基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法
2017-01-10王晓峰李醒王建辉
王晓峰 李醒 王建辉
基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法
王晓峰1,2李醒1王建辉1,2
设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.在机器人与人体上肢接触面安装力传感器采集人机交互力矩信息作为量化的主动运动意图,设计了一种无模型自适应滤波算法使交互力矩变得平滑而连贯;以人机交互力矩为输入,综合考虑机器人末端点与参考轨迹的相对位置和补偿力的信息,设计了人机交互阻抗控制器,用于调节各关节的给定目标速度;设计了将无模型自适应与离散滑模趋近律相结合的速度控制器完成机器人各关节对目标速度的跟踪.仿真结果表明,该控制方法可以实现外骨骼式上肢康复机器人辅助患者完成主动交互训练的功能.通过调节人机交互阻抗控制器的相应参数,机器人可以按照患者的运动意图完成不同的主动交互训练任务,并在运动出现偏差时予以矫正.控制器在设计实现过程中不要求复杂准确的动力学建模和参数识别,并有一定的抗干扰性和通用性.
无模型自适应,康复机器人,主动交互,力传感器,阻抗控制
DOI10.16383/j.aas.2016.c160057
大量研究表明上肢康复机器人在脑卒中偏瘫患者上肢康复运动过程中能够发挥很大的作用[1−2],可用于脑卒中康复的各个时期[3].上肢康复机器人辅助患者通过特定的康复功能训练能够促进中枢神经系统的功能代偿和重组,既能改善脑损伤偏瘫患者上肢功能,又能提高患者日常生活活动能力[4].在现有上肢康复训练机器人中,外骨骼式上肢康复机器人具有明显的优势[5−6].它们都具有与人体上肢相似的结构,各个关节也与人体上肢各个关节相匹配.目前国内外已经开发出多种外骨骼式上肢康复训练机器人[7−8].这种外骨骼式机器人设备在康复中的使用可以为上肢提供高强度、重复、特定任务和交互治疗,还可以对整个过程提供客观的、可靠的监控[9].上肢康复外骨骼的优势在于[10]:可以控制整个上肢的姿势;可以提供大范围三维运动;可以为患肢提供重力补偿.外骨骼式上肢康复机器人的使用,可以辅助康复医师完成大多数的康复任务,会极大地方便康复医师的工作,有助于运动康复领域应对我国社会人口老龄化日益严重、劳动力相对减少的严峻形势.
康复机器人主要有两种康复训练模式:被动训练和主动训练[11].其中被动训练主要针对早期肌力比较弱的患者,由机器人带动患肢按照预定轨迹运动,即轨迹跟踪控制.主动训练,又被称为按需辅助(Assisted-as-needed,AAN)训练[10],其目标是辅助患者完成运动任务,主要适用有一定运动能力的患者[12],由机器人根据患者需要做适当交互辅助,完成康复运动.两种训练模式分别针对康复治疗的不同阶段,但都要患者高强度的主动参与,否则便不足以刺激神经回路,康复效果也不理想.相对而言,按需协助训练中患者的主动参与意识更强,但具体实现需要考虑两个方面[13]:1)运动需求的量化评估;2)机器人如何提供这种辅助.
主动运动意图的数字化,即运动需求的量化评估主要有两类方法:1)基于生理信号的方法[14],通过采集人体表面肌电(Surface electromyography, sEMG)信号检测人体的主动运动意图,根据人体上肢阻抗参数控制机器人运动[15].使用肌肉维度传感器和负载单元来估计人体运动意图,也可以用于上肢康复机器人的控制[16].生理信号直接反映人体的主动运动意图,但是采集困难、信号受外界影响较大、精度较差且学习成本较高[17],难以直接利用.2)基于力/位置传感器的方法[18−19]即通过检测人体上肢主动施加的力量和产生的运动,建立人体上肢与机器人各关节的力矩映射模型[20]判断人的主动运动意图.力/位信号的采集比生理信号采集可靠,但是要通过人-机系统动力学模型才能得到人的主动力[21],对动力学建模和参数辨识的要求都很高[22].而且,对于偏瘫患者,自身无法连续平滑地控制力量和运动,所以无论采用哪种方法,获得的信号都会产生震颤和停顿等异常,因此要保证运动需求量化评估信号的平滑和连贯,即短暂的肌力异常不会大幅影响后续的辅助.
为了提供按需辅助的训练,外骨骼式上肢康复机器人通常需要采用柔顺的主动交互训练控制方法[23],以阻抗控制的形式使用力交互控制器,后接力/位置控制器作为底层控制器.任务层控制器确定采用主动交互训练任务后,由阻抗控制器负责人体与机器人的交互,力/位控制器负责控制康复机器人完成指定运动.文献[13]提到了一种“力场”的概念,是阻抗控制器的一种实现,即沿着末端参考轨迹建立“虚拟墙”,偏离轨迹将会受到返回轨迹的阻抗力,可以很好地实现机器人与人体上肢力的交互.但外骨骼式上肢康复机器人是由不规则杆件串联而成的多关节机器人,是一个十分复杂的多输入多输出的仿射非线性系统,具有时变性、耦合性和非线性等动力学特征.控制过程中存在参数不确定性、未建模动态和环境干扰等不确定因素,再加上人体上肢的影响,不仅很难建立完整的、精确的数学模型,也极大地影响了机器人的控制品质,甚至造成系统的不稳定.带有指数趋近律的非线性滑模控制[18,24]考虑到了机器人系统的动力学建模和上肢非线性运动,大大减少了颤振,并且提供了很高的动态跟踪性能,但控制器的计算对建模精度的要求很高.基于模糊近似的自适应反演控制[25]采用自适应模糊估计器来估计人机系统的动态不确定性,然后采用迭代学习算法来补偿未知时变周期扰动,但这种控制器主要针对周期轨迹跟踪控制.直接采用力控制方法[26]不必考虑外骨骼系统的准确建模,但是将机器人单个关节视为线性进行控制又不够准确.
基于以上分析,本文设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.主要包括:1)在机器人与人体上肢接触面安装交互力传感器,直接检测人体上肢主动施加的交互力作为运动需求量化评估,避免动力学建模与参数辨识的大量计算;2)针对获取的信号存在震颤和停顿等异常问题,采用无模型自适应滤波的方法保证需求量化评估信号的平滑和连贯;3)通过阻抗控制调整人体上肢与机器人之间力的主动交互,根据获取的交互力信号,参考实际运动轨迹提供柔顺的辅助和矫正;4)采用无模型自适应滑模控制,将基于数据驱动的无模型自适应控制[27−28]方法通过改进应用到外骨骼式上肢康复机器人的控制中,不建立具体动力学模型,但考虑机器人时变、耦合、非线性和不确定性等动力学特性,保证辅助的顺利执行.该方法保证了患者自身运动意图的实现,又能对异常的运动轨迹做出矫正,通过调节阻抗参数可以实现不同模式的辅助,并且控制器设计和实现方法简单直接,避免了由于建模精度限制导致的控制问题.
以下章节将对该方法进行详细的介绍.第1节介绍本研究使用的康复机器人平台,并对康复机器人系统进行运动学和动力学分析;第2节对基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制器进行设计;第3节分别通过仿真分析介绍该方法的具体实现手段,并验证其可行性;全文的结论由第4节给出.
1 五自由度外骨骼式上肢康复机器人
本文研究的主动交互训练控制方法基于如图1所示的五自由度外骨骼式上肢康复机器人[29].该机器人由一个基座和五个形状不规则的刚性连杆通过活动关节连接而成,每个关节通过电机驱动.机器人每个连杆的结构都很复杂,其质心在杆件外部,活动关节连接两个连杆的旋转方向也不一致,运行在三维空间中.考虑康复训练的安全因素,每个关节的旋转角度都有一定的限制.在主动交互康复训练过程中,患者患肢穿戴外骨骼向着设定好的目标移动.通常,患肢对外骨骼施加的力是不足以带动外骨骼移动的,但是肢体与外骨骼的接触会产生交互力的变化.这就需要设计控制器获取代表患者运动意图的交互力,并以此控制机器人辅助患肢完成主动交互训练.由于患者患肢的不确定性,产生的交互力也是不确定的,此机器人系统是典型的带有不规则扰动的多变量非线性耦合系统.
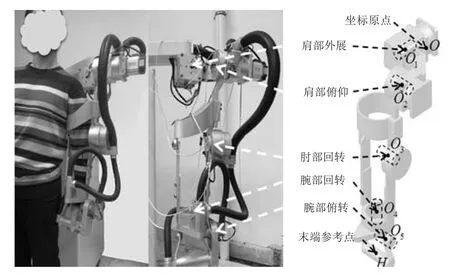
图1 五自由度外骨骼式上肢康复机器人Fig.1 Five degree-of-freedom exoskeleton upper limb rehabilitation robot
由于机器人各关节安装有力矩传感器,将测量得到的人-机系统力矩与通过精确建模和辨识计算出来的力矩作比较[21],可以判断交互力矩的大小,得到患者主动运动意图.但是这对动力学建模与参数辨识的要求较高,计算量较大.相对而言将压力传感器[30]安装在人体上肢与外骨骼接触的表面,在康复训练过程中直接测量各关节的交互力作为运动需求的量化评估则更加简单直接,获取信号存在的震颤和停顿等异常问题可以通过滤波算法解决.
1.1 运动学分析
在图2建立运动学基坐标系和各旋转坐标系[31],给出了各旋转中心的位置及其相互关系,以点O为绝对坐标系原点,设点H为机器人末端,可以得到D-H参数如表1.由于机器人结构复杂,除了编号以外的点都是设置的中间点.根据D-H参数表可以求得各个坐标系之间的变换矩阵A0,A1,···,An(n=5),所以,机器人的基座与坐标系i之间的变换则为:

