单周期控制在牵引传动系统拍频抑制中的应用
2017-03-29宋文胜孙晓江才
宋文胜, 孙晓, 江才
(西南交通大学 电气工程学院,四川 成都 610031)
单周期控制在牵引传动系统拍频抑制中的应用
宋文胜, 孙晓, 江才
(西南交通大学 电气工程学院,四川 成都 610031)
针对电气化铁路单相交流供电及列车网侧牵引变流器拓扑特点所引起的牵引电机拍频问题,首先分析了直流侧电压存在2倍电网频率脉动的特征,针对直流侧无LC滤波器的交-直-交电力牵引传动系统,揭示了当逆变器的工作频率接近2倍电网频率时电机拍频现象最为严重的原因。然后利用单周期控制在输入电压脉动时仍能满足伏秒平衡的原理,并结合间接转子磁场定向矢量控制,提出将单周期控制算法作为牵引逆变器的调制策略,实现牵引逆变器-电机系统的无拍频控制。最后,搭建基于OP5600/RT-LAB实时仿真器与DSP TMS320F2812控制器的牵引传动系统半实物实验平台,对传统空间矢量脉宽调制与单周期控制算法进行了半实物实验对比验证,结果表明单周期控制算法能有效地抑制电机的拍频现象。
牵引逆变器;牵引电机;拍频现象;单周期控制;空间矢量脉宽调制
0 引 言
在高速列车电力牵引传动系统中,其网侧牵引变流器为单相脉冲整流器拓扑,则其直流侧电压存在2倍电网频率的纹波[1-4]。当该2倍电网频率的直流侧脉动电压较大时,将会引起牵引电机定子电流纹波和转矩脉动增大的现象,即电机拍频现象[4]。电机定子电流谐波过大会导致电机发热严重甚至烧坏电机,电机转矩抖动会产生噪声甚至损坏转轴[1-6],因此,消除电机拍频现象是实现列车平稳和安全可靠运行的条件之一。
在牵引变流器直流侧加入LC谐振电路,吸收二次脉动功率,可以有效抑制拍频现象。但谐振电路由电容、电感组成,存在体积大、笨重、不利于实现高速列车电力牵引传动系统轻量化的缺点。目前我国部分高速列车已取消了直流侧的LC谐振滤波装置,如CRH2、CRH5型动车组[1-2,7]。
为了实现高速列车轻量化且保证列车平稳可靠运行,牵引传动系统应实现在无LC谐振电路的情况下,通过对逆变器采取特殊的控制和调制策略来消除拍频现象。文献[1]提出在转速环中注入脉动分量以补偿牵引逆变器的工作频率,抑制拍频现象。但引入了高次谐波,影响逆变器的高频特性。文献[2-3]分别提出了用于异步调制和方波控制的单周期控制算法来抑制拍频现象,理论分析和实验验证均证明了该算法的有效性。文献[4]提出了离散化的无拍频控制算法,优化了脉动电压采样方法并选取双线性变换法对控制器进行离散化处理。文献[5]利用母线电压脉动的重复性来精确预测母线电压。利用伏秒平衡修正逆变侧脉冲宽度,从而减小牵引电机拍频电流。与传统前馈补偿算法不同,该算法在低开关频率下效果更好。文献[8-9]提出在单脉冲控制区,通过瞬时补偿逆变器工作频率来抑制拍频现象,但两文中均将直流侧平均电压幅值视为恒值,未考虑实际中功率变化对直流电压的影响。文献[11]基于同步旋转坐标系分析模型,推导了无拍频控制算法的传递函数,但计算复杂。
