PMSM断电-重投时的冲击电流研究
2017-03-29高雅刘卫国骆光照
高雅, 刘卫国, 骆光照
(1.西安工业大学 电子信息工程学院, 陕西 西安 710021;2.西北工业大学 自动化学院,陕西 西安 710129)
PMSM断电-重投时的冲击电流研究
高雅1, 刘卫国2, 骆光照2
(1.西安工业大学 电子信息工程学院, 陕西 西安 710021;2.西北工业大学 自动化学院,陕西 西安 710129)
当原有机车牵引用的感应电机利用永磁同步电机代替时,由于永磁同步电机在经过分相绝缘子时永磁体的存在会产生高的反电动势使断电后重投瞬间出现不可控冲击电流。针对该问题在永磁同步电机三相瞬态数学模型的基础上,对其瞬态冲击电流产生原因进行了分析研究,该分析过程主要是建立在带谐波的PWM调制波的基础之上。根据分析结果,对重投时的控制条件和控制方法进行了探讨性研究,如对给定转速进行了一定的限制,对逆变器重投瞬间的电压幅值和相位进行了一定的控制,利用滑模控制的强鲁棒性和抗干扰性代替了PID控制。最后,设计了一种使重投瞬间冲击最小的滑模控制系统。经实验和仿真对比分析,验证了瞬态冲击产生机理分析的有效性及设计的控制系统在抑制断电-重投瞬间电流冲击强度的积极作用。
永磁同步电机; 断电-重投;寻优控制;瞬态冲击电流;滑模控制
0 引 言
在电气化铁道中接触网为了满足电力系统的三相负载平衡,基本都采用单相交流工频25 kV循环换相的供电方式。即每间隔20 km机车受电弓通过一个分相绝缘器进入另外一供电相。在进出分相绝缘器时,机车受电弓必须是无电状态,此时电机驱动器必须断电,机车以一定的速度借助惯性滑行,通过分相区后再重新投入逆变器的电源,电机驱动系统经历了一个断电-重投的过程。
目前,高速牵引机车采用感应电机,但其存在效率及功率因数低、体积大等缺点,使能源利用率不高。随着环境污染问题和能源问题日益严峻、高速轨道交通的快速发展,人们对新一代绿色节能轨道机车的牵引电动机提出了越来越高的要求。而在交流传动领域,永磁同步电机(permanent magnet synchronous motor,PMSM)与感应电机相比具有体积小、重量轻、效率和输出功率密度高、启动转矩大、结构简单、运行可靠以及调速范围宽等显著优点,所以永磁同步电机作为机车的牵引电机已成为一个新的研究方向[1]。目前,国外在这方面的研究已经取得了一定的进展,而国内相关的研究还正处于起步阶段。
PMSM与感应电机相比,感应电机励磁磁场可调,而PMSM的励磁磁场不可调,在轨道交通上由于供电方式的特殊性,过绝缘子电源换相后由于机车仍然具有一定高的速度,感应电机的励磁部分由定子绕组控制,断电时可以断开定子绕组,使励磁磁场可以控制的几乎为零,仅剩剩磁部分,即重投时励磁磁场为可控量,反电动势可以通过调整磁场进行控制。而PMSM不管在断电还是重投时其励磁磁场不变,即重投时的反电动势主要由速度决定,在重投时当机车具有高的速度,会造成反电动势比较大,不合适的重投控制方式会引起大的冲击电流,从而造成相关部件的毁坏[2]。当负载为机车等大惯量负载断电时,电机速度衰减很慢,重新投入电源时,当高的转速存在,而转子励磁磁场不变时,定子绕组产生高反电动势。如果控制中忽略反电动势的作用,将引起大的冲击电流损坏电机控制系统甚至使整个机车的供电系统瘫痪。
