基于导纳控制的膝关节外骨骼摆动控制研究
2017-01-10韩亚丽许有熊高海涛朱松青时煜
韩亚丽 许有熊 高海涛 朱松青 时煜
基于导纳控制的膝关节外骨骼摆动控制研究
韩亚丽1许有熊1高海涛1朱松青1时煜1
针对膝关节外骨骼机械腿运动过程中对操作者的运动跟随问题,提出了一种基于导纳原理的等效惯量补偿控制方法.设计导纳控制器将外骨骼与操作者间的交互力矩转化为期望的运动轨迹;通过低通滤波加速度与惯量增益的乘积形成的闭环反馈实现等效惯量补偿;结合腿部肌肉表面肌电信号进行人体摆腿运动换向的预判,实施膝关节外骨骼机械腿的摆动控制,实验结果表明,膝关节外骨骼与受试者之间的关节角度相对误差为±12%,膝关节外骨骼机械腿对受试者的摆腿运动能实现较好的运动跟随.
膝关节外骨骼,运动跟随,导纳控制,人体运动意图识别,交互控制
DOI10.16383/j.aas.2016.c160080
外骨骼作为一种用机械力量辅助操作者的人机一体化系统,最早由美国提出了相关概念.在助残、医疗乃至军事方面,外骨骼能够提供给人体极大的帮助,有增强操作者肢体力量、助力操作者运动等作用,成为近年来的研究热点,国内外学者对此进行了深入的研究,并分别取得了不同的成果[1−9].针对不同的外骨骼机构,研究者们提出了各自的控制方法,美国加州大学伯克利分校进行了基于液压驱动的BLEEX外骨骼下肢机器人研究[10],采用基于正反馈的灵敏度放大控制方法对下肢外骨骼进行控制,此方法不需要检测下肢外骨骼与穿戴者之间的交互力及穿戴者的运动变化,对穿戴者的影响较小,但需要建立精确的下肢外骨骼动力学模型,其控制效果受限于逆运动学模型精度的影响且抗干扰性较差.日本筑波大学进行了基于电机驱动的HAL(Hybrid assistive limb)外骨骼机器人研究[11],其控制策略采用肌电信号来识别人体意图,通过肌电信号辨识关节所需的关节力矩,进而对电机实施控制,并通过检测到足底压力信息计算人机系统的零点力矩(Zero moment point,ZMP),辅助完成外骨骼步态的控制.肌电信号检测能获得穿戴者的运动意图,但也存在穿戴麻烦、易受环境干扰等影响.美国西北大学的Aguirre-Ollinger等针对研制的单关节外骨骼机械腿,进行了基于导纳原理的机械腿运动控制研究[12],实验结果表明,其控制能有效增加人腿运动的敏捷度.北京航空航天大学的刘棣斐等设计了基于液压的下肢助力外骨骼,并进行了基本导纳原理的仿真,结果表明导纳控制减少了人机之间的交互力并实现了准确跟踪[13].
外骨骼虽然和机器人一样是高度集成的机电一体化系统,但是机器人在控制方面更偏向于执行预编程的动作,而外骨骼则强调辅助操作者运动,这就要求外骨骼能够识别操作者的动作意图,并给予其适当的帮助,否则外骨骼的运动反而会成为阻力,让操作者运动受限.为了解决这一问题,则需控制外骨骼降低对操作者运动灵活性的影响.操作者穿戴外骨骼进行运动后,由于外骨骼的机构重量、摩擦及惯量耦合在操作者的人腿上,增加了人腿的阻抗使得其灵活性变差.针对这一典型的人体交互问题,多采用阻抗控制方法.机构重量与摩擦带来的灵活性问题很容易通过控制得以补偿,但是惯量变化带来的灵活性变差,由于控制的稳定性问题需进行控制参数的合理选择才能得以补偿.外骨骼引起的惯量增加将缩减腿部的摆动频率,进而影响氧耗及行走速度.Browning等的研究[14]发现人体腿部质量的增加将加重人体行走的氧耗量,而这个耗氧量的增加与负重腿惯量力矩的增加有很大的关联性. Royer等也有类似的研究[15],其研究发现腿部质量的增加将加剧行走过程中腿部的摆动时间及步长时间,Doke等[16]的实验研究也表明,测试者的摆腿运动在自然频率下其能耗最小,并且随着频率增加呈四次方增加.综上分析,对外骨骼机械腿实施有效的惯量补偿控制将对提高操作者腿部的摆动频率起着重要的作用.