单周期控制是一种基于模拟电路的非线性大信号控制技术,具有算法简单、动态响应快等特点。且输出信号可随输入信号的变化时时调整,具有输出完全拒绝输入扰动的优点[13],且相同开关频率下较三相标准七段式空间电压矢量脉宽调制(space vector pulse width modulation,SVPWM)开关切换次数少。因此本文在文献[2-3]的研究基础上,对整流器直流侧的电压脉动、拍频现象和单周期控制算法进行了理论分析,利用单周期控制算法作为逆变器的调制策略,结合牵引电机间接转子磁场定向矢量控制,给出了基于单周期控制的牵引逆变器-电机系统无拍频控制方案,并与传统算法进行了半实物实验对比验证。
1 拍频机理分析
1.1 整流器直流侧电压脉动机理分析
单相两电平脉冲整流器的网压us和网流is分别定义为:
(1)
(2)
式中:Us和Is分别为整流器网压us和网流is的有效值;ω为电网角频率;θ为网流is滞后网压us的相位角。
则该单相脉冲整流器的瞬时输入功率Pin可表示为
Pin=usis=UsIscosθ-UsIscos(2ωt-θ)。
(3)
根据功率守恒可得整流器的输入功率等于输出功率和损耗功率。忽略功率损耗,则输入与输出功率相等。输出功率Pout等于支撑电容Cd消耗的功率Pc与等效负载RL消耗的功率PR之和。
考虑整流器输出电压中纹波分量的影响,可设其输出电压ud的数学表达式为
ud=Ud+udc。
(4)
式中:Ud为输出电压的稳态分量;udc为输出电压的纹波分量。
由式(4)可得输出功率Pout的表达式为
(5)
式中Id为输出电流的稳态分量。
联立式(3)、式(5)得,输出电压纹波分量为
(6)
由式(6)可知,直流侧纹波电压udc与直流电流Id、功率因数角θ和支撑电容Cd有关,纹波电压的频率是电网频率的2倍。直流电流Id由牵引传动系统的输出功率决定,当输出直流电压Ud一定时,Id随着牵引传动系统输出功率的增大而增大。由于cosθ为网侧功率因数,一般近似为1,故cosθ对直流侧纹波电压的影响可以忽略。因此,当牵引传动系统的输出功率一定时,可以通过增大支撑电容容量的方法来减小直流侧纹波电压的幅值。
1.2 牵引逆变器相电压谐波特性
1.1节推导了整流器直流侧纹波电压的数学表达式,该纹波电压将导致牵引逆变器输出相电压含有谐波,本节将对牵引逆变器输出相电压谐波分量做具体分析。
假设所有开关器件均为理想开关,牵引逆变器的开关函数di定义如下
(7)
式中:ωs和δk分别为逆变器输出相电压的角频率和相位角,Aik为逆变器第i桥臂k次谐波的幅值系数,且与kωs成反比,k为奇数。逆变器输出相电压ui可以表示为
ui=diud=diUd+diudc,(i=a,b,c)。
(8)
等式右边第二项是由直流侧纹波电压引起的牵引逆变器输出相电压分量,即本节要讨论的逆变器输出相电压谐波分量,故令
Δui=diudc,(i=a,b,c)。
(9)
将式(6)和式(7)代入式(9)得
(10)
由式(10)可得,牵引逆变器输出相电压谐波分量的角频率ωripple可以表示为
(11)
由于Aik与kωs成反比,因此高次谐波分量幅值较小,可以忽略,故牵引逆变器输出相电压谐波主要由幅值较大的低次谐波组成,即角频率为2ω和2ω±ωs的谐波分量。由式(10)可知,牵引逆变器三相输出均含有角频率为2ω的谐波分量,当牵引逆变器的输出端接牵引电机时,由于牵引电机是三相对称结构,角频率为2ω的谐波分量被抵消,相电压谐波主要是角频率为2ω±ωs的谐波分量。
1.3 牵引电机定子电流谐波特性
1.2节推导了牵引逆变器输出相电压谐波特性,该相电压谐波会导致牵引电机的定子电流含有谐波,故本节将借鉴文献[12]的频域分析方法具体分析牵引电机定子电流的谐波特性。
