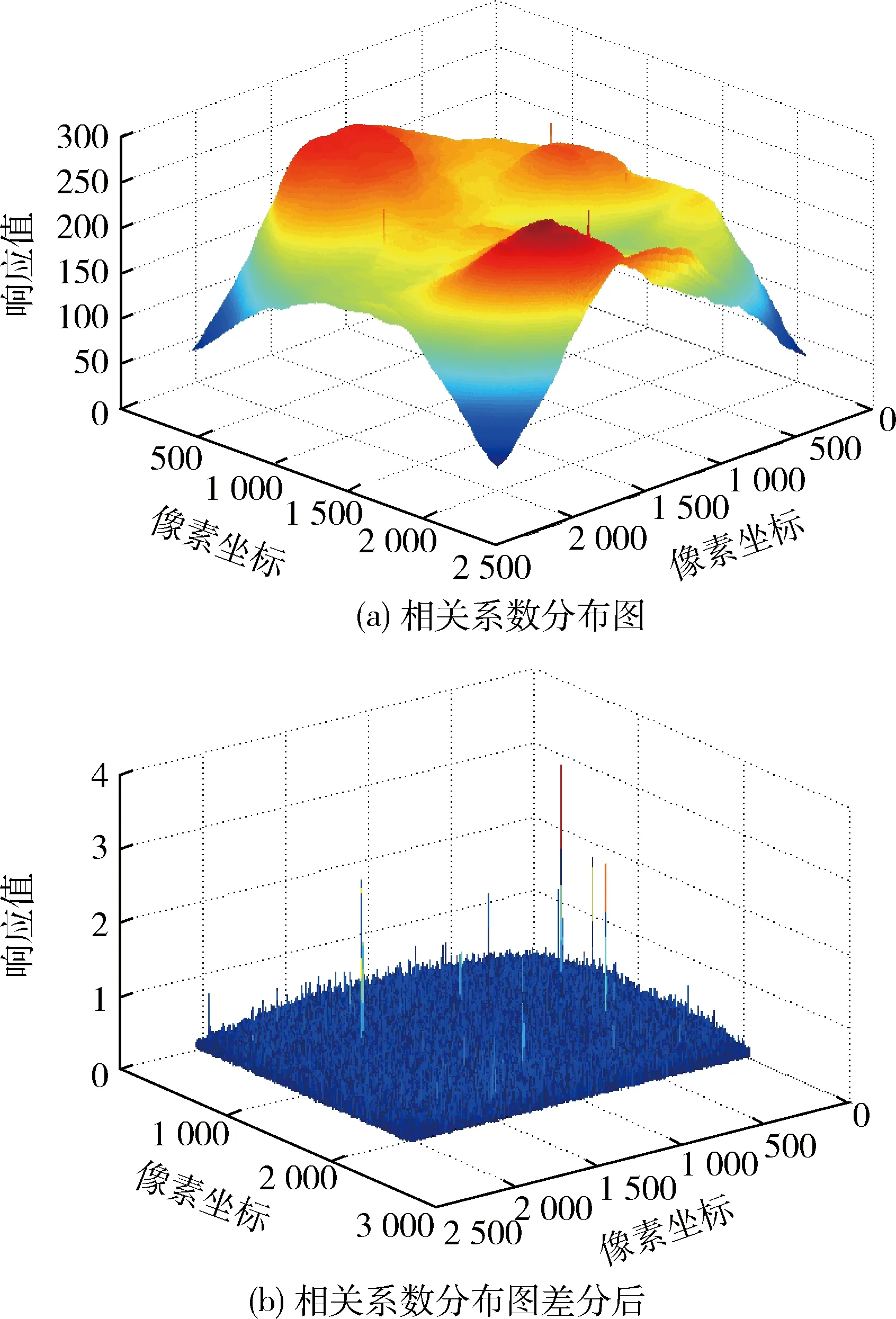
图6 星点提取仿真图像Fig.6 Simulation figures of star extraction
3 星点提取和全天球姿态捕获仿真
本文对所提算法在不同杂光条件下的姿态捕获性能进行了仿真测试.性能指标具体包括提取星数、识别星数等.本文以某型号星敏感器为研究对象进行仿真验证,其参数如表1所示,以图4为本文算法的星图模板.星敏感器的现有算法作为对照组,采用行滤波算法提取星点像素,然后利用聚类算法提取星点.仿真平台为windows XP 32bit系统,MATLAB R2014a.