为了提高穿戴者的灵活性,本文针对设计的膝关节外骨骼样机,提出一种力外环和位置内环的导纳控制方法.构建人机系统动力学模型;通过合理设计导纳参数将穿戴者与外骨骼之间的交互力矩转化为外骨骼的期望运动轨迹;为了实现摆动腿摆动过程中前摆与后伸的平顺换向,采用肌电信号进行人体运动意图的预判,并进行惯量补偿控制,最终实现外骨骼机械腿的摆动控制.惯量补偿则采用一个经过低通滤波的加速度与一个惯量增益的乘积所形成的闭环反馈进行实施.
1 膝关节外骨骼机构设计
进行人体行走运动生物力学研究,获得人体行走运动过程中下肢膝关节的角度变化及力矩变化值[17],并进行膝关节助力机器人设计.膝关节外骨骼机械腿三维模型图及样机实物图分别如图1(a)和(b)所示.膝关节机械腿采用MAXON电机(EC40)进行驱动,为了实现扭矩放大,设计槽轮与电机输出轴相连,通过套索带动下方大传动轮(槽轮与传动轮比例为1:15,大传动轮进而带动膝关节轴进行旋转运动.为了实施膝关节机械腿摆动控制,在膝关节轴上安装有扭矩传感器,对膝关节轴的扭矩进行实时检测.为了适应膝关节机械腿对不同穿戴者的可穿戴性,设计了小腿绑带调节臂.为了对机械腿的关节角度及角加速度等进行检测,在外骨骼机械臂上预留了传感器安装位置并放置了9轴传感器.在膝关节前后放置了红外传感器,用于膝关节的角度限位.

图1 膝关节外骨骼机械腿Fig.1 The knee joint exoskeleton
2 控制系统研究
2.1 导纳模型建立
导纳理论来源于机械阻抗、速度和作用力之间的关系,是一种基于广义惯量、阻尼和刚度的等效网络思想.把外骨骼与穿戴者耦合在一起的人机系统看作一个简单的理想导纳控制模型,其定义为:

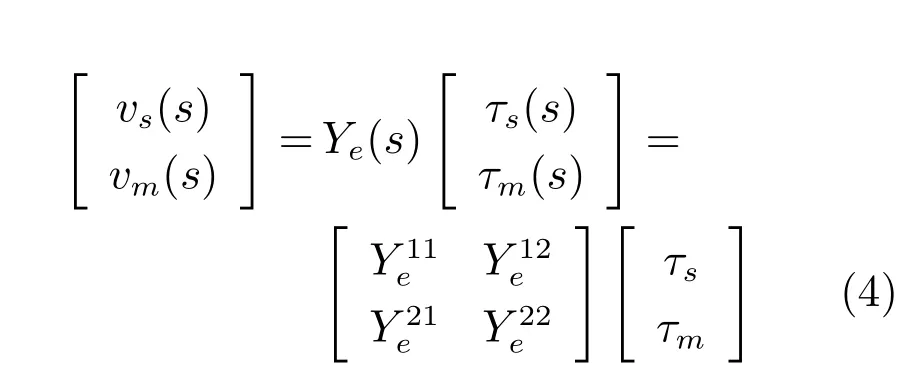
人机系统的导纳模型如图2所示.由于电机输出轴通过套索传动机构带动外骨骼机械腿运动,故外骨骼模型中包含两个惯量,一个是反映在电机输出轴的转动惯量Im,另一个是反映外骨骼驱动系统输出的转动惯量Is,此惯量为套索与力矩传感器之间的机构惯量,也即是传动轮与传感器安装基座的转动惯量.惯量Im和Is之间通过弹性系数为kc的弹簧与阻尼系数为bc的阻尼器耦合在一起,弹簧与阻尼器分表代表套索的弹性性能与系统损耗.扭矩传感器的安装点为S,外骨骼机械腿的转动惯量Ie与人腿的转动惯量Ih叠加,并在S点处与Is刚性耦合在一起.反作用在外骨骼上的力矩是人腿运动力矩τh,外骨骼的驱动力矩是τm,安装在S点处的扭矩传感器检测到的扭矩是τs,电机输出角度为θm,外骨骼机械腿输出角度为θs.

图2 导纳控制模型图Fig.2 The admittance control model diagram
外骨骼控制系统图如图3所示.主要由导纳控制器及惯量补偿器形成的闭环控制系统组成.导纳控制器包含理想导纳模型及基于线性二次型(Linear-quadratic,LQ)的轨迹跟踪控制组成.理想导纳模型是一个包含理想转动惯量理想阻尼系数及理想弹性系数的线性时变系统(Linear time-invariant,LTI).定义外骨骼的运动状态方程如式(2)所示.