国外,以日本铁路公司、东芝公司、西门子公司、阿尔斯通公司和庞巴迪公司为代表的轨道交通装备制造企业竞相开展了永磁同步牵引系统的研究,现已完成样机的开发和实验考核,逐渐进入工程化和商业化的应用阶段;而国内中国南车集团现已完成了试制阶段,已进入专车考核阶段,但其特殊情况下的故障处理方法仍属于其需要继续研究的范畴[3]。
国内关于永磁同步电机断电-重投瞬态分析和如何减小冲击的方法研究公开文献较少。电机的断电-重投瞬态分析主要集中在感应电机方面。早在上世纪八十年代,Htsui 就针对感应电机断电-重投过程进行研究,分析了电机内部的气隙、动态转矩幅值、频率及其影响因素,并据此提出感应电机重投过程的导通逻辑[4-6]。此后,多位学者分别就瞬态电压下跌时系统稳定性[7]、最优重投时刻[8]、重投过程中残压[9]等展开深入探讨。文献[10]通过建立空间矢量下的感应电机模型,研究失电后电机内部的电磁变化律,推导失电残压解析式,分析不同时刻恢复电源时的冲击强度。文献[11]列出了三相感应电机起动、断电和重新投入电网时的运动方程,着重研究了定子断电后定子电流、转速、转角等初始位的确定,以及最不利的重投时间。文献[12]通过实例对瞬时电压骤降引起的三相感应电机瞬态运行过程进行了计算机仿真计算。
PMSM与感性电机一样,是一个多变量、强耦合、非线性、变参数的复杂对象。采用常规PID控制受参数和外界干扰影响比较大。而现代控制理论为PMSM的控制性能提高提供了一定的理论基础。如自适应控制、模糊控制、神经网络控制、鲁棒控制和滑模控制等[13-15]。而滑模控制由于对系统数学模型的精度要求不高,对系统参数变化、外界环境扰动以及内部摄动等具有完全的自适应性、具有很强的鲁棒性、并且算法简单,易于工程实现。在交流调速系统控制领域展示了良好的应用前景。
本文从带有谐波分量的PWM调制电压出发,从电压投入角度、幅值和三相电压相位等方面考虑,分析了断电-重投瞬间电流冲击产生机理。其中包含电压大小和投入角度对冲击的作用量、给定转速对控制电流和转矩冲击的影响;结合实验和仿真结果对电流冲击强度及产生电流冲击的影响因素进行了对比分析,并利用了滑模控制设计了一种使断电-重投时冲击减小的闭环滑模控制系统,其中包括一个逆变器模拟控制器和寻优控制器等。该研究提出的方法可以一定程度地减小冲击,为以后该方面的进一步研究奠定基础。
1 PMSM重投时带谐波的电流分析
1.1 PMSM数学模型
PMSM数学模型为:
(1)
假设电机内部磁场不饱和时,上面ia与φa的关系可以写为raia=Ka1φa,其中Ka1是与A相定子绕组电阻、永磁体和B、C相电流等有关的常系数。用同样的方式表示rbib和rcic。式(1)可表示为:
(2)
1.2 逆变器输出SPWM波形的三相电压
设逆变器输出的每半周期所含脉冲个数为k即k=T/2Ts=fs/2f,其中:Ts为脉冲宽度;fs为脉冲频率;f为逆变器输出频率;T为输出周期。每个脉冲的开通角和可关断角分别设为a2i-1和a2i(i=1,2,…)。在选定的坐标下,3种波形都是奇函数,且每半周期都具有对π/2角度的对称性。这种波形的傅立叶级数展开式中不含有常数项、偶次谐波和余弦系数an。输出电压可展开为:
(3)
第n次谐波幅值bn为
(4)
对于偶数k可知幅值bn为
(5)
对于奇数k可知幅值bn为
(6)
对于可变脉宽多脉冲调制的逆变器输出电压的基波和第n次谐波幅值Ua(t)为:

