改进的Active Bat室内超声波定位方法
2017-03-23周先赞衷卫声
熊 剑,周先赞,郭 杭,衷卫声
(1.南昌大学信息工程学院,江西 南昌 330031;2.南昌大学空间科学与技术研究院,江西 南昌 330031)
改进的Active Bat室内超声波定位方法
熊 剑1,周先赞1,郭 杭2,衷卫声1
(1.南昌大学信息工程学院,江西 南昌 330031;2.南昌大学空间科学与技术研究院,江西 南昌 330031)
针对Active Bat室内超声波位方法中定位精度受环境温度、硬件延时误差、时间同步误差等的影响,提出了改进的Active Bat室内超声波定位方法。该方法在Active Bat室内超声波定位系统结构基础上设立一个参考节点,通过参考节点定位坐标与实际位置坐标获取位置误差修正数,修正定位终端定位误差,以提高定位精度。室内环境下进行实验数据采集、解算、对比分析,实验验证表明,常规的Active Bat室内超声波定位定位平均误差为6.93 cm;该方法定位平均误差为1.86 cm。该方法可以有效提高室内定位精度,定位精度提高了接近73.16%。
Active Bat;超声波定位;误差修正
0 引言
GPS接收机[1-2]在室内工作时,信号受到建筑物的影响而大大衰减,无法满足人们对活动频繁的室内定位导航[3]。因此,如何解决室内的高精度可靠定位成为许多专家学者们研究的重点。常用的室内定位方法有红外技术、Zigbee技术、无线蓝牙技术、超宽带技术以及超声波技术[4-5]。在众多室内定位技术中,超声波定位技术作为一种非接触式的检测方法,有着方向性好、纵向分辨率高、对色彩、光照度不敏感等优势[6-8],在定位技术中有广泛应用。
典型的超声波定位系统有Cricket定位系统[9-10]和ActiveBat定位系统[11-12]。MIT研发的Cricket超声波定位系统基于超声波技术和射频技术,其定位精度为10cm左右;AT&TLaboratoriesCambridge研发的ActiveBat超声波定位系统将超声波信号作为载体,采用TOA算法进行定位,其定位精度为9cm左右。由于受到环境温度、硬件延时误差、时间同步等因素的影响,Cricket定位系统和ActiveBat定位系统定位精度不是很高,如果克服了这些因素的影响可以有效提高超声波定位精度。在常规超声波定位方法基础上胡跃辉、MedinaC等[13-14]建立了声速与温度之间关系模型以提高定位精度,由于声速与温度之间模型本身存在一定的误差,声速的影响不能完全消除;M.M.Saad、J.R.Gonzale等人[15]将基于到达角度定位方法(AOA)用于室内超声波定位,其定位精度可以达到9.5cm之内,该方法很好地解决了声速、时间同步等因素的影响,但是未能解决硬件延时问题。本文针对上述问题,提出了改进的ActiveBat室内超声波定位方法。
1 Active Bat超声波定位方法
如图1所示为ActiveBat超声波定位系统构成图。其主要由中心站、信标节点和定位终端三部分组成,其具体定位步骤为:
1)中心站发射射频信号,作为时间同步信号;
2)定位终端接收到中心站发射的时间同步信号后,启动发射超声波信号;
3)安装在室内固定位置的信标节点接收射频信号和超声波信号之间的时间差,通过时间差得到定位终端到各个信标节点的距离信息。
当得到3个或3个以上的距离信息时,可以根据三边定位等算法确定定位终端三维坐标信息。