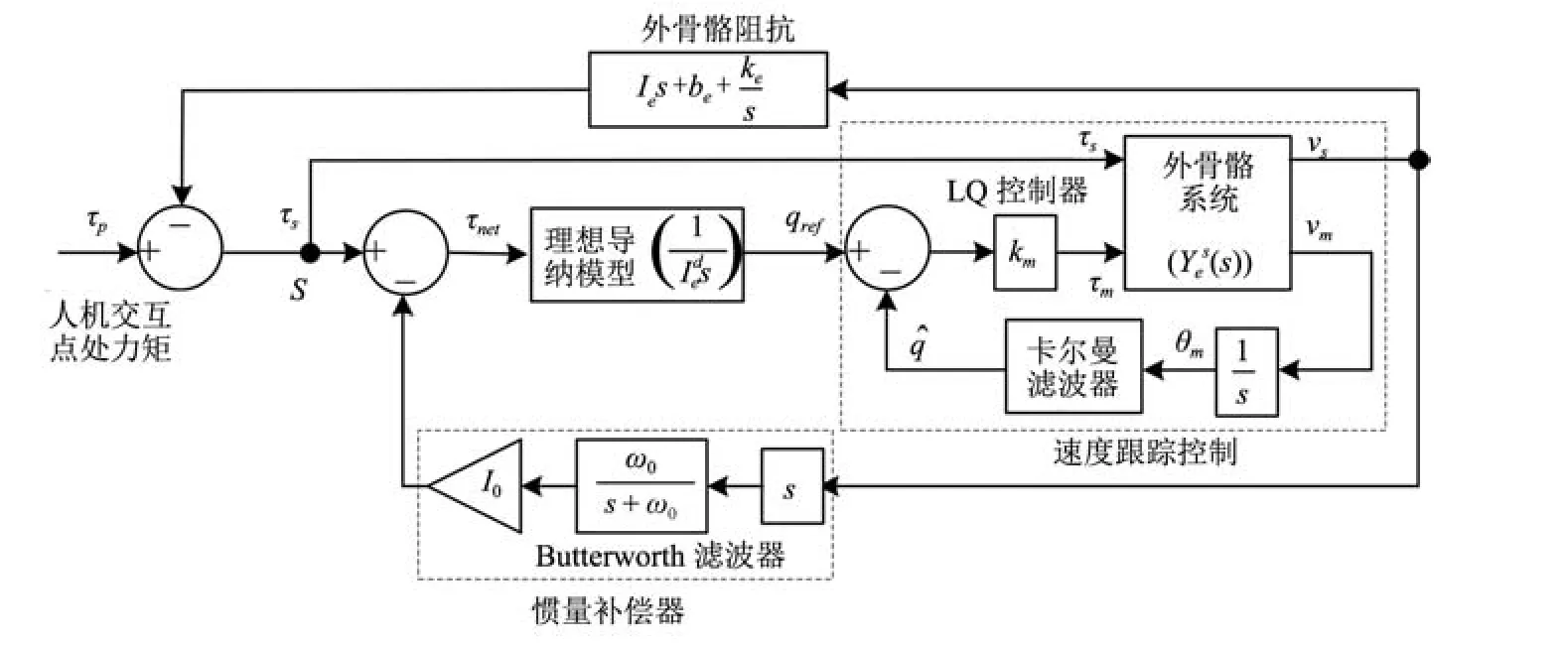
图3 基于惯量补偿的导纳控制系统图Fig.3 The admittance control block diagram based on emulated inertia compensation
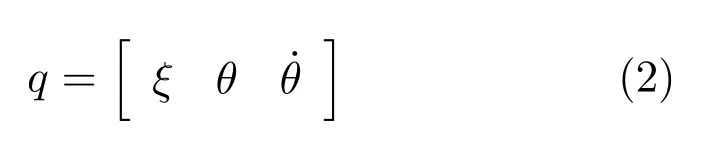
式中,θ为外骨骼机械腿相对于垂直方向的转动角度,ξ=∫θdt.尽管严格意义上来说,线性时变系统是一个二阶系统,它的状态量可以通过角度值θ与角速度值来描述,而q中包含一个积分项ξ是为了使得控制器能缩小稳态跟踪误差,因此采用增广的三阶状态等式进行理想导纳模型建模,对于一个足够小的采样周期T,理想导纳模型的线性时变系统可以采用欧拉法进行离散化,如式(3)所示.