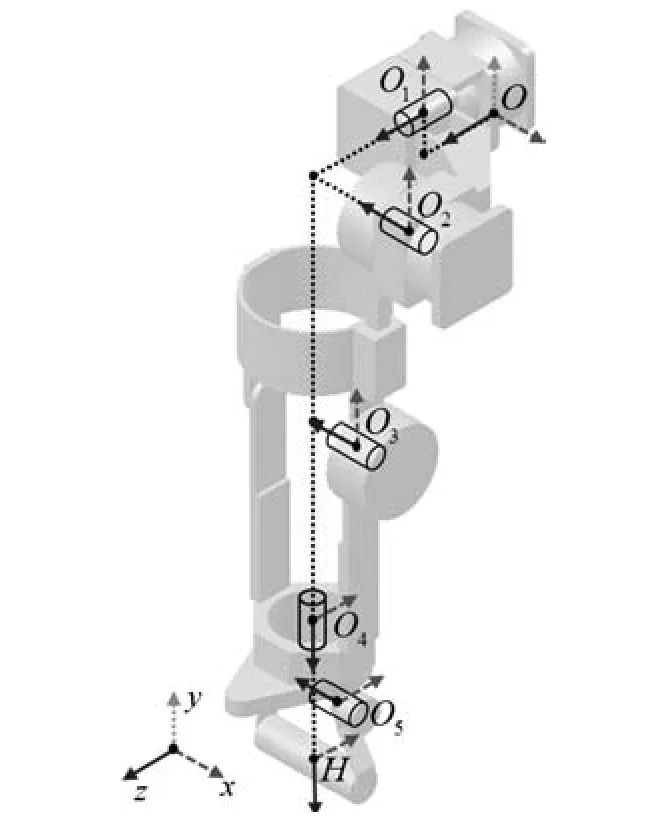
图2 外骨骼机器人运动学分析Fig.2 Kinetic analysis of robotic exoskeleton
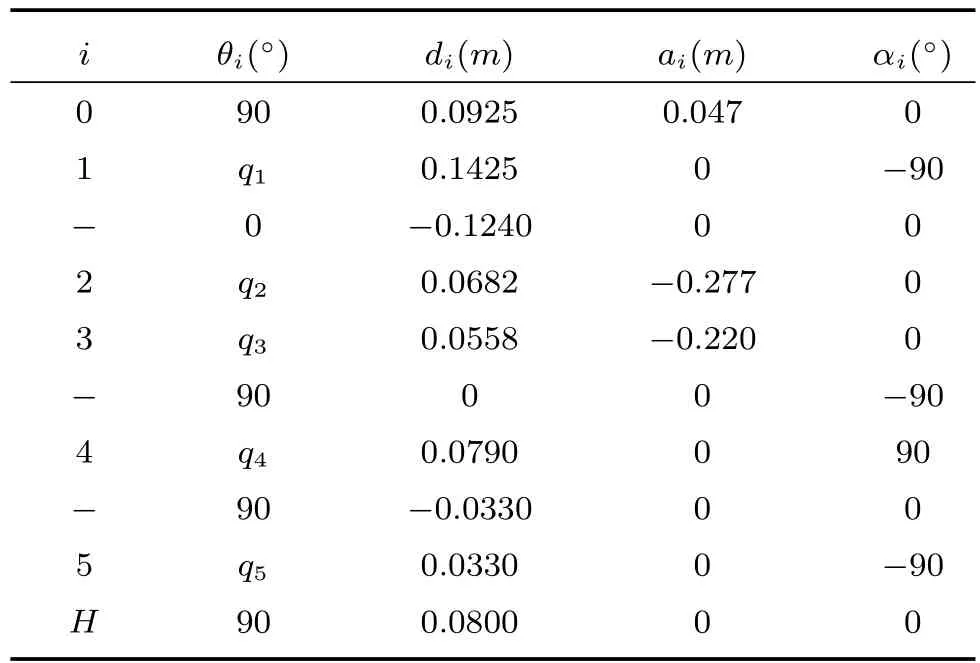
表1 外骨骼机器人运动学分析D-H参数表Table 1 D-H kinematics parameters of the robot
1.2 动力学分析
通过SimMechanics模型可以获得关节i的质量mi、传动装置的等效转动惯量Ii(act)、连杆i的伪惯量矩阵Ii和相对于前端坐标系的重心¯ri等参数值.采用拉格朗日动力学分析算法,可得n关节动力学系统通用模型[32].多关节串联机器人动力学方程非常复杂,所含项数较多,随着关节数的增加,方程中包含的项数呈几何级数增加.方程具有高度非线性和比较严重的耦合关系.考虑主动训练过程中负载变化、摩擦、扰动等不确定因素和人与机器人的交互力对模型的影响,规范整理并简化可得外骨骼式上肢康复机器人动力学模型如下:
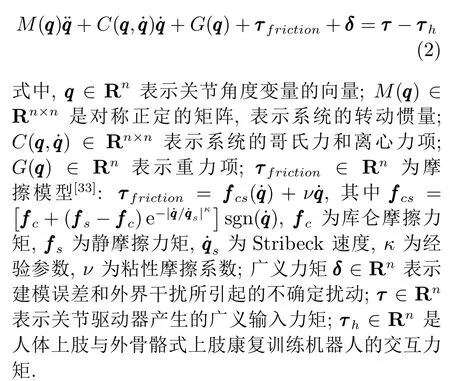
已知式(2)具有如下的结构特性[34−35]:
特性1.惯性矩阵是对称正定矩阵,并且有界,即:

其中,kg为正常数.
2 康复机器人主动训练控制器设计
外骨骼式上肢康复机器人人机交互主动训练控制器的总体设计原则是:
1)保证速度控制器能够控制机器人各关节快速稳定地跟踪给定目标速度;
2)使系统具有一定的柔顺性,当患者的主动运动意图,即人机交互力矩变化时机器人的运动状态要随之做出相应的调整;
3)重视患者的主动参与,确保机器人手臂末端沿着预定义的轨迹按照患者的意图运动,当末端偏离预定义轨迹时应该予以矫正;
4)人机交互力矩信息的测量与应用要简单、有效.
结合上述原则,本文设计了一个基于无模型自适应的外骨骼式上肢康复机器人主动训练控制器,该控制器主要包括一个交互力矩信号无模型自适应滤波器、一个人机交互阻抗控制器和一个无模型自适应滑模速度控制器(Model free adaptive sliding mode control,MFASMC),能够实现机器人按照患者的意图辅助患者完成主动康复训练的功能,并在运动出现偏差时予以矫正.图3所示为主动交互训练控制算法功能实现的结构框图.其中,①为通过力传感器获得的各个关节的人机交互力矩信号;②为滤波后的人机交互力矩信号;③为阻抗控制器输出的各关节目标速度信号;④为各关节反馈回的速度信号;⑤为速度控制器输出的各关节控制力矩信号,其控制器结构图如图4所示;⑥为机器人系统输出的各关节角度变化,系统模型如图8所示;⑦为机器人系统输出的末端三维坐标变化;⑧为机器人系统非控制输入信号,包括人机交互力矩、摩擦力矩和不确定扰动等.

图3 主动交互训练控制器结构框图Fig.3 Control diagram of active interaction exercises
2.1 无模型自适应滑模速度跟踪控制

2.1.1 人机交互模型的动态线性化

其中Φ1(k),Φ2(k)是有界的动态变化的伪分块雅可比矩阵[39].
2.1.2 无模型自适应滑模控制器设计
1)无模型自适应控制器设计
为限制离散时间系统中控制输入的变化,减小可能产生的稳态跟踪误差,考虑如下控制输入准则函数:式中是给定的目标角速度,λ>0是一个权重因子,用来限制控制输入量的变化.为无模型自适应控制律.