ActiveBat超声波定位系统整体定位精度较高、结构简单,能以95%的概率使得定位误差在9cm之内。但是超声波定位易受环境温度、硬件延时误差、时间同步误差等因素的影响,使得定位误差较大。针对这一问题,提出了改进的ActiveBat室内超声波定位方法:在ActiveBat超声波定位系统构成基础上增加参考节点,通过参考节点定位坐标与标准坐标对比得到误差修正值,通过此修正值修正定位终端位置信息,得到更高精度的三维定位坐标。
2 改进的Active Bat定位方法
2.1 超声波定位误差影响因素
超声波定位以其定位精度高的特点而被广泛应用,但是其也存在一定的误差,影响超声波定位精度的因素主要有:
1)环境温度影响
空气中超声波信号传播速度与环境温度存在一定的关系,如式(1)所示:
(1)
式(1)中,C为空气中超声波信号传播速度,R为空气常数,λ为气压热容和定容热容比值,M为气体分子量,T为环境绝对温度。由此可以看出,超声波信号在空气中传播速度受环境温度等因素的影响。超声波信号传播速度C与室内温度T之间的关系如表1所示。而超声波定位方法通常采用TOA/TDOA测距,然后通过三球相交得到位置信息,由于声速影响测量距离,所以会影响到超声波定位精度。

表1 C与T关系表
2)硬件延时误差
超声波定位系统主要由信标节点、目标节点、中心站三部分组成,三部分通常由赢点电路设计制板而成,造成各个硬件设备上的各种芯片时延不同而影响超声波定位精度。
3)时间同步误差
由于射频信号(RF)在空气中传播速度很快,在室内环境下传播时间可以忽略不计,因此室内超声波定位方法通常采用RF信号进行时间同步。但是,即使RF传播时间很短,但也存在一定的时间误差以致影响超声波定位精度。
2.2 改进方法的提出
由2.1节可知,室内超声波定位误差主要由环境温度、硬件延时误差、时间同步误差等因素引起,假设其具体误差公式如下:
δ=δt+δh+δs+δe
(2)
式(2)中δt,δh,δs,δe分别为由环境温度、硬件延时误差、时间同步误差以及其他误差引起的超声波定位误差。这些误差均可看成是系统误差,假设室内环境下,由这些系统误差造成的多次超声波定位误差在x,y,z三轴上具有一定的倾向性,即投影到各个坐标轴上的定位误差值是在一个常量上下徘徊,采用常量对该误差进行修正即可减小定位误差;由于常量具体值无法确定,采用其中一个信标节点在各个坐标轴上的定位误差作为常量进行修正即可减少其他信标节点在各个坐标轴上的定位误差,从而减小定位综合误差。室内环境下对所提出的假设进行了验证分析,实验数据如表2所示,从表中可以看出,定位终端在各个轴上的误差具有一定的倾向性,假设成立。
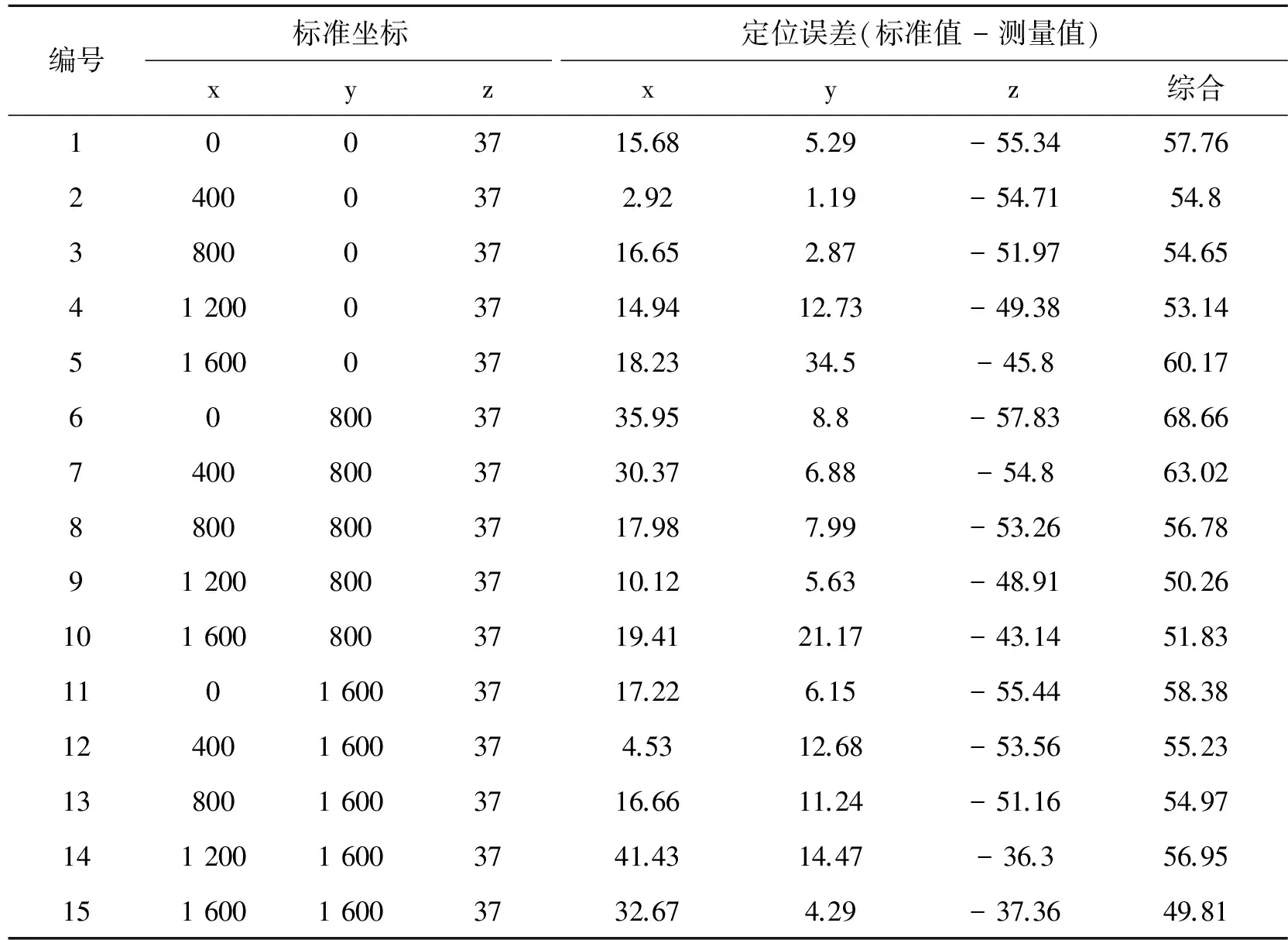
表2 实验数据表
注:表2中所有测量数据单位均为毫米(mm);四个信标节点布设在室内屋顶上,其中信标1坐标为(0,0,3 925)、信标2坐标为(1 600,0,0)、信标3坐标为(1 600,1 600,3 925)、信标1坐标为(0,1 600,3 925)。
表2中综合误差Δ即:
(3)
结合上述假设提出了改进的ActiveBat室内超声波定位方法:在ActiveBat定位系统中增加参考节点,以提取定位误差修正量,对定位终端定位结果进行误差修正以提高定位精度。其具体实现方法如下:
(4)
根据参考站标准坐标值与测量值提取误差修正数Δ,其中:
(5)
(6)
根据前面得到的误差修正数Δ进行位置修正:
(7)
由此可知,根据参考站得到位置误差修正数,通过位置修正方法即可精确测得目标节点的三维坐标(x,y,z)。