2.2 控制系统的稳定条件分析
对于导纳控制,导纳特性参数的选择非常关键,较小的导纳特性虽能增加系统的灵敏性但却增加了丧失系统稳定性的风险,如何设计期望导纳参数以保证系统的稳定性是导纳控制有效实施的关键点,所以需要对导纳控制稳定性进行分析.
由图3可知,选择合适的惯量增益参数I0,理论上可实现在不失稳的条件下,对惯量进行补偿减小作用在人体下肢上的惯量.作用在人机交互点处的闭环导纳模型如下式(9)所示.
结合图2中的导纳控制模型,得出动力学模型方程如式(5)、(6)所示.

电机输出轴转动角度θm可由电机编码器读取,并采用基于卡尔曼滤波的状态观测器获取状态估算轨迹此外,对外骨骼转动角速度vs进行微分,获得转动角加速度,对角加速度进行了一个Butterworth低通滤波,使其截止频率ω0为人腿正常摆动频率,经过滤波的数据乘以一个可调放大系数I0后作为补偿扭矩反馈到导纳模型的输入端,作为惯量补偿,如式(8)所示.

可求出Np(s)与Dp(s)如式(12)与(13)所示.
通过求解Re{G(jω)}>−1与Im{G(jw)}=0的解,可获得满足系统稳定的惯量补偿增益参数I0的调节范围.同时,系统的稳定性还可通过开环传递函数的幅频、相频的曲线图进行分析,对外骨骼系统进行模型参数识别,设Im=0.004kg·m2,Is=0.009kg·m2,Ie=0.2kg·m2,be=0(N·m·s)/rad,ke=0(N·m)/rad,人腿的阻抗参数结合文献[17]设定为:Ih=0.25kg·m2,bh=1.8(N·m·s)/rad,kh=10(N·m)/rad.根据正常人腿的摆动频率设定ω0=24rad/s,Butterworth滤波的截止频率为4Hz.设惯量补偿增益参数I0是与人腿惯量Ih与外骨骼惯量Ie有关的表达式,如式(14)所示:

图4给出了3种α值条件下,开环传递函数的幅值与相位曲线图,从图中可看出当α约为0.06时,系统开始变得不稳定.
当人腿与外骨骼机械腿耦合在一起时,其闭环系统导纳如式(15)所示.


图4 开环传递函数(s)Zh(s)的幅值相位图Fig.4 Frequency-response plots of the open loop transfer function(s)Zh(s)
图5给出了闭环系统在3种值条件下的Bode图,为了便于分析比较,也给出了的Bode图,从图中可以看出,耦合人腿的外骨骼系统具有较好的稳定性,且有较高的导纳幅值,在频率1.11Hz时,导纳幅值比没有耦合人腿导纳幅值高大约9dB.

图5 耦合人腿的外骨骼闭环系统的幅值相位图Fig.5 Frequency-response plots of the close loop transfer functionof the coupled human limb-exoskeleton system
3 膝关节外骨骼控制实验
3.1 基于肌电信号的摆动换向模式识别
膝关节外骨骼机械腿的前期实验研究表明,在腿部的前摆与后伸运动过程中,对电机实施控制,机械腿能实现对穿戴者的快速跟随运动,但在摆动换向时,存在跟随滞后,进而造成运动不平稳.穿戴者的运动意图对膝关节机械腿控制起到非常关键的作用,如果能及时对穿戴者运动进行预测并施以控制,将大大提高控制的平稳性及运动跟随效果.由于表面肌电信号存在的种种优越性,所以本次设计通过采集表面肌电信号来实现人体运动意图的预测.但是表面肌电信号的采集是一个非常复杂的过程,它是肌肉活动在皮肤表面的表现.一般情况下,表面肌电信号的幅值很小,在100µV~5000µV之间,主要信号频率为20Hz~150Hz.信号非常微弱,而且很容易受到50Hz工频信号干扰.因此,在设计过程中需要考虑对信号进行放大滤波.在选择电极时需要考虑电极与皮肤接触程度、阻抗大小以及其操作的难易程度,本次设计中所使用的是一次性电极片.
在表面肌电信号采集处理系统中,主要包含肌电信号接收电极、滤波放大电路、数据采集等.进行前置放大电路、低通滤波电路等设计,自制肌电信号放大电路,进行肌电信号的采集.
在人体下肢膝关节摆腿运动中,其主要驱动肌肉群为股二头肌和股四头肌,股四头肌控制向前摆腿,股二头肌控制向后摆腿.一次性电极片黏贴位置如图6所示.
