基于UG偏曲轴少齿差行星减速器内齿轮副参数化建模的研究
2017-03-25李东辉徐强陈超超
李东辉,徐强,陈超超
(合肥学院机械工程系,安徽合肥230601)
基于UG偏曲轴少齿差行星减速器内齿轮副参数化建模的研究
李东辉,徐强,陈超超
(合肥学院机械工程系,安徽合肥230601)
为了创建偏曲轴少齿差行星减速器内齿轮副的变参装配模型,分析了内齿轮副渐开线任一点的包角与压力角及展角的关系。引进UG的内部参数t,建立了齿顶圆与齿根圆之间的渐开线直角坐标方程,并分别建立了外齿轮与内齿轮渐开线基本表达式。以此为契机,分别进行了内外齿轮及齿轮副装配的参数建模。结果表明,该装配模型在满足一定条件下,随着齿轮的参数变化而变化,为今后对该机构优化设计、运动仿真打下坚实的基础。
行星减速器;渐开线;压力角;参数
偏曲轴少齿差行星减速器具有结构紧凑、降速比大、体积小、传动精度高等特点[1]。为了便于对该减速器优化设计,需要对该减速器进行三维参数化建模。目前,很多文献对直齿或斜齿轮进行了参数化建模,但对变位的内齿轮副参数化建模研究较少[2-3]。本文通过UG6.0这个软件工具,对偏曲轴少齿差内齿轮副进行参数化建模,为进一步深入研究该减速器,打下坚实的基础。
1 偏曲轴少齿差行星减速器内齿轮副限制条件
偏曲轴少齿差行星减速器核心部件是少齿差内齿轮副,外齿行星齿轮做平动,内齿轮做大传动比减速转动。
对于少齿差内啮合齿轮副,为了保证内齿轮副连续传动,必须保证传动重合度ε大于重合度最小许用值[ε];为了保证少齿差不产生重叠干涉,必须Gs>0;为保证内齿轮齿廓为渐开线齿廓,内齿轮的齿顶圆必须大于基圆;同时,内外齿轮的齿顶具有足够的厚度,内外齿轮的齿根不发生根切,插齿加工的内齿轮不发生顶切等。具体参数计算值通过查文献[4]得到。
2 渐开线少齿差内齿轮副参数化建模
2.1 参数化建模原理
三维软件参数化设计实质通过改变设计参数,从而改变零件的尺寸及形状。对于偏曲轴少齿差行星减速器内齿轮副的齿轮参数为:模数m、齿数Z、变位系数X、齿顶高系数则内、外齿轮齿根圆及齿顶圆直径公式可参考文献[5]。
在UG中,渐开线齿廓由“规律曲线”来实现。使用规律曲线有两点要求:(1)建立渐开线齿廓直角坐标方程式;(2)这些方程式所使用的变量t必须是位于[0,1]之间的变量[6]。
设基圆半径rb,渐开线直角坐标方程式为[7]

式中βk为渐开线上点K的滚角。
为了实现变参控制的齿廓曲线,必须得到齿顶圆与齿根圆之间的渐开线,即必须求出齿根圆上的滚角βf,齿顶圆上的滚角βa.
