齿隙系统的建模与自振荡分析
2017-03-29王毅何朕孟范伟
王毅, 何朕, 孟范伟
(1.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001;2.东北大学秦皇岛分校 控制工程学院,河北 秦皇岛 066004)
齿隙系统的建模与自振荡分析
王毅1, 何朕1, 孟范伟2
(1.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001;2.东北大学秦皇岛分校 控制工程学院,河北 秦皇岛 066004)
针对齿隙系统都有自振荡倾向的问题,给出了自振荡的条件。分析并说明了当齿隙处于系统中不同的位置上时要用不同的非线性特性来描述。当有力矩传递时齿隙的模型应该是用死区特性来描述,死区特性夹在两个动态环节之间形成了所谓的三明治系统。如果齿隙位于系统的输出端,则齿隙就具有滞环特性。无论是死区特性或滞环特性的场合,系统都有可能出现自振荡。分析指出这种三明治系统是由多重反馈回路所构成的,因而存在着固有的稳定性问题。采用描述函数法分析了这种三明治系统产生自振荡的条件,结论是齿隙的这种三明治系统与带滞环特性的系统一样,也是很容易起振的,并给出了改善起振条件的可能措施。
齿隙; 三明治系统; 滞环; 自振荡; 描述函数
0 引 言
一般常将齿隙特性等同于滞环特性。这是因为早期的小功率伺服系统中齿隙的影响主要是在系统的输出端。当齿轮之间有力矩传递时齿隙就具有死区特性。由于这齿隙死区是夹在两个动态环节之间的,故也称为三明治系统。这种三明治系统多见于当今的大型设备,例如火炮和炮塔的控制[1],大型天线[2-3],装载有光学观测设备的转台[4]等。由于三明治系统的动态关系较为复杂,所以常有文献来讨论这类系统的设计、估计和补偿问题[1,5],但是却很少有文献来讨论这类系统可能存在的自振荡问题。其实带齿隙的系统本身就有一种起振的倾向,不过过去往往采取一种默认的态度,例如当火炮指向的自振荡幅值不超过1 mrad时一般就认为是合格的产品。自振荡是一种不稳定现象,只有当系统是稳定的,或自振荡的幅值进入精度允许的范围内时,这个系统才具有所设计的性能。因此当系统的性能和精度要求越来越高时就需要很好的来处理齿隙所引起的自振荡现象。本文第1节说明齿隙三明治系统的数学模型,第2节分析齿隙自振荡和影响自振荡产生的一些因素,第3节是结论。
1 齿隙系统的模型
机械传动中的空隙(空回程,backlash)一般也统称为间隙。如果是齿轮传动,那就称齿隙。本文主要讨论齿隙的特性。当把间隙看做是一个无惯性、无摩擦的独立的环节时,其输入θ1和输出θ2之间就具有如图1所示的滞环特性。早期的控制理论文献中常将齿隙描绘成具有图1所示的滞环特性是因为齿隙主要出现在系统的输出端(图2),例如早期的小功率伺服系统中是用减速齿轮来带动自整角机(或旋转变压器)的。早年的一些机械式传感器也常具有滞环特性。由于在这些装置中所带动的负载并不大,所以齿隙可用图1的滞环特性来描述。近年来由于科学技术的发展,越来越多的装置开始采用自动控制技术,一些减速齿轮实际上也同时在传递力矩,例如无线电望远镜的大尺寸天线的传动,火炮炮塔的控制,机械手的控制等。