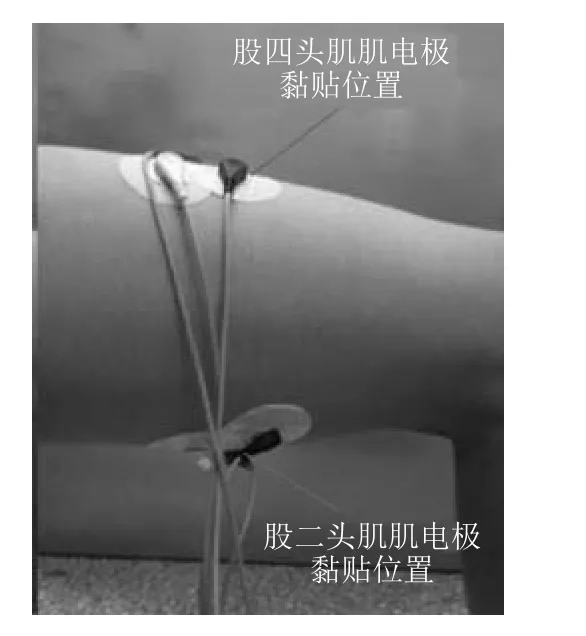
图6 肌电信号采集系统Fig.6 EMG single acquisition system
表面肌电信号经A/D采集输入计算机后,需进行进一步的处理分析,采用均方根值(Root mean square,RMS)对采集的肌电信号进行处理,计算公式如式(15)所示.

其中,x(t)为肌电信号,T为采集时间长度,Xi为x(t)的采样值,N为采样点数.
RMS表征了肌电信号的功率,与整块肌肉收缩的强度有很好的相关性,同时RMS对肌肉疲劳也比较敏感.图7给出了股四头肌与股二头肌在摆腿运动中肌电信号变化与膝关节角度变化对应关系图.
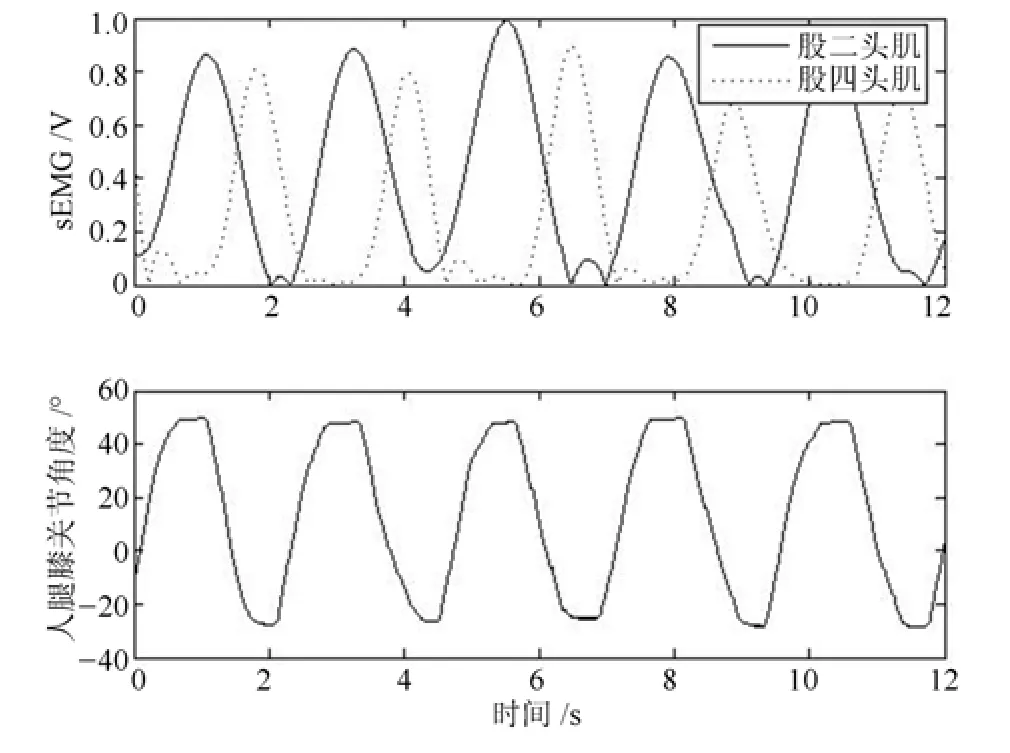
图7 股二头肌及股四头肌的肌电信号与膝关节角度变化关系图Fig.7 EMG single of the biceps and quadriceps femoris muscle and knee joint angle
从图7中可以看出,当股四头肌肌电信号持续增加至最大时,膝关节进行后屈换向,而当股二头肌肌电信号持续增加至最大时,膝关节进行前伸换向.由股四头肌与股二头肌的肌电信号变化趋势可对膝关节的摆腿运动换向进行运动识别,进而融入上位机的控制中及时对穿戴者运动进行预判,辅助实施跟随运动控制.