由于上式包含矩阵求逆运算,当系统输入输出维数很大时,求逆运算非常耗时,不利于实际应用.所以将其简化,可得到如下控制算法:
式中ρ∈(0,1]是加入的步长因子,使得式(9)更具一般性.
2)伪分块雅可比矩阵估计算法
由以上动态线性化分析,外骨骼式上肢康复机器人交互系统动力学模型的近似离散形式(5)关于系统输入和输出的偏微分是连续的,并且满足广义Lipschitz条件,可以由带有时变伪雅可比矩阵参数Φ1(k)和Φ2(k)的动态线性化数据模型(6)来表示.基于控制输入准则函数(7)的极小化,可设计出无模型自适应控制律(9),为实现控制算法(9),需要已知Φ1(k)和Φ2(k)的值.由于系统准确的数学模型未知,且Φ1(k)和Φ2(k)是时变参数,其精确真实值很难获取.因此需要设计利用受控系统的输入输出数据来估计Φ1(k)和Φ2(k).本文使用修正的投影算法来估计未知的伪分块雅可比矩阵,考虑如下的估计准则函数:

将式(10)相对于Φ1(k),Φ2(k)进行微分,并令其结果为零,按照式(9)的思想处理,可得
3)无模型自适应滑模控制器设计
由于在动态线性化过程中将许多不确定因素做了简化,无模型自适应控制算法(9)是根据简化后的动态线性化模型(6)设计的控制律,其控制效果与期望值之间会存在一定的偏差.为减小这一偏差,保证系统快速收敛,特引入滑模趋近律[39].
对于外骨骼机器人动力学模型的变换形式(6),设离散滑模函数为

如果此时在式(9)所示的无模型自适应控制律基础上施加一个滑模控制律那么根据线性系统的可叠加性,设额外的滑模控制律将使系统产生的输出为

则离散滑模面将变为:

取离散滑模面的变化符合指数趋近律:

式中T是离散采样周期,ε>0,q>0,1−qT>0.为了防止抖振,采用饱和函数代替符号函数把式(13)代入式(14),可得
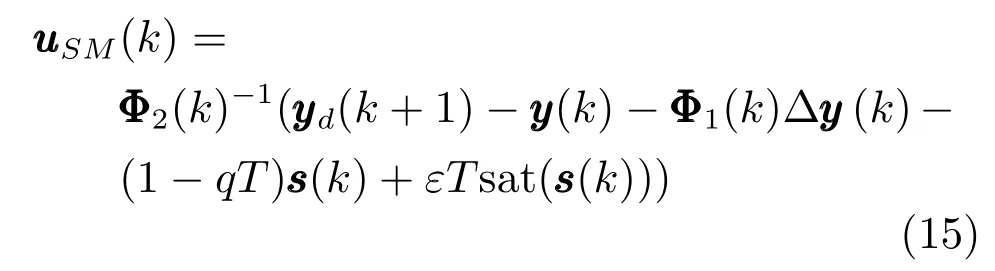
滑模控制律是在全格式动态线性化基础上进行的,无模型自适应律与滑模控制律共同作用于康复机器人交互系统动力学模型,同时无模型自适应律参与动态线性化模型时变参数Φ1(k)和Φ2(k)的估计,滑模控制律则在获得参数估计值的基础上,根据动态线性化模型调节系统输出与期望值间的偏差逐渐趋向于零.无模型自适应滑模控制器最终的形式是将式(9)与式(15)相加

式中,Γ=diag{γ1,···,γn}∈Rn×n,γi>0(i=1,2,···,n)是权重系数,可以调节系统的收敛速度.可知,无模型自适应滑模控制器(16)中用到的外骨骼式上肢康复机器人主动交互模型(2)中的信息就只有机器人自由度数n了.无模型自适应滑模控制器结构框图如图4所示,图中虚线部分即为图3所示的速度控制器(MFASMC).
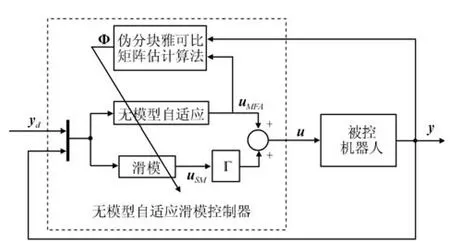
图4 无模型自适应滑模控制器结构图Fig.4 Structure of model free adaptive sliding mode control
2.1.3 稳定性分析
定理1.对于近似离散化的人机交互动力学系统非线性模型(5),在系统输出相对于和控制输入的偏微分是连续的,整个非线性系统满足广义Lipschitz的条件下,当系统给定值时,采用控制方案(9)、(11)、(15)和(16),则存在一个正数λ>0使得:
1)系统的跟踪误差是收敛的;
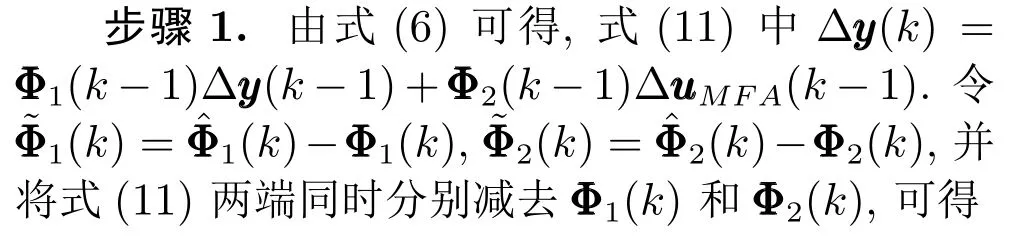
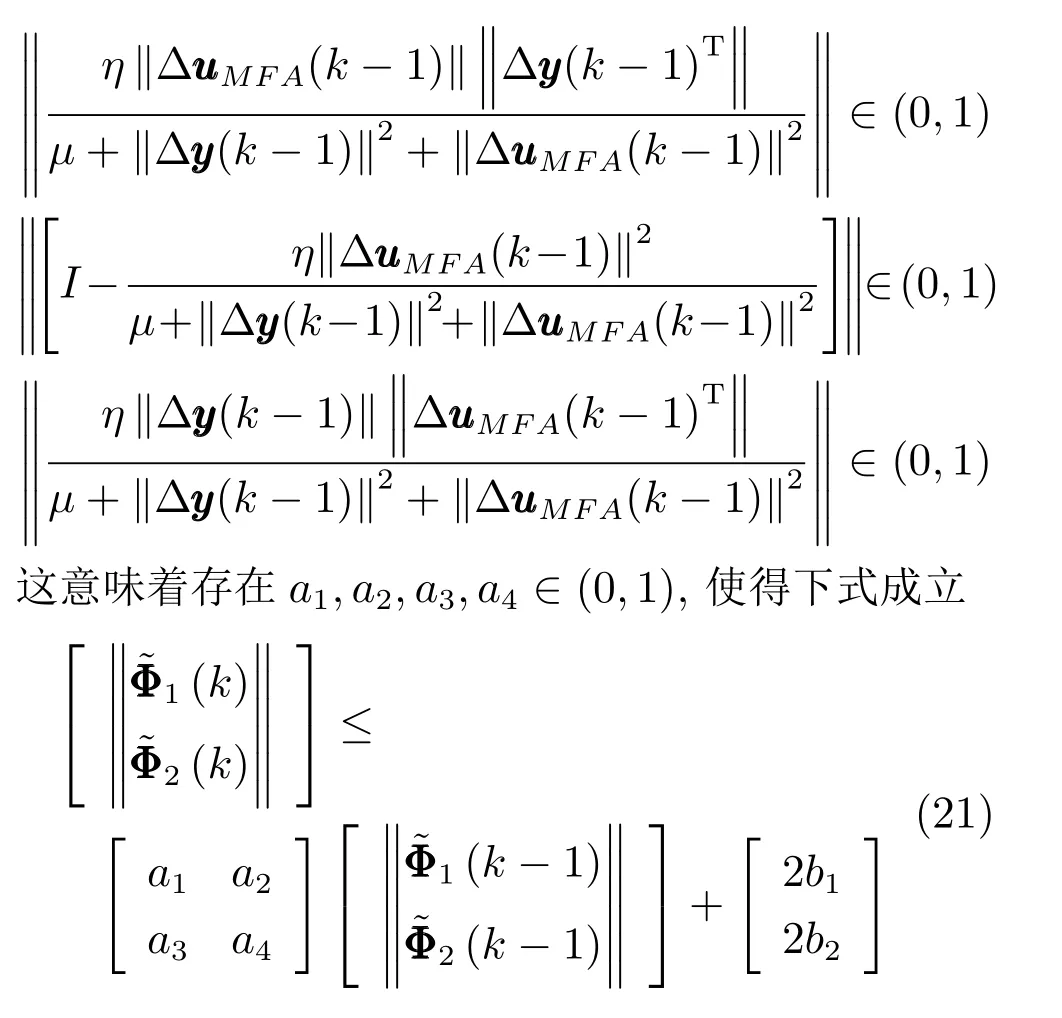
证明.此证明分为两步:步骤1证明伪分块雅可比矩阵估计值的有界性,步骤2证明系统跟踪误差的收敛性和BIBO稳定性.