(7)
(8)
上面的电压值是针对相位从零开始的值,如果该相位不是从零开始,有一个初始相位,上面的Ua(t)公式应该为:
(9)
上面j=1,2,…,n=2j-1,ψ1为基波初始相位[16]。
1.3PMSM重投时带谐波分量的冲击分析
一次微分非奇次线性方程公式为:
(10)
根据上式计算带有谐波分量时的三相磁场φa(t)为:
(11)

(12)

(13)

Bsin[n(ψ2+δ)-90°]]}=

(14)
Cae-Ka1t/N1。
(15)
在空载情况下,永磁磁场超前于反电动势90°,假设三相对称,则Ka1=Kb1=Kc1。当t=0时,基波及各次谐波的磁场冲击为:
(16)
1.3.1 瞬态衰减分量幅值分析
当永磁体磁场和电枢磁场、相位差满足一定要求时,各个频率的磁场幅值都为零,其瞬态衰减分量为零。假设φm=φf+Δφ,Cn0可写为:
(17)

1.3.2 瞬态衰减分量三相磁场冲击分析
从上面分析知,通过对断电重投时刻的电枢磁场、电枢和永磁体磁场相位差的合理控制,理想状态时可以使瞬态衰减分量为零。但由于反馈值、控制方式和硬件延时等的误差存在,无法使其幅值控制在零,但可以使其尽量接近于零。由于机车使用的牵引电机功率比较大,其小的瞬态衰减分量,也不能忽视。下面分析当存在一定小量的衰减分量时,即C0≠0时,三相冲击强度的比较及在不同相位之间冲击强度的差量。
下面为不同频率时的瞬态衰减分量:
(18)

从上面分析知,带有谐波含量的PWM调制电压的瞬态衰减分量大小与重投瞬间逆变器电压幅值、转速、逆变器电压和反电动势重投瞬间的初始相位有关。当该两个量满足一定要求时,电机某一相内部不含瞬态衰减分量磁通,合闸后可以立即进入稳态。但如果在三相同时投入的前提下,不能通过合理的控制使三相同时瞬间进入稳态,但可以通过合理的投入点选择和控制,使三相中的最大冲击相的冲击强度保证在其允许的范围。
2 断电-寻优重投控制系统设计
图1为设计的寻优重投控制系统框图,主要由给定转速计算模块、电压模拟模块VSC、滑模控制器和寻优控制器等组成。

图1 PMSM断电-寻优重投时的滑模控制系统框图Fig.1 Block diagram of PMSM power down-optimizing and rejoining on control system
2.1 给定转速

对比以上两种机械运动状态,电机的电磁转矩Te与转速和转速变化率有关,当给定转速大于ω0(ω0为重投瞬间电机实际速度,根据机车运行方向设ω0>0)时,给定转速越大,需要的电磁转矩越大,即需要的q轴电流越大;当给定转速小于ω0时,存在某一个值使重投瞬间需要的电磁转矩为零,而当给定转速小于这个值时,瞬间需要产生一个负的电磁转矩,使力平衡。假设给定转速是电磁转矩为零的点,重投过程将是一个转矩从零到一定值的平稳过渡过程,即q轴电流为一个平稳的过渡过程。
2.2 模拟逆变器
断电重投时,端部电压Uabc和反电动势Eabc的幅值和相位差对冲击大小起主导性作用,所以两者的实时测量和分析对于重投点的选择至关重要。根据当前的控制要求,检测到对应的端部电压和反电动势需要在电机和逆变器之间加入一个机械开关,当投入时将其开通,当断电时将其关断。
(19)
其中:i=1,3,5;t>=0;ud为逆变器直流侧母线电压;V1(t),V3(t),V5(t)分别为逆变器α,b,c三相上桥臂IGBT器件开关控制信号,V2(t),V4(t),V6(t)分别为逆变器α,b,c三相下桥臂IGBT器件开关控制信号;通过实时检测并不断地与反电动势Eabc进行对比;当断电后关闭可控器件控制端的开关KA,当满足重投条件时,开通逆变器可控器件。原来在主线路上的机械开关开通和关断时有可能存在大电弧,而本设计中将开关加在控制线路上,减小了机械开关本身的机械冲击。
2.3 寻优控制器中相位差和幅值差的实时校准

当相位差的误差超出误差范围时,改变位置补偿角Δθ*,当电压幅值差的误差超出误差范围时,改变转速误差值Δω*直到满足误差条件。
2.4 滑模控制器的设计
该控制器包括确定切换函数s(x)和控制函数u的求解。根据滑模控制原理,滑模可达性条件仅满足由状态空间任何位置运动点在有限时间内到达切换面的要求,而采用趋近律可以有效的改善趋近运行的动态品质[17-18]。运用的指数趋近律为

其中ε表示系统的运动点趋近切换面s=0的速率,而指数趋近律中的指数项解为s=s(0)e-kt,从中可知,在趋近过程中,趋近速度逐渐的减小到零,缩短了趋近时间而且使到达切换面的速度变小。但指数趋近律由于存在开关信号,存在抖振现象,利用饱和函数式(19)代替了符号函数sgn(s)。其中Δ为“边界层”。
(20)
设有噪声干扰的速度控制器的状态方程和输出方程为:

(21)
y=Cx+v。
(22)
s=Ce(ω*-ω)。
(23)
(24)
iq= (CeB)-1(εsat(s)+ks-CeAω)+
(25)
3 仿真和实验结果
在基于DSP的永磁同步电动机实验平台上进行了实验,图2为现场实验装置。