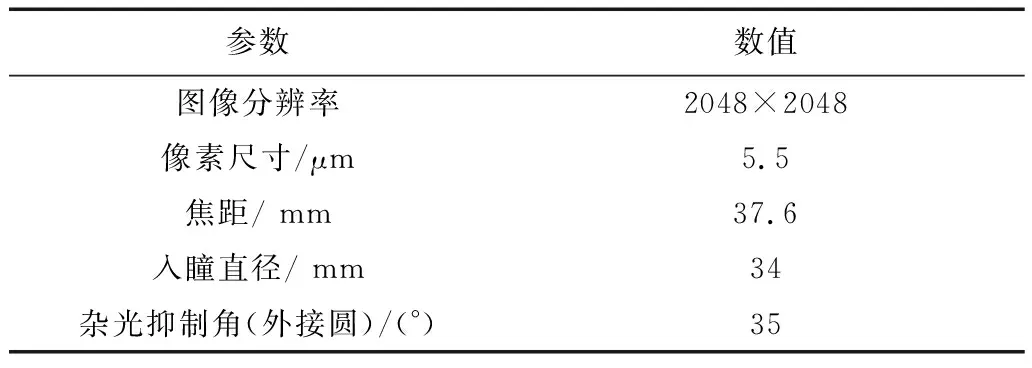
表1 星敏感器参数Tab.1 Parameters of a typical star tracker
3.1 强散射杂光下的星点提取和全天球姿态捕获
利用上文的强散射杂光星图获取方法,以及星敏感器观星采集的星图序列,分别对本文算法和现有算法进行了全天球模式星点提取和姿态捕获的仿真,并以无杂光下的现有算法仿真结果作为基准,仿真结果如图7所示.
图7为提取星数和识别星数.从图中可以看出,本文算法始终能提取出大于11颗的有效星点,识别星数为10颗以上.结合提取和识别星数可以看出,原有算法在强杂散光初期,提取了少量伪星,随着时间推移,提取星数降到0后逐渐增加,并于19帧开始识别星数大于0,姿态捕获成功.
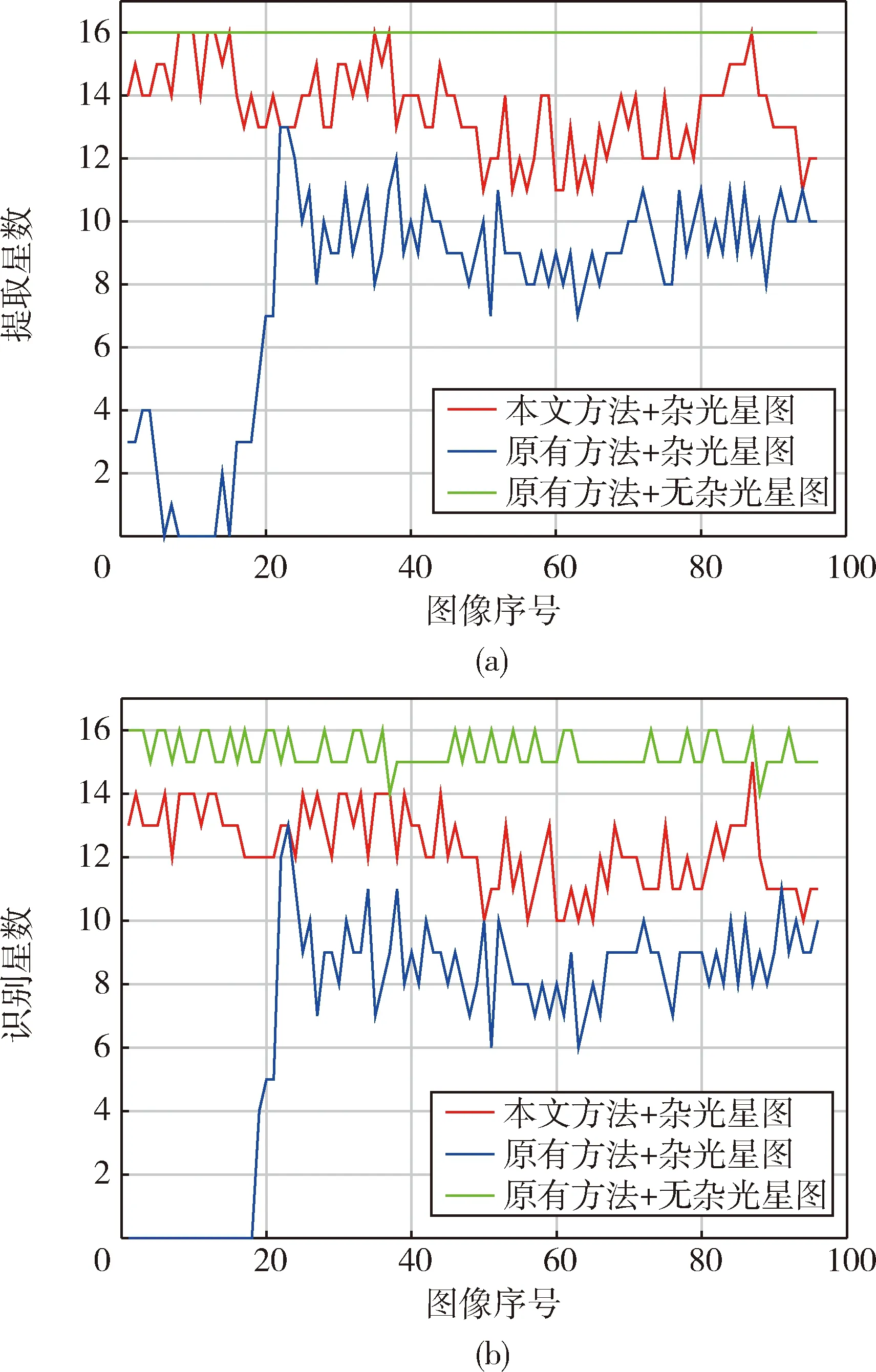
图7 提取星数和识别星数Fig.7 Number of extracted and identified stars