这类系统中,主动齿轮和从动齿轮啮合后,带动负载转动时是需要力矩的。当运动反向时,跨过齿间间隙后又需要反向力矩来带动负载。所以这类系统的齿隙特性应该用图3的死区特性来描述。图中纵坐标τ是电机传给负载的力矩,横坐标是电机转角θ1与负载转角θ2之差,是输入输出之差,这是与一般死区特性的不同之处。特性的斜率代表了齿轮啮合后的刚度K。图3的齿隙特性可用方程式描述为
τ=Kδ,δ=DZ(θ1-θ2)。
(1)
式中DZ代表死区特性,有
这里为了突出对主要问题的分析,式(1)的τ只与刚度有关,忽略了与速度有关的阻尼项[1,6-7]。

图1 齿隙的滞环特性Fig.1 Hysteresis of the backlash

图2 输出端齿隙的系统Fig.2 System with output backlash

图3 齿隙的死区特性Fig.3 Dead zone characteristics of the backlash
式(1)的齿隙特性不是一个独立的环节,它与前面的驱动电机和后面的负载是相互耦合的。设电机的控制输入u是力矩,则驱动级的电机方程式为
(2)
式中J1为转动惯量。设齿隙后面的负载方程式为
(3)
式中:J2为负载的转动惯量;d2为阻尼系数。
这里J1、J2,以及相应的力矩、转角等都已是根据减速比n折算到系统输出端(θ2)的数据。图4所示为与式(1)~式(3)所对应的框图 。这框图所对应的系统是构成本文所讨论的齿隙系统的最小系统,也是本文所要讨论的带有齿隙的系统中的控制对象。
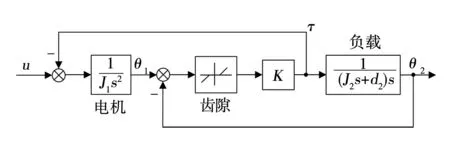
图4 齿隙三明治系统框图Fig.4 Block diagram of sandwiched backlash
注意到这里的齿隙(死区特性)是介于两个动态环节之间的,所以有文献将这类系统称为三明治系统。要注意的是,这三明治系统的前后两个动态环节之间是存在着动态联系的(见图4)。国内有些研究三明治系统的文献把三明治系统简单地看做是中间夹有一个非线性的串联系统,前后两个动态环节除串联之外,相互之间不再有动态联系。这种简单的串联的三明治系统的数学模型只是一种名词上的套用,脱离了实际的应用背景。事实上齿隙三明治系统的前后两个环节相互之间是有动态联系的,更确切说,这个三明治系统的模型本身是一种反馈结构。既然是有反馈存在,就有一个稳定性问题。再进一步,图4所表示的还只是一个控制对象 ,应用中还要加上负反馈控制器。所以一个实际的齿隙三明治系统的模型是内含齿隙死区的,由多重反馈回路包围的复杂的非线性动力学系统。因此对三明治系统来说,首先应该是稳定性问题,而这个稳定性主要反映在自持振荡上。齿隙三明治系统的自振荡问题目前尚鲜有报道,但是工程问题中这类齿隙自振荡是实实在在存在的[4]。本文主要是分析齿隙三明治系统的稳定性和自振荡,为齿隙三明治系统进一步的性能设计提供保障。
2 齿隙系统的自振荡
设齿隙位于系统的输出端(见图2的框图),这时齿隙的特性是一种滞环特性。滞环特性容易引起系统的自振荡。本节用一典型的自振荡为例来进行分析,作为下面对三明治系统分析时的对比依据。