设渐开线与任一半径rk的圆的交点为K,如图1所示,该交点K的渐开线展角θk,压力角为αk,则该点的滚角为:

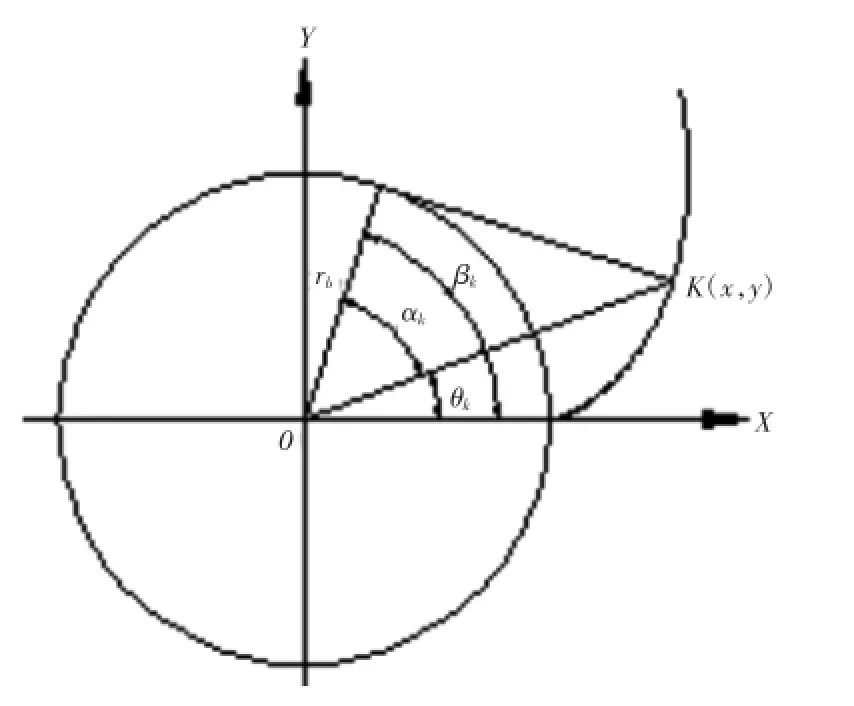
图1 渐开线展角、压力角与滚角的关系
设t为UG的内部变量,其变化范围为[0,1]之间,齿顶圆与齿根圆之间渐开线的滚角为:

则齿顶圆与齿根圆之间的渐开线直角坐标方程为:

2.2 齿廓的参数建模
(1)创建外齿轮渐开线表达式由内齿轮副基本参数计算出外齿轮的基圆直径db1,齿顶圆直径da1,齿根圆直径df1,其渐开线表达式如下:
alpha1=arccos(db1/da1)//alpha1为齿轮1渐开线与齿顶圆交点a1压力角,单位为角度
alphra1=Radians(alpha1)//alphra1为alpha1弧度值
ceta1=tan(alpha1)-alphra1//ceta1为基圆与齿顶圆之间渐开线段对应的展角,单位应填恒定
cetda1=deg(ceta1)//cetda1为ceta1角度值
Ba1=cetda1+alpha1//Ba1为轮1齿顶圆上渐开线点a对应滚角的角度值
齿根圆的滚角Bf1与齿顶圆的滚角计算类似,这里不再详述。
t=1//t为UG内部系统变量,t=0-1
Bt1=Bf1+(Ba1-Bf1)*t//Bt1为齿顶圆与齿根圆之间的渐开线滚角的角度值
Btr1=Radians(Bt1)Btr1为Bt1弧度值,单位为恒定
xt1=rb1*cos(Bt1)+rb1*Btr1*sin(Bt1)
yt1=rb1*cos(Bt1)-rb1*Btr1*cos(Bt1)
(2)选择“草图>任务环境中的草图”在XOY平面分别创建分度圆、齿根圆、齿顶圆。
(3)创建第一条渐开线。由于之前已经建立完成渐开线表达式,因此,便可以直接选择“插入>曲线>规律曲线”,在XC-YC坐标平面内生成第一条渐开线线段S1.
(4)创建外齿廓对称基准平面。任意画一条线段l1,选择“约束”命令使其一个端点与原点重合,使另一个端点既在分度圆上又在渐开线上,创建一条与l1的夹角为90/Z1的线段l2,退出草图环境,创建一条与ZC轴重合长度任意的线段l3.通过“基准平面”在“类型”中选择“两条直线”创建对称基准平面。
(5)创建对称渐开线。通过“插入>关联复制>镜像特征”便可得到所需的第二条渐开线。
(6)完成轮齿绘制。选择“拉伸”在命令栏选择“单条曲线”、“在相交处停止”,选中所需要的线段,拉伸长度为齿厚B.利用“对特征形成图样”命令,其中“数量”为齿数Z1,“节距角”为360°/Z1,便可得到齿数为Z1的齿轮齿形,然后将齿根圆拉伸长度为齿厚B,生成的齿轮如图2所示。
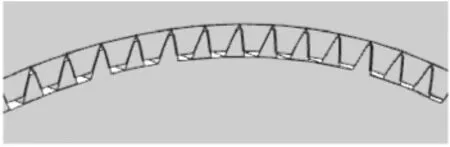
图2 内齿轮副装配参数化装配模型
内齿廓的齿槽相当于外齿轮的齿廓,内齿轮齿廓相当于外齿轮的齿槽,因而内齿廓参数建模基本思路是相似的,这里不再详述。
2.3 内齿轮副装配模型
新建一个空的装配文件,导入内齿轮建模时的表达式即所有表达式,这样才能实现变参。
(1)进入草图环境,创建两条平行线且距离为实际中心距a’.