原有算法采用行滤波算法估计像素的背景灰度,并通过叠加可调节的修正参数值作为星点像素和背景像素的判定阈值.星图处理初期,由于修正参数的初始值较小,高亮像素被当做星点像素提取出来,真实星点被伪星点像素淹没,无法提出有效星点.随着修正参数的数值自适应递增,星点像素逐渐从高亮背景中被提取出来,并得到有效星点,最终实现姿态捕获.
综上,与原有算法相比,在强杂散光条件下,本文算法在星点提取和姿态捕获方面具有优势.
3.2 无杂光的星点提取和全天球姿态捕获
开展了无杂光条件下的全天球模式仿真,仿真结果如图8所示.图8(a)中,本文算法和原有算法提取星始终为16,即用于匹配识别的星数上限值.图8(b)中可以看出,本文算法和原有算法的提取和识别星能力基本一致.
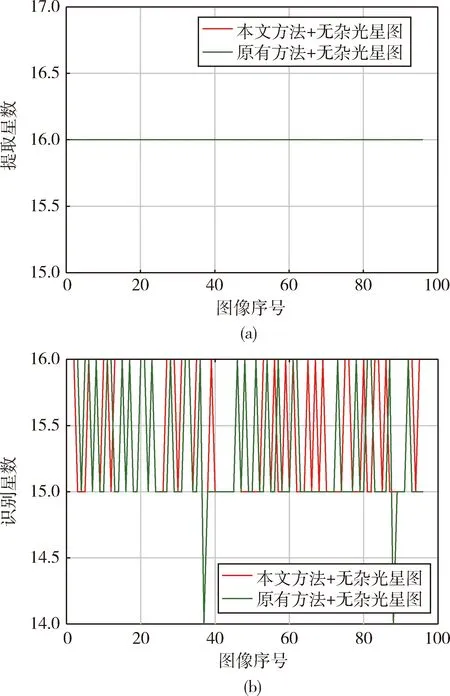
图8 提取星数和识别星数Fig.8 Number of extracted and identified stars
3.3 太阳杂光下的星点提取和全天球姿态捕获
为验证本文算法在常规太阳杂光下的姿态捕获能力,开展了不同杂光入射角时的全天球模式星点提取和姿态捕获仿真.杂光背景图利用星敏感器(35°遮光罩)叠加平面二段遮光罩,通过二维转台控制杂光入射角,参数如表2所示.仿真结果如图9所示.