步骤2.当动态线性化模型确定,并且其参数伪分块雅可比矩阵有界时,无模型自适应控制律调节系统所产生的偏差可以由滑模控制律补偿,已知系统滑模面取为

选取李雅普诺夫函数

只要满足条件


当采样时间T很小时,离散滑模的存在和到达性条件[40]为

由于基于指数的离散趋近律(14)满足上述条件[41],所以系统的运动轨迹会趋向于切换面即系统的跟踪误差是收敛的.结论1)得证.
由于系统是收敛的,那么动态线性化模型的输出值与给定量的差值也最终趋近于零,而动态线性化模型的时变参数伪雅可比矩阵,是根据无模型自适应律的变化在线估计的.将数据模型式(6)和控制算法式(9)代入式(22),得
总之,无模型自适应控制算法(9)为机器人系统系统动态线性化数据模型(6)的动态估计提供了有界的输入数据,基于指数趋近律的滑模控制算法(15)则补偿了动态线性化数据模型在初始时刻的偏差,加速了系统跟踪误差的收敛.
2.2 人机交互阻抗控制器的设计
在得到各关节交互力矩信号后,机器人需要根据当前的运动状态做出改变,以响应各关节的交互力矩的变化,实现人体上肢与康复机器人的柔顺交互.从机器人与环境的交互端看,其阻抗被定义为各关节的交互力矩与末端点运动之间的关系:

其中,J为机器人的雅可比矩阵是补偿力,相当于有一只虚拟的手在托着或者拉着患者手部,经雅可比矩阵转换为各关节的补偿力矩与人机交互力矩共同作用;和0分别代表机器人末端位置和参考轨迹上距离末端点最近的位置;末端速度和K2分别为刚度和阻尼系数.式(28)中各关节目标速度与交互力矩的关系可以采用阻抗中的导纳控制[42]形式来描述:

式(29)描述的是人机交互阻抗控制器中各关节给定的目标速度与交互力矩之间的关系,即人体上肢与外骨骼机器人之间的交互关系.由特性1可知,外骨骼机器人系统本身就是一个惯性系统,在下一节无模型自适应滤波器的设计也保证了阻抗控制器输入的人机交互力矩的平滑与连贯,为实现人机交互的灵敏性与柔顺性,式(29)中仅考虑了阻抗控制中的刚度系数与阻尼系数.
由式(29)可以看出,在进行主动交互训练过程中,机器人与人体上肢之间出现交互力矩的变化则相应关节的给定目标速度也会发生变化,该速度的变化程度取决于当前辅助力的大小、末端点偏离参考轨迹的距离以及阻抗控制中的阻尼系数K2;当运动过程中,末端点偏离参考轨迹(实际末端点位置通过各关节反馈的关节角度由机器人运动学方程计算而得),即时,各关节给定的目标速度也会作出相应调整,以使末端点回到参考轨迹上,调整幅度取决于刚度系数K1.
2.3 运动意图量化与无模型自适应滤波器的设计
本文采用的交互力传感器在外骨骼机器人上的分布如图5所示,相应传感器组合测量可以得到每个旋转关节对应的交互力信息.比如肩部外展/内收运动过程中,外展时外侧压力传感器采集到交互力信号,内收时内测压力传感器采集到交互力信号,两者做差即可得到交互力信号的大小和方向.每个传感器都安装在机器人的固定位置上,其与各关节旋转轴的距离也是固定的,因此测量得到的交互力信号可以根据其与旋转轴的距离计算得到人机交互力矩值作为量化的运动意图.设第i个交互力传感器采集到的交互力为FPi,传感器i距旋转轴的距离为Li,那么相应的交互力矩值

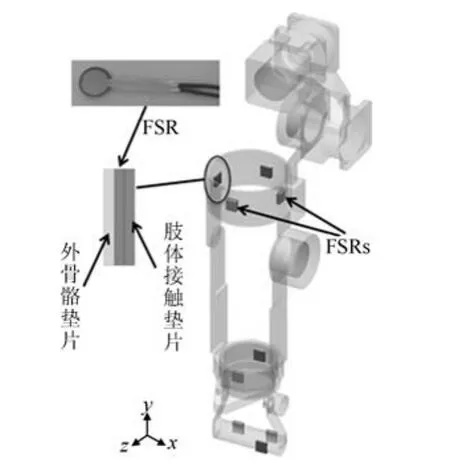
图5 交互力传感器分布图Fig.5 Distribution of interaction force sensor
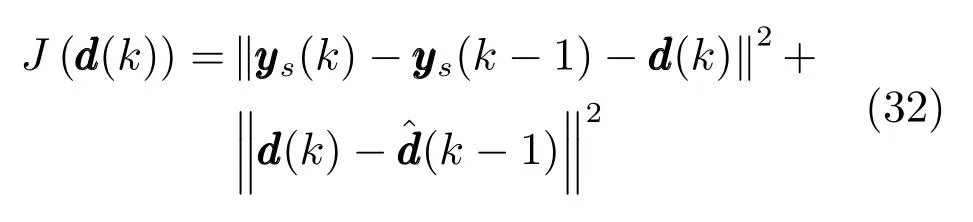
由于患者自身无法连续平滑地控制力量和运动,所以交互力矩信号存在波动大、不够平滑、随机不确定和无法准确建模等问题,不能直接用于控制.在使用交互力矩信号之前需要对采集到的信号进行滤波处理.现有滤波算法主要是针对噪声问题设计的,而滤除噪声后震颤和停顿等异常问题仍然存在.所以本文针对人机交互力矩存在的特有问题,提出了无模型自适应滤波算法,在保证交互力携带信息不变的前提下,使人机交互力矩变得平滑连贯,从而保证速度控制器的给定量不会产生间断和突变,不致对控制系统的稳定性造成影响.
设现时采集到的交互力矩信号向量可以表达成前一时刻采集到的信号向量和前一时刻信号变化向量的线性组合:

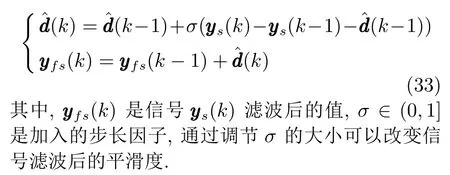
在实验中测量得到一路交互力矩信号τh1,分别采用式(33)的无模型自适应滤波器和具有类似功能的巴特沃斯滤波器[44−45]滤波并比较效果,如图6所示,可以看出原始力矩信号确实存在震颤、停顿和突变等不确定问题.
由图6(a)可以看出,无模型自适应滤波器能够满足滤波需求,且只有一个需要调节的参数,随着σ的减小信号越来越平滑而连贯;由图6(b)可以看出,经过合理的调节,巴特沃斯滤波器能够滤除高频力矩信号,并保持一定的平滑性,随着截止频率ωc的降低信号会越来越平滑,但是阶数n的增加会导致信号的偏移增大,信号突变时还会产生超调.巴特沃斯滤波器的阶数n和截止频率ωc的确定需要对原始信号有一定的了解和分析,而人机交互过程中交互力矩的变化是难以确定的,再加上由式(33)可以看出无模型自适应滤波器在编程实现和调节上要简单得多,所以本文采用无模型自适应滤波器实现人机交互力矩的连贯和平滑处理.