图2 现场实验装置 Fig.2 Field experimental device
实验所用永磁同步电动机参数为:永磁体磁链ψf为1.597 6;直轴电感Ld为5.4×10-3H;交轴电感Lq15.5×10-3H;定子绕组电阻Rs为23.2×10-3Ω;转动惯量J为5kg·m2;额定功率为120kW;额定电压为400V。
图3中第1、2、3条曲线分别为B相、A相和C相电流波形。图3(a)和图3(b)分别为以重投瞬间检测速度为给定速度,以反电动势电压幅值、相位为重投瞬间给定电压幅值、相位,以A相电压零点为重投条件,两次不同时间的重投实验波形。从两次不同时间和每次同一时间电机不同状态下重投的瞬间冲击波形分析知:无论电机重投时刻状态如何,通过实时检测、校准和确定给定条件的方法能使其重投瞬间的冲击强度基本一致,即验证了设计方法对冲击强度的可控性。以上两次实验均是以逆变器A相重投电压零点为条件的结果。
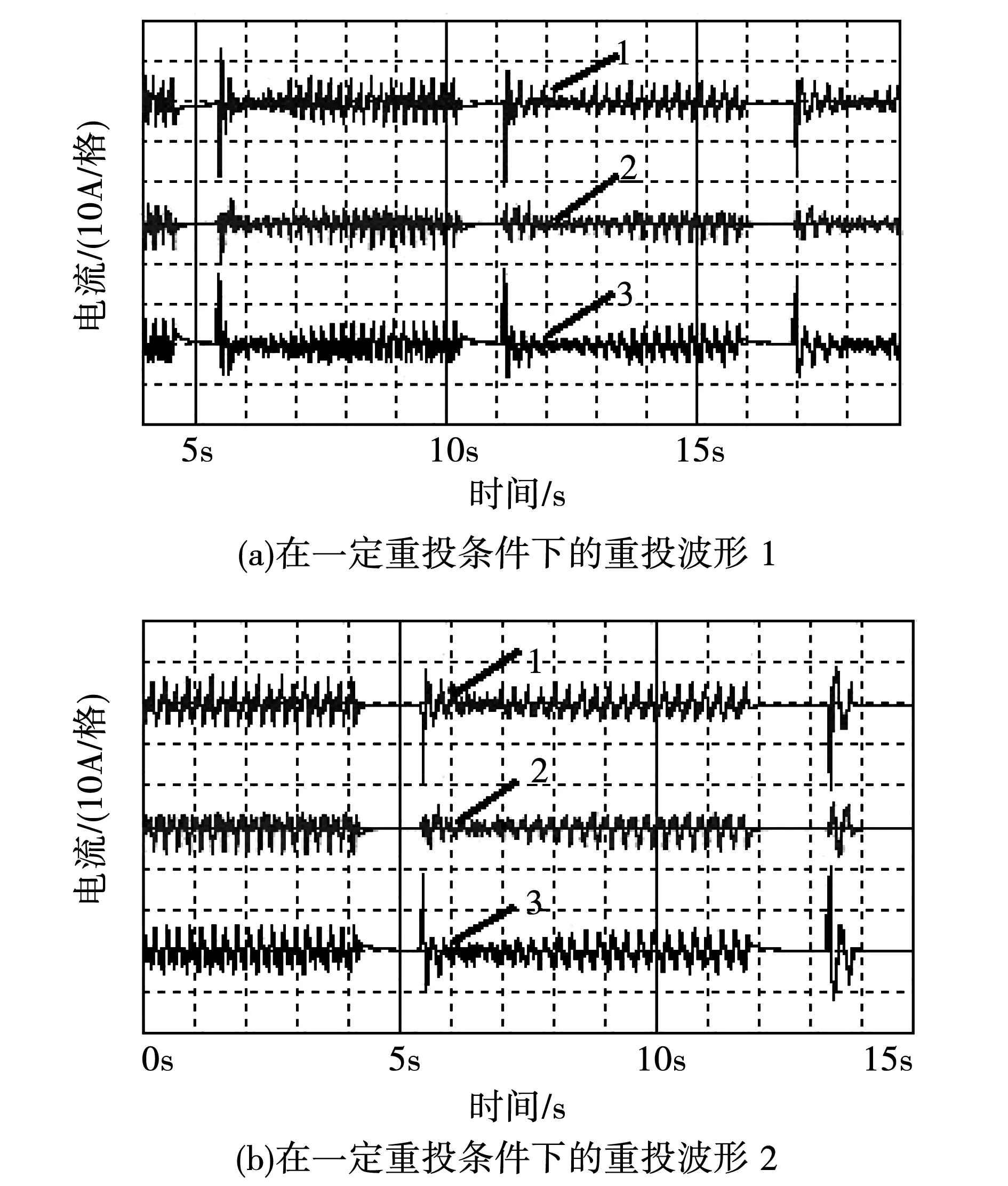
图3 两次不同时间重投条件相同时的重投电流波形Fig.3 Current waveform when the different time and the same condition
图4为断电重投时的给定转速等于实际运行转速时的电流波形。图5和图6分别为PID控制系统和滑模控制系统重投时给定转速与实际运行转速差不同所检测到的电流波形。对图4、图5和图6进行对比分析可知:在0-0.2s的开始阶段实际运行速度与给定转速越接近,电流越小;即给定转速越接近实际运行转速,需要的最大电流越小。对图5和图6的电流波形进行对比可知:利用滑模控制的系统控制性能更优,在重投时其电流较PID控制小,且趋于稳定的时间明显小于PID控制。