设控制对象为一电机,控制输入u是力矩,电机的转角为θ1,则其方程式为
式中J1为转动惯量。对应的传递函数为
设采用PD控制,则图2系统中线性部分的传递函数为
(4)
本例中设J1=1,KP=10,τ=0.37。本例中滞环的宽度为2Δ(图1),Δ=0.1,特性曲线的斜率为1。图5所示就是此线性部分G(jω)的Nyquist图。

图5 滞环系统分析Fig.5 Analysis of the system with hysteresis
图5中的-1/N则是此滞环特性的描述函数的负倒特性,-1/N上所标的点为A/Δ,A为滞环非线性环节的输入信号θ1的幅值。
从图5中两曲线的走向可以判断,两曲线的交点对应为稳定的自振荡[8],自振荡的频率可读得为ω=2.44 rad/s。从交点处的-1/N上可读得A/Δ=1.57,即角度θ1的幅值为0.157。注意到对于所分析的系统来说,系统为Ⅱ型[见式(4)],其频率特性G(jω)是在第三象限从左到右的走向,而滞环特性的负倒特性-1/N的走向是第三象限自下而上。不论具体参数如何,二者必然相交。对大多数系统来说,其线性部分的特性G(jω),在-1点附近都有如图5所示的G(jω)形状。由此可见,对大多数系统而言,只要存在滞环特性,一定会出现自振荡。
图6所示就是在这组参数下,这个滞环系统(图2)在初始条件θ1(0)=0.3下的仿真曲线。从图可见,系统很快进入自振荡状态,从图上可读得自振荡的幅值θ1max=0.146,自振荡的频率ω=2π/2.9=2.17 rad/s,与上面描述函数法所得的数据基本上是吻合的,描述函数法的分析是可信的。

图6 滞环系统的输出响应Fig.6 Output response of the system with hysteresis
现在来考察齿隙三明治系统是否也有起振的倾向。图7所示是齿隙三明治系统的框图,图中虚线以上部分就是带齿隙的控制对象(参见图4)。这里仍采用上面滞环系统中同样的PD控制律,KP=10,τ=0.37。为了对比,仍取J1=1。设刚度K=1 000,取不同的J2值进行仿真。3种情况下的参数见表1。
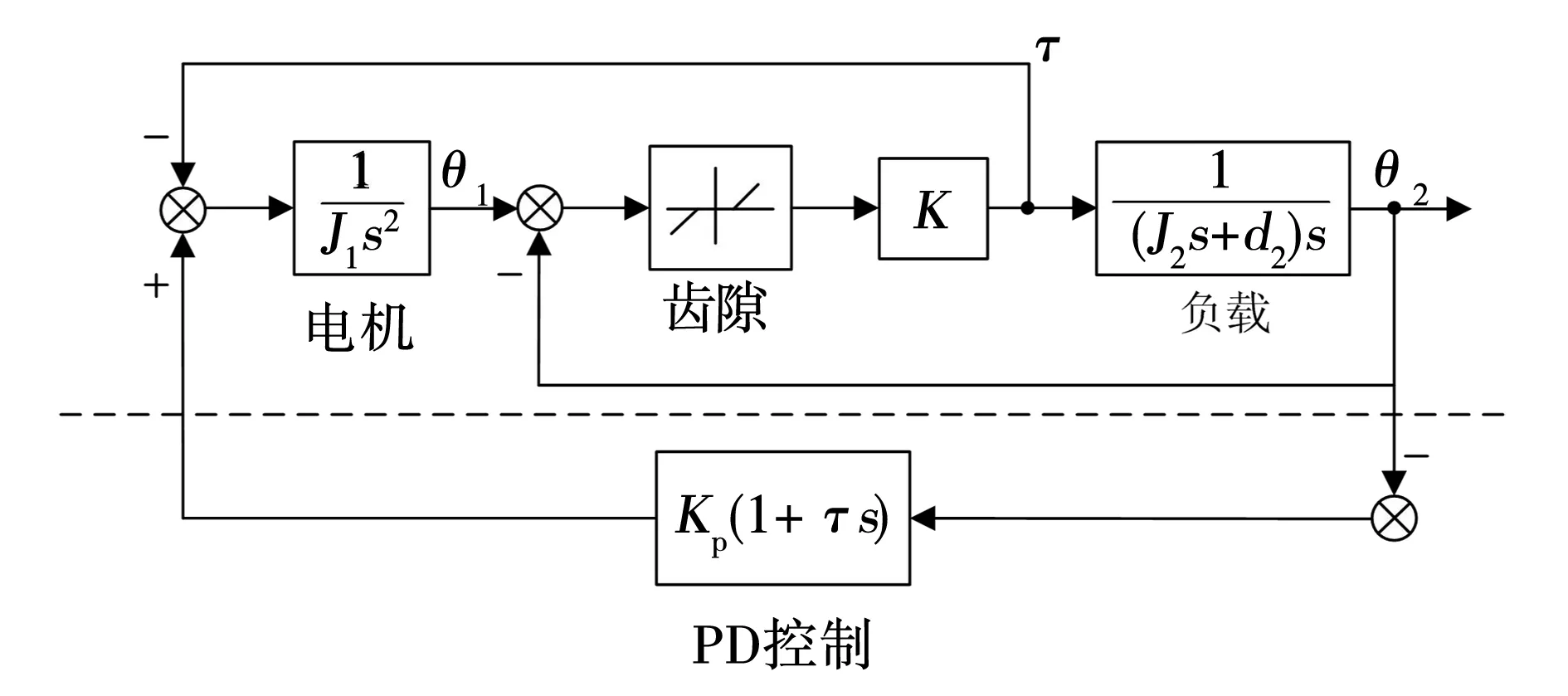
图7 齿隙三明治系统Fig.7 System with sandwiched backlash

表1 仿真时的参数Table 1 Parameters of the simulation
图8所示就是系统在初始条件θ2(0)=0.2下不同参数时的时域响应曲线。图8(a)的J2=0.01,系统特性以J1为主,所以与输出端滞环系统的自振荡响应曲线(图6)相似。J2增大时的响应曲线虽然与图6的滞环系统不同,但图8(b)、图8(c)表明,系统仍可能起振。

图8 三明治系统的时域响应Fig.8 Time-domain responses of the sandwich system
齿隙三明治系统的参数虽然较多,但是从下面的理论分析中可以看到出现自振荡的可能性还是比较大的。现在以表1的第2组数据(J2=0.1)为例来进行说明。根据图7,围绕着死区特性共有3个回路,即有3个并联的回路与它相连。因此在描述函数法中,系统的线性部分特性为