假定牵引逆变器工作频率发生变化时,牵引电机的电阻和电感均不随之变化,则牵引电机等效电路阻抗可用电网角频率ω和转差率s表示。即
(12)
定义:si为牵引电机的瞬时转差率,i为牵引逆变器输出电压的瞬时基波角频率,则牵引电机的转速可用(1-si)ωi表示。如果si保持不变,则拍频分量可表示为
(13)
式中ωr=2ω。
k取1时,绘制出牵引电机等效阻抗幅值随牵引逆变器工作频率变化的特性曲线,如图1所示。
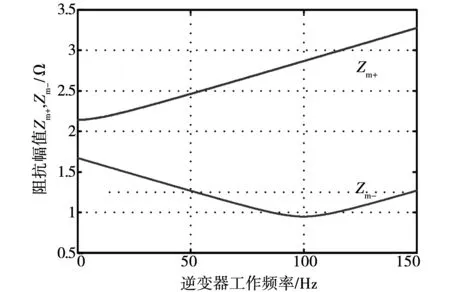
图1 牵引电机等效阻抗的特性曲线Fig.1 Equivalent impedance characteristics of the traction motor
图1中的Zm+、Zm-分别表示角频率为2ω+ωs、2ω-ωs时的逆变器相电压谐波作用于牵引电机时,牵引电机的等效阻抗幅值。由图1可得,当角频率为2ω+ωs的逆变器相电压谐波作用于牵引电机时,牵引电机等效阻抗幅值随工作频率的升高而升高。当角频率为2ω-ωs的逆变器相电压谐波作用于牵引电机时,牵引电机等效阻抗幅值随逆变器工作频率的升高,先减小后增大,且一直较小。因此,拍频电流主要是角频率为2ω-ωs的逆变器相电压谐波引入的牵引电机定子电流低频谐波。且当逆变器工作频率为直流侧电压脉动频率(100 Hz)时,等效阻抗幅值最小。此时较小的谐波电压也能引起较大的谐波电流。因此,当逆变器工作频率在100 Hz附近时,牵引电机定子电流低频谐波含量很高,会引发电机转矩脉动、转速跳变、转动噪声和额外的功率损耗等拍频现象,严重影响系统的稳定性和乘客的舒适性。
2 基于单周期的无拍频控制策略
2.1 单周期控制电路的工作原理
单周期控制技术是一种针对电力电子变换器的大信号非线性模拟控制技术,是1991年由美国加州理工学院Keyue Smedley和Slobodan Cuk提出的用于DC-DC变换器的控制技术[10]。基本电路包括可复位积分器、比较器、RS触发器、时钟信号产生电路和逻辑电路等,由模拟电路组成,因此动态响应快、开关频率固定、性能稳定且易于实现。图2是单周期控制器恒定开关频率下的原理图。

图2 恒定开关频率下单周期控制器的原理图Fig.2 Schematic diagram of one-cycle controller with constant switch frequency
该控制电路在一个开关周期内,输出y(t)满足式(14),即一个开关周期内,开关S的导通时间由参考信号Vref决定,因此单周期控制器能够根据参考信号Vref的变化迅速调整开关的导通时间ton,以保证每个开关周期结束时,输出y(t)的平均值都能与-Vref严格相等。因此,该控制电路被称为单周期控制。
(14)
2.2 三相逆变器物理解耦
图3给出了传统的三相逆变器拓扑结构,E代表直流侧电压,va,vb,vc代表三相逆变器输出相电压。假定开关频率远高于调制波频率,可将三相桥臂等效成3个压控电压源,得到逆变器的等效开关周期平均模型,如图4所示[11]。
图4中,dap,dbp和dcp分别对应开关Sap,Sbp和Scp的占空比。详细分析得到输入和输出关系式为
(15)

图3 传统三相逆变器拓扑结构图Fig.3 Topology of traditional three-phase inverters