图4 给定转速与运行转速相等时的电流Fig.4 Current waveform when the running speed of rejoining on is equal to the given speed

图5 当重投时PID控制系统的电流波形Fig.5 Current waveforms of the PID control system when rejoining power on
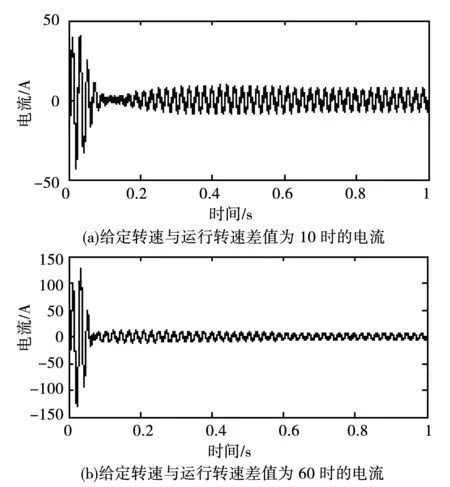
图6 当重投时滑模控制系统的电流波形Fig.6 Current waveforms of the sliding mode control system when rejoining power on
4 结 论
本文主要从带谐波含量的PWM调制电压出发,对永磁同步电机用在牵引机车时,过电源分相区重投后电流冲击大的问题,进行了探讨性理论分析和实验研究,得到了部分冲击产生的原因。根据分析结果,设计了一种闭环的断电-重投瞬间冲击减小的滑模寻优控制系统。根据实验结果,该系统能够有效地控制冲击强度及将其抑制在一定的可控范围内。该研究对于后面永磁同步电机在牵引机车上的实际应用具有一定的指导意义。
[1] 冯江华.轨道交通永磁同步牵引系统研究[J].机车电传动,2010,5(9): 15-21. FENG Jianghua.Study on permanent magnet synchronous motor drive system of rolling stock[J].Electric Drive for Locomotives,2010,5(9): 15-21.
[2] 冯江华,桂卫华,符敏利,许峻峰.铁道车辆牵引系统用永磁同步电机比较[J].铁道学报,2007,29(5): 111-116. FENG Jianghua,GUI Weihua,FU Minli,et al.Comparison of permanent magnet synchronous motors applied to railway vehicle traction system[J].Journal of the China Railway Society,2007,29(5): 111-116.
[3] 冯江华.轨道交通永磁同步牵引系统的发展概况及应用挑战[J].大功率变流技术,2012(3): 1-7. FENG Jianghua.Development overview and application challenges of permanent magnet synchronous traction system for rail transit[J]. High Power Converter Technology,2012(3): 1-7.
[4] J S C Htsui.Non-simultaneous reclosing air-gap transient torque of induction motor:parti,analysis and computation logic[J].IEEE Transactions Energy Conversion,1987,2(2):269-275.
[5] J S C Htsui.Non-Simultaneous Reclosing Air-Gap Transient Torque of Induction Motor: Part II,Sample Studies and Discussion on Reclosing of ANSI C50.41[J].IEEE Transactions Energy Conversion,1987,2(2): 276-284.
[6] J S C Htsui.Magnitude,Amplitudes and frequencies of induction-motor air-gap transient torque through simultaneous reclosing with or without capacitors[J].IEEE Transations on Power Apparatus and Systems,1985,104(6): 1519-1525.
[7] J C Das.Effects of momentary voltage dips onthe operation of induction and synchronous motors[J].IEEE Transactions Industrial Application,1990,26(4):711-718.
[8] J.Fail,M.Ghaneei,A.Keyhani.performanceanalysis of fast reclosing transients in induction motors[J].IEEE Transations on Energy Conversion,1999,14(1):101-107.
[9] WANG A,LING Z,LIU W.Residual voltages analysis in reclosing process for induction machine[C].in Proc.7th World Congress on Intelligent Control and Automation (WCICA).2008,4785-4788.
[10] 高吉增,杨玉磊,崔学深.感应电动机失电残压的研究及其对重合过程的影响[J].电力系统保护与制,2009,37(4): 45-48. GAO Jizeng,YANG Yulei ,CUI Xueshen.The research of the residual voltage of induction motor after dumping and its influence during restoration[J].Power System Protection and Control,2009,37(4):45-48.
[11] 汤晓燕.三相感应电动机瞬态断电重新投入电网时的瞬态[J].电机与控制学报,2001,5(2): 98-102. TANG Xiaoyan.Reclosing transient of three pha-se asynchronous motor[J].Electric Machines and Control,2001,5(2): 98-102.
[12] 谢可夫.瞬时电压骤降时三相感应电动机瞬态分析[J].湖南师范大学自然科学学报,2003,26(4): 47-50. XIE Kefu.Transient analysis of three-phase induction motor with momentary voltage dips[J].Journal Nature Science Hunan Norm University,2003,26(4): 47-50.