(5)
与线性部分G(jω)相连的死区特性的描述函数为[8]
(6)
图9为相应的N(A)曲线。

图9 死区特性的描述函数Fig.9 Describing function for a dead zone
图10是用描述函数法分析时G(jω)与负倒特性-1/N的图线。-1/N特性位于复数平面的负实轴上,是-1点左侧的整个轴线,当输入的正弦幅值A增大时-1/N点就向右移动,直到-1点。本例中(J2=0.1),频率特性G(jω)与负实轴上的-1/N线相交于-296,即N=0.003 38。这对应于图9上的Δ/A=0.98,故A=1.02。交点处所对应的频率从G(jω)上读得为ω=4 rad/s。
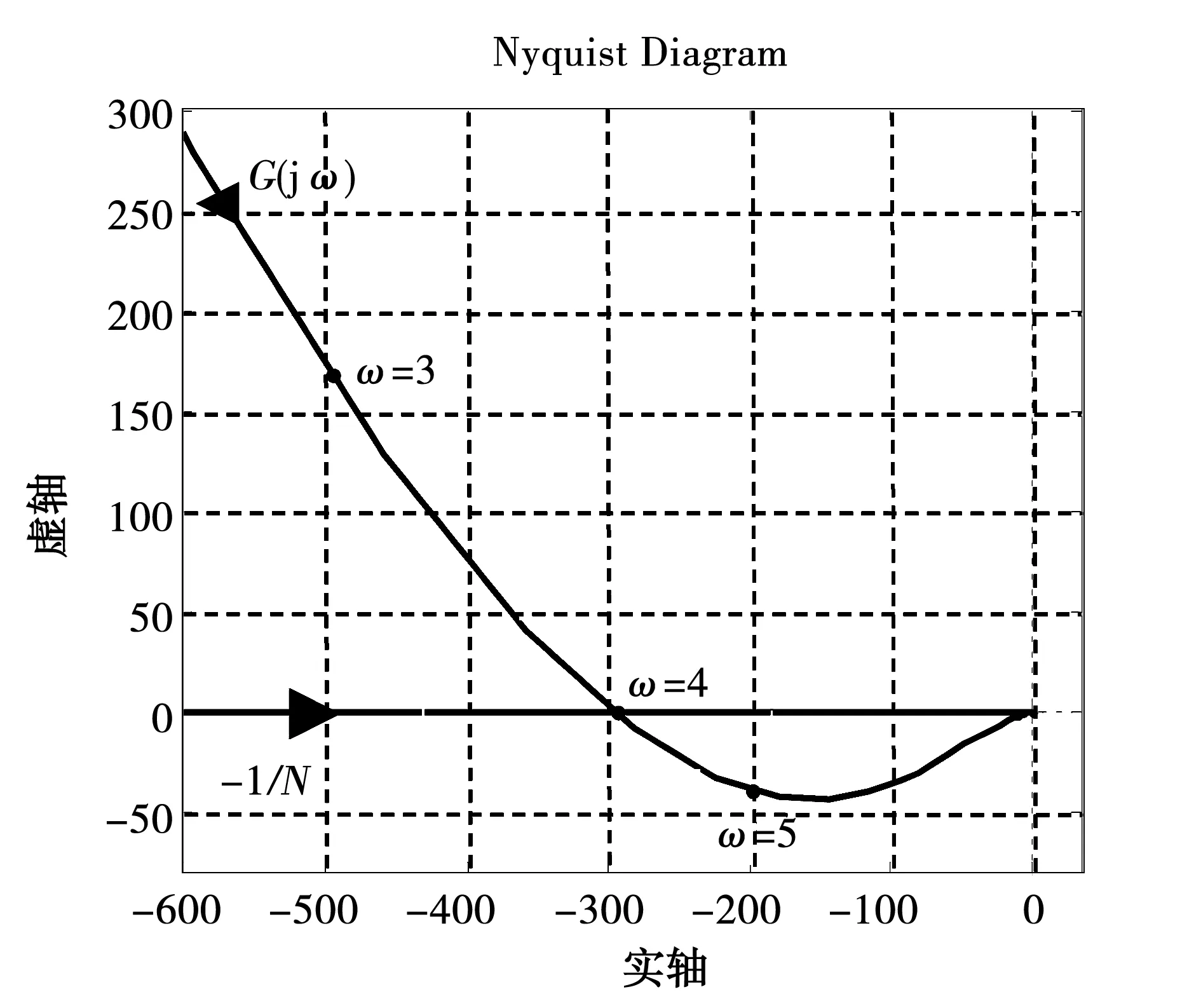
图10 齿隙三明治系统的分析Fig.10 Analysis of the system with sandwiched backlash
为了进行验证,图11所示为对应图8(b)系统的死区的输入信号(θ1-θ2)的波形,从图上可读得(θ1-θ2)的尖峰值为0.103 2,周期T=2.7 s,即ω=2.33 rad/s。从图11可以看到,死区特性的输入信号(θ1-θ2)的峰值只是略微超出Δ,所以死区的输出只是离散的几个很小的尖脉冲,与正弦信号的假设相距甚远,故描述函数法有一定误差,但是基本上是正确的。图11与图10的分析结果基本上是吻合的。
从图10的分析可以看出,只要系统线性部分的特性G(jω)会从第三象限跨入到第二象限,就会与负实轴上的-1/N相交而形成自振荡。而这个G(jω)是由多个反馈回路所形成的[参见式(5)],很可能会穿越负实轴。由此可见,齿隙三明治系统也是很可能起振的。当然图10也提供了一个消除自振荡的可能性,即如果能增加负载端的阻尼d2,使G(jω)不进入第二象限,那么理论上是可以消除自振荡的。
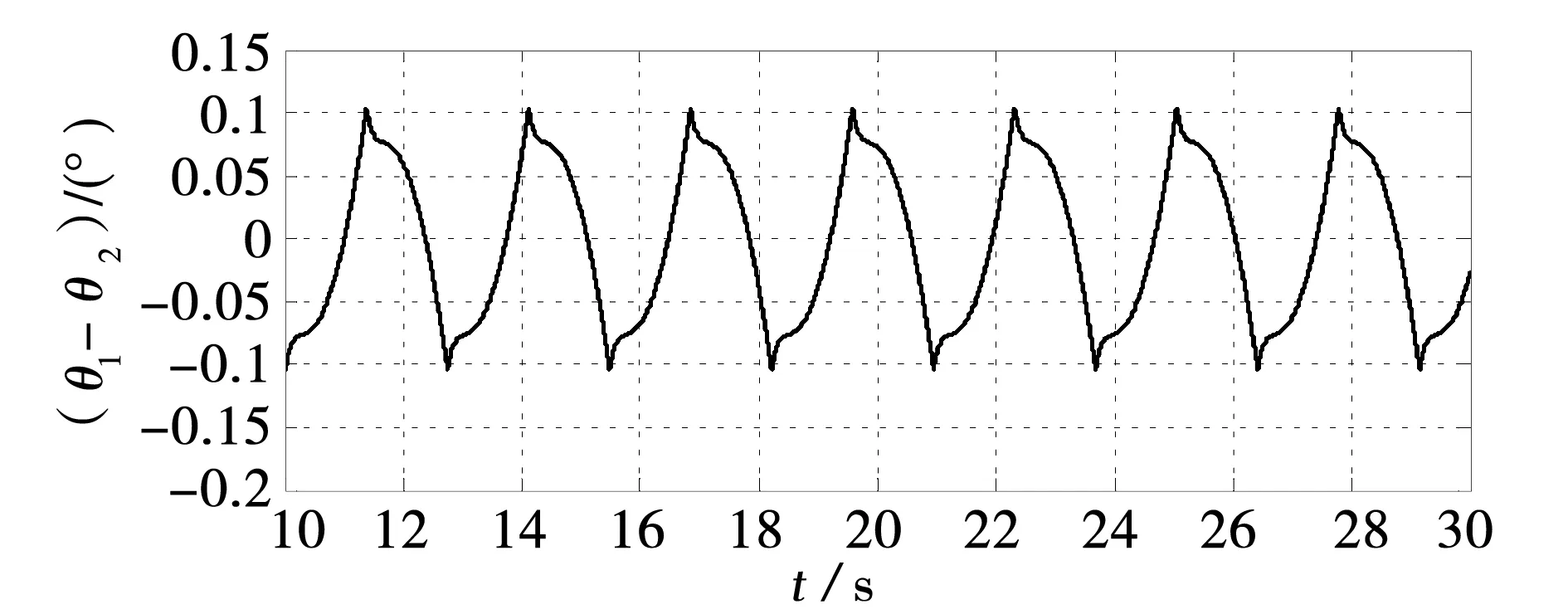
图11 (θ1-θ2)的波形Fig.11 (θ1-θ2) wave shape
3 结 论
齿隙位于系统的输出端时(无力矩传递),齿隙特性要用滞环描述,系统会出现自振荡,这一般都是认同的。但是当有力矩传递时,齿隙要用死区特性来描述,死区也同样会引起自振荡,即三明治系统也很有可能出现自振荡,这在文献中却少有讨论,本文主要是指明了这一点。本文的内容将有助于了解这种自振荡出现的可能性。另外,就齿隙系统本身来说,本文的工作对于当前正在开展的齿隙补偿和有关的优化设计的研究[1,7]也是有益的,可以为齿隙系统的进一步的性能设计提供保障。
[1] TAO G,MAN X,LING Y.Optimal and nonlinear decoupling control of systems with sandwiched backlash[J].Automatica,2001,37(2): 165-176.