(2)“添加组件”先添加内齿轮,通过“装配约束>接触对其>自动判断轴中心”使内齿轮中心与一条线段重合,然后添加外齿轮使其中心与另一条线段重合,选择“接触”使内齿轮齿廓与外齿轮齿廓接触,选择“对齐”使两齿轮的一个端面在同一平面上,如图2所示。
图2的外齿轮的参数为:m=2,Z1=126,X1=0.6;内齿轮的参数为:m=2,Z2=128,X2=0.823.图3的内、外齿轮参数为:m=1.5,Z1=110,X1=0.085,Z2=112,X2=0.398 8.从图3可看出,在满足一定条件下,若改变齿轮的齿数、模数、变位系数等参数,整个内齿轮的装配模型尺寸也随之改变。
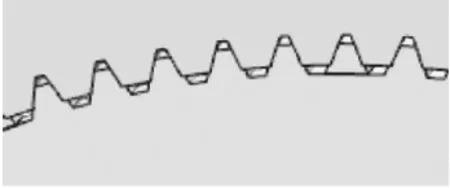
图3 参数变化后的内齿轮副装配模型
3 结论
通过上述内齿轮副参数化建模研究,得到如下结论:
(1)分析渐开线任一点K,其滚角与压力角以及渐开线展角之间关系,引进UG的内部参数t,建立了齿顶圆与齿根圆之间渐开线滚角公式,并创建渐开线直角坐标方程。
(2)分别建立内外齿轮渐开线基本表达式,并分别进行了内外齿轮的参数建模,且建立了内齿轮副的装配模型。结果表明,该装配模型,在满足一定条件下,随着齿轮参数变化而变化。
[1]徐强,许泽银,许道益.基于Matlab偏曲轴少齿差行星减速器最大承载能力的研究[J].机械强度,2014,36(2):222-227.
[2]王书贤,汪云,邓利军,等.基于UG的渐开线斜齿圆柱齿轮参数化设计[J].机械传动,2011,35(5):36-38.
[3]李玉龙.泵用斜齿轮副精确模型UG下的快速实现[J].中国农机化学报,2013,34(5):171-174.
[4]XU Qiang,XU QiSheng,XU DaoYi.Study on calculations of geometric dimensions and modification coefficients of plane tary gear reducer of less tooth difference with biasing crankshaft based on MATLAB[J].Advanced Materrial Research,2012,644(11):298-303.
[5]张黎骅,郑平.新编机械设计手册[M].北京:人民邮电出版社,2008:376-380.
[6]李玉龙,刘焜,鲍仲辅.基于渐开线齿轮展成法的参数化精确建模[J].现代制造工程,2006(9):70-72.
[7]白剑峰,贺靠团.基于UG的渐开线圆柱齿轮参数化设计[J].现代制造工程,2006(2):118-121.
Study on UG Axis Deviation of Planetary Reducer in Parametric Gear Modeling Based on Small Tooth Difference
LI Dong-hui,XU Qiang,CHENG Chao-chao
(Department of Mechanical Engineering,Hefei University,Hefei Anhui 230601,China)
In order to create the assembly modeling of internal gear pairs of planetary gear reducer of less tooth difference with biasing crankshaft on variable parameters,the relationships were analyzed among the wrap angle,the pressure angle and the turning angle at any point on the involute curve of the internal gear pairs,the inside parameter t in UG was introduced,the equations of rectangular coordinates of the involute curve between the addendum circle and the dedendum circle were built,the parametric models of the external and internal gears were built,at the same time,the assembly modeling of the internal gear pairs was created.The result shows that the assembly modeling changes with the parameters of internal gear pairs under some conditions,and builds a steady basis for the optimizing design and motion simulation of the mechanism in the future.
planetary gear reducer;Involute curve;pressure angle;parameters
TH132.413
:A
:1672-545X(2017)01-0026-03
2016-10-18
1.安徽省教育厅自然科学重点项目(kJ2012A247)新型工业机器人减速器的研制;2.合肥学院人才科研基金项目(15RC10)新型变齿厚RV减速器最大承载能力及机械效率的优化研究
李东辉(1994-),男,安徽宿州人,本科,研究方向:机械设计制造;徐强(1962-),男,安徽合肥人,硕士,教授,研究方向:研究方向:机械设计制造。