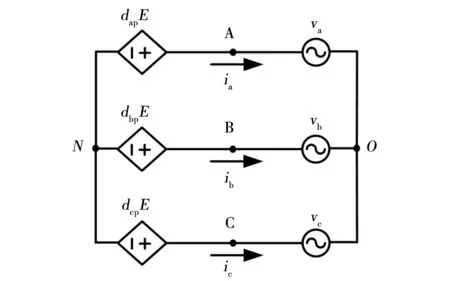
图4 开关周期平均模型Fig.4 Switching-cycle average model
求解式(15),需将三相耦合的逆变器拓扑进一步解耦。如图5所示,根据每个相电压的过零点时刻,将一个工频周期划分为6个区域[12]。每个区域内,与其他两相电压反向的相电压占主导地位,该相电压所对应的桥臂在整个区域内一直保持导通或者关断,另外两相电压所对应的桥臂则根据开关占空比进行切换。根据这一规则可将三相逆变器解耦为等效双路buck变换器。
以区域Ⅰ(0°~60°)为例,va和vc为正,vb为负,则b相电压占主导,开关Sbn一直导通,dbp=0,开关Sap与Scp则根据开关占空比进行切换,等效电路如图6所示。假定系统对称,则:va+vb+vc=0,将dbp=0代入,式(15)可化简为
(16)
区域Ⅲ和Ⅴ与之等价。区域Ⅱ、Ⅳ和Ⅵ的占空比函数可化简为
(17)

图5 区域划分示意图Fig.5 Six regions in each line cycle

图6 区域Ⅰ的等效双buck变换器电路Fig.6 Equivalent dual-buck converters in region Ⅰ
根据以上分析,各区域内的逻辑脉冲分配规则如表1所示。 在每个区域内,三相逆变器均有一相桥臂没有发生任何切换。图7给出了各区域内开关占空比示意图。在一个开关周期内,开关切换次数为4次,从当前开关周期向下一开关周期切换时,引入4次开关切换。经计算,与三相标准七段式SVPWM相比,该算法能够减小约33%的开关切换次数。

表1 各区域内的脉冲时间分配规则表Table 1 Distribution rule of duty cycle in each sector

图7 各桥臂开关Tip的占空比示意图Fig.7 Diagram of duty ratio for power switch Tip in each phase
综上所述,图8给出了三相逆变器的单周期控制框图。其主要包括:电压选择电路、区域判断电路、电压积分复位电路、电流解耦与占空比计算电路和脉冲时间分配电路。

图8 三相逆变器的单周期控制器Fig.8 One-cycle controller core for three-phase inverters
3 实验验证
为验证单周期控制算法对拍频抑制的有效性和正确性,借助OP5600/RT-LAB、TMS320F2812以及单周期硬件板卡进行了硬件在回路实验测试。单周期硬件板卡主要包括:可复位的积分电路、比较电路、RS触发电路、取反电路等。运算放大器为LF356N,R-S触发器为74LS279,积分器的复位开关为单刀单掷开关ADG1401。
在OP5600/RT-LAB半实物实验平台上模拟牵引逆变器-电机系统主电路, DSP和单周期硬件板卡为逆变器-电机系统控制器。在基于单周期控制的逆变器-电机系统中,牵引电机间接矢量控制算法由TMS320F2812实现;单周期控制算法由单周期硬件板卡实现。与之对比的基于SVPWM算法的牵引逆变器-电机系统,其牵引电机间接矢量控制算法和SVPWM算法均由TMS320F2812实现。