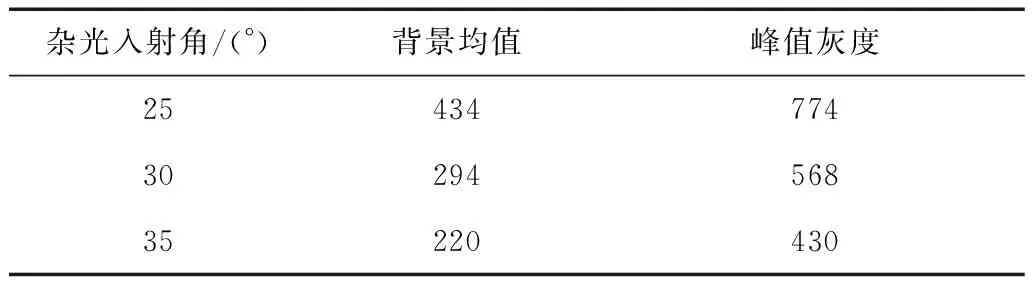
表2 杂光图参数Tab.2 Parameters of stray light images
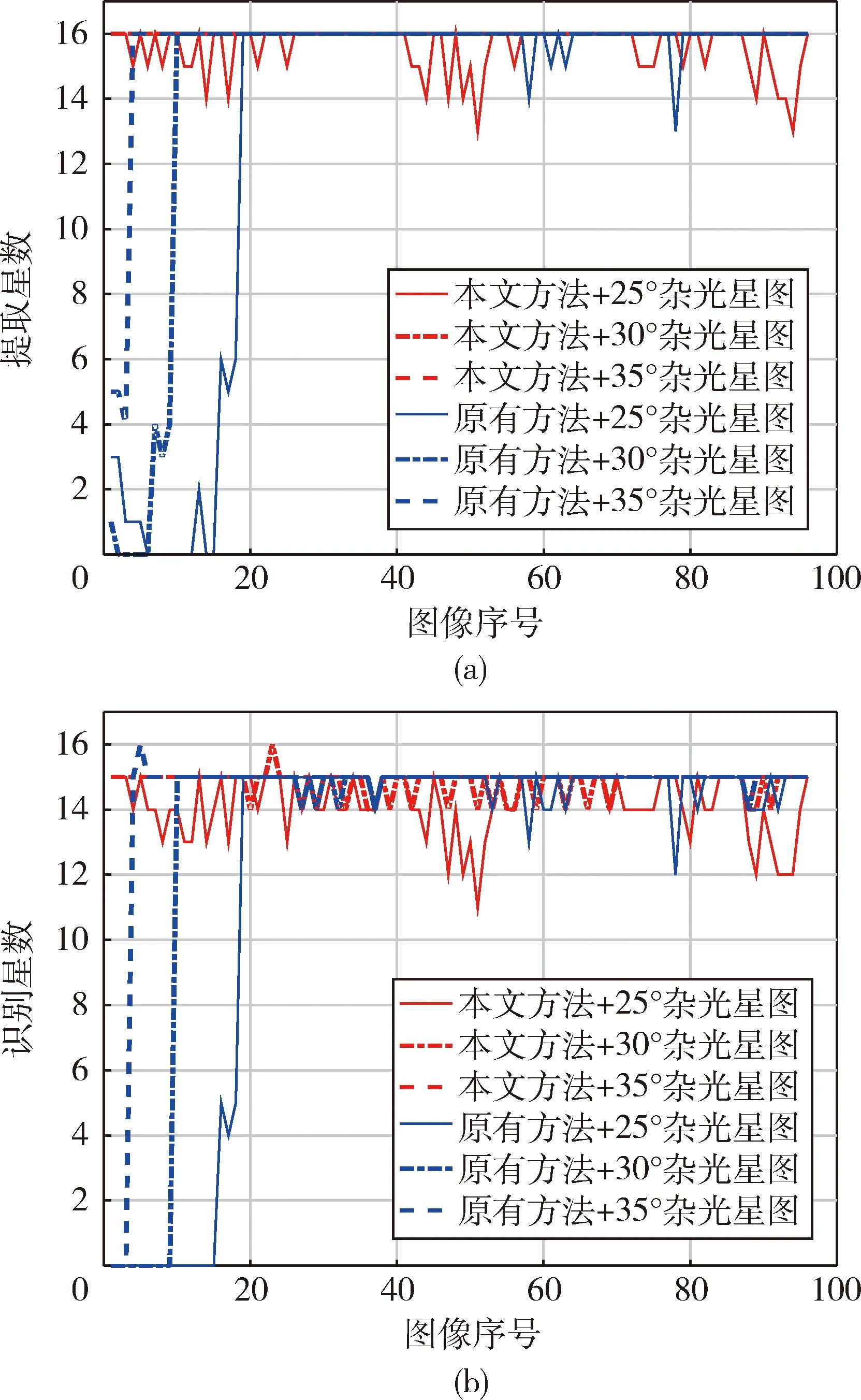
图9 提取星数和识别星数Fig.9 Number of extracted and identified stars
从仿真结果可以看出,随着杂光入射角变化,本文算法的提取星数和识别星数随着杂光入射角减小而略有抖动,但所有图像均识别成功.原有算法的提取星数和识别星数的曲线规律与强散射杂光条件下的曲线规律近似.姿态捕获的时刻如图9所示.随着杂光入射角减小,原有算法的姿态捕获所需处理的星图帧数逐渐减少.