[2] QIU D,SUN M,WANG Z,et al.Practical wind-disturbance rejection for large deep space observatory antenna[J].IEEE Trans.Control Systems Technology,2014,22(5): 1983-1990.
[3] GAWRONSKI W.Control and pointing challenges of large antennas and telescopes[J].IEEE Trans.Control Systems Technology,2007,15(2): 276-289.
[4] BORRELLO M.A multi stage pointing acquisition and tracking (PAT) control system approach for air to air laser communications[C]//2005 American Control Conference,June 8-10,2005,Portland,OR,USA.2005:3975-3980.
[5] TAN Y,DONG R,LI R.Recursive identification of sandwich systems with dead zone and application[J].IEEE Trans.Control Systems Technology,2009,17(4): 945-951.
[6] NORDIN M,GALIC J,GUTMAN P.New models for backlash and gear play[J].International Journal of Adaptive Control and Signal Processing,1997,11(1): 49-63.
[7] NORDIN M,GUTMAN P.Controlling mechanical systems with backlash-a survey[J].Automatica,2002,38(10): 1633-1649.
[8] 裴润,宋申民.自动控制原理(上册)[M].哈尔滨:哈尔滨工业大学出版社,2006:400-401.
(编辑:刘琳琳)
Modeling and limit cycle analysis for systems with backlash
WANG Yi1, HE Zhen1, MENG Fan-wei2
(1.School of Astronautics,Harbin Institute of Technology,Harbin 150001,China;2.School of Control Engineering,Northeastern University at Qinhuangdao,Qinhuangdao 066004,China)
