猴子玩具空中翻跟头运动姿态测试及初步力学计算
2017-02-06张天艺
张天艺
(湖北省水果湖高级中学高三(3)班 430071)
儿童玩具启发智力、带来快乐,一些玩具中还蕴含着深奥的力学原理,比如:猴子起跳360°翻跟斗的玩具,当拧紧发条放在桌面,猴子就起跳并后空翻,十分有趣.但由于一个跟斗持续时间不到100 ms,眨眼即过,无法看清运动细节,也因而无法明晰的探讨猴子的详细运动状态与力学原理,本文利用高速摄像机1/3000 sec拍摄速度对玩具猴起跳翻跟斗全过程进行了跟拍,获得了猴子起跳准备阶段、起跳翻跟斗、落地平衡等三个运动阶段各时刻的运动姿态,计算出了猴子起跳时的初始速度和初始角速度,为翻跟斗猴子玩具的后续详细力学计算与分析打下了一定基础.
一、猴子各运动阶段运动姿态拍摄
翻跟斗玩具猴从外观来看可分成三部分:①身体、②脚掌、③尾巴.在身体内安装有一套传动机构,包括:发条盒、凸轮及弹簧.当拍摄准备工作就绪后,手拧玩具猴发条数圈,将猴子放置于桌面,随着发条的释放,猴子开始完成各种动作.整个过程拍摄照片926幅,容量2.94GB.
1.猴子起跳准备阶段
通过剪辑,挑选出猴子起跳前的几个特征运动姿态如图1所示,由图可见,犹如人在起跳前身体必须下蹲一样,可观察到随着发条的释放,直立猴的身体缓慢前倾,同时脚后跟缓慢抬起(此过程中,猴子体内的弹簧被拉长),当脚掌前倾到13°时为起跳前临界状态,此时猴子仅脚掌前端与支承面接触,完成起跳前身体姿态的调整,整个过程耗时72 ms.

2.猴子起跳并360°后空翻过程的运动姿态
当猴子脚掌前倾到13°时,此时猴子突然腾空上跳,且身体随之后仰,开始后空翻动作.
(1)猴子质心运动特点
如果将猴子360°后空翻过程建立直角坐标系,每45°方向取一只猴,共8只猴,叠放在一个直角坐标系中,得到图2.由图可见,猴子质心在垂直方向发生位移,即猴子翻完跟头落于原地.

(2)猴子后空翻的运动姿态
把直角坐标系水平轴变为时间轴,将8个猴排于一个坐标轴如图3所示.

猴子后空翻典型过程参数摘录如表1.
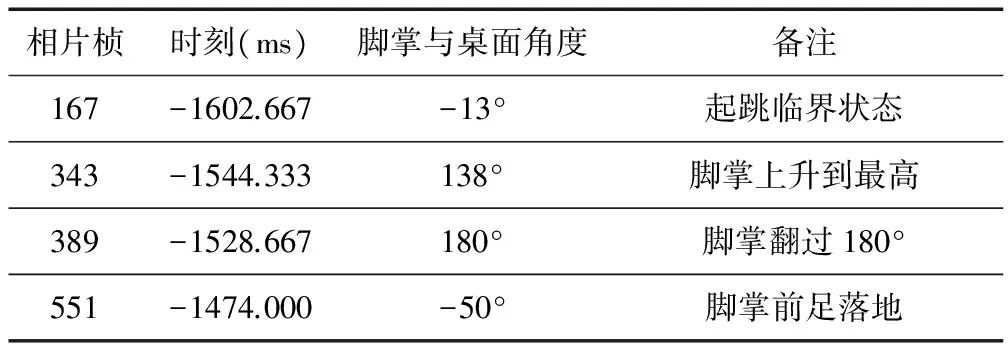
表1 猴子后空翻典型运动参数
3.猴子落地站稳运动姿态
猴子落地会受到冲击,经过一定平衡措施方能静止站立并不致摔倒.其平衡站稳过程的主要运动姿态见图4、图5.

由图可见,猴子落地平衡站稳的诀窍在尾巴的“小凸点”与脚掌的综合作用,落地瞬间脚掌前端受桌面的反作用力作用,猴子转为后仰,后仰到20°,尾巴“小凸点”作用到桌面,于是猴子又前倾,前倾15°,脚掌后端也接触到桌面,于是受到3点支撑,猴子最终直立站稳.
二、猴子后空翻力学机理初探
为了说明该玩具的力学机理,将猴子简化为如图6所示的简化图,即包括:猴身、脚掌,弹簧,猴身与后脚间的关节简化为一个铰.


式中,M为输入的力矩, 为发条转过的角度.

式中,k、x分别为弹簧的刚度系数与伸长量.
(3)当猴身前倾到一个确定的角度,传动机构中的凸轮会脱钩,猴身不再前倾,而是在弹簧的拉力作用下向后转动,从而使作用在A点的力F变大.从凸轮脱钩到弹簧完全松弛下来,会经历一段很短的时间.当F的数值大于猴子的重量的时候,就会产生一个向上的加速度,这个加速度就会使猴子产生向上跳起初速度;而力F对猴子的质心有个逆时针转向的外力矩,该外力矩就会产生一个逆时针的角加速度,这个角加速度会使猴子产生逆时针的初角速度.因此,猴子在向上跳起的同时还在转动(即翻跟斗).
(4)起跳后的猴子在重力的作用下会下落到桌面,设计合理的相关参数,可以使猴子在空中刚好翻身360度.
三、猴子运动的测量分析及弹簧刚度系数的确定
本文通过高速摄像技术,获得猴子起跳翻跟斗的全过程照片,通过相关的力学理论得到猴子起跳时的初速度及初加速度,反推出弹簧的相关参数.
通过对摄像视频分析,猴子起跳到达最高点用时t=65.167 ms,因此,猴子的达到的高度为

可知,猴子玩具的质量为M=12.1 g,对质心的转动惯量为J=3.36×10-6kg·m2.因此,刚起跳时猴子具有的动能为

弹簧伸长量为x=5 mm,则弹簧的刚度系数k=5.0975×102N/m.
本文利用高速摄像技术对猴子玩具起跳后翻跟斗的过程进行了分析,首先获得了猴子起跳后各时刻在空中的姿态;然后,获得了猴子到达最高点需要的时间,再根据相关的力学理论,推算出了猴子起跳时的初始速度和初始角速度;最后,根据能量守恒定律得到了参考文献[1]中没有提供的弹簧刚度系数.
参考文献:
[1] 王永,田燕萍,庄表中. 猴子玩具跳起360°翻跟斗能站稳—重要力学参数的优化及测试[J],力学与实践,2012,34(1):120-121.