综上,当常规杂光入射角较小时,相对于原有算法,本文算法可更快实现全天模式下的姿态捕获.
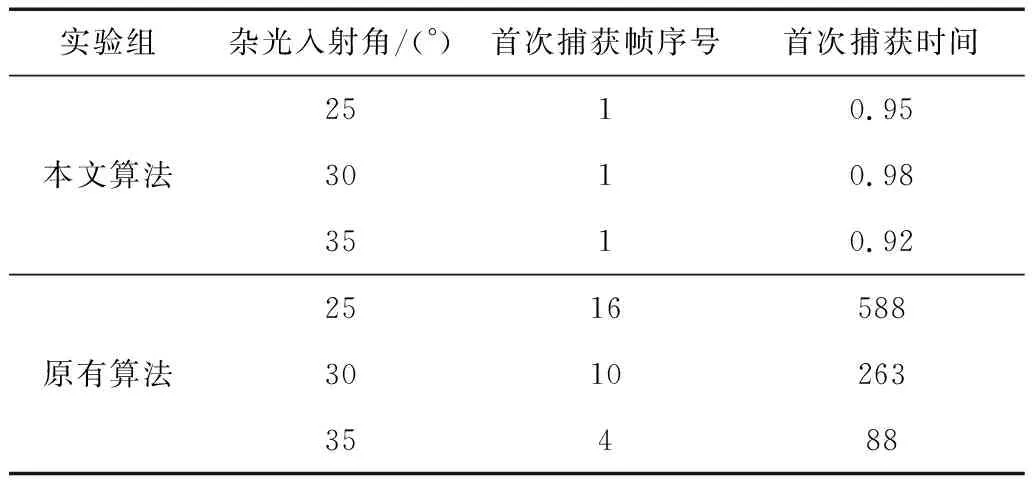
表3 姿态捕获时刻Tab.3 Time of attitude capture
4 结 论
本文针对星箭分离时,由于灰尘颗粒等引起强散射杂光干扰,导致星敏感器长时间无法实现姿态捕获的问题,建立了一种散射杂光条件下的星点成像模型,针对成像模型的星点特征,提出了一种强杂散光条件下的星点提取算法.阐述了算法的实现方法,并针对强散射杂光、太阳入射杂光以及无杂光条件下的不同工况进行了星点提取和姿态捕获仿真,验证了本文算法在不同杂光工况下的星点提取识别能力以及姿态捕获能力均优于原有算法.