3 实验验证与分析
3.1 系统构成与环境
如图2所示为改进的ActiveBat超声波定位方法系统构成图,在ActiveBat超声波定位系统基础上增加了参考站以进行位置修正。其中,中心站用于时间同步,信标节点用于接收超声波信号并进行测距,目标节点用于发射超声波信号,参考站用于获得误差修正数。
室内环境下对所提出的改进的ActiveBat超声波定位方法进行物理实验验证分析。公式(8)为超声波信号强度与传播距离的关系表达式。可以看出,超声波信号强度随距离的增加衰减比较快,远距离范围内不能接收到超声波信号,大范围室内环境下需布设多个信标才能保证室内范围内都可实现定位;只能在室内局部范围内验证所提出的超声波定位位置修正方法,取室内2m×2m的区域进行实验研究。为了保证在区域范围内每个位置都可以至少有三个信标节点接收到超声波信号,结合系统构成图在屋顶正方形区域的四个角落布设四个信标节点。
U=U0e-αL
(8)
根据系统构成图进行实验,实验步骤如下:中心站发射射频信号;参考站和目标节点接收到中心站发送来的时间同步信号后,分别在不同的时隙间隔发射经过超声波信号;信标节点接收到参考站及目标节点发射的超声波信号分别计算得到参考站及目标节点三维坐标信息;根据参考站标准坐标取得定位误差修正数修正目标节点位置信息,实现精确定位。
3.2 实验结果分析
布设在屋顶的四个信标节点坐标(单位:mm)分别为:信标1(0,0,3 925),信标2(2 000,0,3 925),信标3(2 000,2 000,3 925),信标4(0,2 000,3 925);取正方形区域中点为参考点坐标为:(1 000,1 000,37);通过参考点得到定位误差修正数三维坐标值为:(16.72, 4.07, -62.79);定位误差取三维综合误差;定位平均误差即所有定位误差平均值计算公式如式(9)所示。
(9)
由于实验数据量较大,本文通过曲线图描述超声波定位实验数据采集、处理得到的定位误差,如图3所示。其中实线为常规的ActiveBat超声波定位误差,虚线为所提出的改进的ActiveBat室内超声波定位误差结果。对比得出:该方法可以有效提高室内定位精度。对所采集到的多组定位误差数据取平均值,通过计算得出:采用ActiveBat原理超声波定位平均误差为6.93cm;采用改进的ActiveBat超声波定位方法定位平均误差减小到1.86cm,精度提高了接近73.16%。
4 结论
本文提出了改进的ActiveBat室内超声波定位方法。该方法在ActiveBat室内超声波定位系统结构基础上设立一个参考节点,通过参考节点定位坐标与实际位置坐标获取位置误差修正数,修正定位终端定位误差,以提高定位精度。室内环境下进行了物理实验验证分析,实验验证表明:采用改进的ActiveBat室内超声波定位方法可以有效提高室内超声波定位精度;相对常规的ActiveBat原理超声波定位方法,该方法可以将定位精度提高73.16%,使其总体定位误差保持在5cm之内,适用于高精度室内超声波定位。
[1]YunLi,AdolfFinger.ChannelModel-BasedSensingforIndoorUltrasonicLocationSystem[C]//Proceedingsofthe8thWorkshoponPositioningNavigationandCommunication2011.Germany, 2011:83-88.