图6 交互力矩信号τh1滤波效果比较Fig.6 Filtering performance comparison of interaction torqueτh1
3 主动训练仿真及结果

图7 虚拟现实引导界面Fig.7 Guiding interface in virtual reality
在康复训练过程中,为了增强患者的代入感,有许多虚拟现实游戏[9,46]被设计出来,用于引导患者完成康复训练动作.本文设计了图7所示的虚拟训练环境,向患者提供视觉反馈引导,同时记录训练数据,向医生提供评价参考.虚拟环境参与主动交互康复训练的过程是,患者穿戴上外骨骼式上肢康复机器人,同时分别对5个关节施加交互力,主动带动外骨骼末端点沿着预定义参考轨迹去接触闪动的球.当外骨骼机器人末端点沿着轨迹运动时会感受到一定的阻尼;当外骨骼机器人末端偏离预定义的轨迹时,控制器会调整各关节运动速度,使末端点回到预定义的轨迹上来.整个训练过程都由虚拟现实界面实时显示,可以让患者实时了解当前的运动状态并作出反应.
3.1 Simulink建模
忽略零件细节,机器人主体结构可以分为六个部分:肩部固定部分(JBGD),与机器人支撑架相连,作为机器人在三维空间运动的坐标原点;肩部外展部分(JBWZ),与机器人肩部固定部分相连,实现第一个自由度,带动患者患肢进行肩部外展/内收运动;肩部俯仰部分(JBFY),与机器人肩部外展部分相连,实现第二个自由度,带动患者患肢进行肩部俯仰运动;肘部回转部分(ZBHZ),与机器人肩部俯仰部分相连,实现第三个自由度,带动患者患肢进行肘部屈伸运动;腕部回转部分(WBHZ),与机器人肘部回转部分相连,实现第4个自由度,带动患者患肢进行腕部的内旋/外旋运动;腕部俯仰部分(WBFY),与机器人腕部回转部分相连,实现第5个自由度,带动患者患肢进行腕部俯仰运动.
据此,在三维机械设计软件SolidWorks中构建各杆件造型.然后利用SimMechanics插件导入Simulink,添加相应运动副驱动和检测等功能模块,选择输入输出变量,采用Simulink子系统封装技术,建立上肢康复机器人SimMechanics模型如图8所示.可以看出机器人主体结构6个部分之间的串联关系.整个外骨骼式上肢康复机器人Simulink仿真模型有5个力矩输入、5个关节角度输出和1个末端点三维坐标输出.
3.2 五自由度主动交互训练控制仿真
采用外骨骼式上肢康复机器人进行主动交互训练,是要让患者主动地控制患肢沿着给定的参考轨迹运动,这条轨迹是预定义的、非时变的.当运动偏离这条轨迹时,机器人应该予以矫正;偏离过多时应该停止训练并重新评价患者病情.患者产生主动运动意图时,机器人将配合患者运动,否则即停止运动,一切运动状态改变的源头是患者的主动运动意图.在训练过程中,机器人能够提供一定的助力实现辅助运动、提供一定的阻力实现抗阻运动或者完全跟踪不施加任何干扰力而实现主动运动.
本文设关节摩擦力矩与角速度的关系如图9,选用不同的交互参数,按照图3所示的结构框图,在图8所示的机器人模型上进行主动交互训练仿真,仿真过程中通过串口实时读取各个关节的原始交互力矩信号如图10所示.采用本文提出的控制方法实现上述控制目标,观察不同交互参数对主动交互训练控制效果的影响.

图8 SimMechanics模型结构Fig.8 Structure of SimMechanics model

图9 摩擦力矩与角速度的关系Fig.9 The relationship between joint friction torques and angular velocity
设采样时间T=0.001s;采用与图10相同的仿真时间6s,阻抗控制器为式(29),由于重力是患者的上肢运动所要克服的主要困难之一,所以补偿力分别取重力分量Fgy={−2,0,2},刚度系数K1的大小调节的是参考轨迹对康复运动的限制程度,分别取K1={0,200,800},K2=2;其他控制器参数为固定值,无模型自适应滤波器为式(33),取其参数σ=0.05;无模型自适应滑模控制器为式(16),取其参数µ=2,η=1,λ=2,ρ=0.3,q=900,ε=10,Γ=diag{85,25,3,1,2}.以阻抗控制参数Fgy=0,K1=800,K2=2为对比参照,分别在图11和图12中画出补偿力Fgy和K1对人机交互控制效果的影响.