3.2 膝关节摆动跟随控制
对膝关节外骨骼机械腿实施跟随运动控制实验.受试者通过小腿绑缚系统与膝关节机械腿关联.受试者按照正常行走摆腿幅度进行小腿摆腿运动,肌电信号采集系统进行伸腿与屈腿运动换向的预判,当检测到股四头肌肌电信号持续增加时至最大时,则为膝关节后屈换向,当检测到股二头肌肌电信号持续增加至最大时,则为膝关节前伸换向.扭矩传感器对外骨骼扭矩τs进行检测,安装在膝关节机械腿上的九轴传感器对机械腿的速度vs进行检测,电机编码器对电机转动角度θm进行检测,上位机融合传感器信息进行处理进而实施外骨骼控制.在受试者腿部内侧绑缚装有关节角度的柔性夹具,夹具的一端通过细绑带与小腿绑缚在一起,另一端与大腿绑缚在一起,对受试者人腿关节角度变化进行检测,用以进行外骨骼机械腿关节角度与人腿关节角度的对比分析.
在惯量补偿的实施中,首先,外骨骼机械腿角加速度经过四阶Butterworth低通滤波,然后,乘以相当于惯量项的负反馈增益I0.在这个过程中,低通滤波截止频率的选择非常关键,如果使用较高的截止频率,则加速度中的高频部分会使得腿部的随意运动很难控制.相反的,如果使用较低的截止频率,则由于滤波造成的相位滞后则会缩减惯量补偿的保真度.由此,在进行惯量补偿之前,需要对测试者进行一系列的实验测试,以期获得合适的截止频率.
实验过程中,机械腿能跟随受试者实现快速运动.膝关节机械腿运动序列图如图8所示.机械腿膝关节角度与受试者膝关节角度变化图如图9所示.

图8 膝关节机械腿跟随人腿摆动序列图Fig.8 Swing sequence diagram of the knee joint exoskeleton
图9可看出,膝关节机械腿角度变化基本与人腿保持一致,误差范围为±12%,从而说明了机械腿跟随运动的有效性.由于穿戴者是坐在凳子上进行摆腿实验,穿戴者的膝关节的前伸动作不受坐姿的影响,而后展动作因穿戴的角度测量夹具及机械腿的空间问题使得运动范围受限,从图8中也可看出这种变化规律,机械腿前伸角度变化范围比较大,而后展角度变化范围较小,且后展角度在最大位置处与穿戴者关节角度存在误差,这也与实际情况相吻合.
初步的实验表明基于惯量补偿的导纳控制能实现外骨骼对穿戴者的摆动跟随运动,但如何评价其助力效果是我们下一步的研究重点,同时,当受试者穿戴外骨骼机械腿后,改变其摆腿频率后,外骨骼对其运动频率响应也是我们下一步研究的重点,因为外骨骼对受试者运动变化的响应是决定外骨骼快速跟随及有效助力的关键指标.
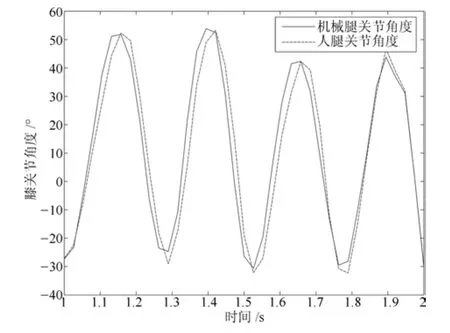
图9 机械腿与受试者关节角度变化图Fig.9 The angle change of the exoskeleton and the operator
4 膝关节外骨骼控制实验
本文设计了膝关节外骨骼样机.建立了膝关节外骨骼人机耦合系统导纳模型,进行了导纳控制策略研究,并进行了控制系统的稳定性分析.采用肌电信号采集股二头肌和股四头肌的运动变化信息,对摆动运动的换向动作进行预测,融入到膝关节外骨骼样机控制中,实施了膝关节外骨骼机械腿对受试者的摆腿运动跟随控制实验研究,实验结果表明,导纳控制能够屏蔽膝关节外骨骼自身的固有机械导纳特性,降低对受试者施加的额外负担,外骨骼机械腿能实现有效跟随运动.