For the problems that all systems with backlash are likely to oscillate,the conditions for self-oscillation were discussed.It shows that there are different nonlinear characteristics for the backlash at different positions of the system.If there are torques transmitted through the gear train,the backlash must be modeled as a dead zone,where the system is of sandwich structure: a dead zone between two dynamic blocks.If the gear train is at the output of the system,then the backlash is modeled as a hysteresis characteristic.Whenever in the dead-zone case or hysteresis case,the systems all are likely to oscillate under certain conditions.It is pointed out that for the sandwich system,there are multiple feedback loops surrounding a dead zone,so the stability problem may exist naturally with such system structures.The describing function method is used to analyze the limit cycles of the sandwich system.It shows that the system with sandwiched backlash also has the tendency to oscillate just like a system with hysteresis.Measures to alleviate the problem of self-oscillation were also discussed.
backlash; sandwich system; hysteresis; limit cycle; describing function
2016-05-30
国家自然科学基金 (U1564207)
王 毅(1967—),男,博士,副教授,研究方向为高精度伺服系统和摩擦补偿; 何 朕(1972—),女,博士,教授,研究方向为控制系统设计、鲁棒控制及H∞控制等; 孟范伟(1981—),男,博士,讲师,研究方向为鲁棒控制与H∞控制。
孟范伟
10.15938/j.emc.2017.03.011
TP 273
A
1007-449X(2017)03-0078-05