图10 各关节交互力矩原始信号Fig.10 The original signal of each joint interaction torque
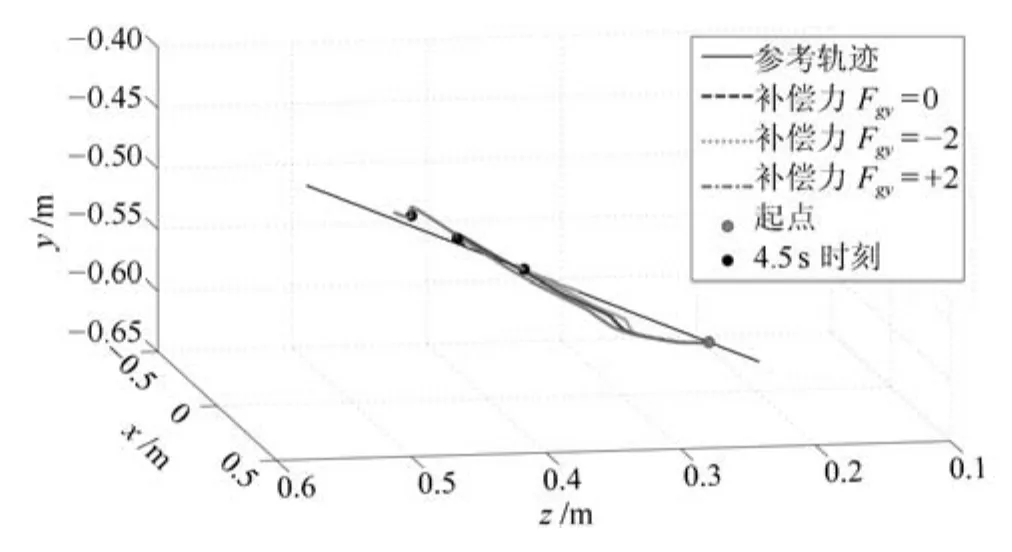
图11 补偿力Fgy对主动训练末端轨迹的影响Fig.11 The impact of compensation forceFgyto the end trajectory of active training
图11中显示的是补偿力对主动训练末端轨迹的影响,结果显示:当补偿力的重力分量Fgy为零时,根据交互力矩τh的变化,机器人末端点沿着参考轨迹运动;当偏离轨迹时阻抗控制器会调整给定目标速度使末端点回到参考轨迹上;t=4.5s以后,交互力矩全部为零,阻抗控制器引导末端点回到参考轨迹上然后停止.当补偿力的重力分量Fgy=−2N时,相当于在运动过程中患者手部加了一个2N的负载,患者主动训练会更费力,从图中表现的就是运动的距离变短;t=4.5s以后,交互力矩全部为零,由于补偿力重力分量Fgy的作用,末端点会沿着参考轨迹继续向下运动.当补偿力的重力分量Fgy=+2N时,相当于在运动过程中患者手部有一个向上的2N的支撑力,患者的主动训练要更省力,从图中表现的就是运动的距离变长了;t=4.5s以后,交互力矩全部为零,由于补偿力重力分量Fgy的作用,阻抗控制器会引导末端点沿着参考轨迹继续向上运动.
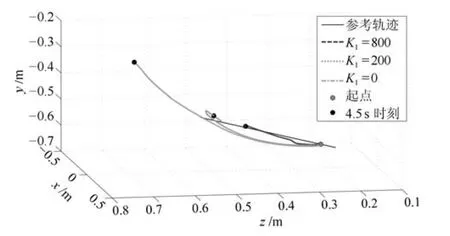
图12 刚度系数K1对主动训练末端轨迹的影响Fig.12 The impact of stifness coefcientK1to the end trajectory of active training
图12中显示的是刚度系数对主动训练末端轨迹的影响,结果显示:当刚度系数K1=800时,参考轨迹对机器人末端点的约束较强,机器人末端点根据交互力矩τh的变化沿着参考轨迹运动,末端轨迹偏离参考轨迹的距离较小;t=4.5s以后,交互力矩全部为零,阻抗控制器引导末端点回到参考轨迹上然后停止.当刚度系数K1=200时,参考轨迹对机器人末端点的约束相对较弱,在运动过程中末端轨迹偏离参考轨迹的距离较大;t=4.5s以后,交互力矩全部为零,阻抗控制器也能引导末端点回到参考轨迹上然后停止.当刚度系数K1=0时,参考轨迹对机器人末端点没有任何约束,机器人末端点完全根据交互力矩自由运动;t=4.5s以后,交互力矩全部为零时机器人即停止运动.
在上述主动康复训练过程中,阻抗控制参数Fgy=0,K1=800,K2=2时,如图13(a)所示为外骨骼机器人受到的外界扰动,包括摩擦力矩、人体上肢对机器人的交互力矩(如图10)和随机不确定环境噪声;图13(b)所示为有界而稳定的机器人系统控制输入;图13(c)~13(g)所示为阻抗控制器输出的各关节给定目标速度和无模型自适应滑模控制器控制各关节速度跟踪情况,结果显示该控制器能够在图13(a)所示扰动存在的情况下控制外骨骼机器人跟踪不规则非线性速度输入.
3.3 三自由度主动交互训练控制仿真
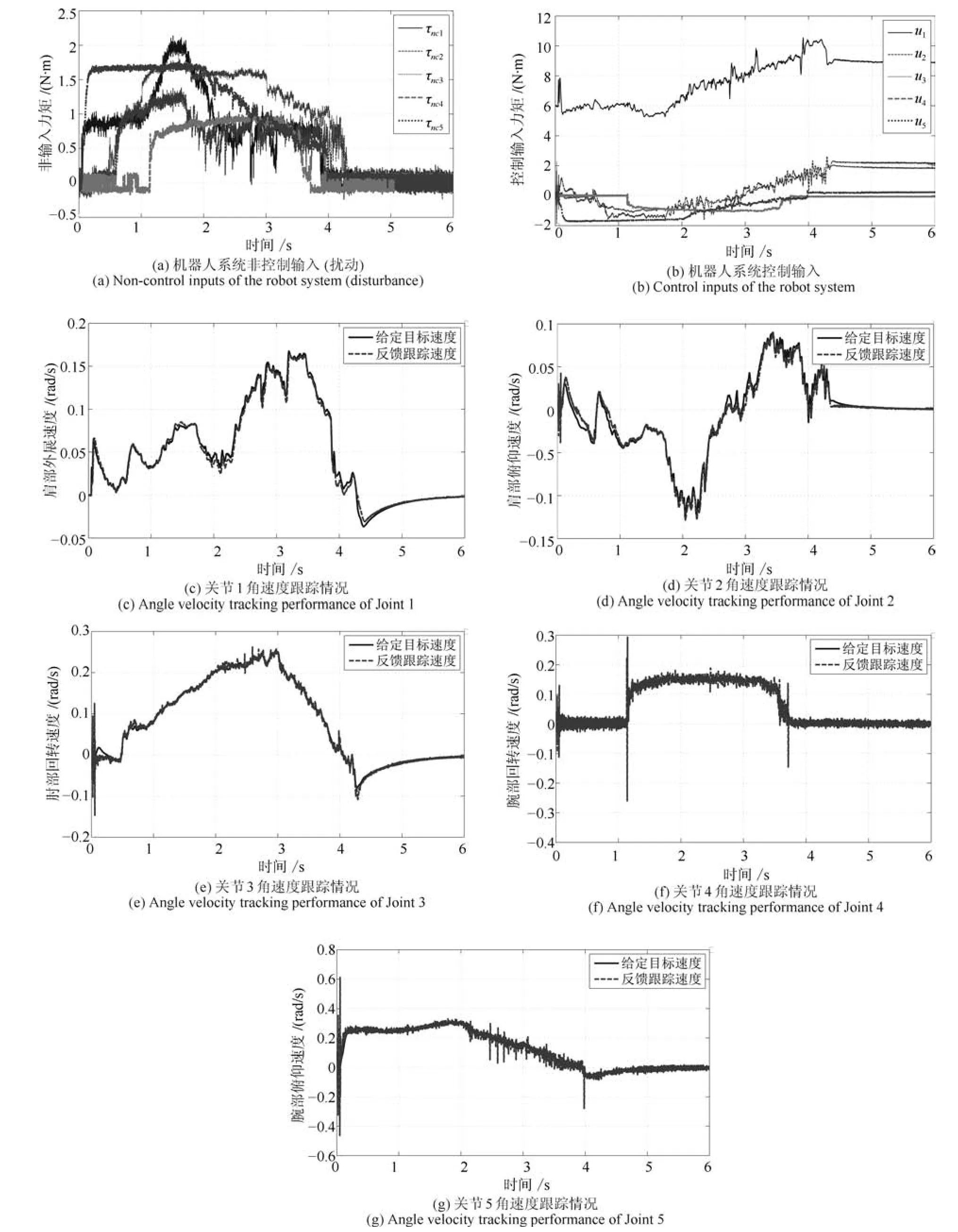
图13 五自由度主动交互训练仿真中主要变量的状态变化Fig.13 Control results of fve degree-of-freedom active interaction training exercise
为验证主动交互控制器的通用性,将外骨骼式上肢康复机器人腕部两个关节固定,这样五自由度的机器人就退化为三自由度的机器人.图8所示仿真模型变为3个力矩输入、3个关节角度输出和1个末端点三维坐标输出.由于机器人的自由度数发生了改变,相应的主动交互控制器也要重新进行设计.采用常规方法,需要重新对三自由度主动交互模型建模分析,设计辨识实验确定相关参数,完成控制器的设计.而采用本文方法,只需考虑机器人自由度数的变化,设采样时间T=0.001s,仿真时间仍为6s;无模型自适应滤波器为式(33),取其参数σ=0.05;阻抗控制器为式(29),取其参数K1=800,K2=2;无模型自适应滑模控制器为式(16),取其参数µ=2,η=1,λ=2,ρ=0.3,q=900,ε=10,Γ=diag{85,25,3},上述控制器维数均由5降为3.人机交互力矩与摩擦力矩模型与五自由度交互训练仿真相同,取其前三维.图14所示为相应的三自由度主动交互训练仿真中主要变量的状态变化.
由五自由度改为三自由度,可以看作康复机器人的结构发生了改变.从图14(a)中可以看出根据交互力矩的变化,机器人末端点沿着参考轨迹运动;当偏离轨迹时阻抗控制器会调整给定目标速度使末端点回到参考轨迹上;t=4.5s以后,交互力矩全部为零,阻抗控制器引导末端点回到参考轨迹上然后停止.图14(b)所示的是外骨骼机器人受到的外界扰动,包括摩擦力矩、人体上肢对机器人的交互力矩和随机不确定环境噪声.图14(c)所示为有界而稳定的机器人系统控制输入.图14(d)~14(f)所示为阻抗控制器输出的各关节给定目标速度和无模型自适应滑模控制器控制各关节速度跟踪情况,结果显示在图14(b)所示的不确定扰动存在的环境中,各关节角速度能够跟踪给定目标速度.
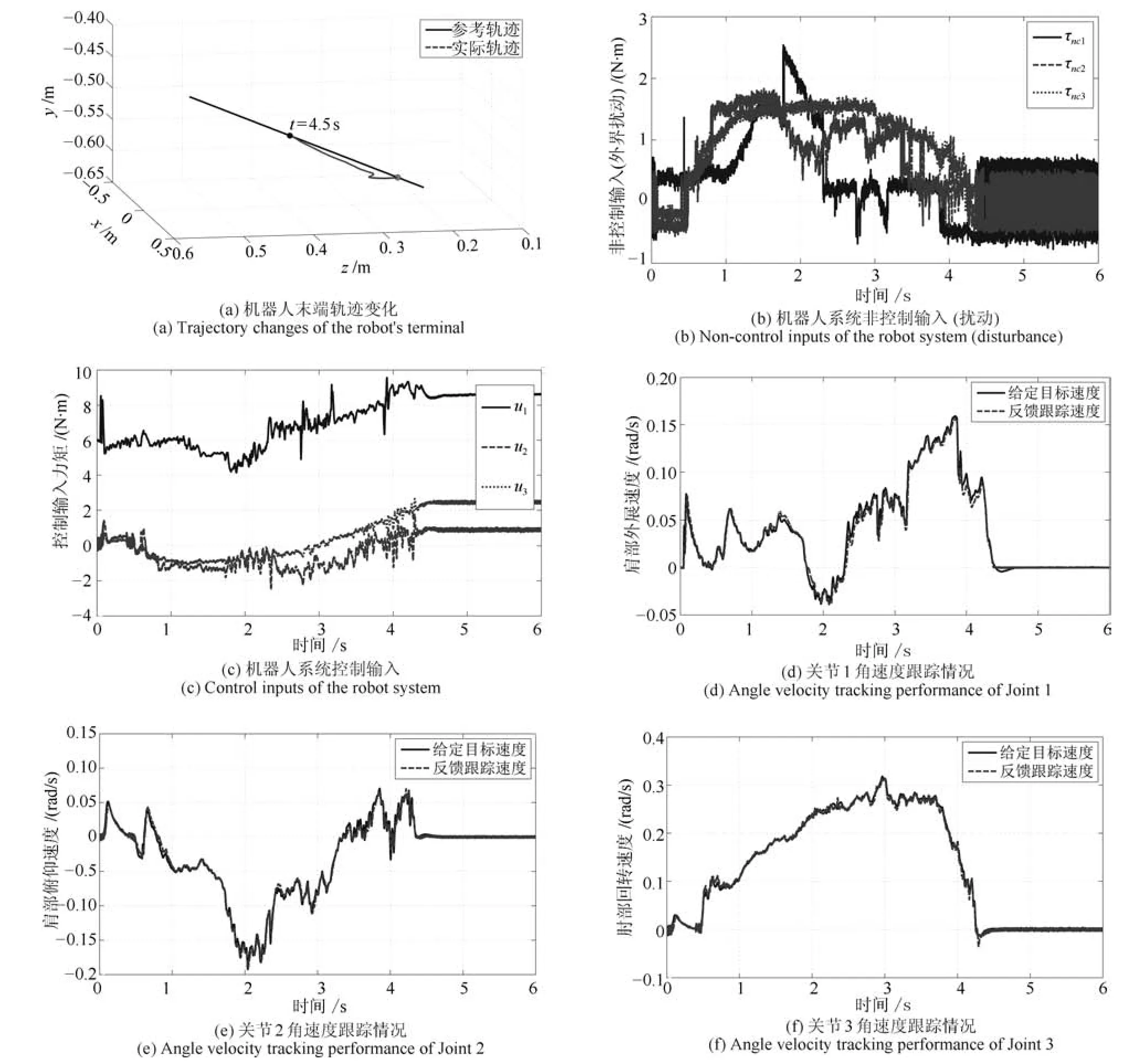
图14 三自由度主动交互训练仿真中主要变量的状态变化Fig.14 Control results of three degree-of-freedom active interaction training exercises
4 结论
本文基于五自由度外骨骼式上肢康复机器人平台,设计了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法并通过仿真进行了验证.首先,通过人体上肢与机器人接触面安装的力传感器采集人机交互力信息,由于传感器与对应旋转轴的距离是固定的,所以可以将其转化为人机交互力矩,并利用无模型自适应滤波算法使交互力矩变得平滑而连贯,作为量化的运动意图;然后采用阻抗控制器,以人机交互力矩为驱动,综合考虑机器人末端点与参考轨迹的相对位置和补偿力的信息,调节各关节的给定目标速度;最后使用无模型自适应滑模控制器完成机器人各关节对目标速度的跟踪.
该方法可以实现外骨骼式上肢康复机器人对患者患肢主动交互训练的辅助,控制机器人按照患者的运动意图完成主动交互训练任务,并在运动出现偏差时予以矫正.控制器在设计实现过程中不要求复杂准确的动力学建模和参数识别,并有一定的抗干扰性和通用性.
1 Norouzi-Gheidari N,Archambault P S,Fung J.Efects of robot-assisted therapy on stroke rehabilitation in upper limbs:systematic review and meta-analysis of the literature.Journal of Rehabilitation Research and Development, 2012,49(4):479−496
2 Connell L A,Mcmahon N E,Harris J E,Watkins C L,Eng J J.A formative evaluation of the implementation of an upper limb stroke rehabilitation intervention in clinical practice:a qualitative interview study.Implementation Science,2014,9:90,DOI:10.1186/s13012-014-0090-3
3 He Wen,Wang Kai.Advance in rehabilitation of upper limb function in hemiplegic patients after stroke(review).Chinese Journal of Rehabilitation Theory and Practice,2014,20(4):334−339 (何雯,王凯.脑卒中后上肢功能康复研究进展.中国康复理论与实践,2014,20(4):334−339)
4 Xia Bin,Wu Rui,Liu He-Yu.Clinical research on upper limb rehabilitation robot for upper limb movement function in patients with hemiplegia therapy.Chinese Journal of Practical Nervous Diseases,2014,17(9):104−106 (夏彬,吴睿,刘合玉.上肢康复机器人对偏瘫患者上肢运动功能治疗的临床研究.中国实用神经疾病杂志,2014,17(9):104−106)
5 Frisoli A,Procopio C,Chisari C,Creatini I,Bonfglio L, Bergamasco M,Rossi B,Carboncini M C.Positive efects of robotic exoskeleton training of upper limb reaching movements after stroke.Journal of NeuroEngineering and Rehabilitation,2012,9:36,DOI:10.1186/1743-0003-9-36
6 Ren Y P,Kang S H,Park H S,Wu Y N,Zhang L Q.Developing a multi-joint upper limb exoskeleton robot for diagnosis,therapy,and outcome evaluation in neurorehabilitation.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2013,21(3):490−499
7 Lo H S,Sheng Q X.Exoskeleton robots for upper-limb rehabilitation:state of the art and future prospects.Medical Engineering and Physics,2012,34(3):261−268
8 Yang Qi-Zhi,Cao Dian-Feng,Zhao Jin-Hai.Analysis on state of the art of upper limb rehabilitation robots.Robot, 2013,35(5):630−640 (杨启志,曹电锋,赵金海.上肢康复机器人研究现状的分析.机器人,2013,35(5):630−640)
9 Frisoli A,Sotgiu E,Procopio C,Bergamasco M,Rossi B, Chisari C.Design and implementation of a training strategy in chronic stroke with an arm robotic exoskeleton.In:Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics(ICORR).Zurich,Switzerland:IEEE, 2011.1−8
10 Lee G D,Wang W W,Lee K W,Lin S Y,Fu L C,Lai J S,Chen W S,Luh J J.Arm exoskeleton rehabilitation robot with assistive system for patient after stroke.In:Proceedings of the 12th IEEE International Conference on Control,Automation and Systems(ICCAS).Jeju Island,Korea: IEEE,2012.1943−1948
11 Hu J,Hou Z G,Zhang F,Chen Y X,Li P F.Training strategies for a lower limb rehabilitation robot based on impedance control.In:Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society(EMBC).San Diego,CA,USA:IEEE,2012. 6032−6035
12 Peng Liang,Hou Zeng-Guang,Wang Wei-Qun.Synchronous active interaction control and its implementation for a rehabilitation robot.Acta Automatica Sinica,2015,41(11): 1837−1846 (彭亮,侯增广,王卫群.康复机器人的同步主动交互控制与实现.自动化学报,2015,41(11):1837−1846)
13 Cao J H,Xie S Q,Das R,Zhu G L.Control strategies for effective robot assisted gait rehabilitation:the state of art and future prospects.Medical Engineering and Physics,2014,36(12):1555−1566
14 Zhang Z,Sup F.Activity recognition of the torso based on surface electromyography for exoskeleton control.Biomedical Signal Processing and Control,2014,10:281−288
15 Li Z J,Huang Z C,He W,Su C Y.Adaptive impedance control for an upper limb robotic exoskeleton using biological signals.IEEE Transactions on Industrial Electronics,DOI: 10.1109/TIE.2016.2538741