[13] CHE Guolin,LAI Hua.Application of high frequ- ency signal injection method in PMSM control usi- ng fuzzy Kalman filtering algorithm[C].Applied M-echanics and Materials,2014: 2274 -2278.
[14] Zadeh,Yazdian,Mohamadian.Robust position control in DC motor by fuzzy sliding mode control[J].Power Electronics,Electrical Drives,Automation and Motion,2006,23(26): 1413-1418.
[15] 李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34 (3): 431-437. LI Zheng,HU Guangda,CUI Jiarui,et al.Sliding-mode variable structure control with integral action for permanent magnet synchronous motor[J].Proceedings of the CSEE,2014,34 (3): 431-437.
[16] 林辉,王辉.电力电子技术[M].武汉:武汉理工大学出版社,2002: 131-133.
[17] 王颢雄,肖飞,马伟明,等.基于滑模观测器与SPLL的PMSM无传感器控制[J].电机与控制学报,2011,15(1):49-54. WANG Haoxiong,XIAO Fei,MA Weiming,et al.Sensorless control of PMSG based on sliding modeobserver and software phase locked-loop[J].Electric Machines and Control ,2011,15(1):49-54.
[18] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005:22-30.
(编辑:张 楠)
Research of surge current for PMSM when power down-rejoining on
GAO Ya1, LIU Wei-guo2, LUO Guang-zhao2
(1.Electronic Information Engineering College,Xi′an Technological University,Xi′an 710021,China;2.School of Automation,Northwestern Polytechnic University,Xi′an 710129,China)
If the original asynchronous motor of engines is replaced by permanent magnet synchronous motors,the unpredictable surge current will emerge when power down-rejoining on.The causation is the high back EMF of permanent magnet arising from PMSM when engine is passing the switching phase insulator.Aiming at above-mentioned problems,the reasons was analyzed of causing transient surge current based on three-phase PMSM transient mathematical model in the process of power down-rejoining on.The analyzing process is based on the PWM voltage which takes voltage harmonics into account.According to the analyzing results,the control strategies and conditions during the power down- rejoining process were discussed.The control conditions include the given speed,the voltage amplitude and phase of inverter and so on.A control system was designed that makes the transient surge current minimum in the process of power down-rejoining on.By the comparative analysis of simulations and experiments,the validity of analysis for transient surge current mechanism is verified,and the positive function of optimizing control system is illustrated when reducing the transient surge current in power down-rejoining on.
permanent magnet synchronous motor; power down-rejoining on; optimizing control; the transient surge current; sliding mode control
2015-03-03
国家自然科学基金(51177135);陕西省农业科技创新与攻关项目(2016NY-164)
高 雅(1982—),女,博士,研究方向为电机运动控制技术; 刘卫国(1960—),男,博士,教授,博士生导师,研究方向为稀土永磁电机及控制技术; 骆光照(1972—),男,博士,教授,博士生导师,研究方向为电机控制技术。
高 雅
10.15938/j.emc.2017.03.008
TM 315
A
1007-449X(2017)03-0055-08