1 Yan T F,Cempini M,Oddo C M O,Vitiello N V.Review of assistive strategies in powered lower-limb orthoses and exoskeletons.Robotics and Autonomous Systems,2014,64: 120−136
2 Robert B.Exoskeletons and robotic prosthetics:a review of recent developments.Industrial Robot:An International Journal,2009,36(5):421−427
3 Hu Jin,Hou Zeng-Guang,Chen Yi-Xiong,Zhang Feng, Wang Wei-Qun.Lower limb rehabilitation robots and interactive control methods.Acta Automatica Sinica,2014,40(11):2377−2390 (胡进,侯增广,陈翼雄,张峰,王卫群.下肢康复机器人及其交互控制方法.自动化学报,2014,40(11):2377−2390)
4 Rene J F,Verlinden O.Review of control algorithms for robotic ankle systems in lower-limb orthoses,prostheses, and exoskeletons.Medical Engineering&Physics,2011,34(4):397−408
5 Yang Wei,Zhang Xiu-Feng,Yang Can-Jun,Wu Hai-Jie.Design of a lower extremity exoskeleton based on 5-bar human machine model.Journal of Zhejiang University(Engineering Science),2014,48(3):430−435,444 (杨巍,张秀峰,杨灿军,吴海杰.基于人机5杆模型的下肢外骨骼系统设计.浙江大学学报(工学版),2014,48(3):430−435,444)
6 Sun Jian,Yu Yong,Ge Yun-Jian,Chen Feng,Shen Huang-Huan.Research on multi-sensors perceptual system of wearable power assist leg based on interaction force signal and joint angle signal.Journal of University of Science and Technology of China,2008,38(12):1432−1438 (孙建,余永,葛运建,陈峰,沈煌焕.基于接触力信息的可穿戴型下肢助力机器人传感系统研究.中国科学技术大学学报,2008,38(12):1432−1438)
7 Xiang Kui,Yi Chang,Yin Kai-Yang,Ge Yun-Jian.An ankle exoskeleton for walking assist.Journal of Huazhong University of Science and Technology(Natural Science Edition), 2015,43(S1):367−371 (向馗,易畅,尹凯阳,葛运建.一种踝关节行走助力外骨骼的设计.华中科技大学学报(自然科学版),2015,43(S1):367−371)
8 Han Ya-Li,Qi Bing,Yu Jian-Ming,Song Ai-Guo,Zhu Song-Qing.Development and experimental study of elastic actuator for a power-assisted knee exoskeleton.Robot,2014,36(6):668−675 (韩亚丽,祁兵,于建铭,宋爱国,朱松青.面向助力膝关节外骨骼的弹性驱动器研制及实验研究.机器人,2014,36(6):668−675)
9 Zhang Li-Xun,Li Chang-Sheng,Liu Fu-Qiang.Design and experimental analysis of the multi-mode lower limb rehabilitation robot.Chinese Journal of Rehabilitation Medicine, 2011,26(5):464−466 (张立勋,李长胜,刘富强.多模式下肢康复训练机器人的设计与实验分析.中国康复医学杂志,2011,26(5):464−466)
10 Kazerooni H,Steger R,Huang L H.Hybrid Control of the Berkeley lower extremity exoskeleton(BLEEX).International Journal of Robotics Research,2006,25(5−6): 561−573
11 Kawamoto H,Lee S,Kanbe S,Sankai Y.Power assist method for HAL-3 using EMG-based feedback controller. In:Proceedings of the 2003 IEEE International Conference on Systems,Man and Cybernetics.Washington D.C.,USA: IEEE,2003:1648−1653
12 Aguirre-Ollinger G,Colgate J E,Peshkin M A,Goswami A.Design of an active one-degree-of-freedom lower-limb exoskeleton with inertia compensation.The International Journal of Robotics Research,2011,30(4):486−499
13 Liu Di-Fei,Tang Zhi-Yong,Pei Zhong-Cai.Swing motion control of lower extremity exoskeleton based on admittance method.Journal of Beijing University of Aeronautics and Astronautics,2015,41(6):1019−1025 (刘棣斐,唐志勇,裴忠才.基于导纳原理的下肢外骨骼摆动控制.北京航空航天大学学报,2015,41(6):1019−1025)
14 Browning R C,Modica J R,Kram R,Goswami A.The effects of adding mass to the legs on the energetics and biomechanics of walking.Medicine and Science in Sports and Exercise,2007,39(3):515−525
15 Royer T D,Martin P E.Manipulations of leg mass and moment of inertia:efects on energy cost of walking.Medicine and Science in Sports and Exercise,2005,37(4):649−656
16 Doke J,Donelan J M,Kuo A D.Mechanics and energetics of swinging the human leg.Journal of Experimental Biology, 2005,208(3):439−445
17 Han Y L,Wang X S.The biomechanical study of lower limb during human walking.Science China Technological Sciences,2011,54(4):983−991
韩亚丽南京工程学院机械学院副教授. 2011年获得东南大学机械工程学院博士学位.主要研究方向为仿生机器人技术及智能控制,人体运动生物力学.本文通信作者.E-mail:s966237@163.com
(HAN Ya-LiAssociate professor at the School of Mechanical Engineering, Nanjing Institute of Technology.She received her Ph.D.degree from Southeast University in 2011.Her research interest covers robot technology,intelligent control,and biomechanics research of human motion. Corresponding author of this paper.)