16 Khan A M,Yun D W,Ali M A,Zuhaib K M,Yuan C,Iqbal J,Han J,Shin K,Han C.Passivity based adaptive control for upper extremity assist exoskeleton.International Journal of Control,Automation and Systems,2016,14(1):291−300
17 Ding Qi-Chuan,Xiong An-Bin,Zhao Xin-Gang,Han Jian-Da.A review on researches and applications of sEMG-based motion intent recognition methods.Acta Automatica Sinica, 2016,42(1):13−25 (丁其川,熊安斌,赵新刚,韩建达.基于表面肌电的运动意图识别方法研究及应用综述.自动化学报,2016,42(1):13−25)
18 Rahman M H,Ochoa-Luna C,Rahman M J,Saad M,Archambault P.Force-position control of a robotic exoskeleton to provide upper extremity movement assistance.International Journal of Modelling,Identifcation and Control, 2014,21(4):390−400
19 Lee H D,Lee B K,Kim W S,Hanb J S,Shinc K S,Han C S.Human-robot cooperation control based on a dynamic model of an upper limb exoskeleton for human power amplifcation.Mechatronics,2014,24(2):168−176
20 Chen S H,Lien W M,Wang W W,Lee G D,Hsu L C,Lee K W,Lin S Y,Lin C H,Fu L C,Lai J S,Luh J J,Chen W S.Assistive control system for upper limb rehabilitation robot.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2016,24(11):1199−1209
21 Wang W Q,Hou Z G,Tong L,Chen Y X,Peng L,Tan M.Dynamics modeling and identifcation of the humanrobot interface based on a lower limb rehabilitation robot. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation(ICRA).Hong Kong,China: IEEE,2014.6012−6017
22 Wang X F,Li X,Wang J H.Modeling and identifcation of the human-exoskeleton interaction dynamics for upper limb rehabilitation.In:Proceedings of the 2015 Chinese Intelligent Automation Conference.Berlin Heidelberg,Germarny: Springer,2015,338:51−60
23 Anam K,Al-Jumaily A A.Active exoskeleton control systems:state of the art.Procedia Engineering,2012,41: 988−994
25 Li Z J,Su C Y,Li G L,Su H.Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs.IEEE Transactions on Fuzzy Systems,2015,23(3):555−566
26 Li Z J,Wang B C,Sun F C,Yang C G,Xie Q,Zhang W D.sEMG-based joint force control for an upper-limb powerassist exoskeleton robot.IEEE Journal of Biomedical and Health Informatics,2014,18(3):1043−1050
27 Hou Zhong-Sheng,Xu Jian-Xin.On data-driven control theory:the state of the art and perspective.Acta Automatica Sinica,2009,35(6):650−667 (侯忠生,许建新.数据驱动控制理论及方法的回顾和展望.自动化学报,2009,35(6):650−667)
28 Hou Z S,Jin S T.Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems.IEEE Transactions on Neural Networks,2011,22(12):2173−2188
29 Li Q L,Wang D Y,Du Z J,Sun L N.A novel rehabilitation system for upper limbs.In:Proceedings of the 27th Annual Conference of the Engineering in Medicine and Biology.Shanghai,China:IEEE,2006.6840−6843
30 Huang J,Huo W G,Xu W X,Mohammed S,Amirat Y.Control of upper-limb power-assist exoskeleton using a humanrobot interface based on motion intention recognition.IEEE Transactions on Automation Science and Engineering,2015,12:1257−1270
31 Craig J J[Author],Yun Chao[Translator].Introduction to Robotics:Mechanics and Control(Third edition).Beijing: China Machine Press,2006. (Craig J J[著],贠超[译].机器人学导论.第3版.北京:机械工业出版社,2006.)
32 Niku S B[Author],Sun Fu-Chun,Zhu Ji-Hong,Liu Guo-Dong[Translator].Introduction to Robotics:Analysis,Control,Applications(Second edition).Beijing:Electronic Industry Press,2013. (Niku S B[著],孙富春,朱纪洪,刘国栋[译].机器人学导论-分析、控制及应用.第2版.北京:电子工业出版社,2013.)
33 Wu Wen-Xiang.Joint Friction Analysis and Low-Speed High-Precision Motion Control of Multi-DOF Serial Robot [Ph.D.dissertation],Zhejiang University,China,2013 (吴文祥.多自由度串联机器人关节摩擦分析与低速高精度运动控制[博士学位论文],浙江大学,中国,2013)
34 Liu Jin-Kun.Design and MATLAB Simulation of Robot Control System.Beijing:Tsinghua University Press,2008. (刘金琨.机器人控制系统的设计与MATLAB仿真.北京:清华大学出版社,2008.)
35 Hu Sheng-Bin.Sliding Mode Control for Nonlinear Multi Joint Robot System.Beijing:National Defence of Industry Press,2015. (胡盛斌.非线性多关节机器人系统滑模控制.北京:国防工业出版社,2015.)
36 Matkowski J.Uniformly bounded composition operators between general Lipschitz function normed spaces.Topological Methods in Nonlinear Analysis,2011,38(2):395−405
37 Ekramian M,Sheikholeslam F,Hosseinnia S,Yazdanpanah M J.Adaptive state observer for Lipschitz nonlinear systems.Systems and Control Letters,2013,62(4):319−323
38 Hou Z S,Jin S T.Model Free Adaptive Control:Theory and Applications.Florida,USA:Chemical Rubber Company Press,2013.
39 Wang X F,Li X,Wang J H,Fang X K,Zhu X F.Datadriven model-free adaptive sliding mode control for the multi degree-of-freedom robotic exoskeleton.Information Sciences,2016,327:246−257
40 Sarpturk S,Istefanopulos Y,Kaynak O.On the stability of discrete-time sliding mode control systems.IEEE Transactions on Automatic Control,1987,32(10):930−932
41 Gao W B,Wang Y F,Homaifa A.Discrete-time variable structure control systems.IEEE Transactions on Industrial Electronics,1995,42(2):117−122
42 Culmer P R,Jackson A E,Makower S,Richardson R,Cozens J A,Levesley M C,Bhakta B B.A control strategy for upper limb robotic rehabilitation with a dual robot system.IEEE/ASME Transactions on Mechatronics,2010,15(4): 575−585
43 Hou Z S,Jin S T.A novel data-driven control approach for a class of discrete-time nonlinear systems.IEEE Transactions on Control Systems Technology,2011,19(6):1549−1558
44 Li Zhong-Shen.The design of butterworth lowpass flter based on MATLAB.Information Technology,2003,27(3): 49−50,52 (李钟慎.基于MATLAB设计巴特沃斯低通滤波器.信息技术, 2003,27(3):49−50,52)
45 Mello R G T,Oliveira L F,Nadal J.Digital Butterworth flter for subtracting noise from low magnitude surface electromyogram.Computer Methods and Programs in Biomedicine,2007,87(1):28−35
46 Burke J W,McNeill M,Charles D,Morrow P,Crosbie J, McDonough S.Serious games for upper limb rehabilitation following stroke.In:Proceedings of the 2009 Conference in Games and Virtual Worlds for Serious Applications.Coventry,UK:IEEE,2009.103−110
王晓峰东北大学信息学院自动化研究所博士研究生.2012年获得东北大学信息学院自动化专业学士学位.主要研究方向为上肢康复系统与机器人控制技术.
E-mail:wxfamy@yeah.net
(WANG Xiao-FengPh.D.candidate at the Institute of Automation, Northeastern University.He received his bachelor degree in automation from Northeastern University in 2012.His research interest covers upper-limb rehabilitation systems and robot control.)