[2]王尔申,范云飞,庞涛,等.GPS接收机自主完好性检测算法硬件仿真[J]. 探测与控制学报,2015,37(5):62-65.
[3]Min-SuKim,Dong-HwiLee,Kui-NamJ.Kim.Astudyonthereal-timelocationtrackingsystemsusingpassiveRFID[J].Lecturenotesinelectricalengineering, 2013,215:441-448.
[4]杨阳,肖金红,刘智,等.基于超声波的室内三维定位系统[J].吉林大学学报(信息科学版),2012,30(3):267-271.
[5]ChulYoungPark,DaeHeonPark,JangWooPark,etal.LocalizationalgorithmdesignandimplementationtoutilizationRSSIandAOAofZigbee[C]//2010 5thInternationalConferenceonTutureInformationTechnology.Piscatawovy:IEEE, 2010 : 1-4.
[6]熊剑,林舟杰,郭杭等. 基于时间调制的超声波自主实时定位系统[J]. 探测与控制学报,2016,38(2):43-52.
[7]DaiJamesB,FuQ,LeeNevilleKS.Effectofbeaconorientationonbeaconplacementstrategiesintheultrasonicpositioningsystem[J].RoboticsandAutonomousSystems, 2013,61(6):648-658.
[8]SaadMM.ChrisJBleakley,SimonDobson,etal.Robusthigh-accuracyultrasonicrangemeasurementsystem[J].IEEEtransastionsoninstrumentationandmeasurement, 2011,60(4):3334-3341.
[9]GuoQingfeng,WongWaiChoong.TrackingIndoorPedestrianusingCricketIndoorLocationSystem[C]//2012IEEEInternationalConferenceonCommunicationSystems.Singapore:IEEE, 2012:453-457.
[10]WoodmanOliverJ,HarleRobertK.Concurrentschedulingintheactivebatlocationsystem[C]//2010 8thIEEEinternationalconferenceonpervasivecomputingandcommunicationsworkshops.Germany: 2010.
[11]AndyWard,AlanJones,AndyHopper.ANewLocationTechniquefortheActiveOffice[J].IEEEPersonalCommunications, 1997, 4(5):42-47.
[12]PriyanthaNB,ChakrabortyA,BalakrishnanH.TheCricketLocationSupportSystem[D].MIT:Massachusetts, 2005.
[13]胡跃辉,周康源,周平,等.一种实时3D超声定位系统的设计[J].声学技术,2012,23(1):29-32.
[14]MedinaC,SeguraJC,DelaTorreA.Ultrasoundindoorpositioningsystembasedonalow-powerwirelesssensornetworkprovidingsub-centimeteraccuracy[J].Sensors, 2013, 13(3) :3501-3526.
[15]SaadMM,BlerkleyChrisJ,BallalT,etal.High-AccuracyReference-FreeUltrasonicLocationEstimation[J].IEEETranscactionsOnInstrumentationAndMeasurment, 2012, 6(41) :1561-1570.
An Improved Active Bat Indoor Ultrasonic Positioning Method
XIONG Jian1, ZHOU Xianzan1, GUO Hang2, ZHONG Weisheng1
(1.Academy of Informaition Engineering, Nanchang University, Nanchang 330031, China; 2.Collage of Science and Technology, Nanchang University ,Nanchang, 330031, China )
In view of the influence of environment temperature, hardware delay, time synchronization and other factors on the positioning precision of active bat indoor ultrasonic positioning method, this paper proposed an improved active bat indoor ultrasonic positioning method. A reference node was set up based on the structure of active bat indoor ultrasonic positioning system, then, the position error correction was obtained through the positioning coordinate and the actual positioning coordinate of the reference node, and the positioning error of positioning terminal could be fixed to improve the positioning accuracy. The experiment of data collection, calculation, comparison and analysis were made in indoor environment, the experimental verification showed the average error of active bat indoor ultrasonic positioning method was 6.93 cm, while the average error of improved method was 1.86 cm.
active bat; ultrasonic positioning; improve; error correction
2016-09-02
国家自然科学基金项目资助(41504026);国家自然科学基金项目资助(41374039)
熊剑(1977—),男,江西抚州人,博士,讲师,研究方向:多源信息融合、非线性滤波。E-mail:xiongjian@ncu.edu.cn。
TN96
A
1008-1194(2017)01-0101-05