许有熊南京工程学院自动化学院副教授.2010年获得南京理工大学机械工程学院博士学位.主要研究方向为机电一体化.E-mail:zdhxxyx@njit.edu.cn
(XU You-XiongAssociate professor at the School of Automation,Nanjing Institute of Technology.He received his Ph.D.degree from Nanjing University of Science and Technology in 2010.His main research interest is mechanotronics.)

高海涛南京工程学院机械学院副教授. 2011年获得东南大学机械学院博士学位.主要研究方向为服务机器人.
E-mail:ght@njit.edu.cn
(GAO Hai-TaoAssociate professor attheSchoolofMechanicalEngineering,Nanjing Institute of Technology.He recived his Ph.D.degree from Southeast University in 2011.His main research interest is service robot.)

朱松青南京工程学院机械学院教授. 2009年获得东南大学机械学院博士学位.主要研究方向为机电系统集成,机器人技术,机电系统测试与仿真.
E-mail:zusongqing@126.com
(ZHU Song-QingProfessor at the School of Automation,Nanjing Institute of Technology.He received his Ph.D.degree from Southeast University in 2009.His research interest covers electromechanical system integration,robot technology,electromechanical system testing and simulation.)

时 煜南京工程学院机械学院硕士研究生.主要研究方向为助力外骨骼机器人技术.
E-mail:13512518837@163.com
(SHI YuMasterstudentatthe School of Mechanical Engineering,Nanjing Institute of Technology.His main research interest is assistive exoskeleton robot technology.)
Knee Joint Exoskeleton Swing Control with Admittance Control
HAN Ya-Li1XU You-Xiong1GAO Hai-Tao1ZHU Song-Qing1SHI Yu1
To solve the problem of the operator's movement tracking during the rehabilitation training of knee joint exoskeleton,an emulated inertia compensation control method is presented,which is based on admittance control.An admittance controller that can convert the interactive torque between exoskeleton and operator to the desired trajectory is designed.A closed-loop feedback is given by the product of the low-pass fltering acceleration and inertia gain to achieve the emulated inertia compensation.Combined with the leg muscle surface EMG signal,the reverse of leg swing movement is distinguished,and then the implementation of the knee joint exoskeleton's swing control is done.Experimental results show that the relative error of joint angle is±12%,and that the knee joint exoskeleton can pursuit the operators movement very well.
Knee exoskeleton,motion following,admittance control,human motion intention recognition,interaction control
韩亚丽,许有熊,高海涛,朱松青,时煜.基于导纳控制的膝关节外骨骼摆动控制研究.自动化学报,2016,42(12): 1943−1950
Han Ya-Li,Xu You-Xiong,Gao Hai-Tao,Zhu Song-Qing,Shi Yu.Knee joint exoskeleton swing control with admittance control.Acta Automatica Sinica,2016,42(12):1943−1950
2016-01-25 录用日期2016-10-10
Manuscript received January 25,2016;accepted October 10, 2016
国家自然科学基金(51205182),江苏省科技支撑项目(BE2014142),校创新基金重大项目(CKJA201501,CKJA201605),南京工程学院创新基金(CKJB201202)资助
Supported by National Natural Science Foundation of China (51205182),the Science and Technology of Jiangsu Province (BE2014142),Major Program of Innovation Fund of Nanjing Institute of Technology(CKJA201501,CKJA201605),Innovation Fund of Nanjing Institute of Technology(CKJB201202)
本文责任编委赵新刚
Recommended by Associate Editor ZHAO Xin-Gang
1.南京工程学院南京211167
1.Nanjing Institute of Technology,Nanjing 211167