李 醒东北大学流程工业综合自动化国家重点实验室助理教授.2012年获得东北大学电力电子与电子传动专业博士学位.主要研究方向为自适应/鲁棒控制,运动控制,智能机器人系统.本文通信作者.E-mail:lixing8245@163.com
(LI XingAssistant professor at the State Key Laboratory of Synthetical Automation for Process Industries,Northeastern University.She received her Ph.D.degree in power electronics and power transmission from Northeastern University in 2012.Her research interest covers adaptive/robust control, motion control,intelligent robot system.Corresponding author of this paper.)

王建辉东北大学信息学院教授.分别于1982,1986与1999年在东北大学获得学士,硕士和博士学位.主要研究方向为智能控制理论与应用.
E-mail:wangjianhui@mail.neu.edu.cn
(WANG Jian-HuiProfessor at the College of Information Science and Engineering,Northeastern University.She received her bachelor,master and Ph.D.degrees in electrical engineering from Northeastern University in 1982,1986, and 1999,respectively.Her research interest covers intelligent control theory and its application.)
Active Interaction Exercise Control of Exoskeleton Upper Limb Rehabilitation Robot Using Model-free Adaptive Methods
WANG Xiao-Feng1,2LI Xing1WANG Jian-Hui1,2
This paper proposes an active interaction exercise control method for the exoskeleton upper limb rehabilitation robot based on model-free adaptive algorithm.Force sensors are mounted on the contact surface of the robot and the human upper limb to collect human-robot interaction torque information which is used to quantize active movement intention.A model-free adaptive fltering algorithm is designed to make the interaction torque smooth and continuous.A human-robot interaction impedance controller is designed for adjusting the given target velocity of each joint,according to the input of interaction torque and considering the relative position of the robot end-point to the reference trajectory and the compensation force information.By combining the model-free adaptive algorithm and the sliding mode exponential reaching law,a speed controller for all the joints of the robot is developed to implement the target speed tracking. Simulation results show that this control method can achieve the function of the exoskeleton for upper limb rehabilitation, which is to assist patients to complete the active interaction training exercise.By adjusting the corresponding parameters of the human-robot interaction impedance controller,the robot can perform diferent tasks of the active interaction training exercise in the light of patients'active movement intention,and give correction in motion deviation.In the designing and implementing the controller,complicated and accurate dynamic modeling and parameter identifcation are not required, and the control method has a certain degree of immunity and versatility.
Model free adaptive,rehabilitation robot,active interaction,force sensor,impedance control
王晓峰,李醒,王建辉.基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.自动化学报,2016,42(12):1899−1914
Wang Xiao-Feng,Li Xing,Wang Jian-Hui.Active interaction exercise control of exoskeleton upper limb rehabilitation robot using model-free adaptive methods.Acta Automatica Sinica,2016,42(12):1899−1914
2016-01-20 录用日期2016-11-03
Manuscript received January 20,2016;accepted November 3, 2016
国家自然科学基金(61503070),中央高校基本科研业务费专项资金(N150804001)和2015辽宁省博士点专项基金(201501142)资助
Supported by National Natural Science Foundation of China (61503070),Fundamental Research Funds for the Central Universities(N150804001),and 2015 Liaoning Province Doctoral Fund(201501142)
本文责任编委程龙
Recommended by Associate Editor CHENG Long
1.东北大学流程工业综合自动化国家重点实验室 沈阳 110819 2.东北大学信息学院自动化研究所沈阳110819
1.State Key Laboratory of Synthetical Automation for Process Industries,Northeastern University,Shenyang 110819 2.Institute of Automation,College of Information Science and Engineering,Northeastern University,Shenyang 110819