异步电机参数如表2所示,负载转矩TL=500 N·m,逆变器直流母线电压Udc=3 000 V、纹波峰-峰值为400 V、频率为100 Hz,等效开关频率为1 kHz。

表2 牵引电机参数Table 2 Induction motor parameters
在相同的参数下,分别得到基于单周期控制和SVPWM算法的牵引电机定子电流波形和转矩波形,并对牵引电机定子电流波形进行快速傅里叶变换(fast fourier transformation,FFT)。
逆变器调制波频率为94 Hz时,电机定子电流波形如图9所示,其FFT分析如图10所示,电机转矩波形如图11所示。其中,图9(a)、图10(a)和图11(a)分别是基于单周期控制算法的实验波形,图9(b)、图10(b)和图11(b)分别是基于SVPWM算法的实验波形。从实验波形可得,电机定子电流低频振荡频率为6 Hz,与1.3节理论分析一致。采用单周期控制算法后,电机定子电流和转矩脉动均有明显下降,由图10可得,采用单周期控制算法后,电机定子电流6 Hz处的谐波含量由SVPWM算法下的52.5%降为22.8%,拍频抑制效果明显。

图9 定子电流的半实物实验波形(fs=94 Hz)Fig.9 HIL experimental waveforms of stator current (fs=94 Hz)
为了进一步验证单周期控制算法在各频率点拍频抑制的有效性,开展了定子频率为105 Hz时的半实物实验测试。此时定子电流波形如图12所示,其FFT分析如图13所示,电机转矩波形如图14所示。其中,图12(a)、图13(a)和图14(a)分别是基于单周期控制算法的实验波形,图12(b)、图13(b)和图14(b)分别是基于SVPWM算法的实验波形。从实验波形可得,电机定子电流低频振荡频率为5 Hz,与1.3节理论分析一致。采用单周期控制算法后,电机定子电流和转矩脉动均有明显下降,由图14可得,采用单周期控制算法后,电机定子电流在5 Hz处的谐波含量由SVPWM算法下的67%降为25%,有效地抑制了拍频现象。

图10 电机定子电流FFT分析(fs=94 Hz)Fig.10 FFTanalysis of stator currents(fs=94 Hz)

图11 输出转矩的半实物实验波形(fs=94 Hz)Fig.11 HIL experimental waveform of the output torque(fs=94 Hz)
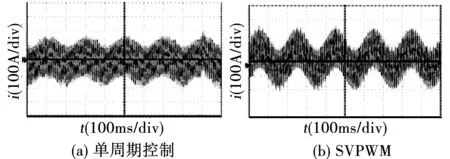
图12 定子电流的半实物实验波形(fs=105 Hz)Fig.12 HIL experimental waveforms of stator current (fs=105 Hz)
对比两组实验结果,发现第二组实验中,两种控制算法的电机定子电流谐波和转矩脉动较第一组均有所增加,这是由于开关频率不变而调制波频率增高,一个调制周期内的开关切换次数减少所导致的。
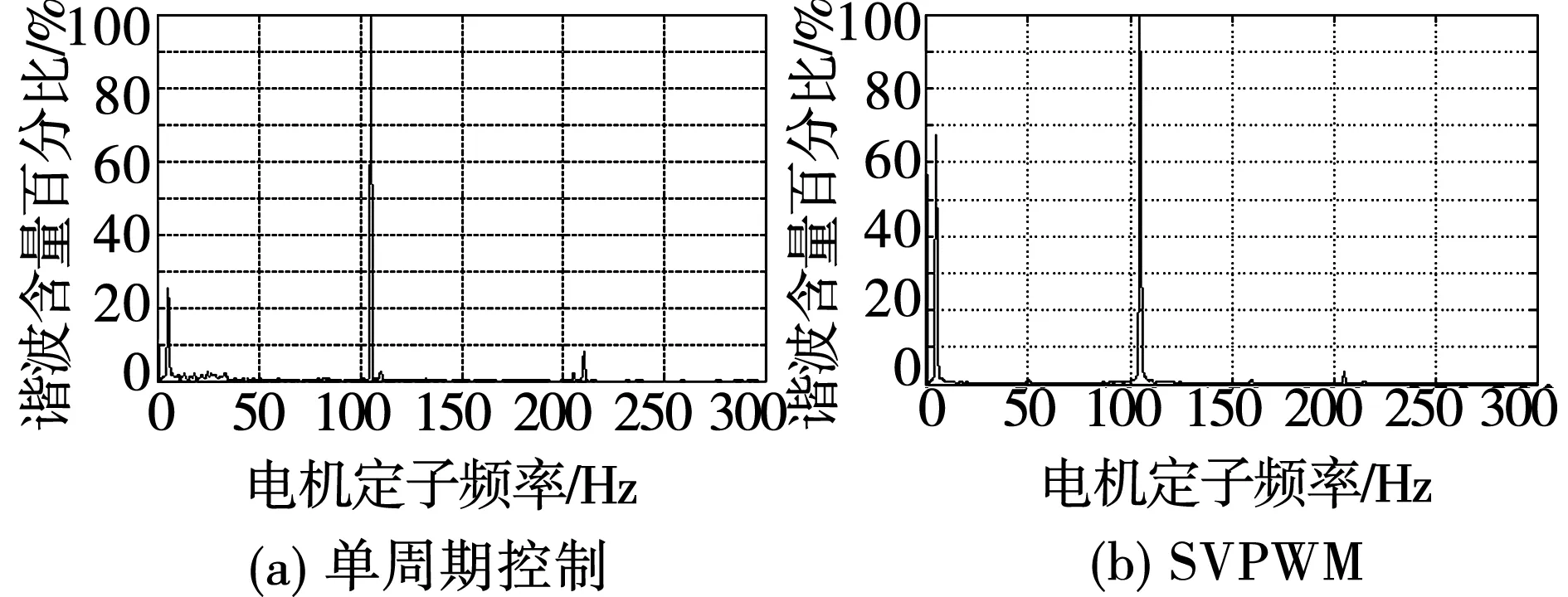
图13 电机定子电流FFT分析(fs=105 Hz)Fig.13 FFT analysis of stator currents(fs=105 Hz)
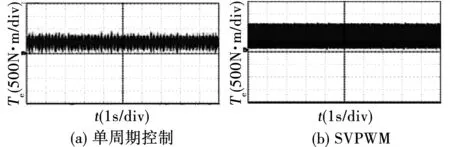
图14 输出转矩的半实物实验波形(fs=105 Hz)Fig.14 HIL experimental waveforms of the output torque(fs=105 Hz)
两组实验均表明,整流器直流侧电压2倍电网频率纹波激发电机拍频时,单周期控制算法能够有效抑制定子电流谐波和转矩脉动。两组实验均验证了单周期控制算法的有效性。
4 结 论
针对直流侧无LC滤波器的电力牵引传动系统,首先从理论上分析了其直流侧电压2倍电网频率脉动将会引起牵引电机定子电流低次谐波增大和转矩脉动增大,即牵引电机拍频现象。然后,为了实现牵引逆变器-电机系统的无拍频控制,本文提出了将单周期控制算法作为牵引逆变器的调制方案,并结合牵引电机间接矢量控制,可实现输入电压脉动时牵引逆变器的输出仍能满足伏秒平衡。最后,通过硬件在回路的半实物实验对比研究,验证了该单周期控制算法能有效地抑制拍频现象。
[1] 苟斌,冯晓云,宋文胜,等.牵引变流器-电机拍频现象及其抑制方法[J].中国电机工程学报,2013,33(9): 55-63. GOU Bin,FENG Xiaoyun,SONG Wensheng,et al.Analysis and suppression of beat phenomenon for railway traction converters and motors[J].Proceedings of the CSEE,2013,33 (9): 55-63.
[2] SONG Wensheng,SMEDLEY K,FENG Xiaoyun,et al.One-cycle control of induction machine traction drive for high speed railway part I: multi-pulse width modulation[C]//36th Annual Conference of the IEEE Industrial Electronics Society,Glendale:IECON.2010: 2346-2351.
[3] SONG Wensheng,SMEDLEY K,FENG Xiaoyun.One-cycle control of induction machine traction drive for high speed railway part II: square wave modulation region[J].Conference Proceedings of the IEEE Applied Power Electronics Conference and Exposition-APEC,2011: 1003-1009.
[4] 董侃,刁利军,唐敬,等.基于频域分析的无拍频控制策略离散化方法[J].电工技术学报,2015,30(10): 283-291. DONG Kan,DIAO Lijun,TANG Jing,et al.Discrete method research for beat-less control strategy based on frenquency domain analysis[J].Transactions of China Electro Technical Society,2015,30(10): 283-291.
[5] 欧阳晖,张凯,张鹏举,等.牵引变流器直流母线电压脉动下的无拍频电流控制方法[J].电工技术学报,2011,26(8): 14-23. OUYANG Hui,ZHANG Kai,ZHANG Pengju,et al.Repetitive prediction of fluctuating DC link voltage for traction drives[J].Transactions of China Electro Technical Society,2011,26(8): 14-23.
[6] KLIMA J,CHOMAT M,SCHREIER L.Analytical closed-form investigation of pwm inverter induction motor drive performance under dc bus voltage pulsation[J].IET Electric Power Applications,2008,2(6):341-352.
[7] 冯晓云.电力牵引交流传动及其控制系统[M].北京: 高等教育出版社,2009.
[8] 葛兴来,冯晓云,韩坤,等.三电平牵引变流器无拍频控制的硬件在回路实时仿真[J].电工技术学报,2014,29(8): 204-210. GE Xinglai,FENG Xiaoyun,HAN Kun,et al.Hardware-in-the-loop application of beat-less control scheme for three-level traction inverter system[J].Transactions of China Electro Technical Society,2014,29(8): 204-210.
[9] 葛兴来,冯晓云.三电平逆变器无拍频控制策略研究[J].铁道学报,2010,32(6): 125-130. GE Xinglai,FENG Xiaoyun.Research on beat-less control technology in three level inverter[J].Jouranl of the China Railway Society,2010,32(6): 125-130.
[10] NAKATA K,NAKAMACHI T,NAKAMURA K.A beatless control of inverter-induction motor system driven by a rippled dc power source[J].Electrical Engineering in Japan,1989,109(5):122-131.
[11] KIMURA A.Frequency domain analysis of beatless control method for converter-inverter driving systems applied to ac electric cars[J].Electrical Engineering in Japan,2011,174(4):51-57.
[12] LIN Fei,YANG Zhongping.Analysis of the rippled dc voltage of traction drive systems for high-speed train[C]//3rd International Conference on Power Electronics and Intelligent Transportation System,Shenzhen: PEITS.2010,6: 412-415.
[13] CHEN Y,SMEDLEY K M.One-cycle-controlled three-phase grid-connected inverters and their parallel operation[J].IEEE Transactions on Industry Applications,2008,44(2): 663-671.
[14] CHEN Y,SMEDLEY K.Three-phase boost-type grid-connected[J].IEEE Transactions on Power Electronics,2008,23(5): 2301-2309.
(编辑:刘琳琳)
One-cycle control for beat-less frequency control application of traction drive system
SONG Wen-sheng, SUN Xiao, JIANG Cai
(School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
The single-phase AC power supply source in electrified railway and characteristics of the grid-tied converter topology in train leads to beat frequency phenomenon of motor.Twice line-frequency ripple of DC-link voltage in traction converters was analyzed.And the reason why the more severe beat-frequency phenomenon happens when the fundamental frequency of the output phase-voltage of inverter is close to twice the line-frequency was described.And then,combining indirect filed-oriented control scheme,one cycle control was carried out to achieve beat-less frequency control for the traction inverter-motor system without LC filter in the DC-link,which satisfies the principle of voltage-second balancing even when the DC-link voltage is fluctuating.Finally,the hardware-in-the-loop(HIL) platform with OP5600/RT-LAB real-time simulator and DSP TMS320F2812 Controller was developed to compare with the traditional space vector pulse-width modulation strategy and one cycle control.The HIL experimental results verify that OCC scheme can effectively suppress the beat frequency phenomenon.
traction inverter; traction motor; beat frequency phenomenon; one cycle control; space vector pulse width modulation
2015-11-08
国家自然科学基金(51277153,51577160)
宋文胜(1985—),男,博士,讲师,研究方向为电力牵引交流传动及其控制; 孙 晓(1991—),女,硕士研究生,研究方向为电力牵引交流传动及其控制; 江 才(1989—),男,硕士,研究方向为电力牵引交流传动及其控制。
孙 晓
10.15938/j.emc.2017.03.002
TM 46
A
1007-449X(2017)03-0010-07